空间相机定标机构退出装置设计
2018-09-15王庆颖王建冈贾慧丽赵鑫李晓
王庆颖 王建冈 贾慧丽 赵鑫 李晓
(1 北京空间机电研究所,北京 100094) (2 航天东方红卫星有限公司,北京 100094)
星载空间相机中定标机构发生卡滞,遮挡在相机的通光路径时,会造成成像功能的部分或全部丧失。在这种情况下,如果采用退出装置将遮挡部分退出光路,相机仍能继续完成成像任务。2010年,汪逸群等人在文献[1]中提到,NASA的宽视场红外测量探测器(WISE)扫描机构通过冗余设计装备冗余电机、感应同步器及控制电路以延长寿命[1-2],提升了任务的可靠性,但增加了结构的复杂程度和质量。2015年,贾慧丽等人提出一种定标机构故障应急复位装置[3],通过对记忆合金棒加热完成机构复位运动,解决了电机或控制电路故障引起的漫反射板遮挡光路问题,但无法应对定标机构的摩擦力矩超出电机驱动能力带来的卡滞故障。然而,由于定标机构长期在真空中工作,热环境的变化或者润滑效果下降都有可能造成机构摩擦力矩上升到超出电机能力。
本文提出了空间相机定标机构退出装置的设计方案,用于解决定标机构的电机、控制电路失效以及摩擦力矩上升至超过电机驱动能力引起的卡滞问题,并且相比采用冗余设计方案,该方案设计的机构结构简单,质量轻。
1 定标机构及其退出装置的工作原理和构造
定标机构及其退出装置的工作原理如图1所示。定标机构主要由电机、传动齿轮、轴承和负载等组成,完成定标工作。退出装置包含分离组件和退出组件两部分。分离组件主要由离合器和记忆合金驱动器[4-5]组成,实现齿轮和负载的分离。退出组件主要有记忆合金致动器、退出轴、卷簧盒、卷簧、挡臂等组成,实现机构卡滞时的退出。
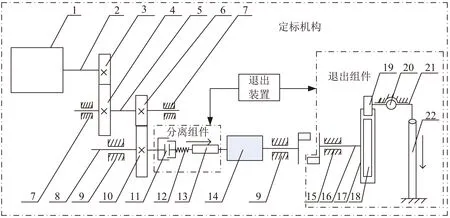
