Dynamic Property and Motion Simulation of Atmospheric Diving Suit
2018-10-12
(School of Naval Architecture,Ocean&Civil Engineering,Jiangsu University of Science and Technology,Zhangjiang 215600,China)
Abstract:Atmospheric diving suit(ADS)is driven by manpower and propeller.The pitch and roll restoring moments should be adjusted to be suitable for man driven.In this paper,kinematics model of ADS is established by introducing a well arranged restoring force and hydrodynamic force.The added mass of ADS is modeled by Hess-Smith method according to posture.General activities such as slow rotation,walk,hands rising are simulated.Results indicate a good performance of the underwater operation and control of ADS.
Key words:added mass;kinematics model;restore force;posture simulation
0 Introduction
Atmospheric Diving Suit(ADS)is a small one-person suit which is slowly articulated submersible and anthropomorphic as shown in Fig.1.It is a suit to resist hydro pressure in deep dives up to 500 m or more.Articulation relays on elaborate pressure joints.Slow motion of joints changes hydrodynamic damping.Suit also needs to carry life support system,observation system,communication,propulsion,emergency equipment,power,and so on.An emergency buoyancy design assured ADS floating upward.The adjusting load is used for the diving man to gain the condition of the balance between gravity and buoyancy.
The hydrodynamic design assists the manipulation of slow navigation,because performance specifications of the atmospheric diving suit are often split up into categories,which are appropriate to types of underwater activities.The kinematics and dynamics which are involved in controlling and modeling ADS is given as six-degree-of-freedom model similar to Chin[1].This feasible and functional dynamical model is presented in this paper.The model deals with the geometric relationships that govern the system and relationship between control parameters and the performance of a system in state space.A comprehensive and extensive study of underwater vehicle dynamical control is given by Fossen[2].Eng[3]applied efficient system identification which is a statistical method to build hydrodynamic models of dynamical systems from experimental data including damping coefficient matrix.However,experiments have often been carried out to identify the hydrodynamic parameters of vehicles in some degree of freedom(DOF)for implementation in the model-based control algorithm[5-8].
