多无人机的组群飞行特性与控制分析
2018-09-20高祖宇陈俊超
高祖宇 陈俊超
摘要:多无人机的组群飞行可以实现复杂状况下的作业,提升工作效率,但由于无人机自身的特殊性,这一工作方式也存在一些弊端。基于此,文章以多无人机的组群飞行特性作为切入点,简述通信干扰、航道重叠等问题。再以此为基础,重点论述多无人机的组群飞行的控制,并通过模拟实验证明控制策略的可行性,以期通过分析明晰问题、优化理论,为后续多无人机联合作业提供参考。
关键词:无人机;组群飞行;多址共道;跟踪算法;机器学习
无人驾驶飞机(Unmanned Aerial Vehicle,UAV),简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,也可由车载计算机完全、间歇地自主操作。无人机在一些特殊工作领域的应用价值突出,多无人机组群飞行则能够避免单架无人机效率比较低、工作空间小、视角有限等不足,可以充分采集一些重要的目标和信息,分析多无人机的组群飞行特性与控制有突出的现实意义。
1 多无人机的组群飞行特性
1.1 通信干扰
无人机往往通过无线通信的方式进行操作、传输信息,这种通信方式便捷有效,在单无人机的通信活动中可用性较高,但在多无人机组群飞行时,所有无人机是同步进行通信工作的,而且往往只有一个接收端,信号干扰的情况较为严重。在此前德国学者的研究中,当4架以上无人机同步传输信号时,失真率往往超过5.3%,如果存在干扰,失真率会飙升至25%以上,相应的,单无人机的通信即便面临干扰(同等级别),失真率也一般不会超过10%,应对通信干扰是多无人机组群飞行需要考虑的首要问题。
1.2 航道重叠
航道重叠问题在多无人机组群飞行中较为多见,大部分无人机属于感应式,在组群飞行时存在相互干扰的问题,设计人员针对无人机特点进行了默认程序改造,可以保证多无人机避免严重的不协调飞行,但航道重叠问题依然没有完全解决,当组群的无人机数目超过3架时,就可能导致碰撞,如果组群飞行的无人机超过4架,平均每飞行495 m、垂直爬升247 m,就有可能出现一次碰撞,甚至导致无人机损坏。
1.3 反应滞后
反应滞后并不是简单的通信延迟问题,多无人机的组群飞行需要面临较单无人机更复杂的周边环境,这种复杂变化与通信有关,也与周边其他无人机有关。如某类无人机长期执行航拍作业,在此前的工作中锁定对象为固定目标,集中4架无人机进行组群飞行,在飞行过程中,无人机面临动态目标(其他无人机)的影响,如果其默认程序中缺乏可以与动态目標相匹配的模型,或者匹配度不高,无人机可能不会发生规避动作,导致碰撞,这一问题是目前无人机组群飞行的主要负面特征之一。
2 多无人机的组群飞行控制
2.1 应用多址共道通信技术
为应对多无人机组群飞行中的通信干扰,提出多址共道通信技术,该技术的核心原理是将群组中无人机的通信活动分为不同地址,应用相同频段的一个或者几个信道进行传输,当接收端完成信号的接受后,对信号进行分离,再进行提纯和放大,甄别信号中的信息内容,避免多无人机组群飞行的通信干扰。如在进行探测时,派出了4架无人机组群飞行,飞行过程中,以每秒为间隔不断传输侦测所获内容,将不同传输地址融入2个固定信道中,1号信道比特率为16 kbps,2号信道比特率为17 kbps,通信活动同步进行4架无人机的信号频率分别为 1 000 Hz,1200 Hz, 1 400 Hz,1 500 Hz。接收端完成信号接收后,直接应用信号分离器和信号放大器对两个信道内的信号进行分离、提纯,获取信息后再进行核对,综合获取最佳通信结果。
2.2 应用动态模型跟踪算法
多无人机组群飞行的负面特征之一是存在航道重叠问题,对该问题进行分析,可以发现其根本原因是对跟踪算法的敏感性不强。我国无人机发展的早期跟踪算法就得到了重视,但当时的跟踪算法只能针对匀速目标进行,而且目标的外形也必须是近似规则的,这在现实工作中几乎没有价值。后续研究中,针对非匀速和不规则目标的追踪渐渐得到重视,其在无人机中具体应用的方式为多尺度核相关滤波跟踪算法,多尺度算法将不同速度、不同外观的跟踪融合在一起,使无人机的辨识能力大大增加[1]。
假定2架无人机处于飞行工作中,以A无人机的训练为例,目标对象为B无人机,B无人机速度带有变化性,外观也处于非规格状态。训练过程中,将A的速度变化设为一个数集,数集中含有B无人机可能出现的速度变化类型,该数集可以表达为:
[S1,S2,S3,S4,S5,……Sn]
数集中每—个数字都表达—个可能出现的速度。再将B无人机的外观特点制作为一个数集,该数集可以表达为:
[O1,O2,O3,O4,O5,……On]
