换流站阀厅内壁清洁机器人的设计*
2018-08-03焦义康刘志远邹洪森赵欣洋
焦义康,刘志远,潘 烨,邹洪森,赵欣洋
(1.浙江工业大学 特种装备制造与先进加工技术教育部/浙江省重点实验室,浙江 杭州 310014;2.国家电网宁夏检修公司,宁夏 银川 750000)
0 引 言
换流站是在高压直流输电系统中,为了完成将交流电变换为直流电或者将直流电变换为交流电的转换,并达到电力系统对于安全稳定及电能质量的要求而建立的站点。换流阀作为换流站直流输电工程的核心设备,通过依次将三相交流电压连接到直流端得到期望的直流电压和实现对功率的控制。阀厅是放置换流阀的封闭建筑,换流站及直流输电系统的运行性能和安全可靠程度与阀厅内电力设备的安全运行度密切相关,对整个电力系统的运行也有重要的影响。阀厅虽然是封闭建筑,但是长年累月的累积依然会导致阀厅内壁积灰,对换流阀的安全性和使用寿命造成很大的影响,因此要保持阀厅壁面的清洁。
经过现场考察,换流站阀厅壁面为特殊的钢结构,壁面总高30 m,壁面横向每隔150 mm会有一个高24 mm的梯形加强筋,并且壁面上存在规则排列的高10 mm的螺钉,同时壁面上方约0.4 m处有横梁悬空。目前全部由人工清洁,但人工清洁危险性高,且需要换流站停电,损失巨大。为此,需要开发一款爬壁机器人。为了不影响阀厅的正常工作,阀厅顶部与壁面不能搭建用于吊装机器人攀爬的缆索或其它设备。
早在1966年,日本就研制出基于负压吸附的爬壁机器人样机[1]。我国的壁面移动机器人研究起步较晚,哈尔滨工业大学、北京航空航天大学、上海交通大学在壁面移动机器人这一领域处于国内领先地位。现有的壁面清洁机器人主要分为3类:磁吸附清洁机器人[2-5]、负压吸附清洁机器人[6-9]、仿生清洁机器人[10-13]。负压吸附清洁机器人由于采用了负压吸附方式使它无法在换流站阀厅这种特殊结构的壁面上产生稳定的吸附力,导致机器人不能正常工作;而市面上的磁吸附清洁机器人由于设计时未考虑到换流站阀厅的环境以及壁面的特殊结构因此也无法在此壁面上稳定工作;仿生吸附一般在外形、吸附原理和运动形式上都参照壁虎或尺蠖设计,可微型化,但承载能力弱,不能满足搭载清洁装置的要求,同样不适用于换流站阀厅的清洁。
因此,本文将研制一款专用于换流站阀厅内壁的清洁机器人。
1 行进吸附和驱动方式
1.1 行进方案
履带式运动可靠稳定,承载能力和越障能力强,故采用履带式运动方式[14]。由于换流站阀厅壁面有凸起的螺钉,为了提高机器人的越障能力,本文采用了双节履带式行进机构。双节履带机器人在越障过程中的效果如图1所示。
