基于压缩感知的波束域DOA估计
2018-08-17房云飞王洪雁裴炳南
房云飞, 王洪雁, 裴炳南
(大连大学, a.辽宁省北斗高精度位置服务技术工程实验室;b.大连市环境感知与智能控制重点实验室,辽宁 大连 116622)
0 引言
波达方向(Direction of Arrival,DOA)估计是阵列信号处理中的重要研究内容之一,在雷达、声纳、移动通信、无线传感器网络等领域得到广泛应用[1-3]。自20世纪60年代以来,研究者们提出了大量有效的DOA估计算法,主要有最小方差谱估计法[4](Minimum Variance Distortionless Response,MVDR)和以多重信号分类(Mu-ltiple Signal Classification,MUSIC)为代表的子空间算法[5]。上述DOA估计算法皆基于如下假设:信源不相关、快拍数量足够多,且信噪比(Signal Noise Ratio,SNR)足够大。若快拍数量少、信噪比较低,这些算法性能将明显下降,尤其在信源相关情况下,由于信号协方差矩阵会出现秩亏现象,这些算法估计精确度更低。
近年来,信号处理领域中提出的压缩感知(Compressing Sensing,CS)理论[6-7]吸引了研究人员的极大关注,已广泛应用于图像处理和无线通信等诸多领域。针对阵列DOA估计运算量较大的问题,基于CS理论,LIANG等利用目标空域稀疏特性[8],提出一种稀疏恢复l1-SVD算法[9]。在已知信源数量条件下,即使信源信号相关,该算法都将得到DOA的高精度估计。然而,在没有信源数量先验信息的情况下,该算法性能会明显下降。针对此问题,COTTER把多快拍和匹配追踪算法(MP)相结合,提高了DOA估计性能[10]。为进一步提高DOA估计的分辨率和精确度,GORODNITSKY和RAO提出把欠定系统聚焦求解(Focal Underdetermined System Solver,FOCUSS)算法和lp惩罚函数结合对DOA进行估计,其中,p<1[11]。此外,为了避免接收信号协方差矩阵求解产生奇异值的缺陷,文献[12]提出一种通过迭代和阈值转换的DOA估计方法。