数集中每一个数字都表达一个独特的外观特点。完成数集构建后,将对应信息代入到A无人机的训练中,当A,B两架无人机组群飞行时,A无人机可以通过传感器感知B无人机的速度和外观状况,与默认程序中速度数集和外观数集的模型进行匹配,数集中的样本越多,匹配度越高,无人机可以实现自动规避,避免航道重叠问题。
2.3 进行大规模机器学习
在动态模型跟踪算法下,可以收集若干数据,这些数据如果采用传统方式进行输入、训练,会消耗较多时间,而且样本本身也难以与无人机的速度、外观情况实现精准匹配。为了提升训练效果、降低航道重叠、无人机反应滞后和碰撞问题,提出大规模机器学习的基本方案,所用学习方法为K近邻算法和随机森林法。
K近邻算法下,将不同维度(假定为速度和外形)的样本进行最大限度的收集,样本数越多,训练效果越理想。在速度维度下,选取若干标准的K点,如每秒5m、每秒5.1m、每秒5.2m、每秒5.3m……直到标准值数满足基本工作要求,将这些K点投入在训练区域中,再将选取的样本投入到训练区域内,样本的速度值要求更加精确,达到每秒5.01 (小数点后至少2位)的水平。样本投入后,所有样本会自行寻找与自身特点(速度值)最接近的K值,完成一轮训练[2]。将训练结果输入到无人机控制系统中,在A,B两架飞机的组群飞行中,B无人机出现速度变化,A无人机通过传感器感知速度类型,与默认系统中的模型进行匹配,判断其属于正常加速,不进行动作,组群飞行即可继续进行,免去碰撞、航道重叠等问题。随机森林法与K近邻算法相似,也通过大量样本收集进行科学、高效的机器学习。一个森林即一个训练区间,森林中的每一树木都是一棵“决策树”,决策树即训练区间内的标准参数。投入样本后,所有决策树对样本进行识别,根据其特点判定样本的类别,随机森林法的训练效率取决于决策树的数目,数目越多,训练效果越好,能够直接提升无人机目标辨别等工作的鲁棒性[3]。
3 模拟实验
3.1 模拟观察指标和参数
为验证上述控制策略的可行性,研究人员进行了模拟实验,选取4架螺旋桨无人机作为对象,进行航拍工作,设定每10 s为间隔进行一次通信传输作业。4架无人机的通信频率分别为:1 000, 1 100, 1 200, 1 300 Hz;选取两个传输信道,比特率分别为17和18 kbps,实验过程中,人为控制无人机的爬升、变速、下降。在实验前,应用K近邻算法和随机森林法进行机器学习,选取样本4 811个,训练时间155 s(K近邻算法)、167 s(随机森林法)。观察指标为无人机通信信号可辨识率、飞行碰撞发生率和反应时间。
3.2 模拟结果
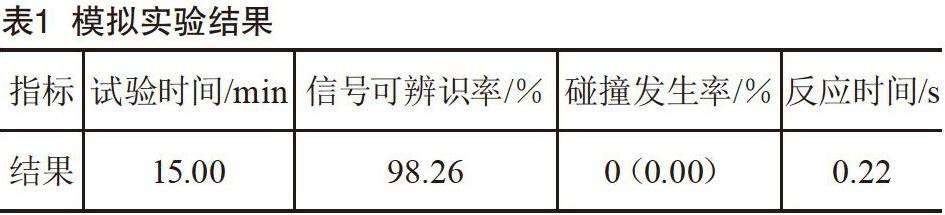
模拟共进行15 min,传输信号90次,观察工作实时进行,反应时间通过无人机内置数字化感应器记录,完成试验后直接读取。实验结果如表1所示。
结果上看,在15 min的实验时间内,多无人机组群飞行得到了有效控制,通信信号的可辨识率达到98.2 6%,未發生碰撞情况,爬升、变速、下降等作业的反应时间平均为0.22 s,能够满足大部分工作的需求,这表明上述各项控制策略是可行的。
3.3 结果分析
结合实验结果可以发现,多无人机的组群飞行虽然带有一些负面特性,但并非完全不可控制,应在执行多无人机组群飞行前,针对存在的问题进行分析,并充分应用现代控制理论、智能技术加以应对。本质上看,无人机是自动化技术发展的产物,其未来应用范围也会更加广泛,进一步探索现代技术的联合应用、集成、嵌入,是提升无人机性能的主要方式。如上文所述的传感器技术、单片机技术、通信技术等,由于环境受限,本次研究没有考虑电磁干扰等问题,后续工作中如果条件允许也应给予完善。
4 结语
通过分析多无人机的组群飞行特性与控制,获取了相关理论成果。无人机在现代社会生产、生活中作用突出,多无人机的组群飞行带有通信干扰、航道重叠、反应滞后的特性,其控制优化则可以借由多址共道通信技术、动态模型跟踪算法和大规模机器学习实现。模拟实验证明了上述控制策略的可行性。后续工作中,可以参考上述内容完善多无人机的组群飞行控制,提升其工作能力。
[参考文献]
[1]STMicro electronics.FCU评估板在贸泽开售让无人机飞行控制设计轻[J].世界电子元器件,2018(1):33.
[2]段镇.无人机飞行控制系统若干关键技术研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2014.
[3]尚何章,李春涛.基于Power PC的小型无人机飞行控制系统设计[J].伺服控制,2012(4):50-52, 64.
