基于ROBO.TXT控制的全方位气动水果采摘机设计
2018-10-11李月寒吴何畏史志慧
李月寒,吴何畏,张 武,陈 新,史志慧
(湖北文理学院机械与汽车工程学院,湖北襄阳 441000)
0 前言
传统人工采摘水果作业难度大、采摘效率低,生产力不能适应生产关系的发展。目前多数采摘装置以自动化技术和计算机技术为主体、有机融合各种现代信息技术的系统集成和应用,存在成本造价昂贵、后期机器维护繁琐、采摘与运输不相结合等缺点[1]。本文介绍了以ROBO.TXT为主控的全方位水果采摘机,该设计使用ROBO.TXT控制器、气动元件、机械结构组成,实现了采摘水果自动化[2]。
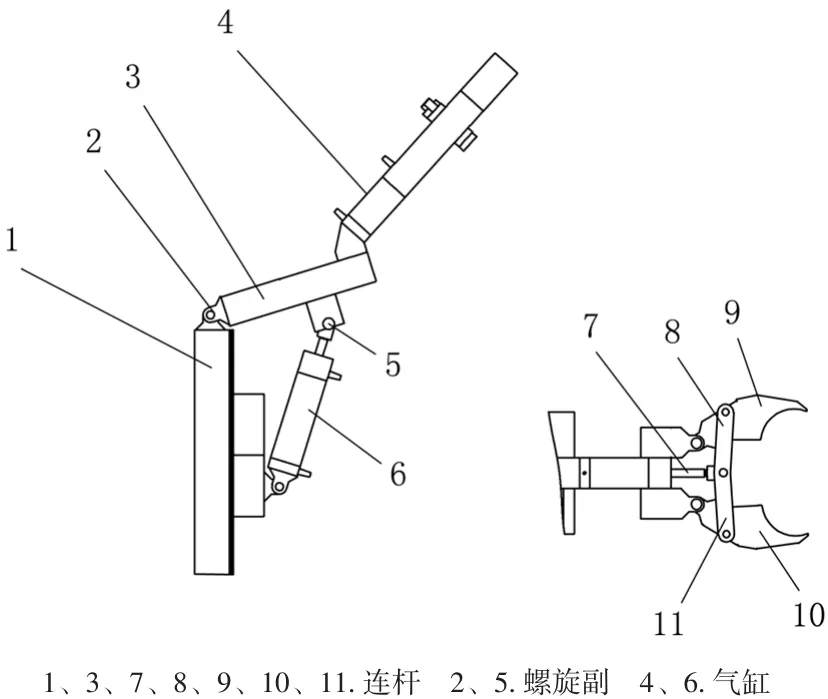
图1 采摘水果机结构示意图
1 气动水果采摘机系统组成和工作原理
气动水果采摘机械手由双气缸、连杆机构、螺旋副组成,连杆、气缸具有成本较低、重量轻的特点。该设计减少果农的经济负担和劳动负担,基本上实现了模拟果农采摘水果的动作。图1为采摘水果机结构示意图[3],6为双气缸带动采摘机升降,4为单气缸带动7、8、9连杆控制采摘机夹紧水果。
整个执行机构安装在蜗轮蜗杆上,实现360°旋转,一个工作节拍可以完成对周围的水果采摘;整体结构包括一个单气缸和连杆机构组成的夹取装置、双气缸传递上升下降运动及蜗轮蜗杆传递旋转运动实现全方位采摘的装置,图2为FLUIDSIM回路仿真[4]。气动传动结构主要包括气缸、电磁阀、气泵、换向阀。气缸1、2出气口有调速阀,起背压、调速作用,机械手加载过程中减小下降速度[5]。气缸3出气口连接减压阀,起减压作用,减小机械手夹紧力,防止损坏水果。三位五通电磁换向阀5、8中位机能为O型起锁紧回路作用。