文献[13]则采用奇异值分解欠定系统聚焦求解(Singular Value Decomposition-Regularized Multi-vector Focal Undetermined System Solver,SVD-RMFOCUSS)算法实现DOA高分辨率估计,然而由于此算法基于阵元域,导致SVD-RMFOCUSS算法计算复杂度比较高。文献[14]基于波束域采用Dantzig Selector算法实现DOA估计,降低了算法的计算复杂度。然而,Dantzig Selector算法的DOA估计谱峰较宽,不利于角度高分辨。
针对上述问题,本文提出一种基于波束域的多测量矢量欠定系统正则化聚焦求解(BS-RMFOCUSS)算法。该算法利用目标信号空域稀疏特性,基于压缩感知理论,采用随机阵列对空域稀疏信号进行压缩采样,然后将接收压缩信号从阵元域映射到波束域,得到波束空间的接收信号数据矩阵[15-16],随后采用性能较好的RMFOCUSS算法[17]进行DOA估计。与多测量矢量欠定系统聚焦求解算法(Multi-vector Focal Undetermined System Solver,MFOCUSS)、多测量矢量欠定系统正则化聚焦求解算法(Regularized Multi-vector Focal Undetermined System Solver,RMFOCUSS)相比,BS-RMFOCUSS算法在低信噪比条件下也可获得较高角度分辨率,且具有较低计算复杂度;与传统CAPON,MUSIC和l1-SVD算法相比,所提算法能够对相关信号进行有效估计,且具有更高的角度分辨力及更优的角度估计性能。
1 稀疏波达方向角估计模型
(1)
式中:a(θk)=[1,exp(-jα),…,exp(-j(M-1)α)]T表示来波方向θk的M×1维阵列导向矢量,α=2πd·sin(θk)/λ表示均匀线性阵列平面内各阵元之间的第k条信号到达此阵元时的相移;w(t)表示叠加在阵列接收回波中的M×1维矢量噪声信号。
为了便于推导,式(1)可重新表示为
x(t)=As(t)+w(t)
(2)
式中:A=[a(θ1),a(θ2),…,a(θk)]是阵列流型矩阵;s(t)=[s1(t),s2(t),…,sk(t)]T是K×1维信号矢量。

由上述分析可得过完备阵列流型矩阵,即过完备稀疏基,则每个可能来波信号对应的导向矢量可表示为

(3)
定义NS×1信号稀疏矢量

(4)
基于式(3)和式(4),式(2)可重新表示为