The whole system comprises launching and retrieval system,tether management system and ADS,which help avoid the effects of surface disturbance on suit such as surface wave and current.Ship systems,control console,instrumentation,control and electrical system,operational system are connected by transmitting umbilical cable on the head of the suit.
This study combines the variable appearances of the diving suit,movements of multiple degree of freedom,movement stability and other special requirements.
The dynamical model of ADS is built based on Chin’s model[1]in this paper.Moment of inertia and hydrodynamic property of ADS depend on its posture.The transition matrix of mass property is given by posture change prediction algorithm.The performance of the design is evaluated by this model.

Fig.1 Configuration of an atmospheric diving suit
1 Dynamic modeling
An extensively used kinematics model[1]describing the motion of AUV is introduced.The underwater performance of ADS depends on its hydrodynamic property.Hydrodynamic coefficients in the governing equations are given by calculations.The gesture of ADS algorithm is developed for predicting the moving mass of the suit to calculate the moment of inertia and position of mass centroid.Expression of the kinetic model is shown as follows:

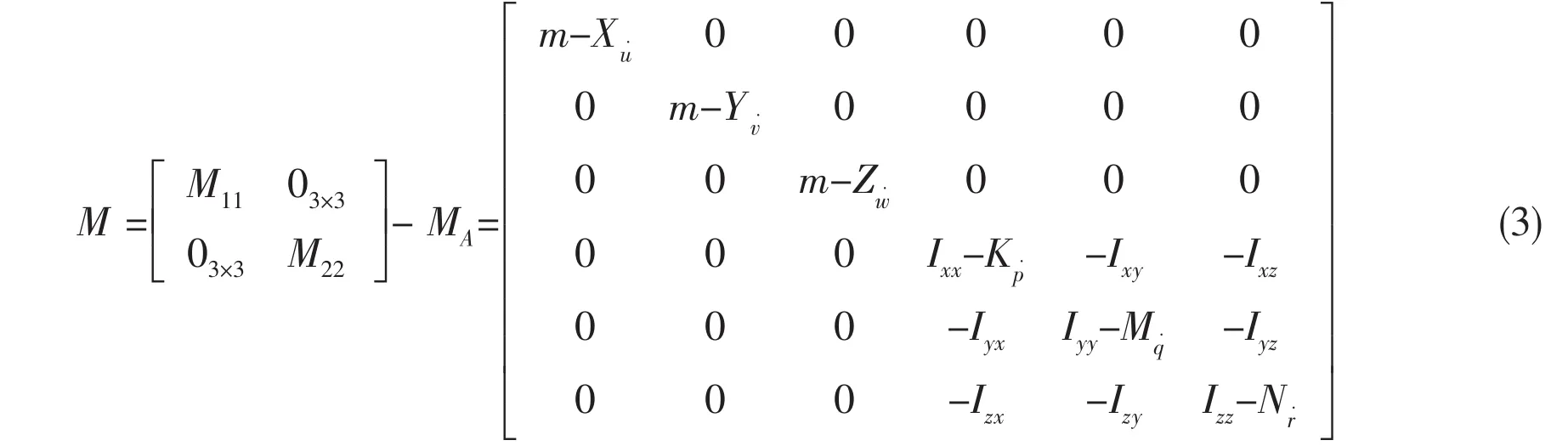
where M is the sum of the mass inertia matrix MRand the additional mass matrix MA,C includes Coriolis force and centripetal force,and D is the hydrodynamic moment(diagonal matrix),ignoring the effect of flexible umbilical cable torque.The above coefficient matrices M,C,D are 6×6 matrix.g is the restoring torque formed by gravity and buoyancy.The τ is the resultant moment of all controlled moments,for the diving suit,including two propellers at the waist and the human activities.is the linear velocity and v2is the angular velocity.is the position and attitude angle of the suit.
The kinematics equations are named.Euler transformation matrix of the body axis and the inertial system are expressed as:

where J1,J2are
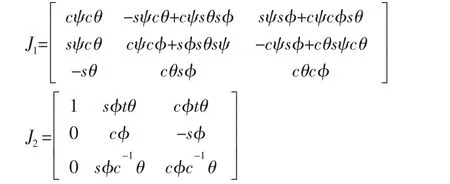
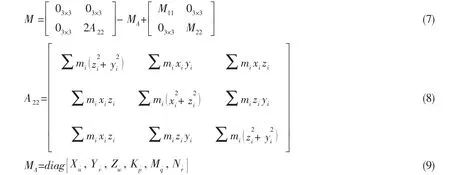