注:1驱动电机,2电机轴,3一级主动齿轮,4一级被动齿轮,5中间轴,6二级主动齿轮,7中间轴轴承,8负载轴,9负载轴轴承,10二级被动齿轮,11离合器,12弹簧,13记忆合金驱动器,14负载,15退出轴轴承,16退出轴,17卷簧盒,18卷簧,19挡块,20挡臂转轴,21挡臂,22记忆合金致动器。
图1 定标机构及其退出装置工作原理
Fig.1 Working principle of the calibration mechanism including the exiting mechanism
定标模式下,驱动电机带动齿轮转动,动力经齿轮、齿轮和齿轮构成两级平行轴传动,离合器连接齿轮和负载轴,弹簧压紧离合器,传递力矩,从而带动负载转动实现定标。此时,卷簧在挡块的阻挡下保持预紧状态。一旦发生卡滞,退出模式启动。首先,安装在负载轴内部的记忆合金驱动器在加热棒的加热下收缩变形,带动离合器脱开,齿轮与负载轴分离,排除驱动电机和控制电路的故障。完全分离后,记忆合金致动器内部的加热棒加热,记忆合金变形带动挡臂绕挡臂转轴旋转,挡块抬高,放开对卷簧盒的阻挡,卷簧放松,驱动退出轴转动,直到退出轴与负载轴接触,进而带动负载转动退出光路。
退出装置构造如图2所示,记忆合金驱动器安装在负载轴内部,节省空间。与单独备份一套相同电机和齿轮的冗余设计方案相比,此退出装置的构造更为简单紧凑,质量减轻约32%。
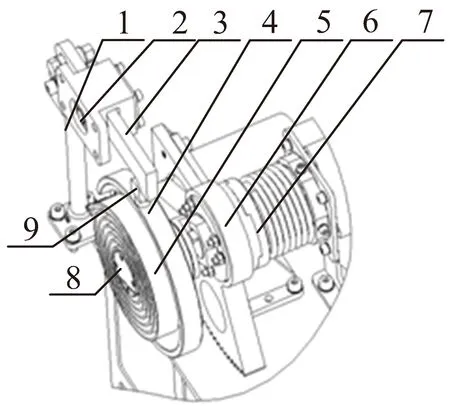
注:1记忆合金致动器,2挡臂转轴,3挡臂,4卷簧盒,5卷簧,6二级大齿轮,7离合器,8退出轴,9挡块。
图2 退出装置构造
Fig.2 Construction of the exiting mechanism
2 关键零件的参数设计
