智能机器人在公用事业行业的应用初探
2018-09-12厦门大学软件学院臧思远苏晨宇张圣锴
厦门大学软件学院 臧思远 苏晨宇 张圣锴
0 引言
在信息技术、计算机技术持续发展的背景下,人工智能领域已经成为了广泛交叉的前沿学科,无论是理论研究还是实践研究,都取得了较为显著的成果,不仅在自动化方面的应用处于核心的地位,同时也是公用事业智能化的重点目标。
1 公用事业智能化的背景及发展趋势
1.1 国内背景
在城市基础设施中以及城市管理中,水、电、燃气等管网运营及终端服务一直是非常重要的组成部分,其发展经营状况对城市的经济及安全有较大的影响。公用事业不但与国家能源的安全密不可分,而且还具有公益性、需要承担一定的社会责任,因此相关企业的服务质量不但会对自身的利益产生较大的影响,也会直接影响到社会的稳定和政府的形象。所以,基于长远角度来分析,水、电、燃气等公用事业企业构建智能化体系是非常有必要的,在此基础上构建出业务处理效率高、信息共享程度高的系统,以满足当前的实际需求。
1.2 现状与发展趋势
早在上世纪 90年代,国内城市的一些公用事业企业便开始对管理信息系统的研发,经过近 30年的不断努力,截止到目前已经积累了丰富的成果与经验,在信息化水平方面有着明显的突破。管理信息系统所涉及到的内容有信息化办公、营销管理、管网运营管理以及生产管理等,在企业发展的进程中处于重要的地位。各种信息管理及采集、分析、决策系统的应用,不但实现了数据采集效率的提高、服务水平的提升,同时在管理决策方面也具有较大的帮助,进而实现了社会效益、经济效益的提升。
在我国信息化建设持续进行的过程中,水、电、燃气等管网的规划与管理都运用了现代化信息技术,呈现出自动化、科学化、定量化的特征。现阶段,越来越多的公用事业企业将人工智能技术作为核心,在此基础上来实现信息化的全方位、综合性的建设,不断的加大运营监管力度,并尽可能的实现服务水平与效率的提升,这已经成为了各公用事业企业的共同目标。
本文探索的是应用于公用事业企业终端服务领域的智能机器人。
2 智能机器人的发展趋势
在全球信息化持续发展的进程中,机器人产业取得了长足的发展,并且已经成为了衡量一个国家高端制造业水平、国家科技创新的核心指标。尤其是经济发达国家,近年来已经将机器人产业提升到国家战略,以促使国家综合实力的提升。
2013年美国发布的机器人发展路线报告中,明确提出了智能机器人的地位是非常重要的。另外,欧盟也加快了对机器人领域研究,将“SPARC”计划提出后,预计在2020年投入28亿欧元在机器人领域中。同时,日本政府在经济增长战略中,将机器人列为重要分支,期望通过加大对机器人领域的研发力度,来实现本国经济水平的进一步提升。
在国内方面,于上世纪 70年代开始对机器人领域的研究,相对于发达国家来说,即便我国在该领域的研究较晚,但是发展速度是非常快的,主要可以将机器人领域的发展划分为三个阶段。其中,20世纪80年代为初期发展阶段,到达90年代时取得了新的进展,并在 21世纪初期步入到产业化阶段。伴随着该领域的不断发展,我国机器人装机容量在 2010年开始是逐渐增加的,并朝着机器人产业链发展。不难发现,我国机器人技术在近年来已经取得非常显著的成果,对于促进我国人工智能领域的发展具有积极的作用。
3 智能机器人的设计思路与实现算法
3.1 智能机器人的设计思路
对于公用事业服务类的智能机器人,功能主要是:实现自主导航、智能抄表、自动缴费、安全监控和远程维修,这也是公用事业企业服务的终端用户的服务需求。通用软件平台、硬件平台、标准化体系结构,相对专业化应用的模块化组件集成能否构建,将决定智能服务机器人能否被“创建”。
3.2 智能机器人与SLAM算法
在互联网、人工智能不断发展的背景下,陆续出现了送餐机器人、家庭陪伴机器人等,而研究用于公用事业终端客户服务的智能机器人的智能化算法也成为了关注焦点。
首先,在自主定位导航技术方面,SLAM技术处于核心地位,SLAM 是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写,最早由Hugh Durrant-Whyte和John J.Leonard提出。其职责主要是实现地图的创建与机器人的定位。
其次,SLAM技术涉及到众多步骤,并且各个步骤都能够采取不同类型的算法来进行操作。该技术的核心是对机器人在未知环境移动过程中的定位,以及构建地图。
SLAM技术与各领域的关系,如图1所示。