x(t)=Ψz(t)+w(t)
(5)
由此,将接收信号x(t)投影至投影测量矩阵Φ,可得
y(t)=Φx(t)=ΦΨz(t)+Φw(t)
(6)
对于多次快拍(数量为N),上式可表示为
Y(t)=ΦX(t)=ΦΨΖ(t)+ΦW(t)=ΘZ(t)+ΦW(t)
(7)
由式(7)可知,上述算法基于阵元域建立接收信号模型,在采用稀疏重构算法实现DOA估计的同时,也会导致算法计算量大、估计稳定性差等问题,实施性比较差。
2 波束域RMFOCUSS重构算法
为进一步提高DOA估计的精确度和稳健性,降低DOA估计算法的运算复杂度,本文提出一种波束域欠定系统聚焦求解(BS-RMFOCUSS)算法,通过波束转换矩阵T将阵列接收到的信号从阵元域映射到波束域,即
yB(t)=THΦx(t)=ΦBΨz(t)+ΦBw(t)
(8)
式中:T为M×NB的波束形成矩阵,满足THT=INB,NB为波束数量;ΦB=THΦ。由文献[18]可知,T可表示为
(9)
式中,m为波束形成矩阵的始端点。
对于多次快拍,式(8)可重写为
YB(t)=THΦX(t)=ΦBΨZ(t)+ΦBW(t)=ΘZ(t)+ΦBW(t)
(10)
式中,Θ=ΦBΨ表示波束域下的感知矩阵。
由式(10)可知,矩阵Z(t)行支撑集可表示为
supp (Z)={i|∃js.t.Z(i,j)≠0,i∈[1,…,M]}
(11)
式中:supp (·)表示一个确定矩阵的支撑集;Z(i,j)表示矩阵Z的第(i,j)个元素。
由式(4)可知,Z(t)具有矩阵稀疏特性,故Z(t)行的稀疏性可用其矩阵中非零行个数表示,即
‖Z‖0= |supp (Z)|
(12)
式中:‖·‖0表示一个已知矩阵非零行个数;|·|表示一个确知集合的势。
基于式(12),式(10)优化问题可建模为
min‖Z‖0
(13)
s.t. ‖YB-ΘΖ‖F≤ε
式中:‖·‖F表示Frobenius范数;ε表示误差常数,通常取ε=0.01。
考虑式(13)优化问题求解是一个NP-Hard问题,可将上述优化问题目标函数等价松弛[17]为
‖Z‖0~‖Z‖p,q
(14)
基于式(13)及式(14),上述优化问题可进一步表示为
min ‖Z‖p,q
(15)
s.t. ‖YB-ΘΖ‖F≤ε
式(15)优化问题可采用拉格朗日乘子法进行求解[11],即

