全向可调卫星侧板安装设备设计与应用
2018-10-23车腊梅马海龙任维松
陈 琦,车腊梅,马海龙,任维松,李 民,姜 林
(1. 上海卫星装备研究所; 2. 上海裕达实业有限公司:上海 200240)
0 引言
现阶段卫星多为板框式结构,大量的单机和电池都安装在侧板上。在卫星总装的早期阶段,侧板上的单机产品较少,通过手工装拆或者行车辅助等就可以完成工作任务。随着卫星集成化程度的提高,侧板的尺寸和质量均大幅增加,如某型号电池板尺寸达2800 mm×1800 mm,质量达200 kg,手工已经不可能实现装拆。现阶段在整个AIT过程中,侧板需要进行多次的安装和拆卸,而在对卫星的供电系统进行可靠性测试、老炼试验时,侧板需要打开一定的角度或者位移,从而为电池的有效散热提供环境可靠性保障[1]。因此,侧板的操作涉及平移、升降、翻转、旋转、偏摆等运动,其安装设备需要具备六自由度全方向调节的能力。
常用的卫星侧板安装设备的升降机构有丝杠升降式、剪叉式、定滑轮绳索抬升式等典型结构形式,其中丝杠升降式结构为了克服质心的变化常常需使用导向器或者多根丝杠升降机进行抬升以减弱弯矩的影响,使结构变得较为复杂,且设备的抬升高度较小;剪叉式结构在较高的升限要求时需要使用多段剪叉,其侧向的稳定性不够理想,侧板会晃动,且不适合承受偏心负载;定滑轮绳索抬升式结构的竖直抬升立柱使侧板的尺寸受到限制,且设备的高度会高于侧板的升高高度,运输不便[2-3]。可见,这几种结构形式都存在着一定的局限性。机械臂具有六自由度的调节功能,灵活性高,但侧板安装设备投产数量多,闲置率很高,还需要到处移动,适用于生产线的机械臂并不非常适合于卫星装配的实际生产情况[4]。因此,需要研制一款结构紧凑、造价低廉,类似于机械臂的全向可调侧板安装设备,且应具备以下功能:1)使用电机驱动获得大行程运动;2)实现与卫星接触时的手动微调。
1 结构设计
1.1 总体方案设计
全向可调卫星侧板安装设备结构如图1所示,分为底座、升降(包含x、y、z方向的移动)和姿态调节(包含绕x、y、z轴的旋转)等部分。其相比于常用安装设备(图2),最突出的特点是将3个移动自由度集中在1个机构中实现,且该机构设置在底座上,用于进行集中式的行程调节;将3个旋转自由度集中在升降摆臂的头部,可以像机械臂一样进行末端定位角度的调节。该设备直线运动的行程可通过导轨丝杠长度的设计进行调整,可实现x向0~400 mm、y向±150 mm、z向 0~1600 mm 范围内的行程调节;旋转运动方面可实现绕y轴0~90°的转动调节,绕x轴和z轴±5°的偏摆调节,能够满足现阶段所有卫星侧板安装过程中的行程和调姿要求。

图1 全向可调卫星侧板安装设备结构示意Fig. 1 Structure of omnidirectional adjustable satellite side panel installation equipment