图1 SLAM与各领域关系
总的来说,机器人在描述环境、认识环境阶段,是在地图的基础上来进行操作的。根据地图来对环境信息进行描述,并根据具体的情况,来采用不同类型的传感器与算法。
归纳现阶段各个国家对该方面的研究情况可以发现,表示法一般由三种类型所构成的,分别为拓扑图、几何信息表示以及栅格表示。具体来说,拓扑图具有抽象度高的特征,特别是在环境较大且简单的环境下,拓扑图法能够很好的将地图的具体情况展现出来,在图中不同的节点都代表着环境中的地点、特征状态;几何信息表示法代表的是机器人来对环境的感知信息进行收集,并对更加抽象的几何特征进行提取,具有代表性的有曲线、线段等,借助于几何特征来对环境进行描述;栅格表示法具体是将整体划分为大小相同栅格,并对栅格中是否存在障碍物进行判断。
SLAM的实现方法大致可分为两类:基于概率模型的方法和非概率模型的方法。前者包括基于卡尔曼滤波的完全SLAM、压缩滤波、FastSLAM等,后者则包括SM-SLAM、扫描匹配、数据融合、基于模糊逻辑等。
现阶段,在SLAM技术中运用最多的是卡尔曼滤波器,基于统计学角度可以将SLAM视为滤波问题,卡尔曼滤波器具体的操作是根据0到t时刻的控制信息与观测信息,来对当前的状态进行估计。假设系统的运动模型和观测模型是带高斯噪声的线性模型,系统的状态服从高斯分布,是由状态预测与更新两个环节所构成的,卡尔曼滤波器则是可以完美匹配的。
需注意的是,在对卡尔曼滤波器运用的过程中,假设系统为线性系统,但是机器人实际的观测模型与运动模型全部都是非线性的,则需要借助一阶泰勒来展开近似表示非线性模型。
另一种适用于非线性模型的卡尔曼滤波器是UKF,UKF采用条件高斯分布来近似后验概率分布,相对于前者来说,UKF所具有的优势为具有更高的线性化精度,最重要的是不必对雅可比矩阵进行计算。
3.3 分布式人工智能
在机器人领域不断发展的进程中,对SLAM方面的研究也是持续加深的,尤其是在提升鲁棒性、降低计算复杂度方面具有很好的效果。与此同时,近年来还持续将智能控制、人工智能等相关的方法融入到SLAM领域中,以实现对更加合理、有效的SLAM算法进行研究与开发。
在分布式人工智能领域研究的过程中,主要是将相互协作的、并行的求解问题作为核心,采用由自底向上、自顶向下两种方法来对解决问题。其中,自底向上是基于主体的方法,而自顶向下则是分布式问题求解。需注意的是,分布式人工智能系统中的控制、知识以及数据,无论是在物理上,还是在逻辑上都是分布的。借助于互联网来实现各个求解机构的连接,因此在求解问题时所花费的代价是相对较低的。总的来说,分布式人工智能可以实现各个求解主体间的相互协作,能够快速的解决较为困难的问题与任务,同时在问题求解效率的提升方面也具有很好的作用。在上世纪 90年代,当时学者主要是将多主体系统作为核心,主要研究的内容是智能主体间的协调,可以是实现不同主体的不同目标,也可以是实现各个分支的共同目标,通过协作的方式来对问题进行求解。
在人工智能领域中,智能主体处于核心地位。对此,学者Hayes-Roth在IJCAI'95的特邀报告中谈到:“智能的计算机主体不但是人工智能的初级目标,也是终极目标。”总之,基于主体的计算,将会成为智能服务机器人领域未来阶段的重要发展方向。
公用事业服务机器人能够集成多方面的功能。机器人系统能够处理视频、语音以至于温度等外界信息,与传统的信息监控工作相比,智能化机器人可以集多项技术于一身。比如机器人在承担保安的工作的同时,还能建立完整的监控体系,从而大幅提高整个安防体系的安全性。
公用事业服务机器人通过分布式多主体系统进行程序控制行为,完全不会心理状态不佳的情况,从而实际操作中比人工的准确性更高。总的来说,公用事业企业加强对服务机器人的运用,对于事故发生率的大幅度降低具有很好的效果,尤其是在保障人类生命安全方面具有积极的作用。
通过分布式人工智能解决了通信过程中的代价问题,公用事业服务机器人相较于传统的工作效率更高,在时间工作中更少出现失误情况,能够帮助企业大幅降低人工成本。
3.4 智能机器的学习
对于智能机器学习其涉及到的方法类型是相对较多的。基于认知科学的层面,可以将智能机器学习划分为类比学习系统、归纳学习系统以及演绎学习系统等。
(1)归纳学习系统,该系统属于推理学习系统的一种,归纳是由不完全归纳与完全归纳两种类型所构成的。在不完全归纳系统中,是由因果关系归纳与简单枚举归纳所构成的。其中,因果关系归纳也被称为“科学归纳法”,是指将事物因果关系作为核心,来对所有对象都具有某种属性;
(2)演绎学习系统,此系统是运用推理定理法则、公理系统来对相关的结果进行推理,具有代表性的有模态逻辑推理、三段论推理等;
(3)类比学习系统,通常也被称为模仿系统,属于从特殊到特殊的一种推理与学习系统。首先需要对一般规律进行寻求,然后将其联系到新的事例当中,可以将其视为创作性的推理与学习。
在对学习模型工作建立的过程中,其优势主要体现在两个方面:其一,有助于促进公用事业服务机器人更加智能,可以更加完美的来提供相应的服务;其二,能够更加深入的来认识与了解人类的学习过程,在促进智力开发方面具有不可小视的作用。在持续对不同类型人工智能系统研究的过程中,了解到目前人工智能系统的智能水平处于高级阶段。举例来说,尤其是自动编程系统被开发成功,对于促进计算机程序设计来说是相当重要的,而拥有学习功能的公用事业服务智能机器人系统在实践的过程中,其水平也是处于不断增加的状态。对此,基于H.Simon的学习定义角度,来对简单的学习模型进行构建,具体见图2。