(16)
式中,γ为平衡估计误差与稀疏性的参数,可根据修正l曲线法[19]预先选取最优γ值,其在一定信噪比范围内变化较小。
式(16)可通过DOA近似重构算法实现求解,本文通过RMFOCUSS算法对优化模型即式(16)中的稀疏信号Z进行估计,具体实现步骤描述如下:

3) 信号矢量Zk+1=Wk+1Qk+1;
4) 若‖Zk+1-Zk‖F/‖Zk‖F<ε,算法迭代终止。
由上可得信号Z的近似稀疏逼近,进一步可得空域信号谱估计公式,即
P(θi)=‖Z(i,:)‖F。
(17)
3 实验仿真及分析
基于非相干、相干信号及远近目标模型,本节通过与传统的CAPON算法、MUSIC算法、l1-SVD算法进行对比,验证BS-RMFOCUSS算法的有效性。仿真条件如下:均匀线性阵列阵元个数M=12,信号快拍数为N=50;从-180°到180°,以1°为间隔将目标角度空间划分为361°,即网格划分数量为361个;考虑到目标角度范围,波束数NB=8。目标信号采用零均值、方差为1的复高斯随机信号,目标信号与加性复高斯噪声互不相关。采用均方根误差作为算法性能指标,其中均方根误差定义为
(18)
式中,J为蒙特卡罗试验次数。
实验1 考虑两个入射角度分别为10°和15°的非相干信号,信噪比为10 dB,进行20次独立蒙特卡罗实验。图1为分别采用CAPON算法、MUSIC算法、l1-SVD算法和BS-RMFOCUSS算法的空域谱估计输出对比。从图1可以看出,当两个非相干信号角度间隔为5°时,各算法均能正确分辨出两个目标角度,且具有相近的估计性能,需要注意的是,所提算法比CAPON算法、MUSIC算法、l1-SVD算法空域谱估计输出具有更窄的主峰和更低的旁瓣,因而具有更好的角度分辨力及估计精度。
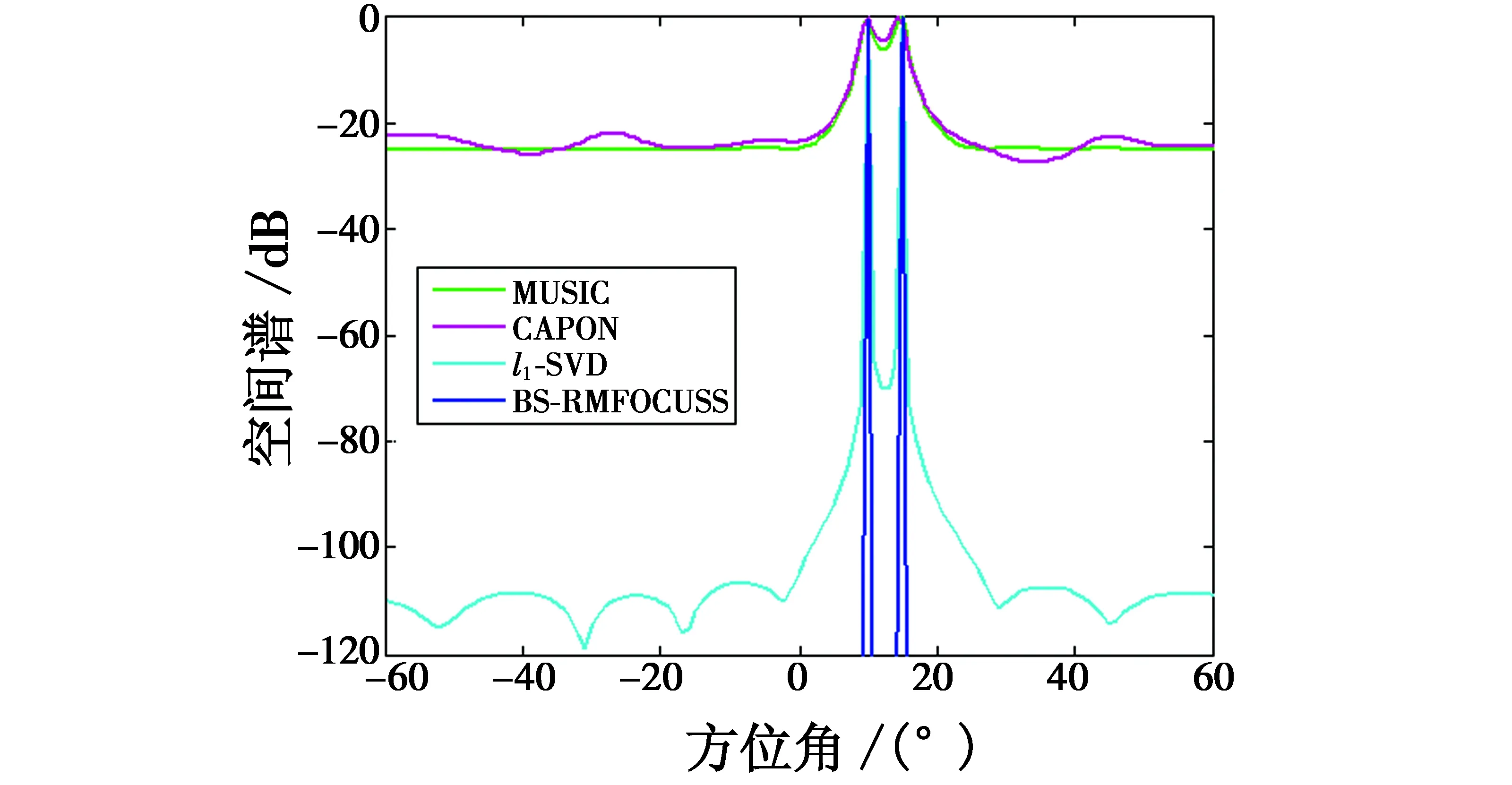
图1 10 dB时的非相干信号的空域谱估计
Fig.1 Spatial spectra estimation of noncoherent signals(10 dB)
