机械臂连杆设计探讨
2018-09-20汪亚利徐成龙尹艳超祝胜山
郝 启,汪亚利,徐成龙,尹艳超,祝胜山
(1.沈阳理工大学 机械工程学院,辽宁 沈阳 110159;2.中国科学院 沈阳自动化研究所,辽宁 沈阳 110116)
随着科技的发展,除制造业中应用的工业机器人之外,还有种类繁多的各类机器人,越来越多地被用于资源开发、排险救援、社会服务和军事、航天等领域[1-3].根据工作需要,工业机器人大多以机械臂的形式存在,用于完成喷漆、点焊、搬运等工作.机器人机构本体的设计在机器人研究中占有举足轻重的地位,机构设计是机器人设计的第一阶段,机器人机构设计及其评价指标一直以来都受到国内外学者的关注,也是机器人设计阶段必须解决的一个难题.
机械臂的主要零部件就是机械臂连杆[4],它是机械臂各关节相互链接的桥梁.轻便可靠的机械臂连杆工作时惯性力较小[5],有利于减轻机械臂的轴承负载及振动.机械臂连杆设计应该减少对工作空间的浪费,减少外形尺寸对运动空间的限制;降低惯性力对机械臂的影响,在满足刚度要求的前提下尽量减小连杆的质量[6],在确定连杆质量后尽可能提高其抗弯曲变形和抗扭转变形的能力.
在工程应用中,机械臂连杆的实际截面形状一般有空心矩形和空心圆形两种.将其做成空心的目的是方便在机械臂连杆内部走线.
1 圆形与矩形空心截面机械臂连杆力学性能的比较
本文以实际应用的空心机械臂连杆为研究对象,对圆形和矩形空心截面的机械臂连杆进行力学性能的比较.
根据材料力学弯曲正应力强度条件[7]:
(1)
式中:σmax为连杆所受最大应力;[σ]为连杆许用应力.
机械臂连杆末端所受最大力矩Mmax与连杆的抗弯截面系数W成正比,抗弯截面系数越大连杆的力学性能就越好.但是机械臂连杆的截面面积越大,其自身的质量就越大.因此,在满足需求条件下,连杆截面面积越小越好,抗弯截面系数越大越好.
为方便起见,本文以空心正方形截面为例,对空心矩形截面机械臂连杆进行讨论.设空心连杆正方形截面的外部边长为H,内部边长为h,壁厚为k1(图1),则空心正方形截面连杆的抗弯截面系数为:

图1 空心连杆正方形截面

(2)
根据平面几何关系,有:
(3)
则:
(4)
对于图2所示的空心圆形截面连杆,D为最大外径,d为内径,k2为壁厚,则其抗弯截面系数为:
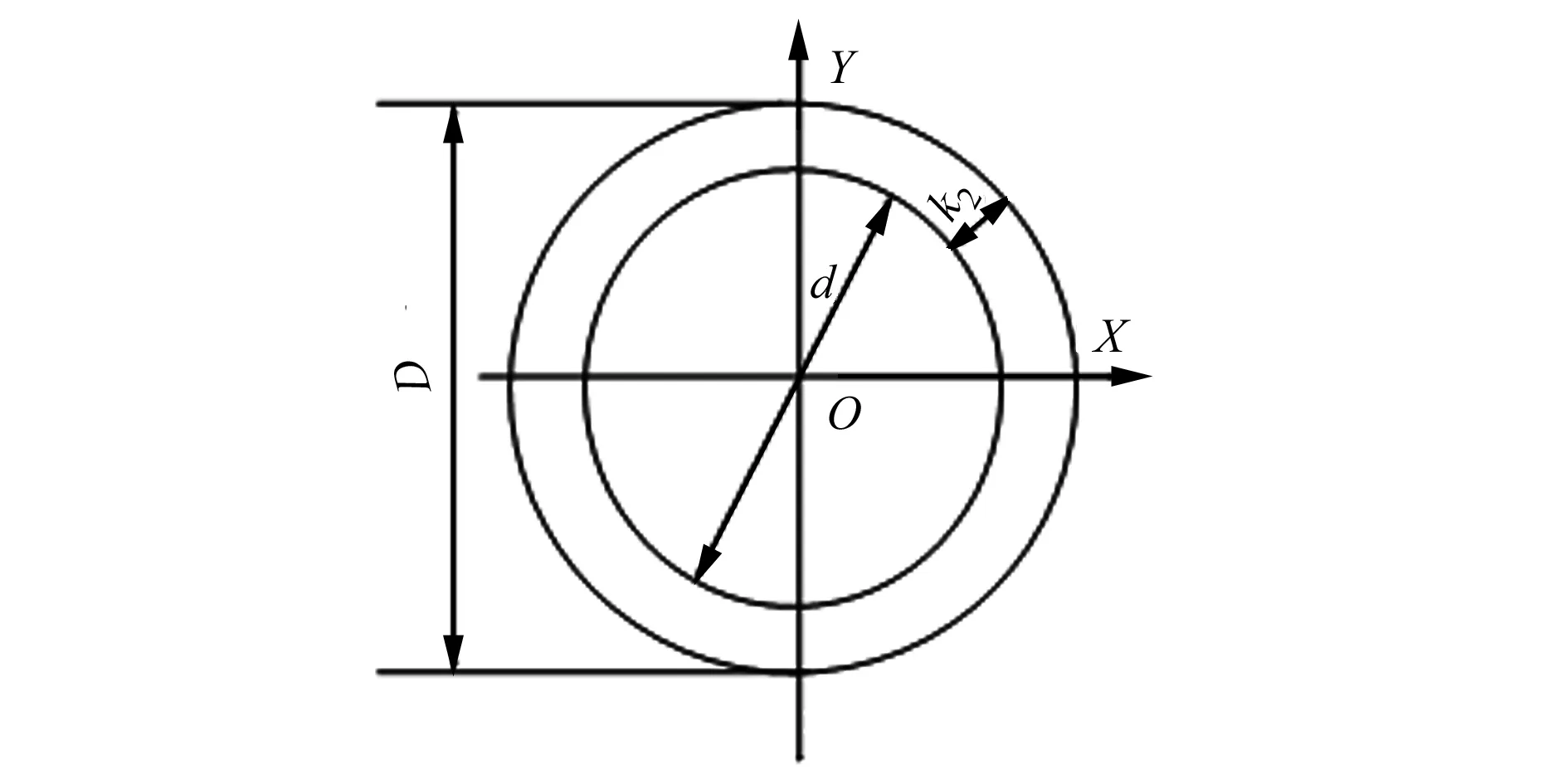
图2 空心连杆圆形截面
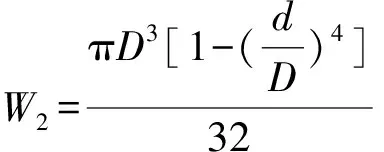
(5)
空心圆形截面连杆的壁厚为:
(6)
则:
(7)
1.1 圆形与方形截面连杆壁厚相同条件下比较
为了便于比较,假定空心方形截面连杆与空心圆形截面连杆的壁厚相同,同时H=D.用Matlab绘制出二者抗弯截面系数与壁厚系数(截面中通过连杆轴心实心部分的长度与截面边长或直径的比值称为壁厚系数)的关系曲线(图3).绘图时假定D=1,k1和k2均大于0而小于0.5.