In the above equations,c represents cos,and s represents sin.In order to simplify the calculation model,the origin of the inertial system is set at the geometric center of the relay station,while the origin of the body axis system is established at the center of gravity of the equipment(XG=YG=ZG=0).The first 3×3 sub-block of MRbecomes a diagonal matrix,and the fourth 3×3 sub-block is a non-diagonal elements Ixy,and Ixzand Iyzbecome smaller in relation to the diagonal element so as to reduce the singularity of the matrix.The additional mass matrix is a diagonal matrix,which is solved by the Hess-Smith method.Due to the low-speed movement of the suit under the water,the effect of hydrodynamic coupling is small,so it is not considered in the dynamic model,that is,the non-diagonal elements of the additional mass matrix are zero.The above-described simplification of the mass matrix has sufficient accuracy for an underwater moving speed of less than 0.5 m/s.The quality matrix is expressed as follows:
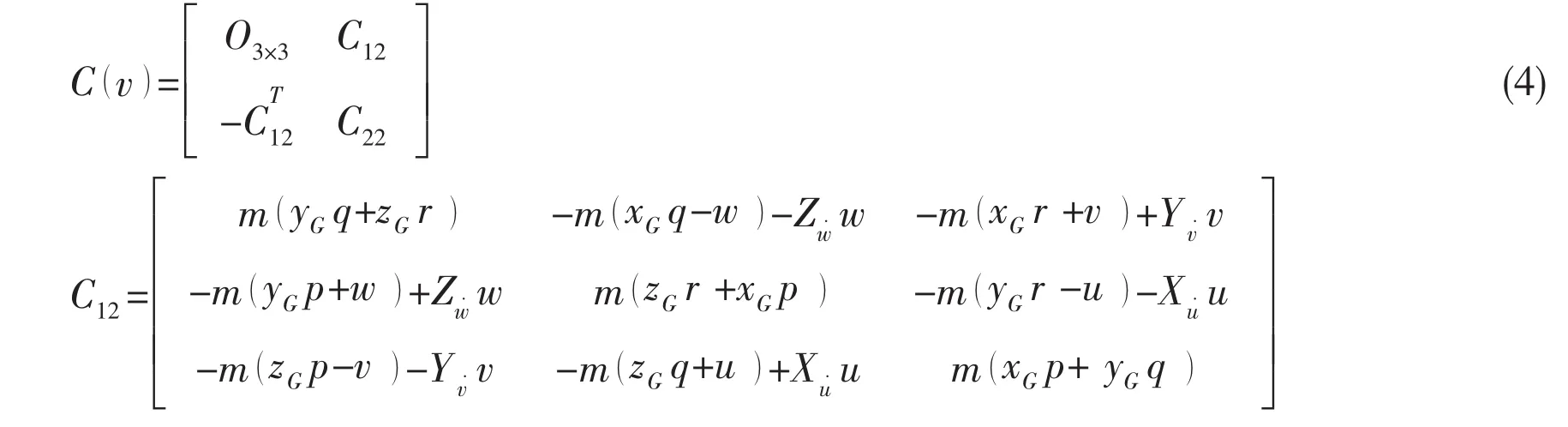
C(v)includes Coriolis force and centripetal force,which are the rotation effect of mass and additional mass to the body-fixed coordinate.The C(v)expression is:

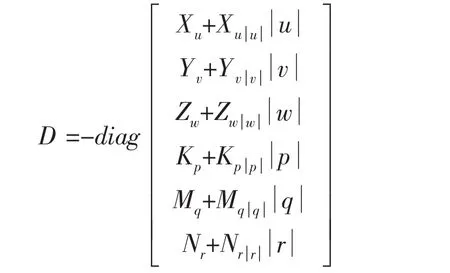
D is the hydrodynamic damping force matrix.For the non-streamlined diving suit,the causes of hydrodynamic forces include surface friction,unsteady forces resulting from vortex shedding,and so on.In fact,as the speed of navigation changes,the hydrodynamic forces of the diving suit will show a strong nonlinearity,and the effect of the coupling effect is remarkable,especially the effect of the torque and the increase of the speed of the diving suit will high lighten the nonlinearity and the coupling effect.For hydrodynamic forces in the low speed range,the hydrodynamic force of the diving suit can be approximated by a quadratic function as follows:
In the body-fixed coordinate system,the expression of restoring force vector g()ηis:
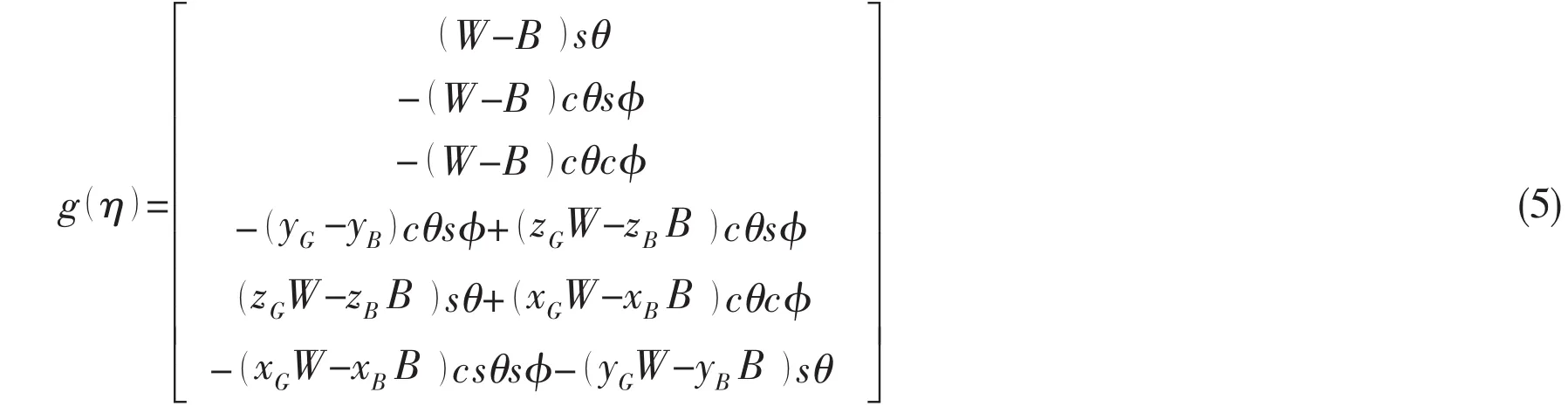
As the XG=YG=ZG=0 in the body-fixed coordinate system,the above formula can be further simplified.u1,u2are defined as the horizontal propeller symmetrical arrangement in the waist of the suit,and u3,u4as the vertical propeller.The propulsion and moment of the four thrusters of the suit can be expressed as:

where u is the thrust vector of the four propellers driven by the electric signal,the effective thrust for the propeller.l2is the vertical distance between the horizontally propeller arranged symmetrically and the origin of the body-fixed coordinate system.l3is the distance between the horizontal propeller and the symmetry plane of the suit.