实验2 考虑两个入射角度分别为10°和12°的邻近非相干信号,信噪比为10 dB,进行20次独立蒙特卡罗实验。图2为分别采用CAPON算法、MUSIC算法、l1-SVD算法和BS-RMFOCUSS算法的空域谱估计输出对比。从图2可知,当两个邻近非相干信号角度间隔为2°时,所提算法和l1-SVD算法能够对邻近目标实现有效估计,而CAPON算法和MUSIC算法无法分辨两个邻近信号。此外,从图2还可看出,与l1-SVD算法相比,所提算法具有更窄的主瓣和更低的旁瓣。图2表明,在波束域下,所提算法同样具有更高的分辨能力。
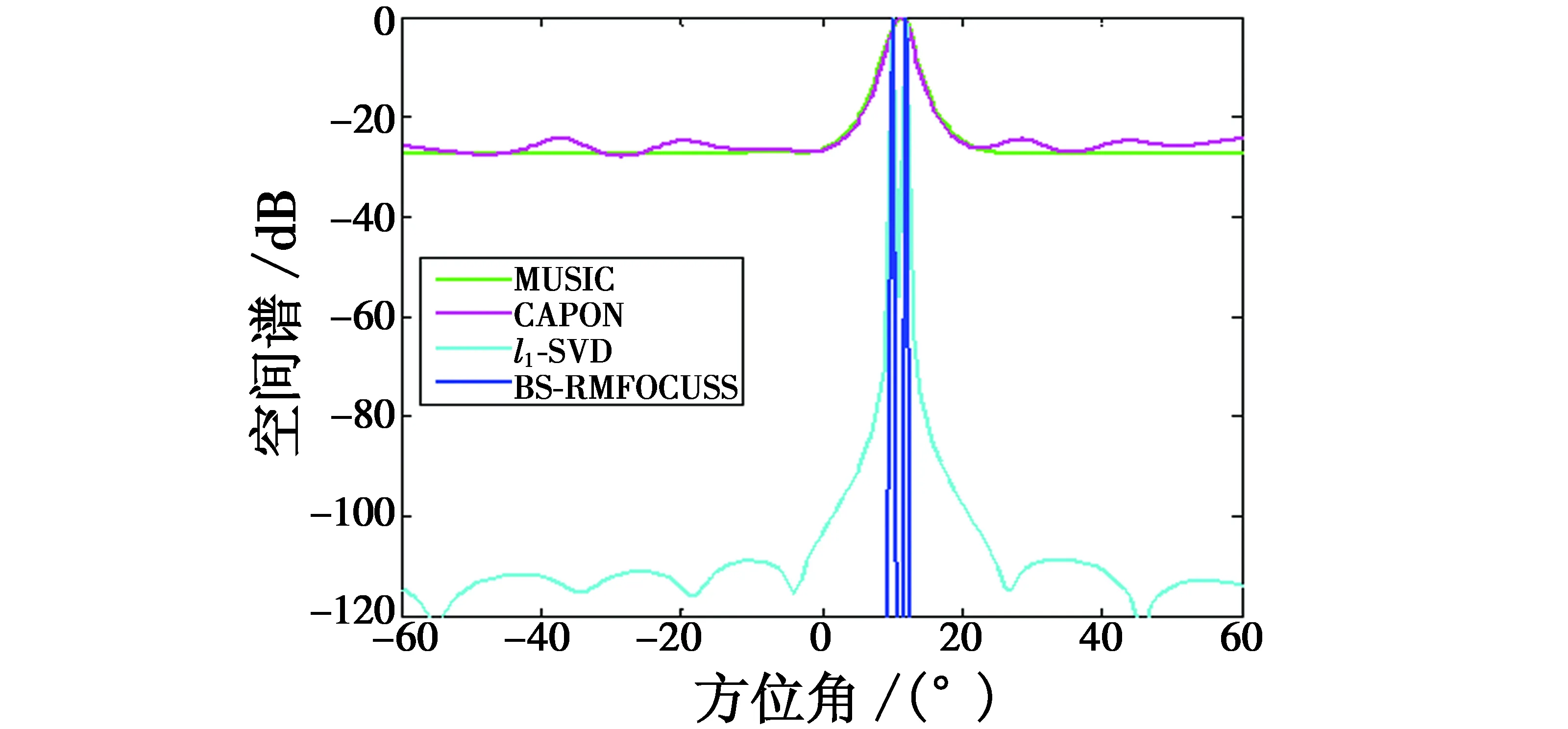
图2 邻近非相干信号的空域谱估计
实验3 考虑两个入射角度分别为10°和15°的非相干信号,信噪比为-10 dB,进行20次独立蒙特卡罗实验。图3为分别采用CAPON算法、MUSIC算法、l1-SVD算法和BS-RMFOCUSS算法的空域谱估计输出对比。从图3可以看出,在低信噪比条件下,仅有BS-RMFOCUSS算法能够成功分辨两个信号,而CAPON算法、MUSIC算法和l1-SVD算法只呈现出一个误估的谱峰,无法分辨两个信号。图3表明所提算法在低信噪比的情况下同样具有较好的分辨能力。

图3 -10 dB时的非相干信号的空域谱估计
实验4 考虑两个入射角度分别为10°和15°的非相干信号,信噪比为10 dB,进行100次独立蒙特卡罗实验。图4为分别采用CAPON算法、MUSIC算法、l1-SVD算法和BS-RMFOCUSS算法的DOA估计均方根误差随信噪比变化关系曲线。从图4可以看出,所提算法在低信噪比条件下的均方根误差曲线明显低于CAPON算法、MUSIC算法和l1-SVD算法,且随着信噪比的增大,各算法的均方根误差曲线均趋向于平稳状态。图4表明,低信噪比条件下,所提算法具有较高的角度估计精度。

图4 非相干信号DOA估计均方根误差随信噪比的变化曲线
实验5 考虑两个入射角度分别为10°和20°的相干信号,信噪比为10 dB,进行20次独立蒙特卡罗实验。图5为分别采用CAPON算法、MUSIC算法、l1-SVD算法和BS-RMFOCUSS算法的空域谱估计输出对比。从图5可以看出,CAPON算法和MUSIC算法在相干信号情况下,不能对两个相干信号进行精确有效的估计,且两种算法的旁瓣相对较高,而所提算法和l1-SVD算法可正确辨识两个相干信号。此外,需要说明的是,相干信号条件下,所提算法比l1-SVD算法具有更窄的主峰和更低的旁瓣。图5表明所提算法在信号相干的情况下同样具有较高的角度估计精度和较好的角度分辨能力。

