永磁同步电动机转矩脉动抑制方法
2018-09-04程松辽陆永耕江泽昌袁红杰贾竹青
程松辽, 陆永耕, 江泽昌, 袁红杰, 贾竹青
(上海电机学院 电气学院, 上海 201306)
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)因其具有输出功率高并且工作性能良好的优点,现已在各行各业得到广泛应用[1]。直接转矩控制(Direct Torque Control, DTC)理论提出得较晚,它相比于矢量控制有一些明显的优势。DTC坐标变换简单,可以对转矩进行直接控制,具有易于实施,系统响应速度快等优点。但传统的DTC也存在一些缺点,如转矩脉动大,耗损增加等[2]。
为了改善系统的缺陷,文献[3-4]把零矢量引入到传统的DTC中。运用Matlab软件进行了仿真分析。仿真结果表明,在PMSM低速运行时零矢量对转矩几乎没有影响,转矩几乎不变,但是当PMSM工作在较高的速度时,零矢量会优化输出转矩。
滑模控制(Sliding Mode Control,SMC)实质是一种非线性的控制方法[5-9]。滑动模态因为其本身的特征,能够使SMC的响应速度快并且具有抗外界的扰动性强等优点[10]。同时SMC也存在抖振的问题,这使它在电力方面的应用受到了限制。但是高阶的SMC可以使滑模集S能够在有限的时间内收敛, 从而在一定程度上有效消除传统SMC抖振的问题[11],使得这种高阶的SMC的控制性能良好。
文献[12-14]二阶滑模控制主要应用在磁链观测器和控制器上。文献[15]在基于空间矢量调制的直接转矩控制中引入了二阶滑模控制器,用它将其中仅有的两个PI控制器进行了替换,使系统响应时间变短并且减小了转矩脉动。
本文将零矢量引入到含有滞环比较器的传统控制框图中来减少转矩脉动。为了更进一步优化控制系统,减小转矩脉动以及提高速度的响应特性,先用双曲正切函数h(s)代替符号函数sgn(s)对二阶滑模控制器进行改进,然后再用其替换滞环控制框图中仅有的PI控制器。
1 PMSM直接转矩控制的基本理论
PMSM在α-β静止坐标系下的电压方程为
(1)
式中:Rs为定子电阻,Ω;uα,uβ为定子电压在α和β轴的分量,V;iα,iβ为定子电流在α和β轴的分量,A;ψα,ψβ为定子磁链在α和β轴的分量,Wb。
磁链方程为
(2)
式中:Ls为隐极式PMSM电感,mH;ψf为永磁体磁链,Wb;θe为转子位置角,(°)。
电磁转矩方程为
(3)
式中:Te为电磁转矩,N·m;pn为电动机的极对数。
运动方程为
Te-TL-Bωr=Jdωr/dt
(4)
式中:TL为负载转矩,N·m;ωr为转子速度,rad/s;B为摩擦系数;J为转动惯量,kg·m2。
PMSM在d-q坐标系下的电压方程为
(5)
式中:ud,uq分别为定子电压在d和q轴上的分量,V;id,iq分别为定子电流在d和q轴上的分量,A;ψd,ψq为定子磁链在d和q轴上的分量,Wb。
磁链方程为
(6)
式中:Ld,Lq分别为电感在d和q轴上的分量,mH。
隐极式PMSM满足
Ld=Lq=Ls
(7)
电磁转矩方程为
(8)
2 含零矢量DTC
2.1 含零矢量DTC原理
当引入零矢量时,转矩的变量为
(9)
式中:Ts为控制周期,μs;ψs为定子磁链,Wb;δ为转矩角,(°)。
从式(9)可知,在引入零矢量后,转矩减小。当PMSM的ωr很小时,因为系统的控制周期只有几十μs,所以ωrTs就趋近于0,那么ΔTe也几乎为0,零矢量不会对转矩的输出产生影响。PMSM的ωr明显变大时,ωrTs就比较大,所以看出ΔTe<0,零矢量在这里使转矩的效果变好。随着PMSM的ωr变大,零矢量优化输出Te的效果就越显著。

