基于不对称带宽的路径信号协调控制模型
2018-10-17高傲翔谢祥俊
姚 佼,高傲翔,王 飞,谢 明,谢祥俊
YAO Jiao1,GAO Aoxiang1,WANG Fei1,XIE Ming2,XIE Xiangjun2
(1.上海理工大学 管理学院,上海 200093;2.江苏高科物流科技股份有限公司,江苏 南通 226156)
(1.Management School,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Jiangsu Gaoko Logistics Technology Co.,Ltd,Nantong 226156,China)
0 引言
城市道路交通通勤OD中出行者的路径并非直线型的干线线路,实际中存在大量的转向、掉头等非直线型路径,相关的研究表明,交叉口的转向车流占50%以上[1]。另一方面现状的城市道路协调控制研究主要集中在城市道路干线协调控制,其控制的目标主要分为绿波带宽最大化和干线总延误时间最小两类。基于延误时间的模型由于其复杂性和高度非线性,通常很难求解[2];高峰时期,最大化通过能力成为城市道路交叉口信号协调控制的主要目标,此时绿波带宽最大化的模型具有较好的实用性,对于城市交通效率和通行能力的提升效果显著。
对于传统的干线信号协调控制,国内外专家学者对此进行了深入的研究。Little等人首先提出最大带宽混合整数线性规划MAXBAND模型[3];Gartner等人提出一种多带宽干线协调控制模型MULTIBAND模型,该方法在MAXBAND模型的基础上改进,它可以根据上下行交通量不同给出多种协调绿波带宽,与MAXBAND模型相比较该模型更符合实际道路条件[4];此后,其提出了改进的MULTIBAND-96,使它适合网络协调控制的需要,并且算法可以在很大程度上优化模型的求解时间[5]。卢守峰等人在基本MAXBAND模型中加入了交通流离散Robertson模型的约束条件,解决了交通流离散造成的MAXBAND模型的局限性[6]。陈宁宁等人在传统MAXBAND模型中引入动态红灯排队消散时间模型约束条件,建立了改进的MAXBAND模型,改进的MAXBAND模型与原模型相比较,实际有效绿波带宽增加31.6%,车流主要行驶方向车辆平均延误减少12.6%[7]。
虽然MULTIBAND模型比MAXBAND模型加入了交通流量和绿波速度等约束条件,更适合城市道路信号协调控制的要求,但由于MULTIBAND模型的绿波带宽严格按照带宽中心线对称,这样就会造成绿波带宽的求解范围小等问题。针对这一问题,张超和Gartner等人提出AM-Band模型的概念,通过对绿波带宽对称系数的改变,建立了一种不对称多波段(AM-Band)模型,可以更好地利用每个方向上可用的绿灯时间,在AM-Band模型中,每个前进方向的绿波带并不一定是关于中心对称[2]。唐克双等人提出一种非对称绿波的概念,对基本MULTIBAND模型进行改进。绿波带宽不一定是相对于绿波带中心是对称的,这样的改进使干道绿波带宽产生了不同的不对称宽度,与多带宽模型相比该模型提供了额外的灵活性,可以更好地利用每个前进方向的可用绿灯时间[8-9]。
