编队舰炮发射末端与导弹火力兼容方法
2018-08-17石章松刘志超吴鹏飞
石章松, 刘志超, 吴鹏飞
(海军工程大学,武汉 430033)
0 引言
武器装备的快速发展使得舰艇防空反导作战中的空中对抗越来越激烈,由此也带来了火力兼容的问题。舰炮作为舰艇防空作战中近末端防线,与各种型号中远程导弹的协同使用构筑了舰艇的安全防线。舰炮与导弹火力兼容的研究,目的就是解决因火力交叉产生的影响武器作战效能的问题。文献[1-3]建立了垂直发射导弹上升段和转弯段的弹道与散布体模型,研究了导弹在发射初段,重点是转弯段与火炮的兼容性问题。文献[4]通过武器发射初段动态火力散布体交叉的时空模型,提出了舰载武器火力兼容的优先级控制模型。在实际作战过程中,舰炮与导弹火力冲突除了导弹发射初期外,舰炮拦截末端,即与目标相遇点附近也是一个重要位置,炸裂的舰炮碎片极易对在同一时刻交叉航路点经过的我方导弹造成误伤。文献[5]通过将武器的火力交叉表示为射面交叉,建立了射面交叉的判断模型,给单舰硬武器火力兼容提供技术支撑。但在现代海战中,编队火力兼容的问题更加突出,也更迫切需要解决,从现有文献来看,该问题的解决一般通过建立武器弹道模型[6],分析是否存在火力交叉,其缺点是计算量过于庞大,存在应用难度。
综上,本文基于文献[7]空域格模型对空域资源的量化描述,对编队舰炮发射末端与导弹火力兼容方法进行了研究。
1 空域资源描述
如图1所示,选取战场任一点O作为原点,建立直角坐标系O-XYZ,OX轴水平指东,OY轴水平指北,OZ轴垂直于水平面。战场空间均等划分为底面边长为a、高度为b的长方体空间,即空域格G,其几何中心点坐标为((i+1/2)a,(j+1/2)a,(k+1/2)b),数组(i,j,k)称为空域格坐标[7]。设原点O为编队某舰艇中心,并以该舰艇舰炮全航路拦截反舰导弹为例进行仿真计算。
图1 空域资源的划分Fig.1 The division of airspace resource
2 基于空域格舰炮末端反导拦截过程建模
舰炮空域格尺度过大使得武器利用率较低,为提高计算精度和武器使用效率,一般选取小尺度的空域格。因此,对亚音速、超音速反舰导弹来说,对空域格的占用时间段可用占用时刻来近似。
2.1 基于空域格目标运动建模
假设目标运动速度为vt,航向角为φ,俯仰角为ϑ,初始位置为Xt 0(xt 0,yt 0zt 0),我舰运动速度为vw,航向角为Cw,则目标相对于我舰运动速度在各坐标的分量为
(1)
初始位置占用的空域格为(it 0,jt 0,kt 0),it 0=[xt 0/a],jt 0=[yt 0/a],kt 0=[zt 0/b]。(it m,jt m,kt m)为占用的第m个空域格,空间位置为Xt m(xt m,yt m,zt m),则
(2)
式中,Δt=a/vt x。
由空域格模型计算,则目标运动轨迹占用空域集合Gt={it m,jt m,kt m},m=1,2,…。
目标占用空域格的时间集合为
Tt={tt m|tt m=f(it m,jt m,kt m)=mΔt,(it m,jt m,kt m)∈Gt}。
(3)
2.2 基于空域格舰炮弹丸运动建模
2.2.1 舰炮弹丸弹道模型
舰炮弹丸质心运动方程组为[8-9]
(4)
式中:C为导弹系数;H(z)为空气密度函数;F(v)为空气阻力函数。
2.2.2 舰炮弹丸运动占用空域资源
假设舰炮弹丸初速为v0,射角为θ0,旋回角δ0,初始位置为(x0,y0,z0),利用四阶-龙格库塔法求解弹道微分方程,得到舰炮弹丸运动轨迹为X(x(t),y(t),z(t)),则舰炮弹丸运动占用空域资源为
(5)
记Gθ0,δ0={in,jn,kn},n=1,2,…,为舰炮弹丸占用空域资源集合。

