仿生鳐鱼水下机器人的设计与仿真分析*
2018-09-20
宁波大学机械工程与力学学院 浙江宁波 315211
1 设计背景
随着陆上资源的不断紧缺和对海洋资源开发的强烈需求,水下推进器迅速发展。然而,目前进行海洋探索的水下推进器大多以螺旋桨为推进装置[1],存在体积大、能耗高、噪声大和机动性差等缺点。以胸鳍波动作为推进模式的鳐科鱼类,如蝠鲼、牛鼻鲼等,在机动性、推进效率及适应能力等方面具有优越性[2],因此,对鳐鱼的研究越来越引起人们的关注。
鱼类有多种运动形态,仿生学研究人员依其推进方式的不同,主要分为BCF(身体/尾鳍)和MPF(中央鳍/对鳍)两类模式[3]。鳐鱼是典型的MPF模式鱼类,目前国内外对仿生鳐鱼的研究已经有了很大进展。
杨少波等[4]以牛鼻鲼为研究对象,胸鳍两侧通过八个舵机进行驱动,模仿胸鳍波动运动模式鱼类,已基本达到预期效果。王田苗等[5]也以牛鼻鲼为研究对象,加入了尾鳍,可实现自由转向,游动性能有了极大提高。王扬威等[6]以蝠鲼为研究对象,以形状记忆合金为驱动材料,体型小巧,运动无噪声,但驱动力不足,游动速度较慢。
Low等[7]以蝠鲼为研究对象,通过多舵机驱动,可以实现和鳐鱼基本一致的自主游动。Chen等[8]以鳐鱼为研究对象,以锆钛酸铅无机材料作为驱动,可以很好地实现模仿鳐鱼的游动形态,但游动速度比较慢。Evo Logics公司[9]以人造肌肉技术研制了一款仿鳐鱼机器人,采用气动肌腱的驱动模式,能够实现较好的运动。
目前,国内外在鳐鱼的运动学研究[10]方面已经有了一定成果,笔者设计了一款仿生鳐鱼水下机器人,建立其结构与运动学模型,并在此基础上进行运动仿真。
2 鳐鱼结构设计
鳐鱼的种类有几百种,可依据外形大致分为两类:类三角形和椭圆形[11]。笔者以胸鳍波动模式类三角形鳐鱼作为研究对象,其运动简图如图1所示[9]。鳐鱼通过宽大的胸鳍产生波形,波形向后传递推动水流向后运动,所获得水流的反作用力即为前进的推力。
鳐鱼在游动时,身体部分是不参与运动的,主要是通过胸鳍的波动来获得推进。因此,结构设计的重点在于传动构件及胸鳍的设计。
根据鳐鱼胸鳍波动推进的运动特点,传动构件的目的是将动力传送到鱼鳍位置,使鱼鳍发生柔性变形,进而产生自前往后的传递波,来推动鳐鱼的前进。为了使系统具有更好的传动效率,采用摆动导杆机构作为鱼鳍的驱动机构。摆动导杆如图2所示,以C点作为坐标原点建立直角坐标系,其中为为A、C两构件之间的距离为A、B两构件之间的距离为C、B两构件之间的距离,θ为杆与X轴正方向的夹角,杆与X轴正方向的夹角。
依据lCA+lAB=lCB,可得到:

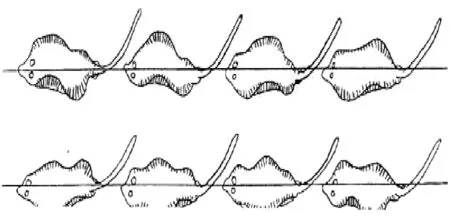
▲图1 鳐鱼运动简图
将式(1)展开,并按照等式两边实部与虚部分别相等的原则,可得到:

由式(2)、式(3)可得到:

对式(4)进行求导,可得到:

从图2及式(5)可以得到:当BC杆运动到上下极限位时,速度最小,机构的传动效率最高;当BC杆运动到中间位置时,速度最大,传动效率最低。
根据摆动导杆机构的运动原理,设计出如图3所示仿生鳐鱼内部结构。传动构件采用曲轴形式,位置按固定方向以60°相位差依次发生偏转,构成一个旋转周期。鳐鱼的胸鳍通过鳍条构成骨架,模仿真实鳐鱼的胸鳍形状,采用对称的设计模式,每侧胸鳍各包含六根鳍条,并且鳍条的长度自前往后依次递减。结构中,前面的底板主要起固定舵机的作用,后面的底板主要起固定各轴的作用。曲轴与底座焊接在一起,同时底座固定在舵机上,实现舵机的转动,并带动曲轴转动,进而实现鳍条的上下摆动,六根鳍条的端点连线近似为一个周期的正弦曲线。

▲图2 摆动导杆示意图
为了与真实鳐鱼的运动相符,达到软体机器人的效果,鱼鳍之间采用硅胶薄膜相互连接,使鳍条的摆动带动软体硅胶薄膜起伏波动,从而实现鱼鳍整体波动。仿生鳐鱼整体结构如图4所示。
3 鳐鱼机构运动学仿真
为了验证所设计仿生鳐鱼机构的可行性,对机构进行运动学仿真。整个仿生鳐鱼的机械传动原理是依据摆动导杆机构,因此针对图3所示模块进行仿真即可。简化模型,利用ADAMS仿真软件取一根鳍条进行机构的仿真分析,如图5所示。
设置舵机的转速为5 rad/s,鳍条上下摆动方向为Y方向,取鳍条端部中间位置任意一点,初始位置y=40 mm,得到该点随曲轴转动时的位移变化情况,如图6所示。由图6可知,该点位置沿直线y=40 mm上下波动,上下位移变化量基本相同,呈周期性分布,说明鳍条可以实现上下对称的往复摆动。
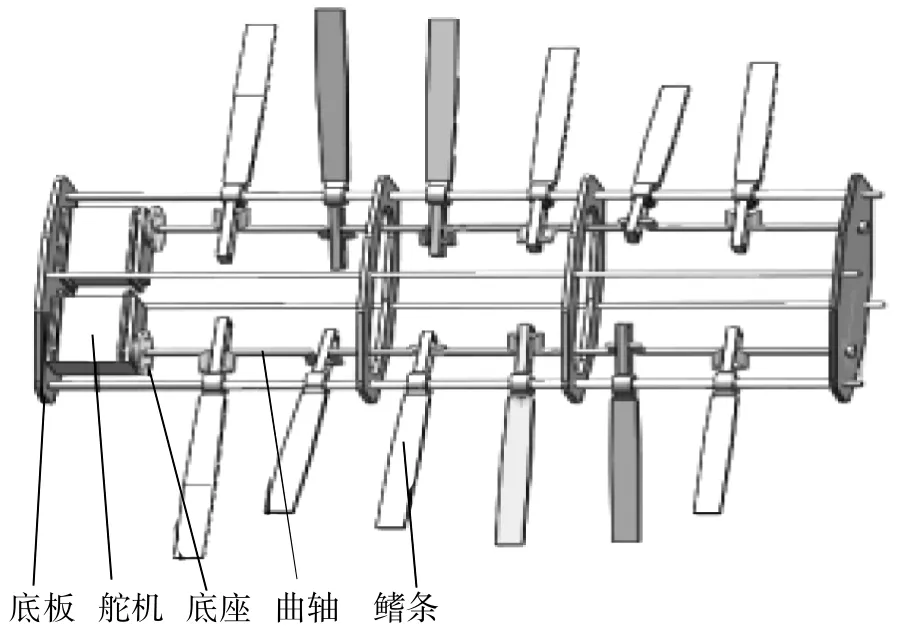
▲图3 仿生鳐鱼内部结构
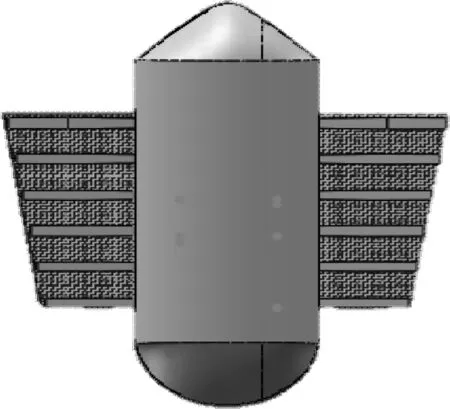
▲图4 仿生鳐鱼整体结构