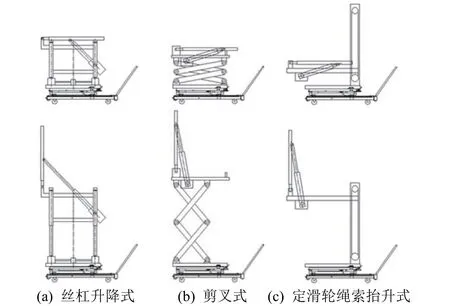
图2 常用卫星侧板安装设备Fig. 2 Sketch of common side panel installation equipment
为更好地适应总装总测厂房环境,节省投资和占地空间,设备设计分为重型和轻型2种型号,重型可承载350 kg,升降行程1.6 m,用于安装大尺寸、大质量的卫星侧板;轻型可承载200 kg,升降行程1.3 m,用于安装一般尺寸和质量的卫星侧板,实现了高低搭配、物尽其用。
1.2 双段式升降机构设计
为了用紧凑的结构获得大幅度的升降行程,该设备在设计上使用了双段式的升降机构,第1级为平行四边形摇臂式升降机构,第2级为丝杠升降机抬升式升降机构。
第1级升降设计的原理如图3所示,电动推杆作为平行四边形机构的斜边,通过伸缩可以控制平行四边形机构活动端相对于固定端的旋转角度来调节活动端的高度[5]。
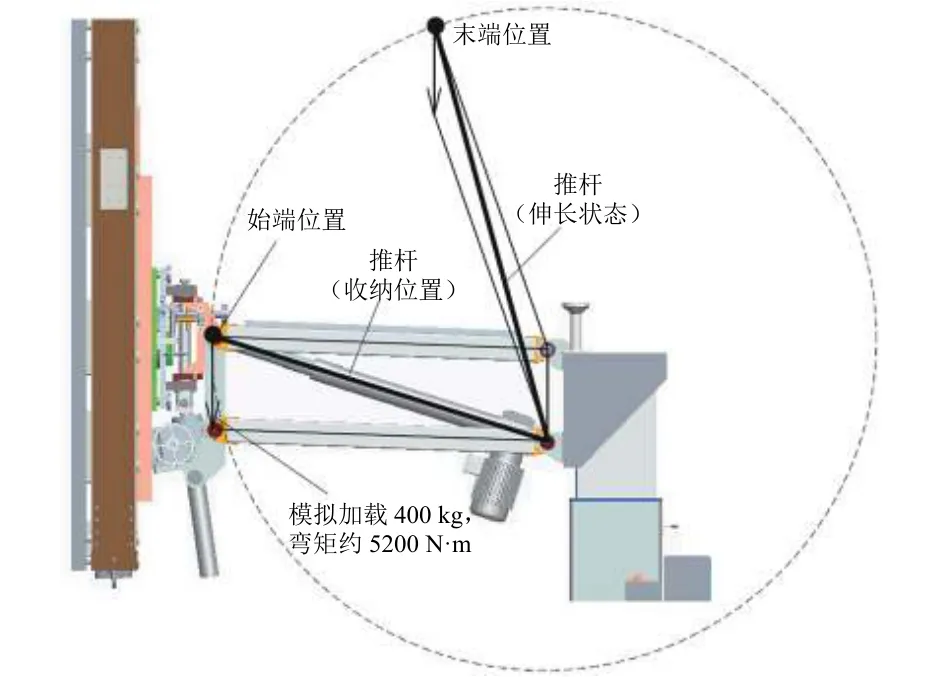
图3 初级升降机构原理示意Fig. 3 Principle of primary lifting mechanism
第2级升降机构(原理如图4所示)分为外框和内框,内、外框之间的导向使用直线导轨组合,两边对称布置,每边2组,每组为2对导轨滑块。其中一对安装在内框上,另一对安装在外框上。内、外框之间的相对运动使用丝杠升降机驱动,升降机提供动力,直线导轨提供导向。内框的下缘和外框的上缘均安装有滑块,使机构在最低位置具有最大的抗弯矩能力,内、外框之间的靠肩结构可在最高位置帮助导向机构承受部分弯矩。

图4 次级升降机构原理图Fig. 4 Principle of secondary lifting mechanism
1.3 末端姿态调节机构设计
末端姿态调节机构包括绕y轴的90°翻转和绕x轴和z轴的小角度偏转。其中绕y轴的90°翻转不仅用于侧板的翻竖直,亦用于侧板位置的微调。如图5所示,该机构为边长可变的三角形结构,其3条边中的1条为固定边,1条为旋转边,1条为驱动边。其中驱动边为两端铰接的丝杠升降机,其边长可伸缩变化;固定边为平行四边形升降机构的一部分,是升降机构的最终活动端;旋转边所在的结构上安装着侧板,用于带动侧板进行翻转。
在实际工作中,侧板与卫星安装面之间存在角度偏差和左右方向的楔形间隙,而绕x轴和z轴的小角度偏转机构用于消除上述间隙,其结构形式如图6所示。绕z轴偏转机构为2个C字形的零件,上下缘通过销轴串接使2个零件能够相对转动。绕x轴偏转机构安装在外侧的C形零件上,其中的侧板安装框转接板嵌入C形零件的竖直壁部分,并通过一套螺杆机构使其与C形零件发生相对转动,最终实现侧板的转动。由此结构提供不大于±5°的偏摆即可满足侧板安装位置的微调要求。