综上所述,现状的大多绿波协调控制模型都是针对干线信号协调控制进行研究,这些模型对于非直线路径适用度不高。本研究考虑如何将经典的城市干线协调控制模型进行改进,适应路径协调控制的要求,满足城市通勤交通的需求。为了使绿波协调模型适用于非直线的路径,需要对现有的绿波控制模型的目标函数和不等式约束条件进行改进和修正。本研究中,基于经典的可变带宽MULTIBAND绿波协调模型,目标函数方面加入了通行能力折减系数的影响考虑;对于约束条件,引入不对称带宽的概念对于带宽约束条件进行改进,加入交通流离散模型对于绿波速度约束条件进行改进,进而建立了面向路径的不对称带宽协调控制模型。
1 城市道路交通路径特点分析
城市道路交叉口具有转向、连接的功能,其中交叉口的转向功能对于城市路径的通过能力至关重要。交叉口转向一般分为左转、右转和调头三种形式。由这三种形式组成四种基本路径类型:Z字型路径、反Z字型路径、U字型路径和倒U字型路径。经过右转—直行—左转的路径因为形似大写的英文字母Z,故定义为Z字型路径。反Z字型路径,与Z字型路径相似,只不过其转向顺序为左转—直行—右转。此外,转向顺序为左转—直行—左转的路径因形似大写的英文字母U,故定义为U字型路径,同理,经过右转—直行—右转的路径定义为倒U字型路径。在城市通勤交通中,车辆行驶的路径往往是这四种路径基本形式与直线型路径的组合形式。
非直线型路径信号协调控制与直线型路径信号协调控制相比,有如下特点:(1)非直线型路径由于要经过交叉口转向,通过能力较直线型路径有所降低,所以在同等交通流量的情况下,车辆通过时间变长,行驶速度降低,进行信号协调时的所需带宽要较宽。(2)交通流在经过非直线路径时的车队离散度较直线型路径更大,由于受交叉口转向的影响,车辆行驶速度的变化范围更大,车队的稳定性更低。
由于非直线型路径信号协调控制具有以上两个特点,本文基于经典的MULTIBAND不对称带宽协调控制模型,充分考虑上述路径信号协调的特点,加入了路径离散模型对于绿波速度进行约束,同时在目标函数中亦加入了通行能力折减的影响。
2 面向路径信号协调的MULTIBAND改进模型
2.1 不对称带宽的MULTIBAND改进模型
由于传统的MULTIBAND模型的绿波带严格按照绿波带中心线对称,这样就会造成绿波带的带宽求解范围小和绿波带运行不稳定等问题。对于路径信号协调由于转向带宽与直行带宽不同,传统的MULTIBAND模型关于绿波带中心对称就不合适。本文中一种不对称带宽的MULTIBAND改进模型。这个改进模型放宽了对于MULTIBAND模型关于绿波带中心对称的要求。
2.2 加入交通离散模型的改进MULTIBAND模型
在实际的交通状况中,所有的车辆都假定它们的速度相同,并且在道路上没有明显变化。由于车辆性能和种类的不同,就会造成交通流的离散现象。这里用一种典型的交通流离散方法Robertson[10]方法。Robertson方法假设速度频率变化符合几何分布,模型如下:

式中:T是车辆行程时间(s);λ是车辆行驶在路段之间平均行驶时间的80%;a是车队离散系数;g(T)是时间概率密度分布函数。

图1 不对称带宽MULTIBAND模型时距图
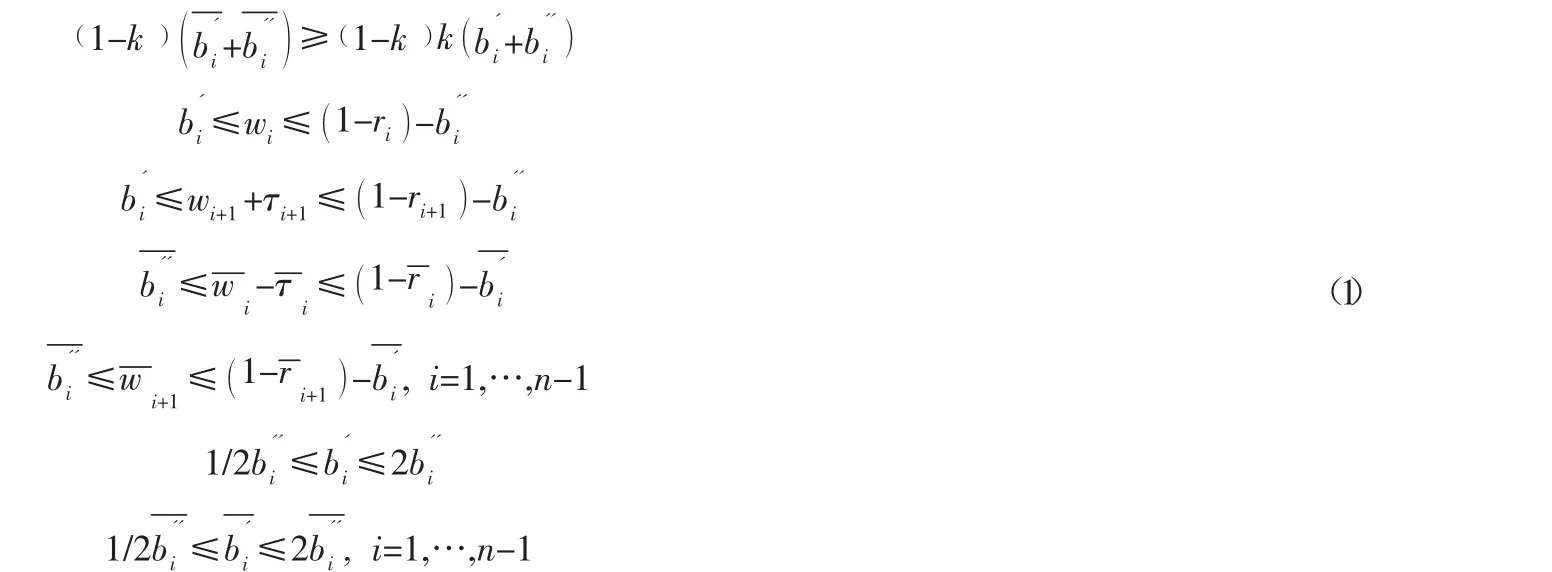
在城市路径中由于受到左转、右转的影响,城市路径的离散程度与传统的干线协调离散程度不同,本文加入离散模型的约束条件对于MULTIBAND模型进行改进。由于基本的MULTIBAND模型有约束条件:

式中:di为相邻交叉口之间的距离(m);fi为交叉口上行方向车速的最小值(m·s-1);ei为交叉口上行方向车速的最大值(m·s-1)。
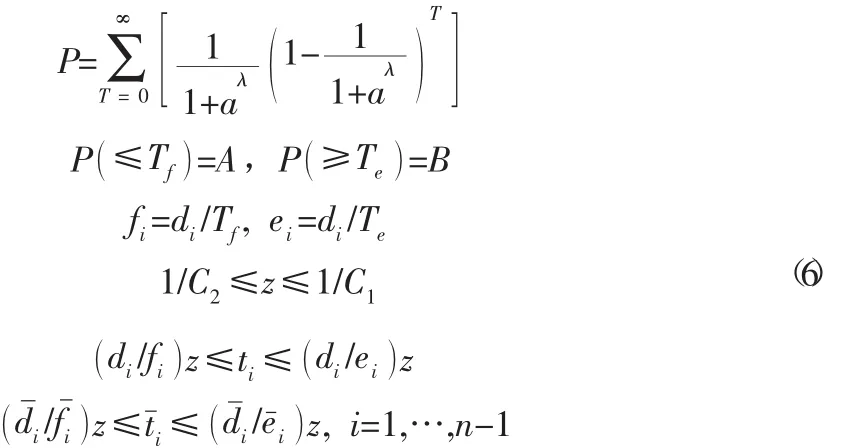
其中:fi和ei可以用计算公式:

式中:Tf是相邻交叉口行程时间的最大值(s);Te是相邻交叉口之间行程时间的最小值(s)。
Tf和Te的具体值可以通过上面Robertson离散模型的公式[11]得到:

如图2所示,例如选取97%的车流集中度,那么在公式中得到PP车流集中度的取值可以根据情况而定,可以根据高峰和平峰不同的交通情况对于车流集中度P进行取值,从而得到A和B不同的值对于模型进行约束。
根据以上的约束条件,加入交通流离散模型得到绿波速度的约束条件为:
2.3 加入通行能力折减系数的改进MULTIBAND模型
2.3.1 三种通行能力模型

