反潜巡逻机磁探仪区域搜索研究
2018-08-17谭安胜王新为尹成义
谭安胜, 王新为, 尹成义
(海军大连舰艇学院舰船指挥系,辽宁 大连 116018)
0 引言
所谓区域搜索,就是对指定的海域进行有组织的检查,目的在于发现敌潜艇,消灭发现的敌潜艇或对其进行跟踪[1-2]。反潜巡逻机使用磁探仪在指定海域对潜搜索前,需要进行作战筹划工作,进行作战筹划的基础数据之一是磁探仪有效搜索宽度,而磁探仪有效搜索宽度是敌潜艇潜航深度的函数,敌潜艇潜航深度对搜索者来说是模糊的,具有不确定性。传统的磁探仪有效搜索宽度是根据确定的敌潜艇潜航深度计算的,与实际情况不符。磁探仪有效搜索宽度又是搜索效能评估的基础,搜索效能评估结果又是搜索方法优化的依据。因此,研究反潜巡逻机使用磁探仪进行区域搜索问题时,必须从磁探仪有效搜索宽度入手。
1 磁探仪有效搜索宽度
如图1所示,设反潜巡逻机搜索飞行高度为ha,磁探仪最大作用距离为dc,则一架反潜巡逻机使用磁探仪对潜航深度为hq的潜艇搜索时,其搜索宽度W可表示为
(1)
在保持磁探仪有效工作的最大搜索飞行速度下,要想提高搜索效率,必须保持较大的搜索宽度。显然,反潜巡逻机的飞行高度越低越好。设反潜巡逻机的最低安全飞行高度为hamin,则反潜巡逻机使用磁探仪对处于深度为hq的潜艇搜索时的最大搜索宽度为
(2)
从式(2)可以看出:对于确定的磁探仪,当反潜巡逻机在最低安全飞行高度搜索时,不同的潜艇航行深度,其最大搜索宽度也是不同的。
表1给出了当磁探仪最大作用距离为400 m时,反潜巡逻机搜索宽度W随潜艇航行深度和反潜巡逻机搜索飞行高度的变化规律。
图1 磁探仪搜索宽度示意图Fig.1 The search width of magnetic anomaly detector