▲图5 仿生鳐鱼机构仿真
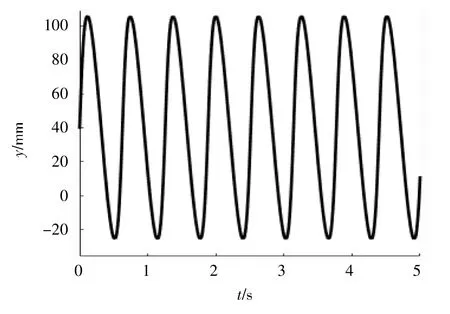
▲图6 鳍条位移变化
图7所示为舵机不同转速时鳍条角速度ω的变化情况。通过试验可知,鳍条的角速度随时间呈周期性变化,随着舵机转速的增大,鳍条运动速度也在逐渐增大。而且当曲轴的轴颈运动到与鳍条滑槽垂直的位置时,鳍条正好运动到上下两个极限位,即摆动角度θ最大,此时角速度为0。当运动到平行位置时,此时摆动角度为0,鳍条角速度最大。这与前文公式推导出的结论相符合,验证了机构的合理性。
轴颈在滑槽中作圆周运动,其对滑槽的作用位置也在变化,因此导致鳍条的角速度变化并不是上下均匀对称分布的。如图8(a)所示,轴颈从上极限位运动到B位置的过程中,作用位置离鳍条转动中心A距离越来越近,直至最近,使鳍条角速度较快地从0逐渐增大到最大。如图8(b)所示,当轴颈从下极限位运动到B位置时,作用位置与转动中心A的距离越来越远,直至最远,此时鳍条角速度也从0逐渐增大,但增大速度较慢。这是由于此过程中轴颈对滑槽的作用位置到转动中心的距离大于上极限位到B位置过程中的距离,在舵机转速恒定时,作用位置离转动中心距离越近,鳍条运动速度越快,因此曲轴从下极限位运动到平行位置时的角速度要小于从上极限位运动到平行位置时对应的角速度。

▲图7 舵机不同转速下鳍条角速度
4 鳐鱼鱼鳍运动学建模与仿真
4.1 鳐鱼鱼鳍运动学建模
对鱼鳍部分创建运动学模型,鳐鱼的鱼鳍运动以正弦波动形式传递[12],其运动学方程为:

式中:k=2π/λ;ω=2πf;x,y 为空间坐标系中鱼鳍上任意一点坐标;t为运动时间;λ为行波波长;f为行波频率;A为鱼鳍波动的振幅。
仿生鳐鱼运动时,通过摆动导杆机构将动力传递到鳍条上,鳍条上下摆动带动鱼鳍波动。因此,按照鳐鱼的运动模式,对鱼鳍进行运动仿真。由于鱼鳍两侧对称分布,因此只需要对一侧鱼鳍进行研究。
对鱼体部分进行简化,依据鳍条的排列形式及鱼鳍的波动模式,按照与所设计的鱼鳍结构1∶1的比例,将各鳍条之间以平滑的曲面相连,使六根鳍条构成一个波动周期的正弦曲面。鱼鳍运动初始状态的仿真模型如图9所示。