图2 车流集中度时间—概率密度图
(1)直行通行能力模型
直行车道饱和车头时距可以利用平尾均值的方法得到。平尾均值也是总体均值的一种估计[12]。平尾均值就是将一列升序排列的数值,规定一个平尾的百分比,将异常的数值削减到与中间正常数值的平均值相等,将异常数值限制到一定的程度,最后将中间各样本数值与首尾异常值的样本平均值一起进行算数平均。对于直行车道的饱和车头时距主要采用调查统计的方法得到。将直行开始放行的前5辆车予以剔除,并用平尾均值法处理数据得直行饱和车头时距h为:

式中:h为饱和车头时距平均值(s);n为统计的车辆样本量;hi为样本量按照升序排列的饱和车头时距 (s);α为平尾百分比。
通过上述公式可以得到直行饱和车头时距进而得到直行通行能力模型:

式中:h为直行饱和车头时距 (s);gi为直行相位的绿灯时间 (s);T为交叉口周期时长 (s)。
(2)左转通行能力模型
根据城市道路的具体情况,可以把交叉口左转通行能力模型分为以下三种。
①拓宽专用左转车道通行能力模型
左转平均饱和车头时距也可以通过平尾均值法进行计算。通过上述公式(7)可以得到左转饱和车头时距平均值,进而可以得到左转专用车道的通行能力模型[13]为:

式中:CL1为左转专用车道通行能力(pcu·h-1);tg为左转绿灯时间(s);vL为左转车流的速度(m·s-1);a为平均启动加速度(m·s-2);T为信号周期时长(s);hz为左转平均饱和车头时距(s)。
②设有左转待行区的左转车道通行能力模型
设有左转待行区的左转车道通行能力模型[13]为:

式中:C为左转车道的通行能力(pcu·h-)1;T为信号周期时长(s);n为一个信号周期内左转待行区内原有的车辆数;t
L2p
为左转绿灯时间与黄灯时间之和(s);ts为左转车辆的启动时间(s);为左转车辆驾驶员的反应时间(s);th为左转饱和车头时距均值(s)。
③允许掉头的左转车道通行能力模型
允许掉头的左转车道通行能力模型[14]为:

式中:hm为混合车流的平均车头时距(s);hL为左转车流的平均车头时距(s);hU为掉头车流的平均车头时距(s);PL为左转车流的比例;PU为掉头车流的比例;tgi为有效绿灯时间(s);T为信号周期时长(s);CL3为允许掉头的左转车道通行能力(pcu·h-1)。
(3)右转通行能力模型
右转交通要考虑行人和非机动车对于右转交通的影响,由于中国人过马路喜欢组队一起通行,可以把行人和非机动车队伍看成人群和非机动车群用可穿插间隙理论计算受影响时右转交通的通行能力[15]。得到交叉口右转通行能力的模型为:

式中:ht为右转车辆车头时距(s);tgx为每周期内的右转车辆不受行人和非机动车影响的时间(s);T为信号周期时长(s);Gc为绿灯时间内行人群的数量;tc为右转车辆所能穿越行人群的临界间隙时间(s);tf为右转机动车的随车时距(s);λ为行人群的单位时间数,λ=Gc/3 600;Gb为绿灯时间内非机动车组群的数量;te为右转车辆所能穿越非机动车组群的临界间隙时间(s);η为非机动车组单位时间的到达率。
2.3.2 通行能力折减系数
本文通过增加一个在交叉口转向折减系数对于绿波带宽进行折减,从而体现城市路径的特点。本文用交叉口转向通行能力(包括左转与右转)与交叉口直行通行能力的比值定义折减系数。由于城市交叉口情况复杂,对于不同的交叉口情况要利用不同的折减系数进行折减,不同的城市行驶路径折减系数也不同。本文结合上面的交叉口转向通行能力模型对于折减系数βj进行分类折减,具体折减公式如下所示:

式中:βj为交叉口转向折减系数;Cz为交叉口转向通行能力(pcu·h-1)(包括直行左转与右转,具体根据路径情况而定);C为交叉口直行基本通行能力(pcu·h-1);β1为直行时的折减系数;β2为拓宽专用左转车道时的折减系数;β3为设有左转待行区的左转车道时的折减系数;β4为允许掉头的左转车道时的折减系数;β5为右转时的折减系数。式中其它符号的含义同2.3.1节。
由于通行能力的折减系数都是小于等于100%,通行能力的折减系数与绿波带宽应成反比的关系,根据这个关系,对于改进MULTIBAND模型的目标函数进行更改,重新得到的目标函数为:

2.4 改进后的MULTIBAND模型
通过以上三种方法对于基本MULTIBAND模型目标函数以及约束条件进行改进,得到了面向路径信号协调的新模型为:

3 案例仿真与分析
以江苏省常州市天宁区晋陵中路—关河中路—和平北路组成的Z字型路径为例,对上述模型进行仿真验证,该路径包括飞龙东路—晋陵中路、晋陵中路—关河中路、关河中路—永宁路、关河中路—和平北路、和平北路—博爱路5个交叉口,该路径是连接聚博花园等居民小区和江苏省常州高级中学等学校的一条主要路径,高峰时刻上下学的通勤OD交通需求较大。
根据调查流量和饱和流率等情况,本文首先利用Webster法[16]对于各交叉口单独进行信号配时,求得周期最大的交叉口为关河中路—和平北路交叉口,周期为140s,进而将其作为信号协调控制的关键交叉口,其他交叉口周期也相应的调整至140s。
利用混合整数规划求解软件LINGO对2.4节的模型进行求解,周期约束本文取130~150s,速度约束取28.8~43.2km/h,相邻交叉口路段间的速度变化范围是7.2km/h,排队消散时间参数τi,这里设为10s[7]。根据以上约束条件,求解出bi、wi、ti等参数,进而计算出相邻交叉口间相位差[8]。
根据调查数据在交通仿真软件VISSIM中建立仿真路网,根据上述相位差生成协调控制方案,通过仿真运行结果对路径控制效果进行整体评价分析。将本文模型与Synchro软件仿真结果,及MULTIBAND模型的结果进行对比,如表1所示。从中可以看出,相对与Synchro优化模型结果,本研究的模型在整条路径上延误时间和停车次数分别减少了9.2%和19.3%,路径上车辆的平均行驶速度增加了17.2%,整条路径的每小时通过能力增加了14.4%;相对于MULTIBAND模型优化结果,本研究的模型在整条路径上延误时间和停车次数分别减少了3.9%和9.7%,路径上车辆的平均行驶速度增加了7.5%,整条路径的每小时通过能力增加了8.1%。

表1 各协调控制方案的路径仿真评价对比
4 结束语
通过加入路径通行能力折减系数对于传统MULTIBAND模型的目标函数进行改进,体现路径信号协调的特点,进而引入不对称带宽的概念对于带宽约束条件进行改进,在此基础上加入交通流离散模型的考虑,对于路径绿波速度约束条件进行改进,建立了面向路径的不对称带宽协调控制模型。相关的案例分析显示,与传统Synchro模型相比,在延误、停车次数、路径通过能力等方面的改善在10%~20%之间,效果显著;与经典的MULTIBAND模型相比,在停车次数、路径通过能力等关键指标上,亦有接近10%的改善,表明该模型更加适合路径协调的需求。
本研究提出的模型中虽然存在排队消散时间参数τi,但是τi需事先给定,对其能否保证与模型计算的结果保持一致,是不是符合实际协调的情况,需要进一步深入研究。此外,研究的案例为基本Z字型路径,模型对于其它基本路径模型适用性实际验证,有待进一步研究。