表1 磁探仪搜索宽度变化规律
从表1可以看出:对处于某一潜航深度的潜艇,反潜巡逻机飞行高度越低,其搜索宽度越大;当反潜巡逻机的搜索飞行高度一定时,潜艇潜航深度越深,搜索宽度越小。所以,反潜巡逻机在使用磁探仪对潜进行搜索时,应当在尽可能低的高度飞行,尽可能低的飞行高度应当是不低于反潜巡逻机的最小允许飞行高度,这对训练提出了更高的要求。

如图2所示,以反潜巡逻机磁探仪光泵探头为坐标原点,建立xoy直角坐标系,x轴铅垂向下。
图2 磁探仪平均搜索宽度分析示意图
设敌潜艇可能的航行深度范围为[hq1,hq2],则有
(3)
假设敌潜艇潜航深度在[hq1,hq2]范围内均匀分布,当x1≤x≤x2,即ha+hq1≤x≤ha+hq2时,平均弦长M[L]为
(4)
将式(3)代入式(4)并整理得M[L]=

(5)
表2磁探仪平均搜索宽度变化规律
Table2Theaveragesearchwidthchangeruleofmagneticanomalydetectorm

飞行高度潜艇航深范围[hq1,hq2][50,80][80,110][110,140][140,170][170,200][50,100][100,150][150,200][50,150][100,200]60759.7737.2709.0674.2631.9752.4708.5646.3730.4677.4100728.5698.2661.1615.9560.7718.6660.5579.5689.5620.0150674.2631.9580.4516.8435.9660.5579.5463.6620.0521.6200598.8539.6465.4366.6204.2579.5463.6261.6521.6362.6300324.4---261.6---400-