图2 FLUIDSIM回路仿真
当Y1得电时,机械手上升,当Y2得电时,机械手下降,气缸1、2两缸分别作用平衡机械手上端使其稳定,调速阀在出气口,使开口减小,防止机械手加载过程中下降速度过快。当Y4得电时,机械手夹紧,减压阀在出气口进行减压,使得机械手夹紧力减小,防止损坏水果。当Y3得电时,机械手松开。
2 气动水果采摘机程序设计[6]
2.1 采摘机主程序设计
在程序控制设计方面,使用的是慧鱼ROBOPRO软件,以ROBO.TXT为主控制器,通过ROBOPRO控制软件和接口板把计算机和模型相连,通过程序的设计并进行调试解决问题。该设计特色在于使用了一种全新的程序编辑方式——用各种程式模块来代替编程语言,通过流程图和数字流程图的结合可以生成图形化将机械手的运动流程设计好,再配合所需要的各种程式模块,将其内部的数据设定好即可实现机械手的运行[7]。该控制系统设计由小车驱动程序、采摘机械手旋转程序、采摘机械手平移程序、采摘机械手夹具剪切程序与程序控制界面组成。如图3所示为主程序图,由机械手移动、机械手夹具运动、蜗杆旋转、小车移动4个主程序组成,采用了多进程设计思想。当外部按钮按下时,外部的按钮信号输入主程序模块内,主程序调用子程序,使电机运动或停止,当执行完成子程序时,程序返回到主程序继续等待下一个按钮信号。

图3 采摘机主程序
2.2 行走子程序设计
为实现采摘机构的行走功能,设计了行走子程序。图4所示为小车移动子程序,带动小车运行的电机启动为上升沿触发,按下控制界面里的“车启动”按钮,子程序接收到上升沿的信号,电机带动车轮运动。电机关闭为下降沿触发,按下控制界面里的“车关闭”按钮,电机关闭车轮停止运动。
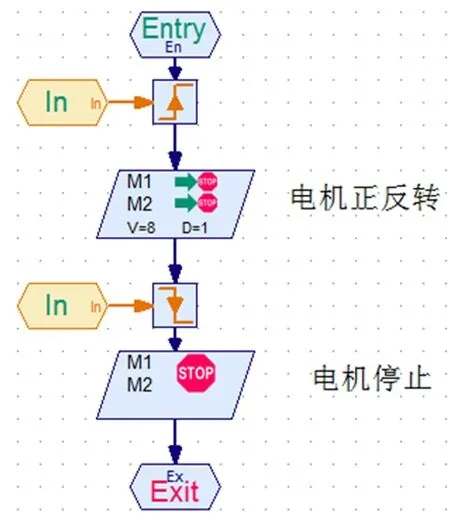
图4 小车行走子程序
2.3 触摸屏面板设计
图5 为采摘机触摸屏面板,点击对应按钮,采摘机便可以执行相应的操作,按钮的含义如图5所示。

图5 采摘机触摸屏面板
“顺时针旋转”、“逆时针旋转”表示电机带动蜗杆,蜗轮进行顺时针逆时针旋转,旋转停止表示控制蜗轮旋转停止。
“前移”、“后移”表示机械手与机械手支撑杆在齿条前后移动,上升、下降表示支撑杆单独在齿条前后移动及螺旋副的旋转支撑机械手夹具上下运动。
“夹具上升”、“夹具下降”表示电磁阀开闭控制气缸的往返运动及螺旋副的旋转,带动机械手夹具的开闭合。
“夹剪水果”、“松开水果”表示电磁阀开闭控制气缸的往返运动,带动机械手夹具的开闭合。
3 结束语
以ROBO.TXT为主控制器,控制机械结构与气动元件。采用气动组件、齿轮齿条组件、蜗轮蜗杆组件搭建采摘机构,由Fluidsim对气动回路的正确进行分析。该设计实现了自动化,减轻果农的劳动负担。