图2 学习系统的基本结构
该图表示学习系统的基本结构。环境向系统的学习部分提供某些信息;学习分支则是运用相关的信息来对知识库进行修改,以实现任务完成效能的提升;而执行分支则是将知识库中所完成的任务作为核心,并将得到的相关信息反馈到学习分支。总的来说,在学习系统具体操作的过程中,执行、知识库、学习以及环境都起到决定性的作用。
在计算机科学体系持续发展的进程中,智能服务机器人与人工智能领域想要实现更好、更快的发展,加强思维学研究则是非常有必要的,也就是说在创造性思维工作上需要由机器来完成,经过对大量知识的输入后,能够不断的来对经验进行总结与归纳,并发现出新的领域与成果。
3.5 智能决策与调度
为了使服务机器人能够基于用户的安全状态改变当前的谈话内容,从而达到更好的安全防护目的,智能机器人使用一个LSTM模型,见图3。通过用户基本信息以及当前用户安全状态,做出当前机器人的行为决策,如预警处理、安全动作的选择;而预测机器人回应的安全状态,在对基于情感的决策系统的构建方面具有很大的作用。
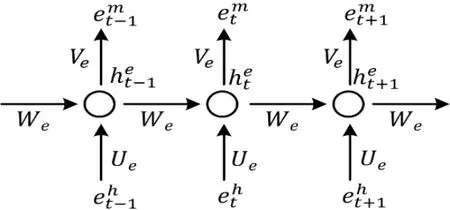
图3 LSTM模型
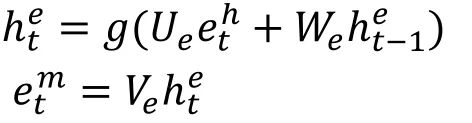
公用事业服务机器人使用基于序列生成的编码—解码框架来构建调度系统。编码器对一句输入语境进行编码,解码器利用该编码输出决策语句。
从x1到xTχ是由用户安全环境解析得到的向量,分别为RNN正向和反向计算的隐层值。
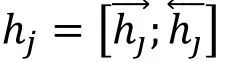
计算解码器隐层:
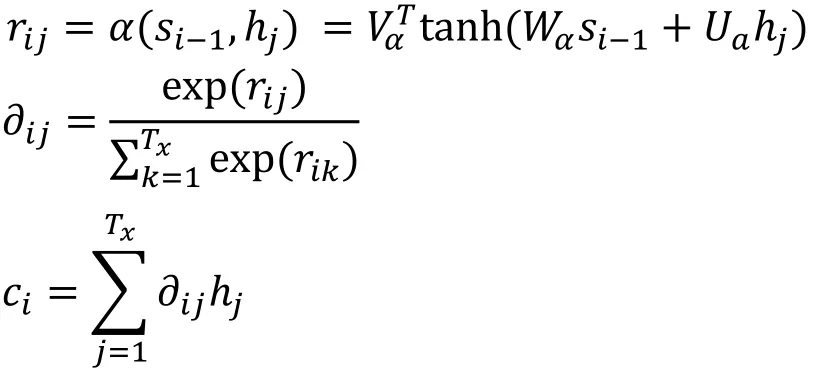
初始化解码器隐层值:

说明:i表示解码器当前输出的第i个状态特征,t表示读取用户安全状态的第t个时帧。
控制用户环境状态:

更新解码器隐层值:

输出门,控制生成决策为安全决策还是通用决策的比率:

生成词在通用词表和情感词表中的概率分布:

总概率分:

损失函数:

编码—解码框架见图4编码—解码框架见图4。
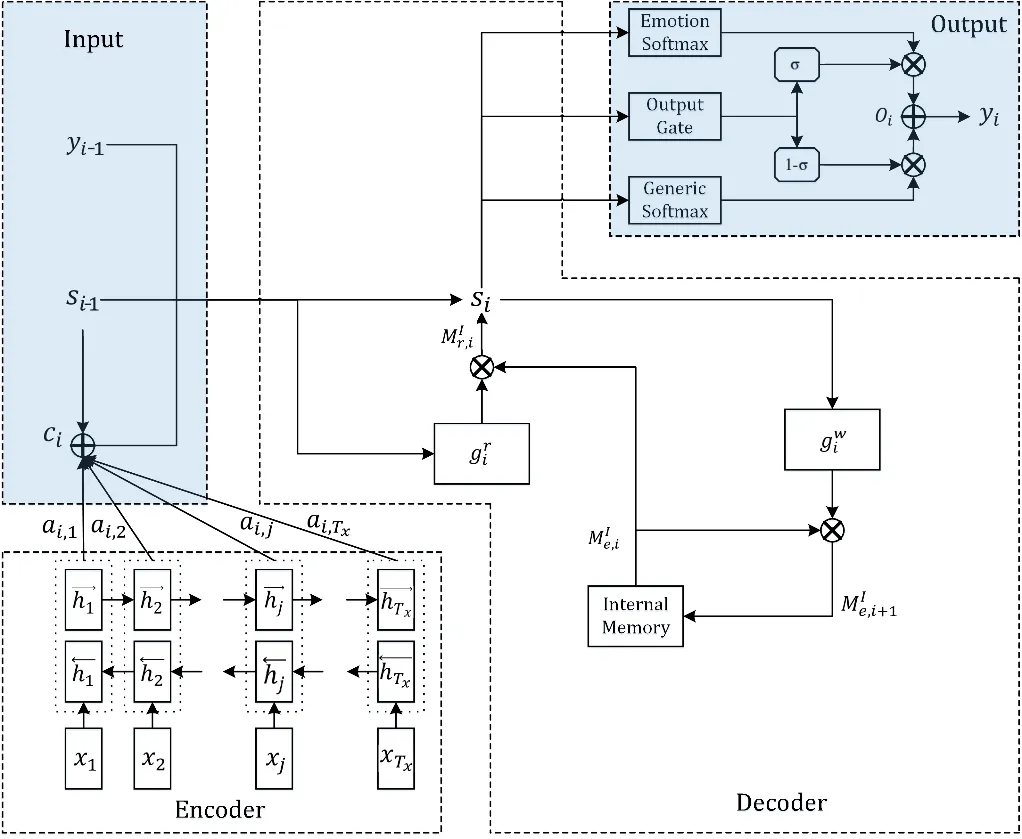
图4 编码—解码框架
4 结语
无论是从公用事业智能化在国内外的快速发展,还是从智能机器人产业与日俱增的地位来看,在公用事业行业应用智能机器人已经是大势所趋。在未来,即使是一个普通的家庭,智能机器人也将成为基本的需求。要开发具有一定智能水平、并为人们提供多种服务的智能机器人,需要探索人类智能的工作原理,这涉及到人工智能学科相当多的算法与概念,如分布式人工智能、机器学习、智能决策与调度等。本文仅仅是对智能机器人在公用事业行业应用的初步探索,探讨了构成智能机器人的最基本的算法,但是对于机器人的更为细致的整体方案、设计思路、功能响应以及系统安全等方面更深入的探索,还有赖于相关领域的进一步发展。