离合器的自锁失效和强度失效都会造成定标机构无法正常工作,卷簧的驱动能力影响到退出功能的实现。因此退出装置的关键零件包括离合器和卷簧。
2.1 离合器参数设计
选用牙嵌离合器[6-7],端面齿刚性联结,弹簧压紧,防止冲击、振动条件下的松动,具有结构简单、尺寸小、传递转矩大、无相对滑动等特点。结合脱开难易程度、强度和工艺复杂性,选择正梯形齿。离合器一半材料为钛合金TC4R,一半材料为铝合金5A06,接触部分涂覆MoS2防真空冷焊。为了不增大轴向尺寸,记忆合金长度L控制在负载轴尺寸范围内,L≤130 mm,收缩距离为5~5.5 mm,考虑2 mm安全距离,离合器端齿高度h≤3 mm。根据离合器轴径、工作条件和工况,进行离合器参数设计,结果见表1。
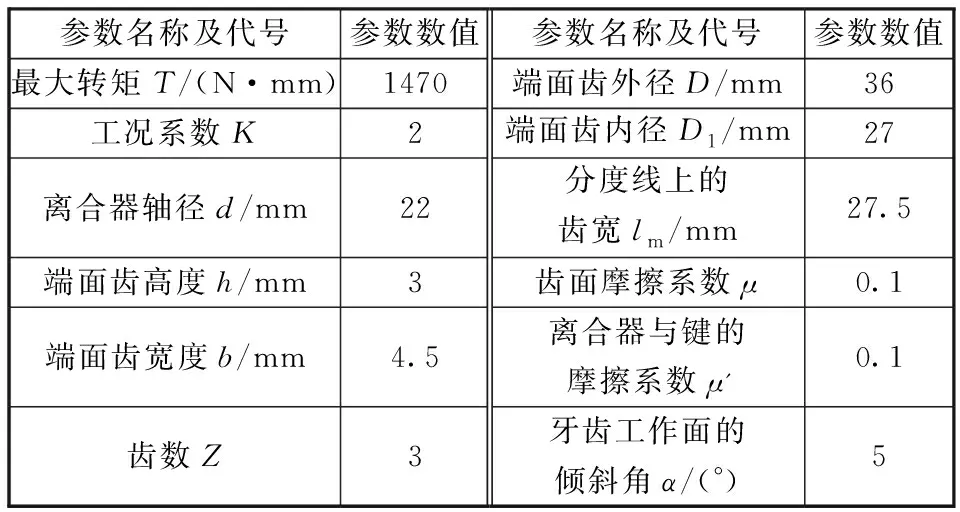
表1 离合器设计参数表
离合器承担机构定标工作时动力的传递,其可靠性直接影响机构可靠性,主要失效形式为:端面齿压溃,齿根弯曲折断及啮合自锁失效。针对这三种失效形式进行校核计算,端面齿挤压强度条件、抗弯强度条件、啮合自锁条件分别对应式(1)、(2)、(3)。
(1)
式中:σp为齿面挤压应力;Tc为计算转矩;Dp为端面齿平均直径;z'为计算牙数;h为端面齿高度;b为端面齿宽度;σpp为齿面许用挤压应力,σpp=167 MPa。
(2)
式中:σb为齿面弯曲应力;lg为齿根宽,σbp为齿面许用弯曲应力,σbp=103 MPa。

(3)
式中:d为离合器轴径。经校核计算得到:
σp=13.8 MPa<σpp,σb=0.5 MPa<σbp,α=5°<13.7°,满足强度和自锁条件。
2.2 卷簧参数设计