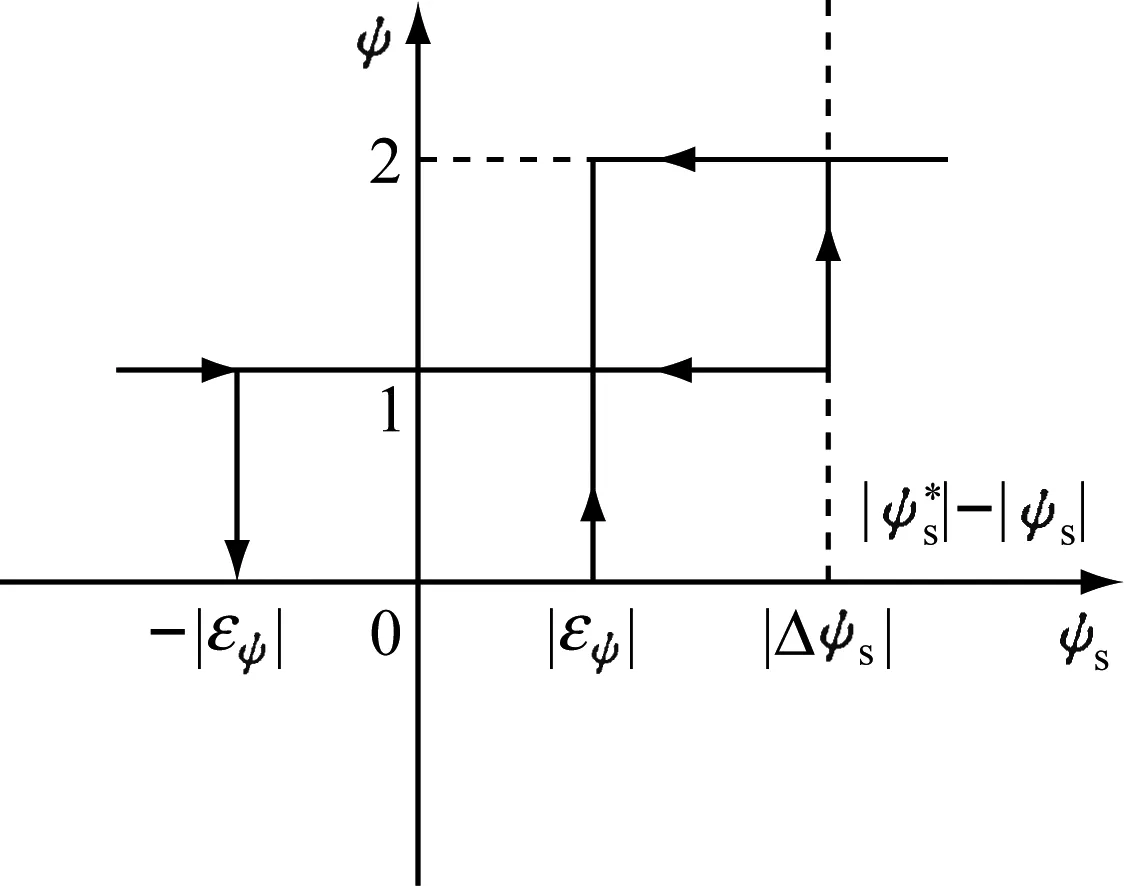
图1 磁链双层滞环结构图

图2 转矩双层滞环结构图
结合图1和图2,确定各个扇区不同情况下的开关矢量作用顺序,得到空间电压矢量图(见图3)和含零矢量DTC开关表(见表1)。θ1~θ6分别为图3中6个扇区编号。
2.2 对比仿真
为了验证将零矢量引入到DTC能起到优化控制系统,提高系统的控制性能,本文运用Matlab软件进行了仿真。将零矢量DTC和传统DTC进行对比。在仿真中使用的参数如表2所示。PMSM的额定转速设为600 r/min,起始负载转矩为0 N·m,0.2 s时负载从0 N·m突变为1.5 N·m。仿真条件设置为:直流侧电压UDC=311 V,采用变步长ode23tb算法,仿真时间为0.4 s。

图3 空间电压矢量图

ψτθ1θ2θ3θ4θ5θ611u6u2u3u1u5u40u7u0u7u0u7u0-1u7u0u7u0u7u0-2u5u4u6u2u3u101u2u3u1u5u4u60u0u7u0u7u0u7-1u0u7u0u7u0u7-2u1u5u4u6u2u321u6u2u3u1u5u40u4u6u2u3u1u5-1u4u6u2u3u1u5-2u5u4u6u2u3u1

表2 PMSM参数
传统PI控制器的转速、转矩波形如图4所示。基于零矢量的转速、转矩波形如图5所示。图4和图5中的小图均为其局部放大图。由图4(a)和图5(a)可见,含有零矢量的PMSM的DTC比传统的PMSM的DTC的动态响应速度快。由图4、图5还可见,传统的DTC的转速波形超调大,动态响应时间慢,在约0.10 s才稳定到给定值,而含有零矢量的DTC的转速波形超调变小,同时响应速度快,在0.06 s就稳定到了给定值。使用零矢量的DTC和传统的DTC相比,转矩输出效果明显变好,二者的转矩响应如图4(b)和图5(b)所示。从仿真波形可以看出传统的DTC的转矩波形在系统稳定之后波动范围为1.30~1.72 N·m,转矩脉动为0.42 N·m;而使用零矢量的DTC的转矩在稳定状态下的波动范围为1.37~1.64 N·m,转矩脉动为0.27 N·m,其转矩脉动明显小于传统DTC的转矩脉动。转矩脉动越小,表明控制性能越良好。