从表2中可以看出:在相同的敌潜艇航深范围内,反潜巡逻机的飞行高度越低,在深度上的覆盖范围越广,平均搜索宽度越大。因此,实际作战中,应当根据搜索海区情况、潜艇特性、反潜巡逻机的飞行特性以及对发现目标概率的要求来选择反潜巡逻机的飞行高度,使磁探仪的探测范围最大程度覆盖潜艇所有可能活动深度和更大的搜索宽度。
潜艇进入反潜巡逻机磁探仪搜索宽度范围内,是否被“发现”带有偶然性。潜艇被“发现”这一事件可用“平均概率”来表示,亦可称为获得概率,或正确分类接触概率,或正确判明接触概率,或正确接触目标概率,为了便于表达简称为“接触概率”[1],用pcjc表示,显然pcjc是一个条件概率,即在确定接触的条件下正确判明接触的概率,其大小与训练水平有关。则一架反潜巡逻机对处于深度为hq和处于深度范围为[hq1,hq2]的潜艇的有效搜索宽度Wyx分别为
Wyx=
(6)
磁探仪有效搜索宽度取决于它的灵敏度、潜艇的磁场强度、反潜巡逻机的飞行高度、潜艇航行的深度等因素,显然,前两个因素体现在dc中。
搜索者单位时间内的有效搜索面积称为搜索效率[1]。则一架反潜巡逻机使用磁探仪对处于深度为hq和处于深度范围为[hq1,hq2]的潜艇的搜索效率Uc分别为
(7)

2 磁探仪搜索方法
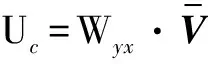
反潜巡逻机使用磁探仪在指定区域搜索时,根据指定搜索区域的大小、巡逻时间、参加搜索的反潜巡逻机的数量,可采用平行搜索法、多平行段搜索法两种基本搜索方法,如图3所示。反潜巡逻机飞行的高度应使得搜索宽度尽可能大。
