使用ZigBee定位的无线充电AGV系统的设计与实现
2018-09-20王天泽袁尚青陈德雯
王天泽,袁尚青,陈德雯
(南京理工大学紫金学院,江苏南京,210046)
1 AGV特点
AGV采用STM32单片机作为控制核心,利用ZigBee进行路径追踪、躲避障碍、调转方向、自动变轨等功能信号检测。
有如下特点:(1)采用ZigBee技术引导,生产工序改变时,无需重新铺设铁轨,只要修改软件设定就可以改变运输车的运行轨迹。此方法简单,导向可靠,变轨成本近乎于无。(2)利用STM32设计的 AGV 智能车控制系统,整体运行速度快、操作便利、实时性好,适用于各种生产环境。(3)能够无线充电,从而实现自动巡航、自主归位充电的自动化功能,极大地减少了人工的操作。(4)本车连接车轮处使用采用轴承,避免了智能车长时间由于自身压力原因而导致变形,这样传动效能可以更加稳定,增加智能车的使用寿命。(5)样机容易控制,操控方便,行驶稳定,可靠性强,能在大多数的工业环境下完成运输物料的任务,受各因素影响的程度小,控制便捷。
2 设计方案
2.1 系统组成
本设计为基于ZigBee定位无线充电的AGV智能车。AGV智能车通过ZigBee定位建立空间坐标系,由主控串口发送指令,AGV在空间坐标系中实现自动巡航。当AGV电量不足时,智能车自动到达指定充电地点。从而实现AGV智能车的高度自动化工作。大幅提升AGV在各种应用场景的生产力。
系统以STM32为主控芯片,由ZigBee定位系统,无线充电系统组成。系统组成框图如图1所示。
系统以STM32为核心控制模块。由H桥驱动电路PWM控制实现对电机的控制,由CC2530通过IIC和主控机的通讯实现定位坐标系的建立。
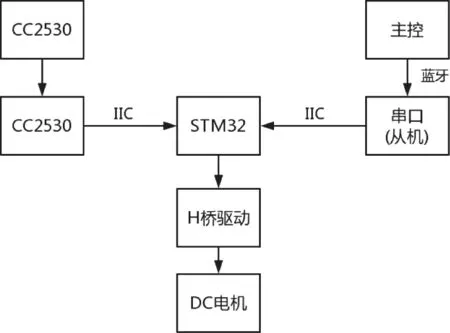
图1 系统组成框图
2.2 方案优势
2.2.1 主控芯片
采用STM32单片机作为系统的核心控制器,控制行驶中的AGV,以达成期待的性能指标。单片机控制便捷、容易、可快速上手,且价格低廉并有很好的控制和可位寻址操作功能等优点。而使用PLC进行控制,虽然抗干扰能力较强,但尺寸大且成本相对较高。因此,选用STM32单片机作为主控芯片。
2.2.2 定位单元
本车采用ZigBee技术进行定位,下面比较几种常见的方案。
方案一:磁轨导航,先在规划路线的地面上贴上磁带,智能车就能根据磁带按照想要的路径进行移动。磁带上方会有磁场产生,智能车底部两端分别放置电磁传感器,这样在磁带的周围,就能通过电磁感应原理感应到磁场,最后控制器就可以控制智能车在规划的路径上运行,当它产生偏移或者要转向、变道时,两个磁感应器收到的磁场信号也会不同,系统则会通过自动控制系统来纠正行驶方向。它的优点在于设计简单、性能可靠、成本不高,缺点就是只能按照磁带所指示的行驶,而且磁带遭受外力容易受损,视觉观感也不好。
方案二:光传感器,一般常见的方案是采用可见光源+光敏电阻或者红外线发射接受管,其中前者方案简单但易受到外界光源的干扰。主要是因为光的反射程度,轨道的平坦度、材料的反射情况等物理因素都会影响探测能力。后者由于采用红外光,因此受可见光影响较小,但也同样需要在地上贴胶带来实现循迹。
方案三:使用ZigBee技术进行定位,采用ZigBee的定位主要是使用接收信号强度指示(RSSI)实现。智能车周边放置数个信号源,发射信号,信号源与智能车彼此间在网络模块的连接范围内,可以相互自动寻找,快速地形成一个相互联动的ZigBee网络。而且,由于AGV坐标的变化,彼此间的状态参数还会产生改变。因而,AGV还可以通过重新连接通信的信号源,确定相互之间的连接,重新刷新原有网络。优点是不需要在地上贴磁轨或者胶带,可以实现零成本变轨,缺点在于精度略低。
2.2.3 驱动模块
驱动模块部分,我们选用普通的直流电机。直流电机运行稳定,有着十分可靠的精度。直流电机调速性能好,调速范围宽。直流电动机在带有重负载时,能够实现均匀、平稳的无级调速,而且起动力矩大,调速范围较宽。而步进电机则是能够定位十分精确并能很好地控制方向。若使用步进电机作为控制用的特种电机,可以很好地对角度和距离控制。步进电机的不存在累积误差而只有周期性误差的特征,使其对于位置、转速等方面的控制用步进电机更好。但是其缺点是相对占用空间较大,转速缓慢,易失步,而且成本较高,操控复杂。直流电机的精度虽不比步进电机好,但其实也可以满足控制要求。使用直流电机作为电动车的驱动电机,不仅成本低,而且可实现无级调速,使智能车运行平稳。
2.2.4 无线充电部分
使用全桥串联谐振,即使没有达到谐振频率时,也能进行能量传递;并且可以通过更改谐振频率来控制功率的大小。而E类放大电路,对于电路特性要求比较高,同时要求工作在谐振状态,串联谐振特性受到负载的影响变化特别明显。因此我们采用全桥串联谐振方案。
2.3 软件设计框图
系统的软件代码的整体框图如图2所示。

图2 系统代码框图

图3 实物照片

图4 实物照片
3 结论
本车由STM32为主控芯片,由ZigBee定位系统,无线充电系统组成,经过测试,能实现大致按照想要的效果移动以及无线充电,最终的实物如图3、图4所示。本文以ZigBee定位和无线充电技术为基础,对AGV 智能车的设计进行了详细的论述。并结合机械部分的设计,开发了一台完整的三轮自动引导、充电智能车,在现场的应用表现良好,达到了预期的目标。采用单片机设计的循迹智能车控制系统,可以在智能车运行过程中调整运行速度,操作便利。试运行下来,该系统可控性好,性价比高,另外预留扩展接口,便于扩展以后如的GPS 导航等功能,实际使用价值较高。此外,若进行多台AGV的组网运行,定位应该会更为准确。