(a) 转速响应波形

(b) 转矩响应波形
(a) 转速响应波形

(b) 转矩响应波形
3 二阶滑模控制器设计
为进一步减小含有零矢量的DTC的转矩脉动,本文设计一种二阶滑模控制器代替PI控制器,同时用双曲正切函数h(s)代替符号函数sgn(s),增强了系统的鲁棒性。
3.1 Super-twisting 控制原理
对于所有单输入非线性系统

(10)
式中:x为状态变量,x∈Rn;u为控制系统的输入变量,u∈R;y为控制系统的输出;σ(t,x)为输出函数,称为滑模变量;a(t,x),b(t,x)为连续的未知函数。
控制目的是让系统能够在短时间内到达滑模面σ(t,x)=0。对σ(t,x)进行二阶求导,可得

(11)

f(t,x)和g(t,x)为不确定函数, 存在正数C,Km,KM,使得∀u,∀x,有
(12)
设式(12)在所有的范围内都满足,则
(13)

因此,问题变为寻找一个反馈

(14)


Super-twisting算法的控制律设计如下式所示:
(15)
式中:KP和KI为正增益,取值范围由
(16)
决定。
若式(10)的条件满足式(12),与此同时式(15)满足式(16)条件,能够使Super-twisting滑模(Super-twisting Slidng Mode, STSM)控制结构在较短的时间收敛。
3.2 Super-twisting控制器设计
PMSM转子动力学方程为
(17)
假设ψs恒定,由式(17)可推导出转速的二阶导数为
(18)
式(18)中转速、转动惯量和负载转矩都是有界的,因此式(18)满足式(12)。Super-twisting转速控制器可设计为
(19)
(20)
式中:sω为转速误差,sω=ω*-ω;KP,KI为正增益,满足式(16)的条件。
为了使控制性能更好,将符号函数sgn(s)用双曲正切函数h(s)代替,即
(21)
式中:a为可调参数,调整a的值,可以改变双曲正切函数在原点处的斜率。
优化后的Super-twisting转速控制器为
(22)
根据式(22)设计的Super-twisting转速控制器如图6所示。