It is worth noting that the propeller can not control the lateral movement on roll degrees of freedom,because small rolling damping force of this humanoid suit can be easily adjusted by horizontal propeller.Therefore,the suit overcomes the impact of lateral flow.
2 Movements of the suit
According to configuration and motion characteristics of the suit,the simulation model of the diving suit is established,and the related coefficient determination and calculation of the model are given.The kinetic numerical model is used to simulate the movement of the suit under typical ocean currents.
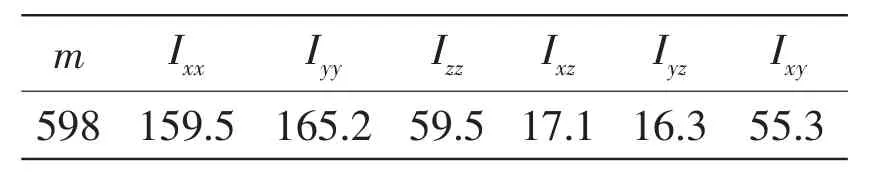
Tab.1 Mass property of ADS
According to the dynamic model,the origin of the body-fixed coordinate system is established at the center of gravity.Through the virtual assembly of the computer,the quality attribute of the suit is calculated.Tab.1 includes the quality of the suit and the moment of inertia.
The additional mass damping of the upright walking posture of the suit is solved by Hess-Smith method.The CAD model of the completed assembly is simplified and the small size components of the suit,such as antenna,fixture and lamps,are removed.Then the surface elements are laid out on the CAD model.The additional mass damping is calculated as shown in Tab.2.

Tab.2 Added mass of straight standing ADS
By optimizing the layout of the buoyancy materials and loading equipment,we calculate the center of gravity,weight,buoyancy,and the centre of buoyancy,and as a result we get the suit’s standard underwater net buoyancy is 5 kg.Based on the different underwater tasks and current environment,the weight can also be adjusted so that the underwater weight is slightly larger than the buoyancy,thus enhancing the movement stability of the suit.In addition,because the limbs’movements of the submerged member form a movable weight-restoring force vector that is variable within a small range,the movable weight caused by the underwater motion of the submerged member and as a result the variation of the mass characteristic matrix should be considered in the calculation of the underwater motion.The mass matrix,the additional mass damping and the relationship between the moment of inertia and the attitude of the suit should be established here.According to the low velocity and low amplitude of the motion of the limbs under the water,the high amplitude of motion posture needs to cooperate with the propeller thrust so as to overcome the effect of the righting moment vector,etc.
The relationship between the mass matrix and the posture of underwater activities is as follows:
where miis the movable mass of the suit,is the position of the center of the movable masses in the body axis,and i represents the body-fixed coordinate system at the joint.The position of the center of the movable mass changes with time as the movement of the limbs is provided.Since the degree of freedom of the movable joints of the suit defines the range of motion and the path of motion of the limbs,the space motion trajectory of the body-fixed coordinate system of the center of moving mass in the joint junction isThe origin vectorof the bodyaxis system and the body-fixed coordinate system is converted into the body-axis system by using the coordinate transformation matrix J1of each movable joint.

The configuration of additional mass damping is defined,mainly including large volume buoyancy backpack,torso,helmet,upper limb,lower limb and other major components.The lower limbs can only do a small degree of rotation,and its dynamic effects can be ignored.The relative motion posture of the upper limbs of the suit can divide automatically into the triangular surface elements by employing the efficient Hess-Smith method.The additional mass damping matrix is calculated in real time to facilitate the real-time solution of the dynamic equations.Four sets of body-fixed coordinates are created symmetrically at the shoulder and elbow joints of the upper limbs.In the preliminary design,when the suit does the upright walking posture,the relative positions of the floating center and the center of gravity are set as follows:

The suit has an inclination angle of about 5°in water.When the suit does low-speed movements,the value of the restoring torque is a key factor in deciding the stability of the movement of the suit,the underwater activity ability and the comfort of the personnel as well as the safety of the suit,so the disposable heavy block with adjustable positions is added to the suit.Thereby an adjustable position and a disposable weight are added,so that the righting moment can be adjusted.In the body-axis coordinates,the propeller installation position is l2=0.12 m,l3=0.385 m.