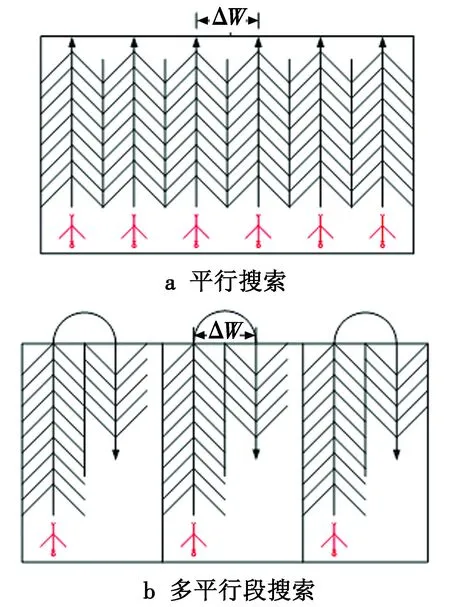
图3 磁探仪搜索方法示意图
为了能够在搜索过程中覆盖敌潜艇在深度上可能的分布,提高发现潜艇的概率,反潜巡逻机相邻搜索带应有一定的重叠,如图4所示。
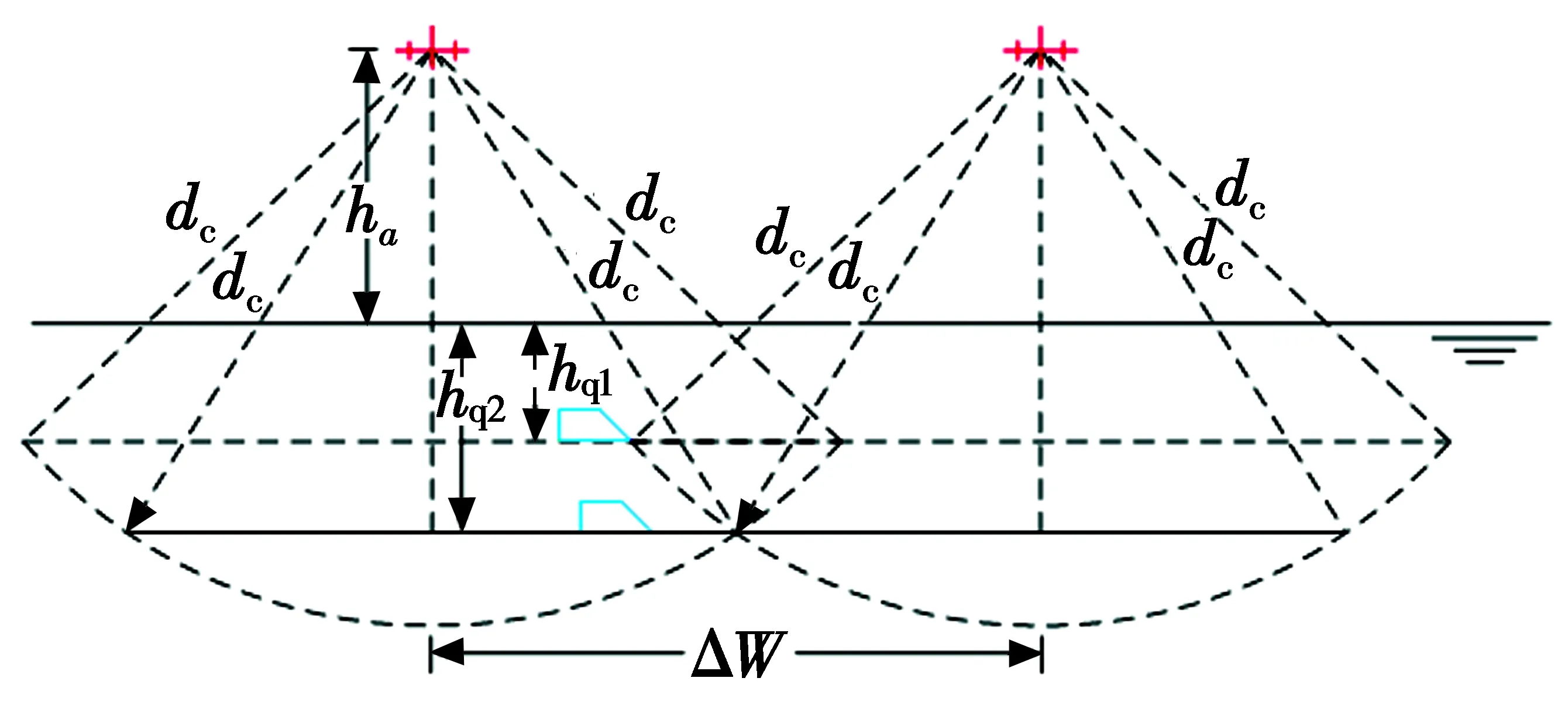
图4 相邻搜索带重叠系数分析示意图
重叠系数的大小应当满足:1)反潜巡逻机飞行安全的要求,即相邻两架反潜巡逻机之间的间距应不小于最低安全飞行间距;2)高搜索效率的要求,即相邻两架反潜巡逻机形成的搜索带宽度应尽可能大;3)高发现概率的要求,即处于相邻两架反潜巡逻机之间的潜艇,在可能深度分布范围[hq1,hq2]内难以摆脱搜索。
根据上述分析可知,对处于潜航深度分布范围为[hq1,hq2]的潜艇进行搜索时,相邻反潜巡逻机之间的间距ΔW应不大于hq2对应的搜索宽度,即
ΔW≤W(hq2)
(8)
考虑实际作战中使用的方便,ΔW可以磁探仪的最大探测距离dc为单位来表示,即ΔW=kdc。根据表1和表2的数据分析可知,k∈[1,1.5]。
2.1 单机搜索方法
单架反潜巡逻机使用磁探仪进行区域搜索时,应采用多平行段搜索法,即单机多平行段搜索法,如图5所示。
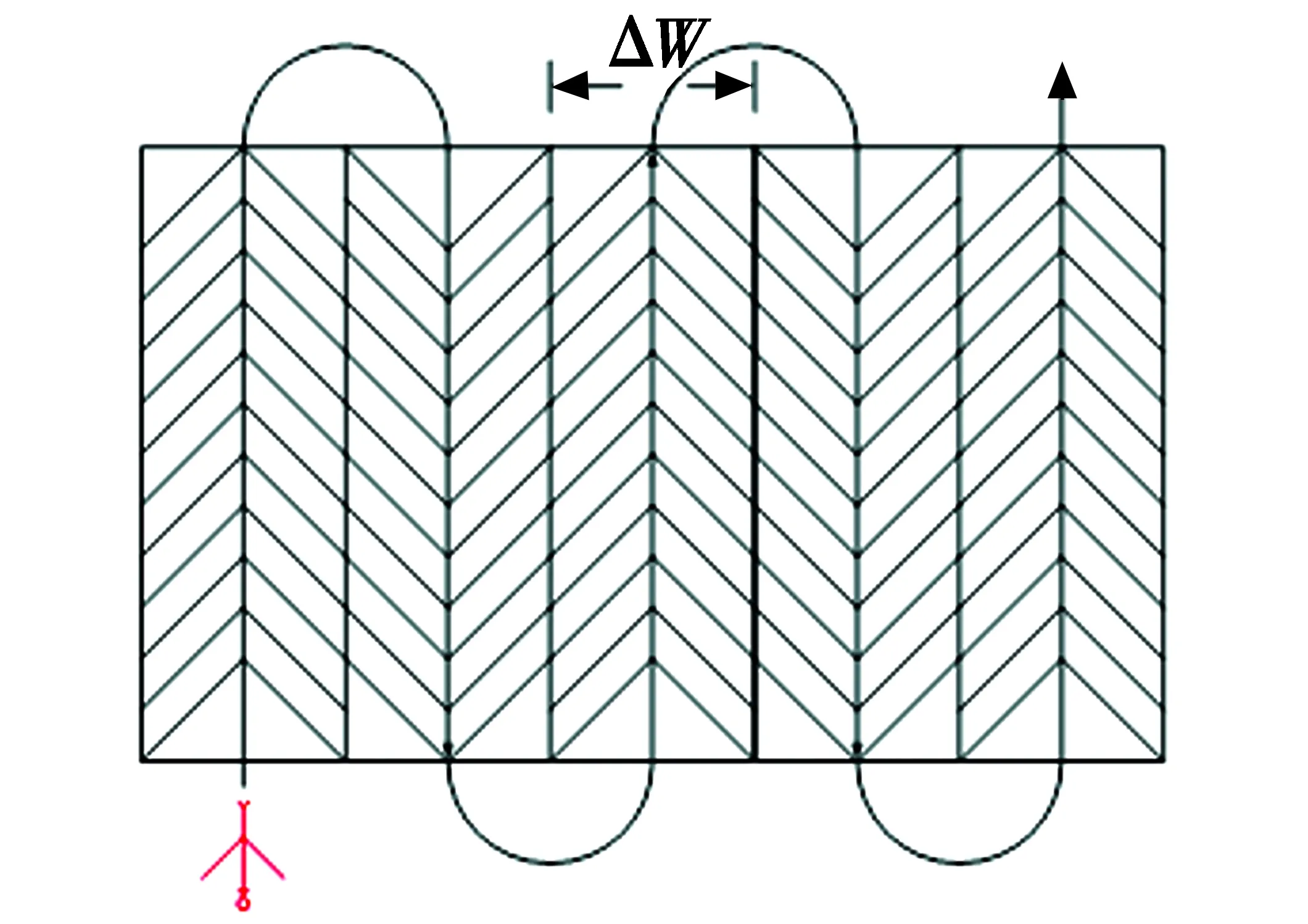
图5 单机多平行段搜索示意图
反潜巡逻机沿搜索区的长边(或短边)飞行,各平行段之间的间距为ΔW=kdc,k∈[1,1.5],搜索飞行高度应根据反潜巡逻机的飞行性能、海域深度、潜艇可能的航行深度范围具体确定;搜索飞行速度应根据反潜巡逻机的飞行性能和磁探仪的性能具体确定;转弯时的横倾角应当根据各平行段之间的间距、反潜巡逻机的转弯半径和机组人员操作的舒适度综合确定。