图6 Super-twisting转速控制器
将STSM转速控制器应用于基于零矢量的PMSM的DTC中去得到控制框图(见图7)。
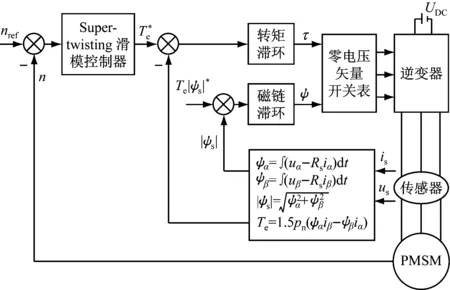
图7 基于STSM转速控制器的含零矢量DTC框图
4 仿真及结果分析
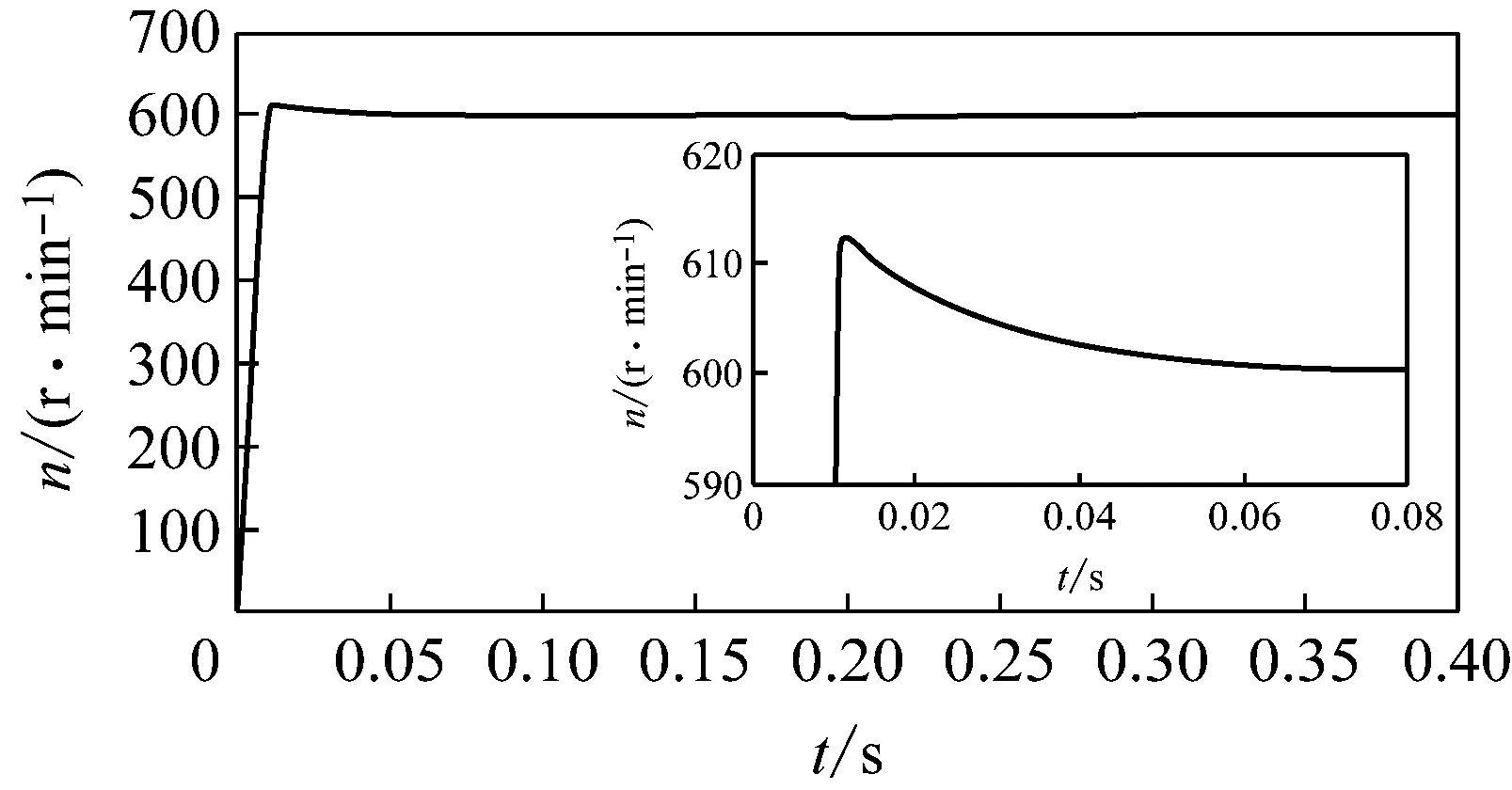
在这里使用上文设置的PMSM参数。起始负载转矩为0 N·m,0.2 s时负载从0 N·m突变为1.5 N·m。仿真时间为0.4 s。根据Matlab/Simulink软件的仿真结果,分析了基于STSM转速控制器的零矢量DTC的电磁转矩波形和转速波形(见图8),并与仅含有零矢量的DTC仿真波形(见图5)进行对比。图8中的小图为其局部放大图。
从图5(a)和图8(a)可知,基于STSM的零矢量DTC比基于零矢量的PMSM的DTC的动态响应速度快。基于零矢量的DTC的转速波形超调略大,动态响应时间略慢,在约60 ms才稳定到给定值。而含有STSM转速控制器的DTC的转速波形超调明显减小,且动态响应时间极快。在约5 ms就稳定到了给定值。使用了STSM转速控制器的DTC和只使用零矢量的DTC相比有着更小的转矩脉动,二者的转矩响应波形如图5(b)和图8(b)所示。从仿真的波形可以看出,基于零矢量的PMSM的DTC在系统稳定之后波动的范围为1.37~1.64 N·m,转矩脉动为0.27 N·m,而使用STSM转速控制器的零矢量DTC的转矩在稳定状态下的波动范围为1.4~1.6 N·m,转矩脉动为0.2 N·m。

(a) 转速响应波形
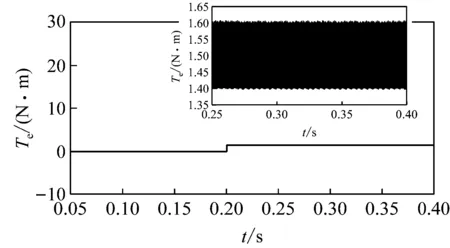
(b) 转矩响应波形
5 结 语
本文设计了一种基于STSM转速控制器的PMSM含零矢量DTC。通过合理的使用零矢量,基于零矢量的DTC相比于传统的DTC,转矩脉动抑制效果显著提升,与此同时转速的超调变小并且其响应速度变快。PMSM是一个非线性的系统,在系统运行时,传统的PID在遇到很多情况时,控制效果并不理想。为了让系统运行效果更好,将改进后的STSM转速控制器用于含零矢量DTC当中。由仿真可知,这种含有STSM转速控制器的零矢量DTC,使系统超调更小,响应时间短,进一步减小了转矩脉动,提高了系统的控制性能。