卷簧通过释放储存的力矩,驱动发生卡滞故障的负载顺利退出。应满足以下功能:当电机、控制电路失效时作为动力源,驱动定标机构退出;当机构摩擦力矩上升至超过电机驱动能力时,提供更大的驱动能力。设计时将卷簧安装在独立于负载轴的退出轴上,避免卷簧成为电机的负载。从表1中可知,电机通过齿轮传递给负载轴的最大力矩为1470 N·mm。根据工程研制经验,选取此力矩的2倍作为卷簧的设计力矩。因此卷簧的设计力矩M≥2940 N·mm,计算公式如下[8]。
M=kjθj
(4)
式中:kj为卷簧刚度;θj为卷簧扭转角。由式(4)可知,卷簧的刚度决定了驱动力矩,是卷簧的重要设计参数。根据安装尺寸的限制可以确定卷簧的内径Dj1、外径Dj2和宽度bj的尺寸。
根据卷簧强度条件可以得到卷簧的最小厚度hj为
(5)
式中:K2为系数,与卷簧外端固定方式有关;[σ]为许用应力。
卷簧的工作长度lj为
(6)
式中:dj为圈间距。
卷簧的刚度kj为
(7)
式中:E为弹性模量,Kj1为系数。卷簧选用带状铜合金QBe2.0,圈间涂MoS2防冷焊涂层。经计算,主要设计参数见表2。卷簧刚度kj为5.35 N·mm/(°),设计力矩为3370.5 N·mm,达到电机驱动能力的2.3倍。
3 退出功能仿真分析
3.1 离合器分离功能仿真
在ADAMS软件中,对离合器分离功能进行运动仿真[9]。记忆合金驱动器应能克服弹簧阻力,弹簧刚度Kh=12.5 N·m,弹簧工作行程H=5 mm,弹簧的阻力为Fh=KhH=62.5 N,记忆合金驱动器收缩力应大于62.5 N。测试结果显示:加热温度范围70~85℃,相变时间80 s以内,收缩量达到5~5.5 mm,收缩力不小于3000 N。为简化计算,假定记忆合金均匀收缩,设置离合器分离时间100 s,分离速度为0.062 5 mm/s,设置弹簧的刚度Kh=12.5 N·m。
从图3离合器分离仿真可见,离合器顺利脱开。图4中显示的是离合器与挡盖的间隙,当时间达到80 s时,间隙从6 mm减少到1 mm,实现分离位移5 mm。时间达到96 s时,间隙减小为0 mm,离合器与挡盖接触。