(6)
舰炮弹丸占用空域格时间集合为

(7)
对于空域格(i,j,k)∈Gθ0,δ0,舰炮射击火控诸元为(θ0,δ0),即
Q={(θ0,δ0)|(i,j,k)∈Gθ0,δ0}。
(8)
2.3 拦截适宜性判断
舰炮对典型目标拦截过程如图2所示。
图2 舰炮武器系统对典型目标拦截示意图Fig.2 The sketch map of naval gun weapon system intercepting the typical target
2.3.1 舰炮武器拦截空域建模
舰炮武器末端反导拦截空域[10](如图3所示)以搭载武器平台为圆心,其拦截空域由自身武器性能决定,通常以拦截远界、近界、高界、低界、高低角描述[11-12],在水平面投影显示为环形。
图3 舰炮武器系统防空反导拦截空域Fig.3 The air defense and missile defense area of naval gun weapon system
远界约束为
近界约束为
高界约束为kb+b/2≤Hmax,低界约束为Hmin≤kb+b/2,
高低角约束为

若空域格A(i,j,k)满足上述条件,则判定在舰炮拦截空域内。舰炮拦截空域集合为
GKill={(i,k,j)|
(9)
2.3.2 舰炮武器拦截占用空域资源
考虑舰载障碍物遮挡及舰炮发射时的弹丸散布,舰炮有效射角θ∈[θ1,θ2],旋回角δ∈[δ1,δ2],则对满足射角约束的任一射击诸元(θ,δ),舰炮弹丸占用资源模型如下所述。
1) 舰炮弹丸占用空域资源集合为
(10)
2) 舰炮弹丸占用空域格时间集合为
(11)
(12)
2.3.3 拦截适宜性判断


(13)
2.4 火控诸元解算
2.4.1 火控诸元粗粒度解算模型

(14)
2.4.2 火控诸元细粒度解算模型

(15)
(16)
目标的位置为
(17)
直到弹目距离满足距离精度要求
(18)
式中,εD为弹目距离精度。
2.4.3 火控诸元粗、细粒度解算流程
3 仿真分析
舰炮末端全航路反导仿真流程如图4所示。
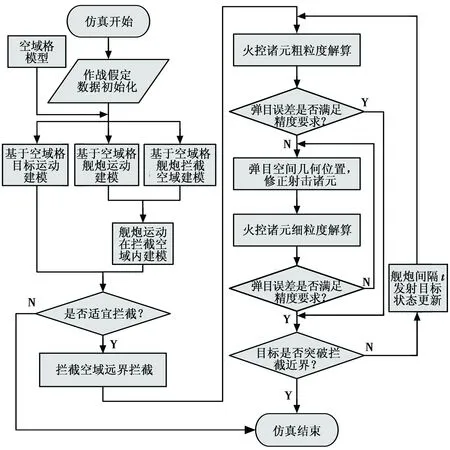
图4 基于空域格舰炮末端反导仿真流程Fig.4 The simulation flow of naval gun missile defense based on airspace grid
3.1 作战假定
假定目标T在t0时刻的位置坐标为(10 000,10 000,4200)(单位:m)、飞行速度为400 m/s、俯冲角为16.45°、航向角为225°,目标T在其全航路上均做等速直线运动;拦截目标T的近程舰炮初速为340 m/s,射击时间间隔为1 s,舰炮有效射击角度旋回角为-75°~75°,射角为5°~85°,舰炮拦截远界为8000 m、近界为500 m、高界为5000 m,低界为10 m,高低角为85°。空域格水平尺度为10 m、垂直尺度为10 m。
3.2 舰炮拦截空域仿真
当旋回角δ0一定,θ0步长为5°,舰炮质点运动时间取1~35 s,仿真得到垂直面内射角θ0与舰炮弹丸空间位置的关系如图5所示,舰炮落点时间与舰炮在拦截空域内落点位置的关系如图6所示。
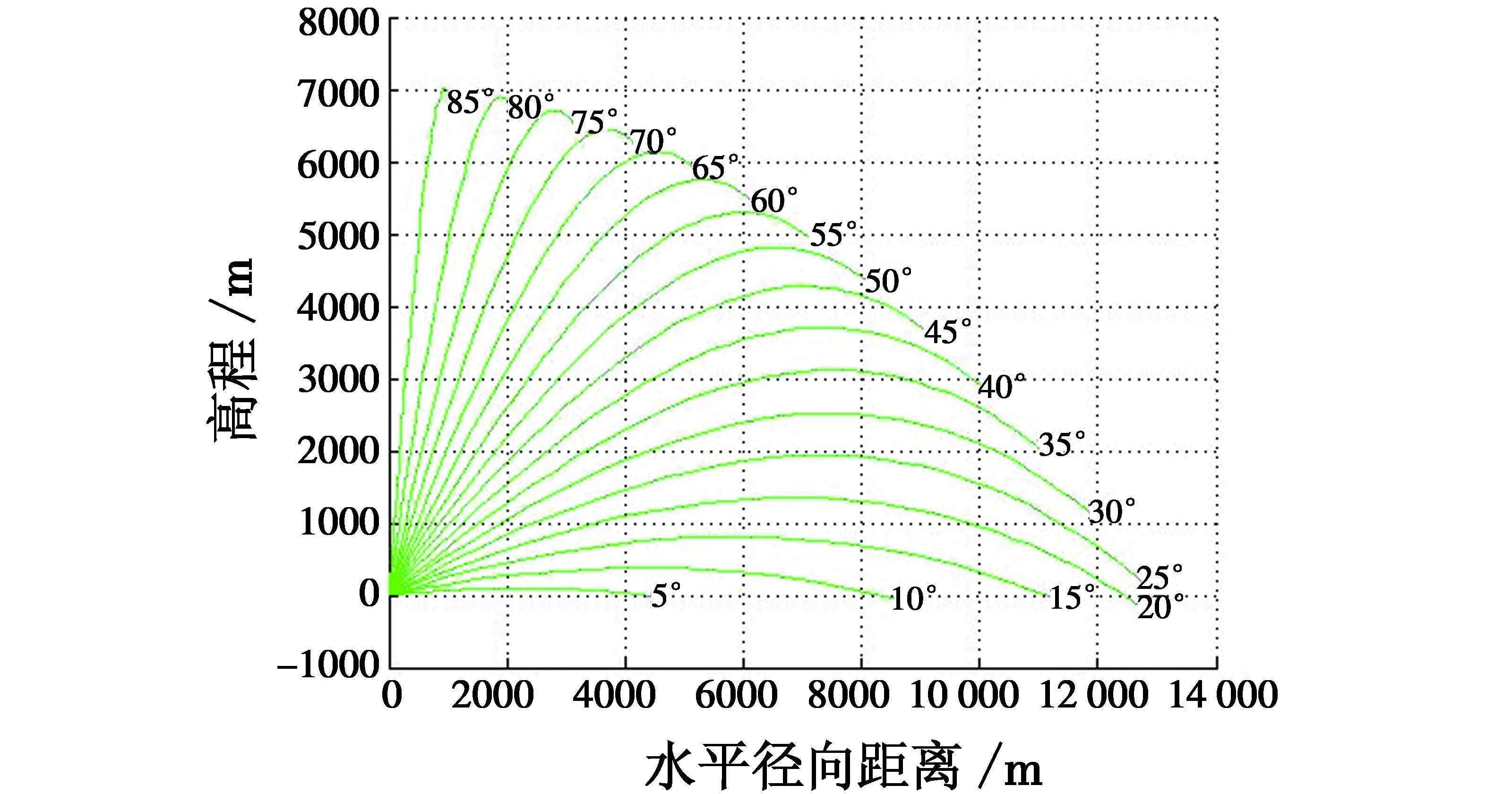
图5 射角变化舰炮质点弹道轨迹图Fig.5 The trajectory map of naval gun with variation of departure angle