▲图8 轴颈与滑槽平行时位置示意图
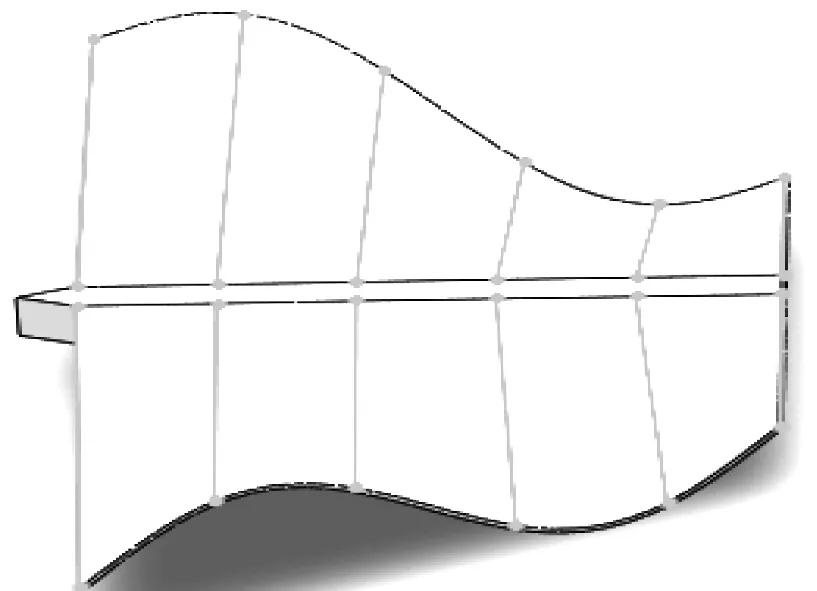
▲图9 鱼鳍初始状态仿真模型
4.2 鱼鳍运动过程中表面压力分析
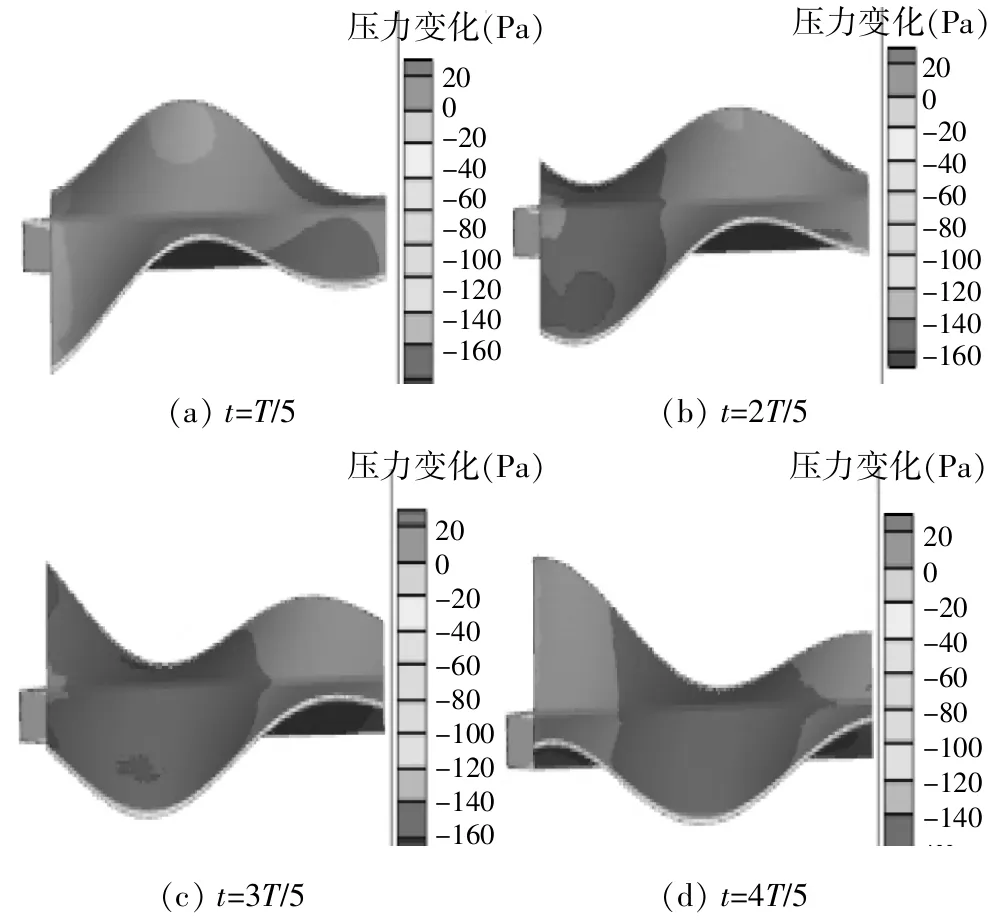
采用Fluent流体动力学仿真软件进行鳐鱼鱼鳍的运动仿真,由于鱼鳍在流体中以波动模式进行运动,根据运动学模型编写自定义程序,在Fluent中通过接口进行编译,使鱼鳍按照正弦函数的形式进行运动。在Fluent中建立流场环境,并设置边界条件,导入程序,对各参量值初始化,设定步数进行计算,直至步数完成,计算结束。完成后取一个周期的结果进行分析,可得到鱼鳍运动过程中表面压力变化分布云图,如图10所示,其中T为鱼鳍的运动周期。
由图10可看出,在鱼鳍以最大振幅运动的一个周期中,运动波也随之自前往后传递,以此按照正弦波动形式呈周期性运动。鱼鳍上表面的高压区域同样随波传递而变化,分布在鱼鳍波动峰值附近,并且靠近鱼鳍边缘,说明此处流体对鱼鳍的反作用力较大。鱼鳍边缘是鳐鱼运动的主要动力来源,高压区域随鱼鳍周期性波动也会周期性变化,从而实现鱼鳍在流体中的有效运动。
4.3 鱼鳍运动过程中附近流体压力分析