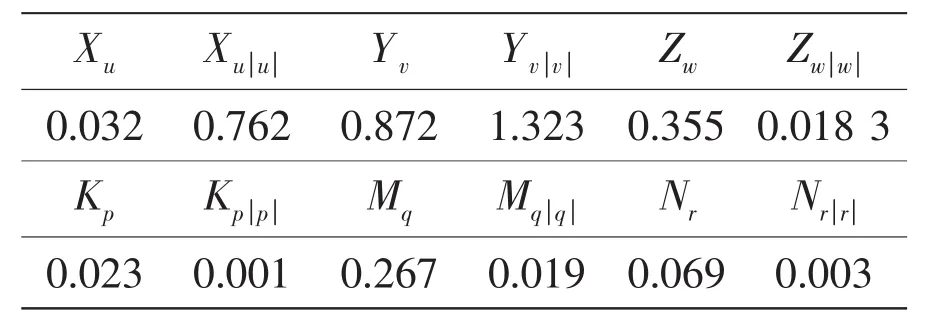
Tab.3 Hydrodynamics of ADS in straight walk
The hydrodynamic coefficient of the suit was measured by the tank test.As the upright running condition of the suit is the most commonly used,an actual dimension tank test model was made with the upright walking attitude.The towing test and maneuverability test were carried out.Through the regression of the test data,the test obtains the relevant hydrodynamic coefficients as shown in Tab.3.The hydrodynamic characteristics of the suits are discussed in Ref.[4].
The hydrodynamic damping coefficient of the underwater motion attitude of the suit has a great influence.In this study,only the upright attitude is tested and the hydrodynamic damping formed by the relative movement of the main parts is estimated.The limbs of the suit are cylindrical and tapered,and the dynamic damping force formed by the motion of the arms in relation to the main body of the suit is calculated by cylindrical hydrodynamic damping.Limbs of the suit are cylindrical and tapered,and the hydrodynamic damping force formed by the motion of the arms in relation to the main body of the suit is calculated using cylindrical hydrodynamic damping.

where

The hydrodynamic coefficient of the component in Djtakes the cylindrical motion damping coefficient in the range of low Reynolds number.The projected area of the relative motion direction of the joint in the body-fixed coordinate was calculated.
Different from the method of evaluating the motion performance and stability of the conventional diving instrument,this study uses the tank test of the bluff body to obtain the hydrodynamic coefficient and the mass and damping characteristics of the suit,which as shown in the above form are then substituted into the dynamic calculation model.The stability of the underwater linear motion,the stability of the navigation direction and the static stability of the suit are calculated and evaluated,and the dynamic stability of the suit is evaluated.The ability to perform the associated underwater operations,such as leaning,flipping and other typical movement is calculated.
3 Dynamic calculation of the typical motion state of the suit
The underwater movements of the suit is under the real-time control of the submerged member.At the design stage of the suit,the controllability of the underwater movements,the conformity of the man-machine engineering requirements and the rationality of the choice of layout parameters design need to be verified.Selecting the existing control and analysis strategy is especially essential to evaluate the design parameters.At the preliminary design stage of the suit,whether the given initial design parameters such as propeller arrangement,restoring torque vector,and space active trajectory are reasonable under the condition of given target speed,sea current and trajectory.The kinematics computational flow chart is shown in Fig.2.
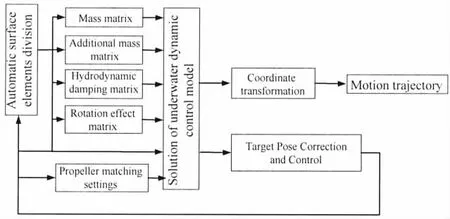
Fig.2 Computational flow chart
The Matlab Simulink toolbox is used to program the control Eq.(1).In the case of the initial position and attitude of a given suit,the system of equations is a first-order differential equation with unknown velocity,and the solution of the governing equations is acquired through the fourth-order Runge-Kutta method.The coefficient matrices and the right-hand items are needed in the solution process.The corresponding solution subroutines are developed for the mass properties matrix,inertial force matrix,hydrodynamic matrix,restoring force matrix,and control force matrix.Two calculation modules are defined as propeller matching and surface elements division.The calculated output includes the trajectory of the center of gravity,attitude angle,velocity and other unknown variables.The corresponding solving module is designed around Eq.(1),and the calculation module of the six-degree-of-freedom model includes:
(1)The calculation of mass attribute matrix
The matrix of mass M1and moment of inertia M2can be obtained according to the overall arrangement of the suit,and the quality attribute matrix can be obtained by using Eq.(7),which includes mass matrix MRand additional mass matrix MA.The mass matrix contains the moving mass,and the moving mass matrix is solved by using Eq.(8).The trajectory of the motion of the limbs of the suit with the time under the local coordinate system of the joint is given by the space motion trajectory curve of the body-fixed coordinate system of the joint junction.The time of the centroid track Eq.(10)is used to obtain the mass and moment of inertia by transforming the coordinate system into the satellite coordinate system,and calculating the mass center of the corresponding time step.The time course of the centroid trajectory is linearly interpolated,the centroid position corresponding to a given time step is calculated,and the mass and moment of inertia are obtained by transforming the coordinate system into the bodyfixed coordinate system by using Eq.(10).