图6 时间变化舰炮质点弹丸落点图Fig.6 The map of projectile falling points over time
3.3 舰炮末端反导全航路拦截仿真
舰炮全航路拦截过程为在拦截空域远界点开始拦截,近界点结束拦截,对目标全航路拦截仿真结果如图7所示。
图7 近程舰炮全航路拦截仿真图Fig.7 The simulation map of full route interceptionby naval gun weapon system
舰炮全航路拦截弹目相遇点占用空域资源如表1所示,全航路射击诸元通过火控诸元粗、细粒度解算模型实时、快速解算诸元,不断修正弹目距离,调整武器射角和旋回角,使弹目距离逐渐收敛,全航路防空反导拦截射击诸元如表2所示。

表1 弹目相遇点占用的空域资源
表2 全航路防空反导拦截射击诸元
4 结束语
本文运用了空域格模型思想对舰炮全航路防空反导进行了研究,采用弹道微分方程进行火控解算,建立了基于空域格的火控诸元粗、细粒度快速解算模型,具有较广适应范围和通用性;仿真计算了舰炮在对来袭目标全航路拦截过程中与目标相遇的时间和空域。当导弹轨迹与舰炮预测炸点在同一个时刻处于同一个格子时,可延缓舰炮或导弹的发射来避免冲突,其研究成果为编队舰炮发射末端与导弹火力兼容控制方法提供了一种新的思路。
空域格尺度大、计算量小,武器资源利用率低;反之,计算量大,武器资源利用率高。空域格尺度的大小要根据舰炮的爆炸杀伤区大小进行设置。合理的空域格尺度设置既能够简化计算,又能提高武器资源利用效率,满足防空作战中对武器安全管理和综合控制的战术需求。