图3 方形与圆形截面连杆抗弯截面系数与壁厚系数的关系
从图3可以看出,在壁厚以及截面最大外部轮廓尺寸相同时,方形截面的机械臂连杆在刚度方面优于圆形截面;当壁厚系数为0.4~0.5时,抗弯截面系数趋于平缓并达到最大值.
1.2 圆形和方形截面连杆面积相等条件下比较
图1中方形连杆截面的面积为:
A1=H2-(H-2k1)2
(8)
图2中圆形连杆截面的面积为:
(9)
当连杆矩形与圆形截面面积相等时,由式(8)和式(9)可得到关于k1与k2的如下关系.
(10)
为了研究连杆的抗弯截面系数与连杆壁厚的关系,令k1/H先后为0.05,0.10,0.15,0.20,0.25,可分别求出k2、W1和W2,并可进一步求出k2/D、W1/H3和W2/D3(表3).
注:截面面积相等且圆形截面的最大直径与方形截面外部边长相同.
从表1可以看出,当空心方形连杆和空心圆形连杆的截面积相等,圆形截面的最大直径与方形截面的外部边长相同时,虽然圆形截面连杆的壁厚大于方形截面连杆的壁厚,但是圆形截面连杆的抗弯截面系数要小于方形截面连杆的抗弯截面系数;空心方形截面连杆的空腔要大于空心圆形截面连杆的空腔,即方形截面连杆更有利于其内部空间的布线.
综合以上两种情况得出,在机械臂连杆的选型中,空心方形截面的连杆要优于空心圆形截面的连杆.
2 机械臂连杆弯曲程度对变形量的影响
对机械臂连杆的设计形状调研后发现,有的机械臂连杆设计为直杆,有的则设计为带有一定弧度的弯杆,而目前的文献资料中针对机械臂连杆形状设计的研究并不多.本文以卡氏第二定理为切入点,探究相同载荷下机械臂连杆末端变形量的大小.
2.1 弯杆状机械臂连杆受力形变分析
对于弯杆状机械臂连杆,可假定它是一段从圆上取下的圆弧(图4).

图4 弯杆状机械臂连杆受力分析示意图

M=FR[cosα-cos(α+β)]
(11)
(12)
截面B处有力偶,可直接使用卡氏定理计算出B点的垂直位移δ1.
(13)
式中:EI为抗弯刚度.
2.2 直杆状机械臂连杆受力形变分析
为了便于比较,假定直杆和弯杆的端点与终点的直线距离相同,即有相同的运动尺寸(图5).
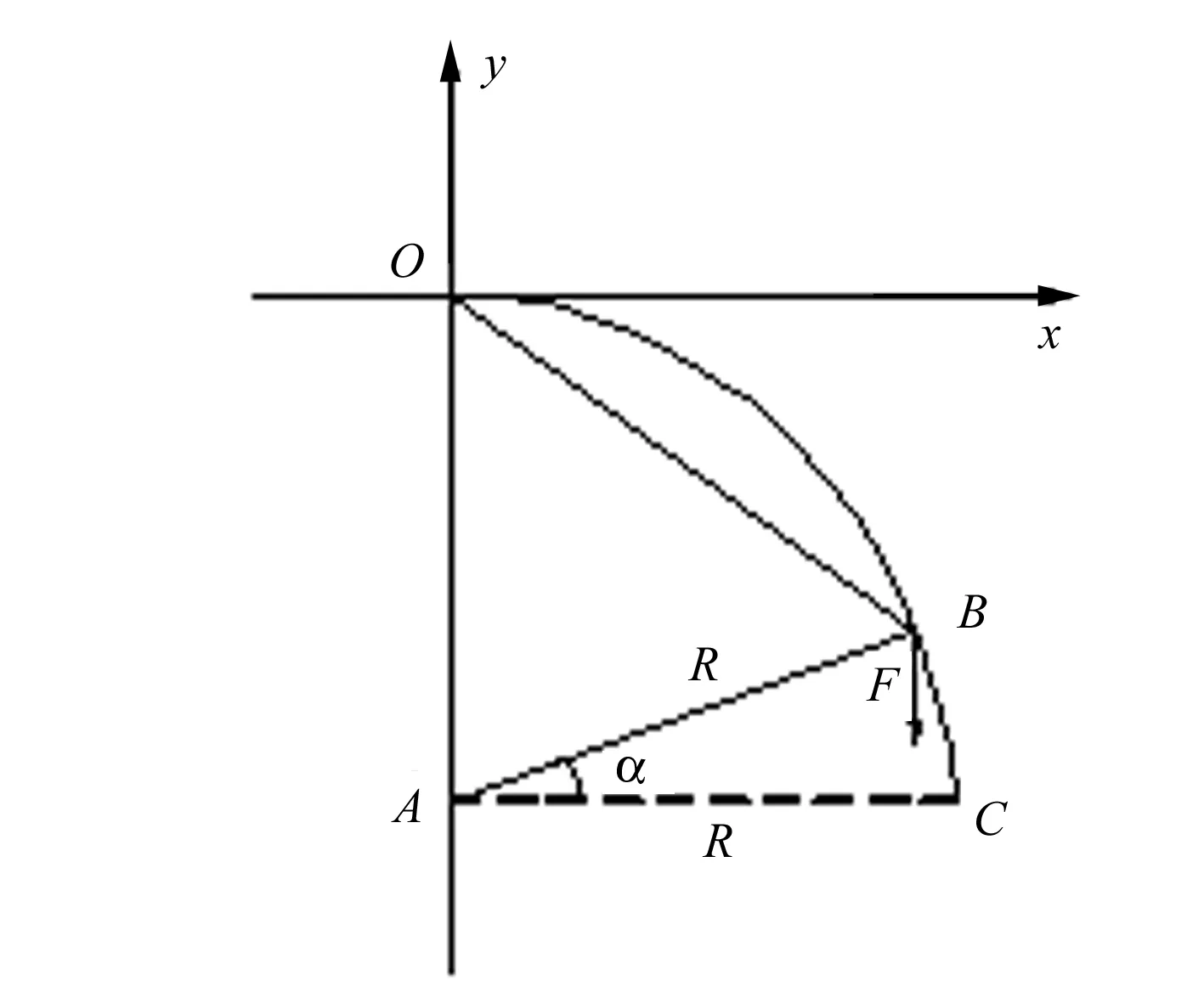
图5 直杆状机械臂连杆受力分析示意图