(2)Calculation of additional mass matrix
Eq.(9)includes the required additional mass of solution.The results of the non-diagonal elements in the additional mass matrix calculated by Hess-smith algorithm tend to have large errors due to the bluff body shape.In this study,only the diagonal elements of the additional mass matrix are calculated.After changing the shape of the suit,the modified surface is divided into surface elements.After a further development of the 3D modeling software,when the trajectory of the limbs is given,the assembly posture at a certain time can be determined,the outer surface of the assembly can be derived and the intersecting surface can be trimmed automatically.After the automatic repair,the division of the surface is finished,and the output surface elements division file is substituted into the additional mass calculation module for calculation.
(3)Calculation of hydrodynamic damping matrix
The suit carries on the low-speed movement under the water.Based on the given current resistance and torque coefficient in Tab.3,we calculate the flow damping torque.The influence of the resistance of the water flow caused by the movable member is calculated by using the quadratic function shown in the Eq.(11)and Eq.(12).
(4)Calculation of rotation effect matrix
The mass moment of inertia formed with respect to the mass distribution at the initial center of gravity,the movable mass distance is far from the center of gravity,and the amount of change in the moment of inertia is large.Moment of inertia caused by changes in the center of mass can be calculated using modeling software,then substituted into Eq.(4)for calculating the moment of inertia.
(5)Propulsion control module design and calculation
In this design,it is necessary to reasonably match the thrusts of four propellers arranged at the waist so as to form a reasonable control force and moments for the suit.The thrust matching relationship required by Eq.(6)is calculated.
(6)Solution of restoring moment
The restoring moment requires the weight and buoyancy of the suit,the relative position of the center of gravity and the center of the buoyancy.The restoring moment is calculated accord-ing to Eq.(5)to set the assembly adjustment parameters.The calculation flow of each module is shown in Fig.3.
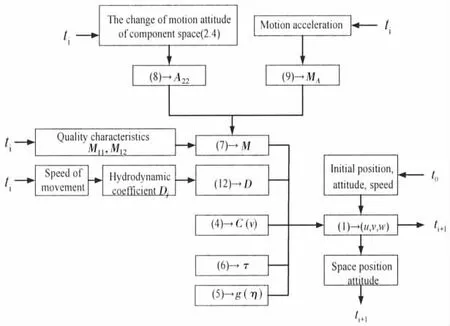
Fig.3 The solution process of the motion model
3.1 Suit with straight line sailing
When the suit moves with the speed of 0.5 knots close to the seabed,the thrust of 17.25 kg was only pushed by two horizontal propellers to achieve the horizontal straight forward movement.By solving the dynamic equations,the changes of the voyage speed and pitching angle with the sailing time were obtained.The dynamic stability of the suit was verified by solving the dynamic equation.