单机多平行段搜索法主要是对范围较小的指定海域实施搜索,如果指定海域范围较大,应使用多架反潜巡逻机进行搜索。
2.2 多机搜索方法
当指定的海域范围较大,单架反潜巡逻机在最大巡逻时间内无法完成搜索任务,或在给定的时间内无法完成任务时就需要多机搜索。多机搜索法可分为多机平行搜索法和分区多平行段搜索法。
如果反潜巡逻机的数量能够保证一次覆盖指定的搜索区域,则可以采用多机平行搜索法,如图3a所示。否则,应将指定的搜索区划分成几个子区域,分配反潜巡逻机在各自的子区域内采用多平行段搜索法,这种方法可称之为分区多平行段搜索法,如图3b所示。每个子区域的大小应当根据反潜巡逻机的数量具体确定,通常情况下,各飞行段应平行于子区域的长边。为提高反潜巡逻机转至下一个搜索航段时的安全性,所有反潜巡逻机应同步朝一个方向转向。
3 磁探仪得到接触后行动
磁探仪得到接触后,为了对接触进行高可信度的识别,可以使用两种方法,即借助浮标识别和借助磁探仪识别。当海况小于5级时,通常应借助浮标识别;当海况超过5级时,仅能使用磁探仪进行识别。
3.1 使用磁探仪进行识别
借助磁探仪对接触进行高可信度识别时,反潜巡逻机可通过一次转向法或两次转向法进行,如图6所示。一次转向法是指,搜索过程中反潜巡逻机磁探仪第一次得到接触后,立即转向270°(左转或右转)第二次驶向接触点,如图6a所示;两次转向法是指,搜索过程中反潜巡逻机磁探仪第一次得到接触后,立即连续两次转向180°(左转或右转)第二次驶向接触点,如图6b所示。

图6 磁探仪对接触识别方法示意图