(14)
(15)
根据直梁的位移计算式可整理计算出直杆状机械臂上B点的位移δ2.
(16)
对上式进一步化简可得:
(17)
2.3 直杆与弯杆变形量的比较
为比较直杆和弯杆的变形量,设直杆和弯杆除了具有相同的末端力F,所在圆弧具有相同的半径R外,也具有相同的抗弯刚度EI.运用Matlab软件对式(13)和式(17)进行运算,绘出α角在一定取值范围内,直杆和弯杆末端在相同受力下的变形量(图6).
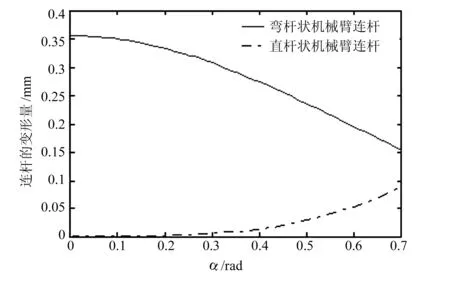
图6 弯杆与直杆变形量的比较
从图7可以看出,在相同条件下,弯杆状连杆的变形比例、最大合位移均大于直杆状连杆.因此,在设计机械臂时应首选直杆状连杆,以便提高机械臂的刚度和运动精度.

图7 空心方形连杆的有限元仿真分析结果
3 结 论
对实际中应用最多的空心矩形截面的机械臂连杆和空心圆形截面的机械臂连杆,以及连杆设计中的直杆和弯杆进行了研究.
(1)空心方形截面的机械臂连杆与空心圆形截面的机械臂连杆,在相同壁厚且方形截面边长等于圆形截面直径的情况下,空心方形截面的机械臂连杆刚度要优于空心圆形截面的机械臂连杆.
(2)空心方形截面的机械臂连杆与空心圆形截面的机械臂连杆,在相同截面积,即具有相同质量,同时方形截面的边长等于圆形截面直径的情况下,空心方形截面的机械臂连杆刚度要优于空心圆形截面的机械臂连杆.
(3)把机械臂连杆的截面设计为空心方形截面,通过卡氏定理对具有相同运动距离的直杆状机械臂连杆和弯杆状机械臂连杆进行受力分析以及有限元仿真,直杆状机械臂连杆的变形量要小于弯杆状机械臂连杆,更能保证机械臂的运动精度和使用寿命.