由于鳐鱼的运动主要靠两侧鱼鳍的波动,而两侧鱼鳍对称分布,因此对一侧胸鳍波动时周围流体的情况进行分析。以z=0.1 m平面对流场进行截取,胸鳍周围流体压力变化云图如图11所示。由图11可看出,胸鳍周围的压力分布与鱼鳍表面压力分布基本一致,当鱼鳍部位压力较高时,对应的周围流体压力也较高。另外,胸鳍上下方流体的压力呈周期性变化,并且胸鳍背水面周围流体压力的变化始终大于迎水面周围流体压力的变化,符合鳐鱼的运动规律。
5 结论
通过对波动推进式鳐鱼特性进行分析,设计了一款仿生鳐鱼水下机器人,并对所设计的机构进行运动学分析。依据鳐鱼在水中的游动模式,建立了仿生鳐鱼的运动学模型。又根据所设计的鳐鱼结构,在Fluent软件中创建鳐鱼的仿真模型,通过编程仿真了鱼鳍的运动,分析了鱼鳍表面压力分布及胸鳍附近流体压力分布情况,验证了波动鱼鳍推进模式的可行性,为后续仿生鳐鱼水下机器人样机的建立提供了理论依据。
后续工作将依照已建立的数学模型,完成仿生鳐鱼机器人的试验装置,通过试验和仿真进行比较,同时增加动力学性能研究,得到影响鳐鱼游动性能的更加全面的结论,对研究进行完善。
▲图10 鱼鳍运动过程中表面压力变化分布云图
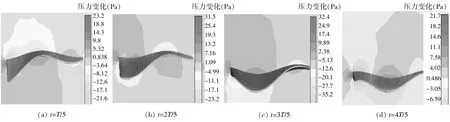
▲图11 胸鳍周围流体压力变化云图