反潜巡逻机第二次驶向接触点时,若磁探仪获得接触,机组人员应力争得到连续的磁接触。如果反潜巡逻机没有获得接触,则以首次磁接触点为中心,根据延迟时间计算目标可能的分布范围,反潜巡逻机在目标可能分布区内使用磁探仪进行平行搜索,如图7所示。如在目标可能分布区内没有得到接触,反潜巡逻机在搜索区内继续搜索。

图7 磁探仪在目标可能分布区内平行搜索
3.2 使用浮标进行识别
借助浮标对接触进行高可信度识别时,反潜巡逻机可通过布设相互重叠的包围型浮标阵进行。包围型浮标阵可布设成十字阵或三角阵,如图8所示。布阵时,应将磁探仪先前探测的可疑敌潜艇位置点置于浮标阵的中心。布设十字阵时,应使在浮标阵中心两侧浮标之间的间距等于1.5dc~2dc,如图8a所示。布设三角阵时,应使浮标阵中任意两个浮标之间的间距等于1.5dc~2dc,如图8b所示。
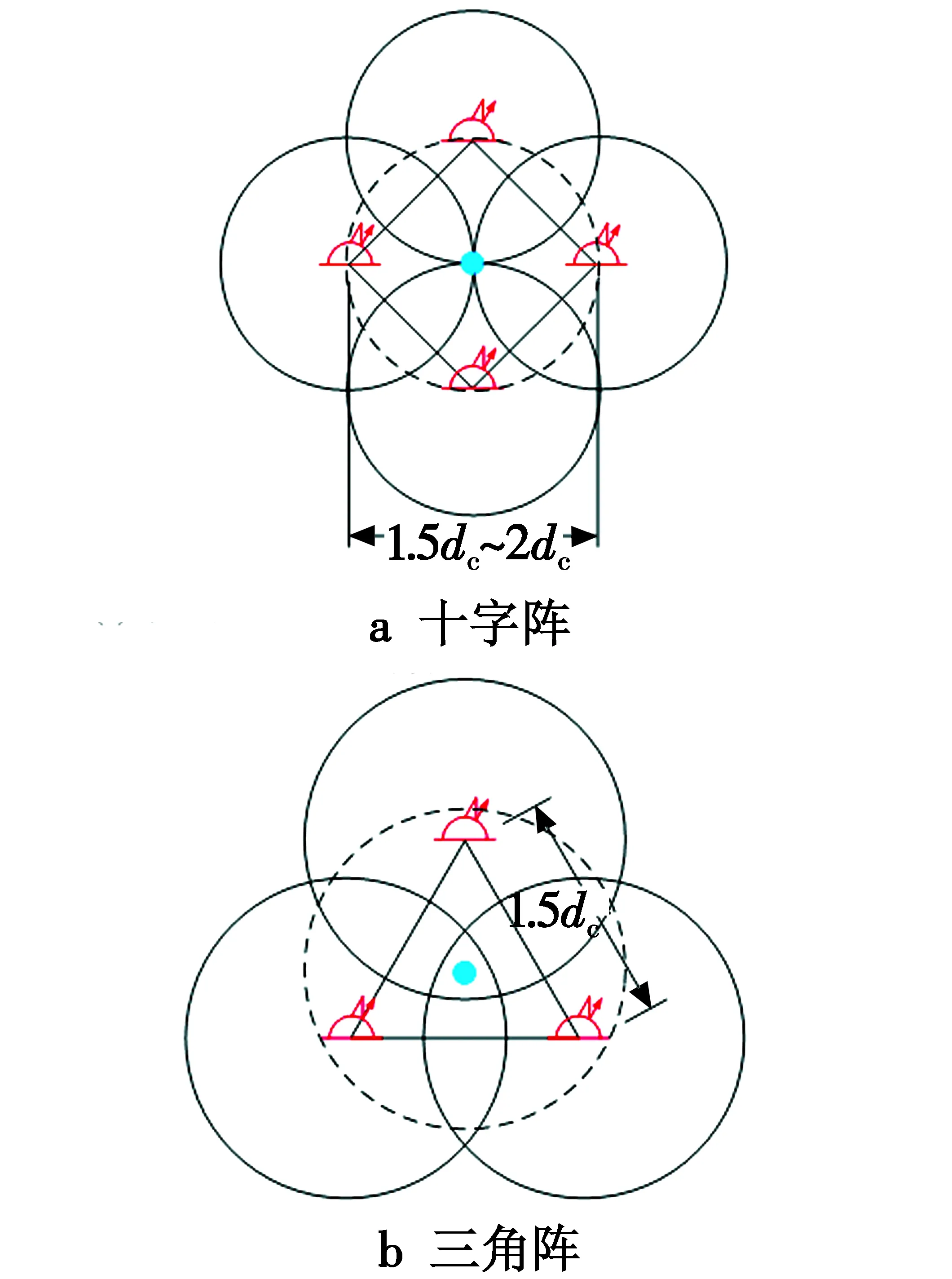
图8 对接触识别浮标阵
布设的被动声呐浮标接收到噪声后即发出信号,反潜巡逻机接收到信号后,需要再布设包围型浮标阵。如果又一次接收到噪声信号,则向指挥员报告并通报其他反潜巡逻机发现了潜艇,同时确定其运动要素。
3.2.1 十字阵布阵方法
反潜巡逻机使用磁探仪对潜搜索第一次得到接触点后,若决定使用声呐浮标十字阵对接触进行高可信度的识别,则十字阵的布阵方法可基于第1枚浮标的投放时机分为两种:一是即时布阵法(或称为点后布阵法);二是延时布阵法(或称为点前布阵法)。
即时布阵法是指,在磁探仪得到接触后,根据计算的时间适时布设第1枚浮标。这种布阵方法,实质上是在反潜巡逻机飞过接触点后开始布设第1枚浮标,所以也可称为点后布阵法。