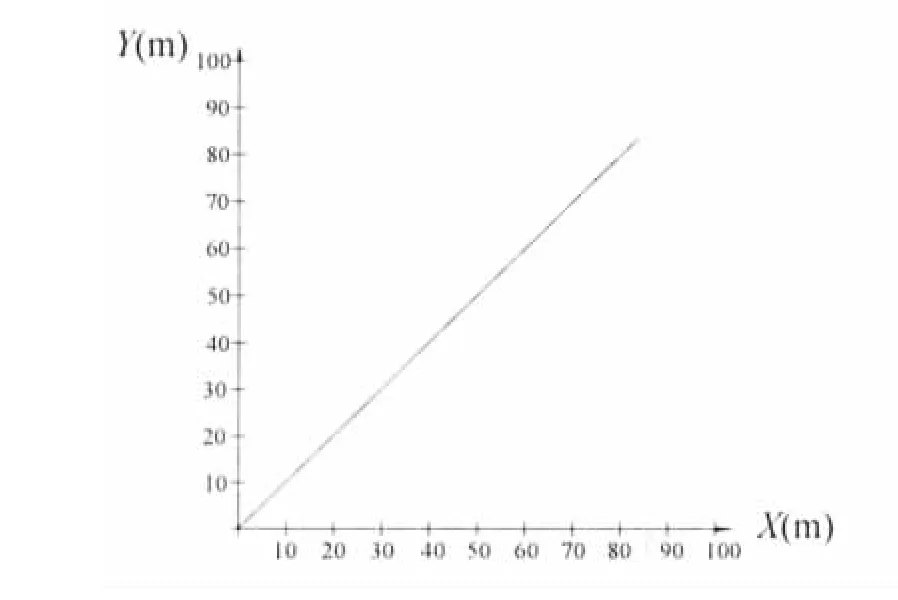
Fig.4 ADS straight line walk trajectory
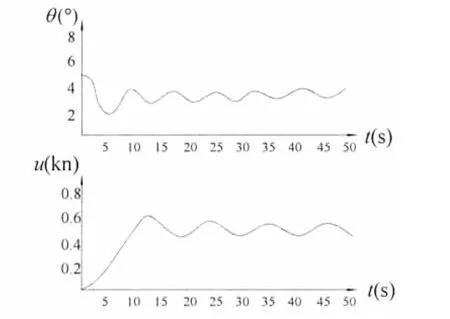
Fig.5 ADS pitch and cruise velocity
3.2 Suit with rotary motion
After the two horizontal thrusters go into a stable straight-line navigation state,we increase the right thrust to 23.5 kg and 25.5 kg and reduce the left thrust to 11 kg and 9 kg.The formation of the voyage is as shown in Fig.6,the corresponding roll angle and rotation angle are as shown in Fig.7.
3.3 Movements of the suit with its arms moving round a circumference
Taking the upright posture as the basic posture,the body-fixed coordinate systems x1y1z1and x2y2z2as the left and right shoulder joint body-fixed coordinate systems,the origin of the body-fixed coordinate system and the body axis of the vector:m,the origin of the body-fixed coordinate system of the left and right shoulder joints is φ01,02=67.5°,the angle between the origin of the body-fixed coordinate system and the body axis y0is θ01,02=13.2°,and the elbow joints move relatively to the shoulder joints.It is assumed that the body is driven by the submerged body so that the arms rotate slowly with an angular velocity of 1°/s around the origin of the system as a fixed point.
The suit overcomes resistance from horizontal current at a speed no more than 0.5 knots.By solving the set of kinetic equations,we can see that the suit still has a certain linear retention,but the attitude angle trajectory movement of the suit is as shown in Fig.8.The fluctuation of the trim angle is improved by the disturbing force and moment formed by the micro-rotational motion of the arms.If the suit is stationary in the water,while the submerged member is still doing the above movement,slow rotation movement will occur to the suit with a tendency to increase the rake angle,as shown in Fig.9.
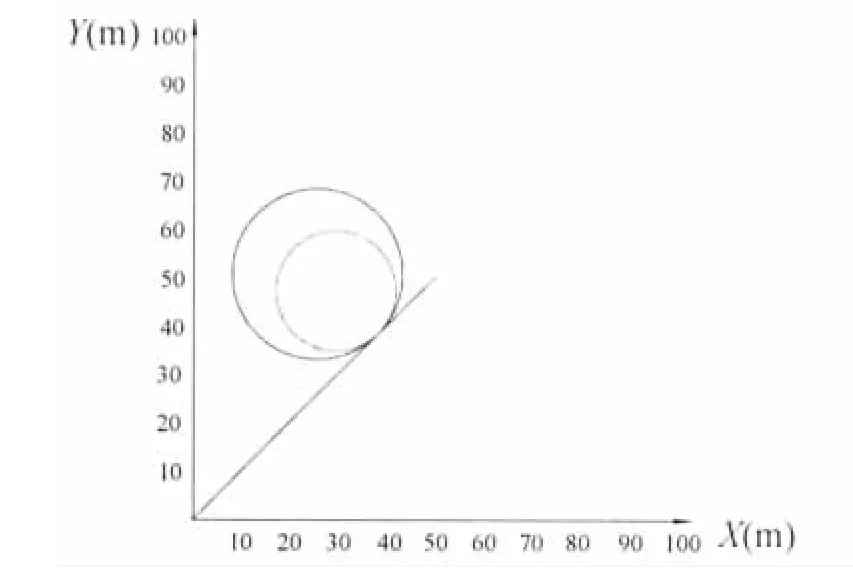
Fig.6 ADS full turn trajectory
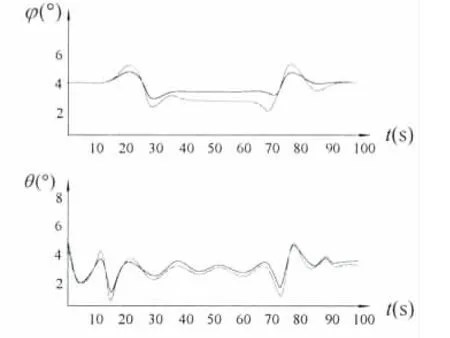
Fig.7 ADS full turn phase angle
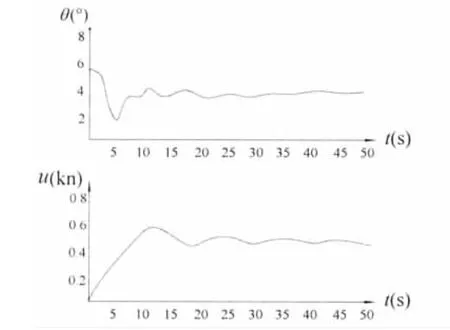
Fig.8 Cruise influence on phase angle
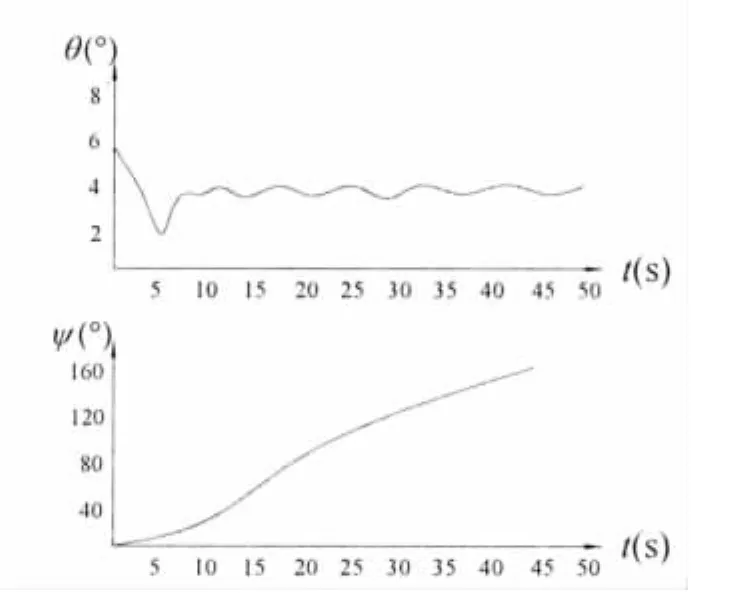