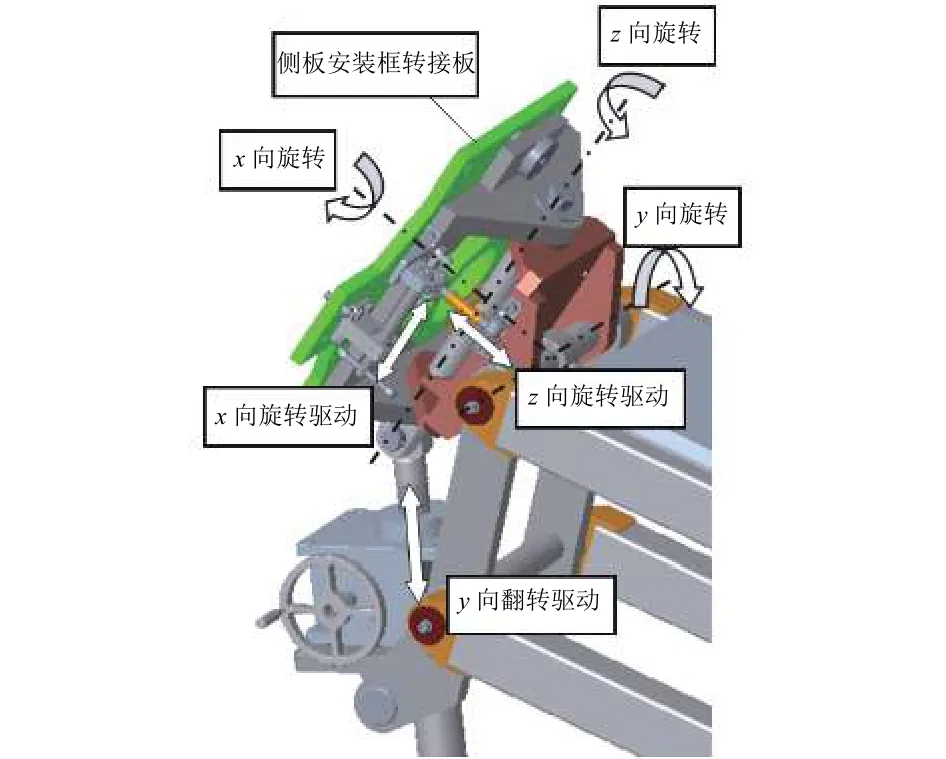
图6 侧板姿态调节原理图Fig. 6 Principle of attitude adjusting mechanism
2 使用方式与性能分析
2.1 使用方式
该设备的使用方式见图7:在状态①下将卫星侧板安装在姿态调节器的对接接口上,使用螺钉进行锁紧并测量侧板与设备之间的绝缘电阻,在满足要求后通过摇y轴翻转驱动手轮将侧板进行翻转,从水平状态翻至垂直状态,即进入状态③;启动设备的摆杆电机完成z向的初段升降,得到状态④,再使用设备的升降电机完成z向的后段升降,在该过程中,激光照准器用于较远距离的对位,以检测侧板与卫星孔位的对正性。当侧板贴近安装位置后,如果(难免)存在一定的偏移、偏转或间隙,可以通过调整姿态调节机构的3个转动自由度来获得一个合适的侧板姿态。现场操作时,在将侧板装上卫星之前,需要进行多次试装,重复进行侧板与安装位置之间靠近与远离的移动操作,该功能通过集成在底座上的x向直线运动机构来实现。

图7 侧板安装设备使用流程Fig. 7 Operation process of side panel installation equipment
2.2 性能分析
1)通用性
目前卫星均已实现平台化,同一平台的卫星具有相类似的结构和尺寸,故对安装其侧板所需的设备都提出了通用性的要求。设备的通用性主要体现在以下几方面:
① 满足尺寸搭配与承载能力要求。侧板尺寸和质量在大多数情况下与卫星平台类别有关,如某平台型号卫星的北上侧板尺寸达2800 mm×1800 mm,质量达200 kg;而有些平台型号卫星侧板尺寸为1200 mm×800 mm,质量约100 kg;还有些平台型号卫星的侧板尺寸为 900 mm×500 mm,质量在30~50 kg之间,有时不需要工装也能进行安装。
② 具有通用性安装功能。每一块侧板均有其独特的安装接口和安装高度,且质心和几何中心有时并不在同一位置,甚至两者之间偏离较远;另一方面,设备的升降行程一般都小于1.5 m,在安装高位侧板时需要使用辅助升降平台。故常用设备一般只服务于某一平台或者某一型号。
③ 安装过程中侧板不能与其他结构发生干涉。由于设计上的局限性,在安装某些长窄型侧板时,升降机构与侧板在空间上不能进行有效的隔离,可能会发生结构干涉。
本设备由于使用了摇臂式升降机构,侧板安装在摇臂的远端,使得侧板在其转动范围内不会与设备自身的其他结构发生干涉,从而能够安装各种长宽比的卫星侧板,与常用设备对比如图8所示。双段式升降机构使其升降行程超过1.5 m,侧板的安装高度超过2.2 m,满足了现有平台卫星所有侧板的安装需求,并且向下兼容。此外,还引入了侧板安装框和转接板,其中转接板固定在设备上,具有标准接口,侧板安装框介于侧板和转接板之间充当媒介,如此,通过配置不同的侧板安装框,便可将不同的侧板安装在同一台设备上,实现其更好的通用性。全向可调侧板安装设备实物见图9。