延时布阵法是指,在磁探仪得到接触后,转向270°,根据计算的至再次获得接触点的时间布设第1枚浮标。这种布阵方法,实质上是在反潜巡逻机飞至再次获得接触点之前开始布设第1枚浮标,所以也可称为点前布阵法。
在实际作战中,磁探仪第一次得到接触后,要么采用即时布阵法,要么采用延时布阵法布设十字阵。通常情况下,可根据机组人员的训练水平进行选择。如果机组人员的反应时间满足即时布阵法布设第1枚浮标的时间要求,则采用即时布阵法;否则,应采用延时布阵法。
3.2.1.1 十字阵即时布阵法
十字阵即时布阵法如图9所示。设反潜巡逻机于t0时刻得到接触。如果得到接触后,机组人员的反应时间没有超过Δt1=kdc/2va,则可根据计算的时间布设第1枚浮标。
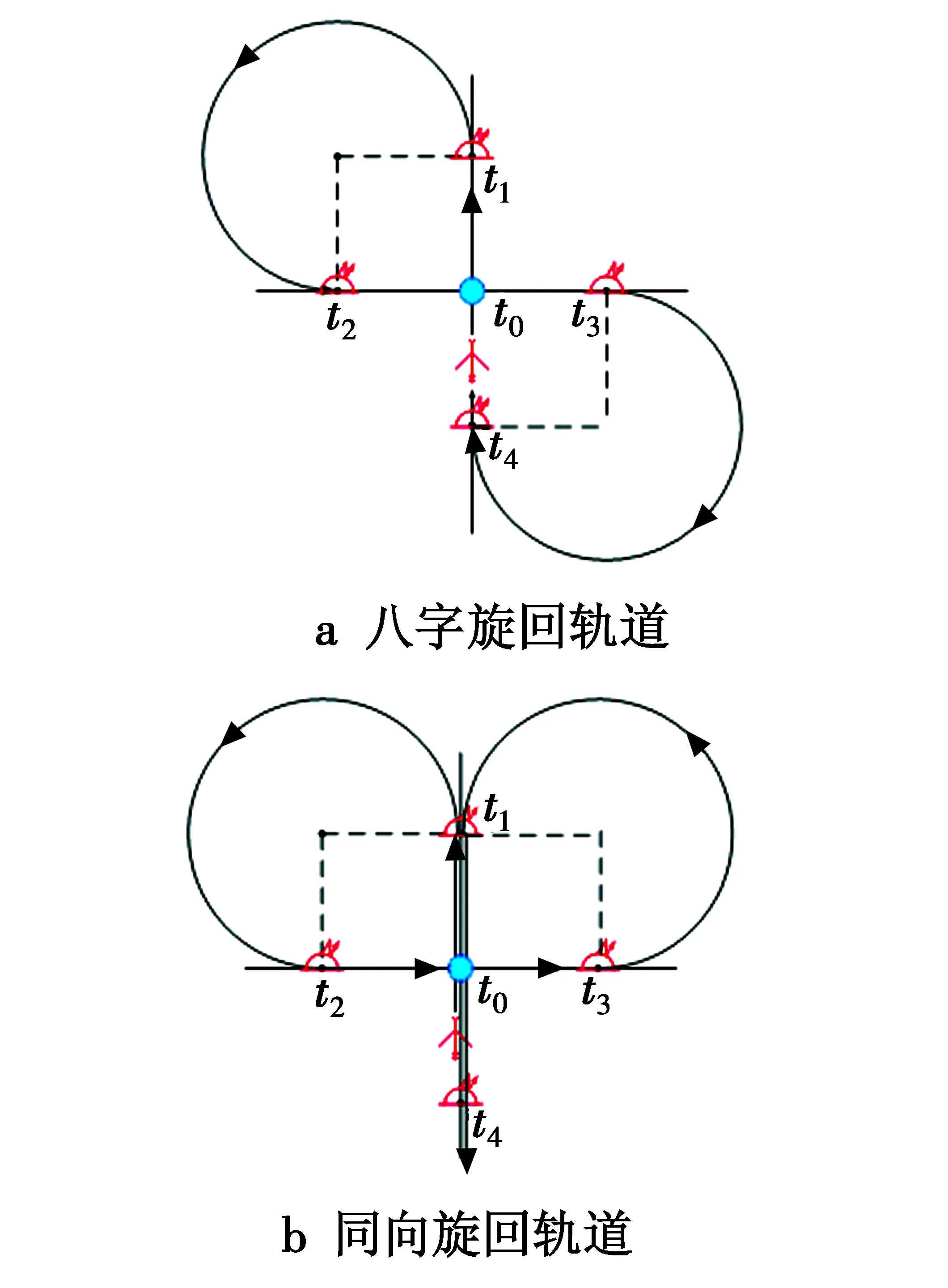
图9 十字阵即时布阵法
3.2.1.2 十字阵延时布阵法
十字阵延时布阵法如图10所示。

图10 十字阵延时布阵法
3.2.2 三角阵布阵方法
三角阵布阵方法如图11所示。反潜巡逻机使用磁探仪对潜搜索第一次得到接触点后,若决定使用声呐浮标三角阵对接触进行高可信度的识别,应立即投放第1枚浮标,随后左(或右)转按计算的时间投放第2枚和第3枚浮标。
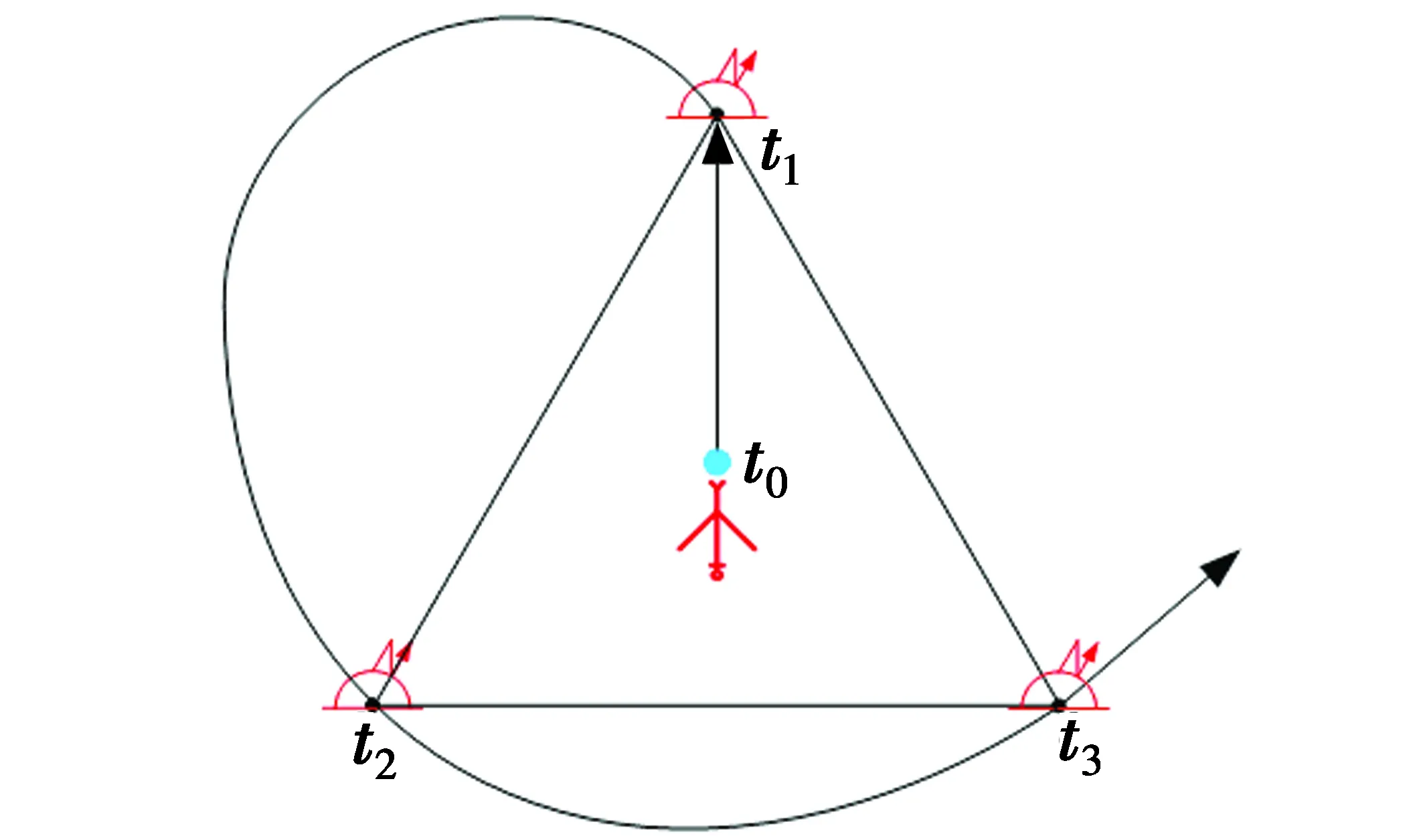
图11 三角阵布阵方法
使用“三角阵”有以下优点。
1) 可在获得接触后立即布设浮标,布阵过程中反潜巡逻机转弯次数少。同时,声呐浮标能较早地获得与目标的接触,浮标探测范围重叠面积大。
2) 能够节约搜索中用于识别的浮标数量、节省时间、较少地降低磁探仪搜索的效率。