Fig.9 Stand by influence on phase angle
4 Conclusions
In this study,a dynamic model for simulation of ADS is established by combining the rigid body dynamics model and the multi-body kinematics.Mass matrix and the hydrodynamic damping matrix of ADS are established by simulation of multi-body motion.Added mass matrix property of multi-body system is calculated with Hess-Smith method.Typical movements such as navigation,rotation,joint motion are simulated.A good performance of this design shows that:
(1)Dynamic model of rigid multi-body is established,and an efficient hydrodynamic model is built to simulate hydrodynamic performance of the suit such as added mass.This model is applied to the prediction of performance of ADS.
(2)The low-speed movement of the suit requires the frequent operation of the limbs joints and precise positioning.The hydrodynamic damping is more important than inertia moment,gravity and buoyancy.Efficient predictions play a major role in simulation of underwater motion.The added mass property caused by the change of shape is given by CAD surface trimming,and the surface grid is automatically generated for fast simulation.
A detailed hydrodynamic property is given in the tank test.The parameters of mass and propeller are given in the virtual general assembly.Kinematics model can be used for the analysis and evaluation of the performance of the suit.It can forecast the typical movements such as navigation,joint rotary and rotation.
杂志排行

船舶力学的其它文章
- Numerical Calculation of Hull Wave-making Resistance by Three-dimensional RANS Method
- Mathematical Representation of a 3-D Translating Source Green Function and its Fast Integration Method
- Measures to Restrain Propeller-Hull Vortex Cavitation and Some Discussions
- Evaluation of Turbulence Models for the Numerical Prediction of Time-dependent Cavitating Flow During Water Entry of a Semi-closed Cylinder
- Investigation on Higher-Order Responses of Vortex-Induced Vibration for a Mounted Cylinder
- Experimental Study on Dwell-fatigue of Titanium Alloy Ti-6AL-4V for Offshore Structures