图5 相干信号的空域谱估计Fig.5 Spatial spectral estimation of coherent signals
实验6 为进一步验证所提算法在算法复杂度上的优势,本文与基于阵元域的RMFOCUSS算法和l1-SVD算法进行对比,如图6所示。考虑到实际情况,l1-SVD算法复杂度近似为Ο(2MS2+MLS2+KS2),基于阵元域RMFOCUSS算法复杂度近似为Ο(2MS2+MLS2+M3(M-1)(M-2)),BS-RMFOCUSS算法复杂度近似为Ο(2MS2+MLS2+2NML+N3(N-1)(N-2)),其中,M为阵元数,K为信源数,S为稀疏字典个数,L为快拍数,N为波束数。实验仿真取S=361,L=200,N=8,K=2。
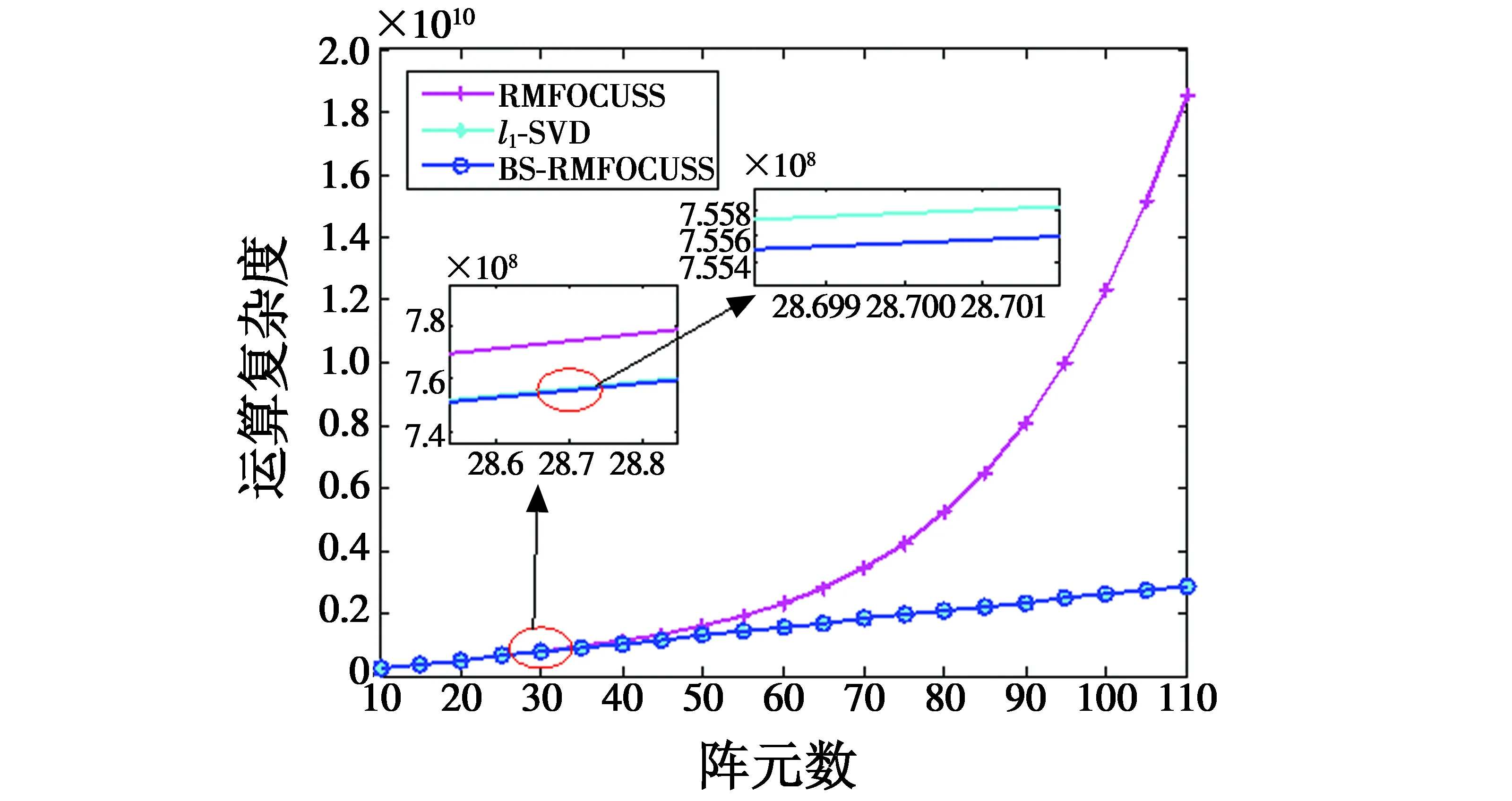
图6 BS-RMFOCUSS算法、RMFOCUSS算法和l1-SVD算法复杂度对比Fig.6 Complexity of BS-RMFOCUSS,RMFOCUSS and l1-SVD algorithms
从图6可以看出,当阵元数量较小时,3种算法的运算复杂度近似相同,且所提算法运算复杂度略低于RMFOCUSS算法和l1-SVD算法。然而,随着阵元数量的不断增大,阵元域RMFOCUSS算法的运算复杂度呈指数上升趋势,而本文所提算法和l1-SVD算法在复杂度增长率上远低于阵元域RMFOCUSS算法,且所提算法在运算复杂度上略优于l1-SVD算法。由此可知,与基于阵元域的RMFOCUSS算法和l1-SVD算法相比,所提算法具有较低计算复杂度。
4 结束语
本文针对传统DOA估计算法计算复杂度高、分辨率低等问题,提出一种基于波束域的多测量矢量欠定系统正则化聚焦求解(BS-RMFOCUSS)算法。该算法首先基于压缩感知理论对空域稀疏信号进行压缩采样,并将目标压缩信号从阵元域映射到波束域,避免了传统DOA估计算法较高计算复杂度的问题。仿真结果表明,与传统的CAPON算法、MUSIC算法及l1-SVD算法相比,所提算法在低信噪比及相干信号条件下,具有较好的DOA估计精度和角度分辨力;与RMFOCUSS算法和l1-SVD算法相比,所提算法具有较低计算复杂度和较好的算法运算性能。