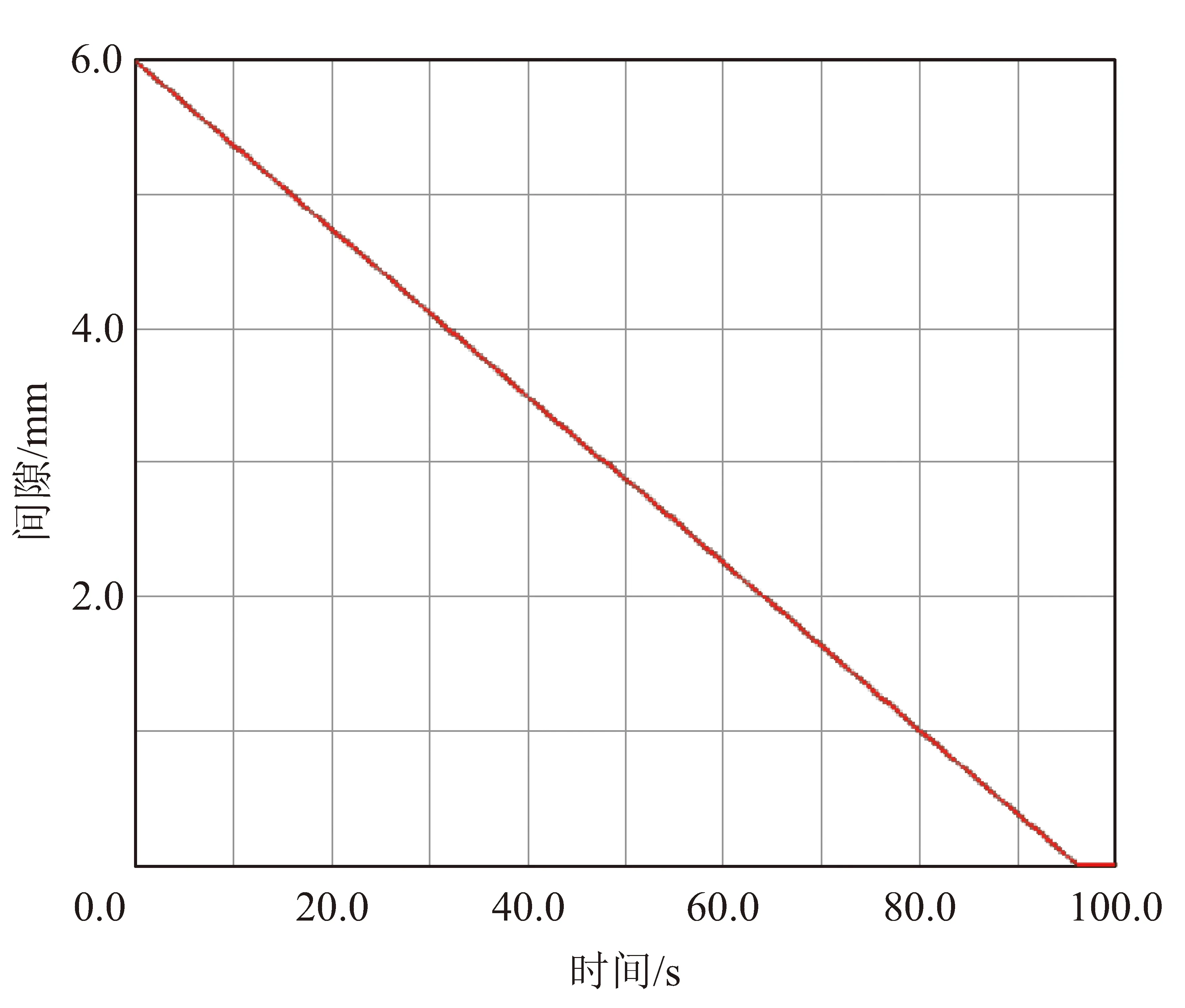
图4 离合器与挡盖的间隙Fig.4 Clearance between the clutch and the shield
3.2 卷簧退出功能仿真
设置卷簧刚度为5.35 N·mm/(°),预紧角度为270°,进行退出功能仿真[10]。图5为负载在卷簧作用下返回安全位置。图6显示经过8 s左右的时间,负载转动60°后,到达预定的退出位置,不再继续转动。

图5 定标机构退出
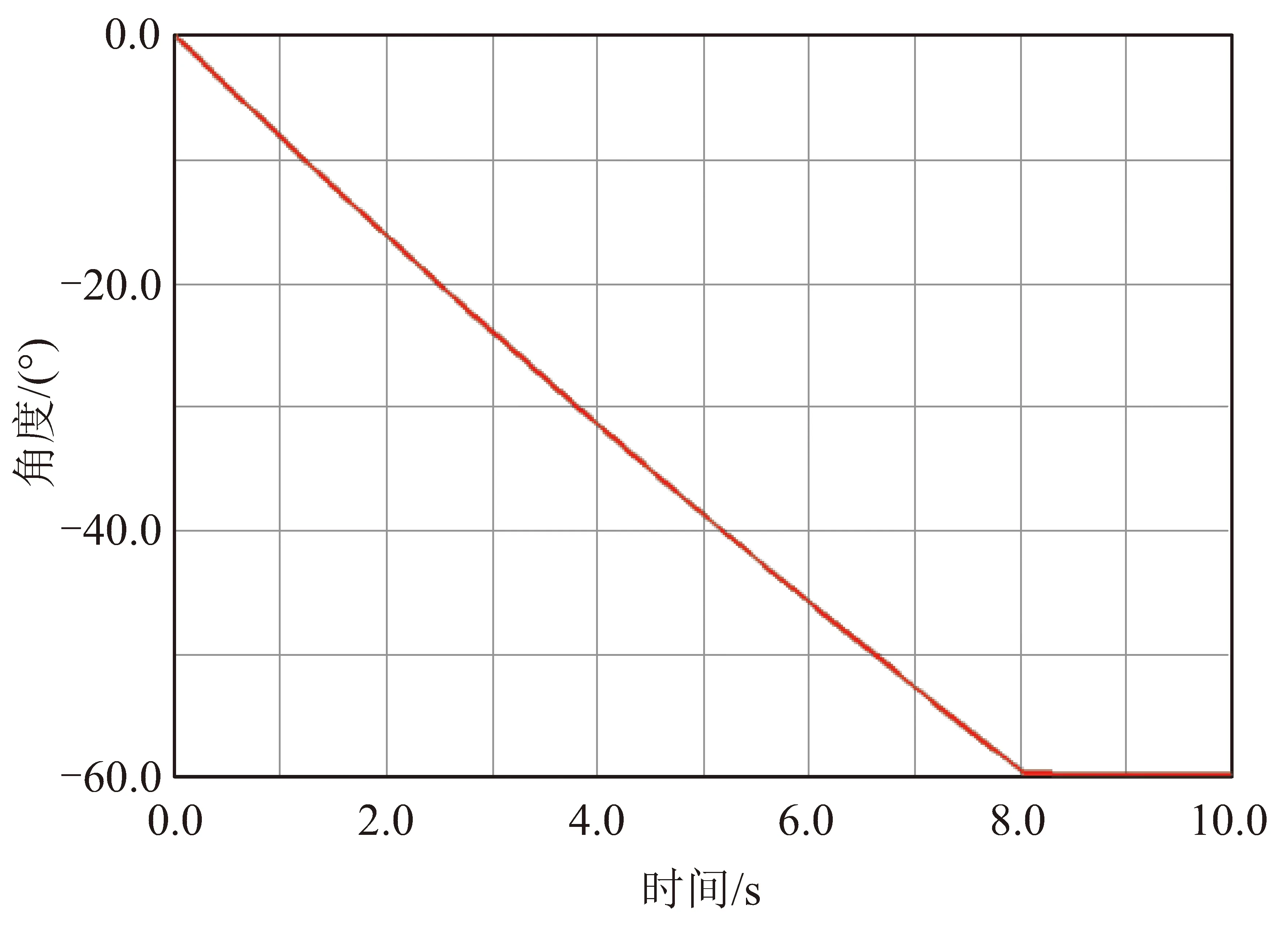
图6 定标机构退出角度Fig.6 Exiting angle of the calibration mechanism
4 测试试验
为了验证定标机构及其退出装置的功能,在(20±5)℃,标准大气压下开展了定标及退出功能测试试验:先给电机及控制电路通电,定标机构正常转动。然后启动退出模式,首先记忆合金驱动器动作,离合器完全分离;接着记忆合金致动器带动挡臂抬起,卷簧放松,驱动负载轴退回到预定的安全位置。试验结果表明,退出装置可以驱动定标机构顺利退回到安全位置。
5 结论
本文针对空间相机定标机构的卡滞故障提出了一种退出装置的设计方案,采用记忆合金驱动器分离离合器连接的齿轮和负载轴,记忆合金致动器触发卷簧工作,进而驱动卡滞负载退出光路。通过仿真及试验对退出功能进行了校验,结果表明:
(1)离合器在记忆合金的驱动下能够正常分离,从而排除电机和控制电路的故障。
(2)卷簧力矩达到电机提供给负载轴力矩的2.3倍,以应对超出电机驱动能力的摩擦力矩。
(3)相比备份相同的电机和齿轮,质量节省了32%。