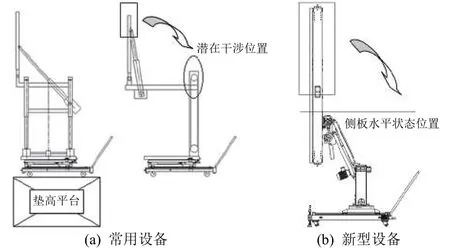
图8 常用设备与新型设备性能对比Fig. 8 Comparison between traditional equipments and the new equipment

图9 全向可调侧板安装设备实物图Fig. 9 Photo of the omnidirectional adjustable satellite side panel installation equipment
2)便利性
早期的卫星尺寸较小,可以通过人工手摇驱动侧板安装设备进行侧板的升降作业。随着大型卫星的出现,大尺寸、大质量、高安装高度的侧板安装已经无法再使用人力驱动方式进行抬升,而行车辅助的抬升方式又因为无法有效控制侧板在空中的姿态而无法普遍应用。而且,侧板在安装前需要通过操作侧板安装设备上相应的机构来实现姿态调节以及侧板与安装框架之间的对准,常用侧板安装设备的侧板姿态调节机构一般分散设计在设备的不同部位,存在动线较长、操作不便的问题。全向可调侧板安装设备使用了电机驱动的升降机构,通过合适的电控设计,将整个升降时间控制在1~2 min之间,且启/停平稳,不会对侧板造成较大的振动或冲击;该设备姿态调节机构设置在设备末端与侧板连接处,3个转动自由度调节功能集成在1个机构内,在操作上更节省时间。由于调节机构与侧板距离很近,机构上需要输入的调节行程与侧板的移动行程大致为1 ∶ 1的转换关系,提高了调节效率;侧板的质心设置在旋转铰链点附近,驱动力矩小,使得侧板的旋转更为省力。
3)可扩展性
在整星电测试过程中,需要对侧板进行开舱散热和线路检查,故在整星电测试前要将侧板与安装框架进行分离,保持一定的距离或者角度。对于水平开舱操作,使用该设备的x向400 mm移动行程的移动机构,一次就能够完成操作活动,而不需要再次移动设备。这使得之后的合舱操作也可以将侧板再次装回原先的位置,而不再对其姿态进行调整,节省了操作时间。对于翻转开舱操作,需要配合使用x向移动机构和绕y轴翻转机构,而翻转轴线与侧板中心的相对位置则通过定制的侧板安装框来进行调整,以达到预定的翻转后的状态。
3 结束语
该新型侧板安装设备已完成制造并投入卫星的总装工作,应用中获得以下几方面的成效:
1)比较传统侧板安装设备,该设备解决了大质量、高升限卫星侧板难以安装和测试的困难。
2)解决了侧板抬升过程中人力驱动费时、费力的问题,抬升时间从之前的7~10 min缩短至2 min以内,提高了劳动效率。
3)使得侧板姿态调节更加便利,大幅缩短了侧板安装和整星测试的操作时间,整体劳动生产率提高了近1倍。
4)提高了总装工艺装备的科技含量,为整个AIT过程提供了环境可靠性保障。