另外,当多架反潜巡逻机组成编队使用磁探仪采用平行搜索法搜索时,可设置一架专门用于识别的反潜巡逻机,其应位于搜索编队的后方,高于搜索编队的飞行高度。当搜索编队的磁探仪获得接触时,识别机即可对接触进行识别,这时搜索编队可进行连续搜索且不降低搜索效率。
4 发现潜艇的概率
设N架反潜巡逻机在面积为S的搜索区内,采用平行搜索方法搜索了TS时间,浮标对目标的识别概率为Pfjc,根据上述分析结果,反潜巡逻机发现潜艇的概率Pc为[3-4]
(9)
将式(7)代入得
(10)
设N架反潜巡逻机在面积为S的搜索区内,采用多平行段搜索方法对潜艇进行搜索,每个搜索航段的长度为Lc,共有nc个航段,浮标对目标的识别概率为Pfjc,反潜巡逻机发现潜艇的概率Pc为
(11)
应当注意的是,当使用磁探仪对接触进行识别时,式(10)和式(11)中的Pfjc取1。
5 结束语
使用磁探仪对潜搜索具有隐蔽性好、不受海洋噪声干扰且可靠性和定位精度较高等优点,但其探测作用距离有限。因此,磁探仪通常在敌潜艇机动受限的不大或狭窄的海域使用,或当海况不允许使用其他搜索器材,或为了节省其他搜索器材时使用[5-6]。本文提出了平均搜索宽度的概念,建立了磁探仪平均搜索宽度计算模型;提出了反潜巡逻机磁探仪区域搜索的“两类三种”搜索方法,以及得到接触后的“两类四种”行动方法;给出了反潜巡逻机使用磁探仪在指定区域搜索发现潜艇概率计算模型。应当注意的是,反潜巡逻机本身也是一个磁源,包括永久磁场、感应磁场和涡流磁场,在其做机动飞行时,将对磁探仪产生干扰,这个干扰比磁探仪本机噪声一般要大数百倍。所以,反潜巡逻机在到达预定海域使用磁探仪搜索之前,机组首先应当规划磁补偿飞行航线进行磁补偿飞行,以获取该海域的磁补偿系数,确保磁探仪能正常可靠地探测目标。