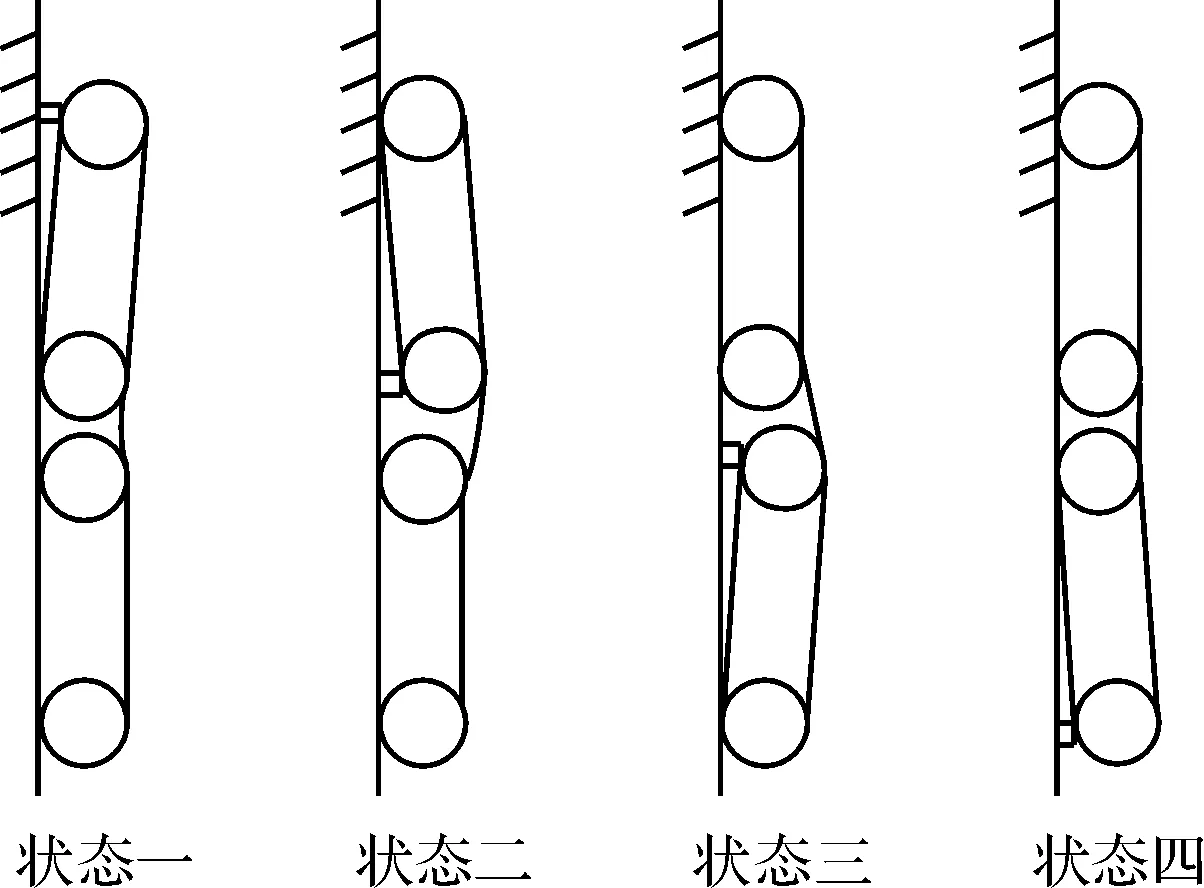
图1 双节履带机构越障示意图
行进机构分为前履带和后履带两部分,前后机身通过3条弹簧钢连接,以增加机器人柔性。双节履带的方案使得机器人单节履带在越障时由于弹簧钢的弹性变形使得另一节履带完全吸附于壁面,提高了机器人越障能力。
其中履带是由链轮链条及永磁体组成,由于链速及传递的功率比较小,本研究选用了型号为08B国标GB/T1243-2006的普通短节距滚子链,其节距p=12.7 mm。考虑到机器人尺寸以及链条均匀磨损,为此传动比i取1,链轮齿数为z1=z2=19。链轮实际中心距为349.4 mm。机器人攀爬过程中单个链条始终稳定吸附的永磁体数量为7块。
1.2 吸附方式
换流站阀厅内壁为钢结构,属于导磁性材料,采用磁吸附方案。由于电磁吸附结构复杂,单位体积产生的吸附力小,且电磁吸附存在断电安全隐患,选用永磁吸附。
1.3 永磁吸附单元永磁体与磁路设计
为了制造及安装的方便,永磁吸附单元被设计为矩形,其结构尺寸(长×宽×高)为:36 mm×12 mm×4 mm。永磁吸附单元和磁路如图2所示。

图2 永磁吸附单元
永磁体通过螺钉固定在链条的弯板上。为了在相同质量下尽可能地增大磁吸附力,本研究将相邻永磁体采用图中方向进行充磁和排列,使得相邻两个永磁体形成的闭合磁力线尽可能多地穿过壁面,并且相邻永磁体“两两相吸”的方式使永磁体形成“环环相扣”的整体,吸附得更加牢固。
1.4 驱动方式
电机驱动是应用最广泛的一种驱动方式,体积小、重量轻、响应速度快、精度高[15]。基于机器人的工作环境等要求,笔者选择电机驱动方式,同时根据电机应用要求,选用带刹车的步进电机。
选定电机类型后,需要对电机位置进行布置,由于机器人采用了双节履带式行进机构,电机位置主要有4种布置形式,如图3所示。

图3 4种驱动位置示意图
因为清洁机器人是竖直向上攀爬,重心越低发生倾覆的概率越小,稳定性越强。但在机器人越障时,若采用后履带后驱有可能使机器人后履带出现脱离壁面而发生打滑无法行进的现象,因此本研究选择后履带前驱并通过链传动将动力传递到前履带轮的驱动形式。
2 清扫机构
由于换流站阀厅对室内环境有一定的要求,内壁不允许用液体冲洗壁面,并且壁面存在加强筋和螺钉等凸起,也不宜采用擦的方式,本研究采用了滚刷加吸尘的组合清扫方式,如图4所示。
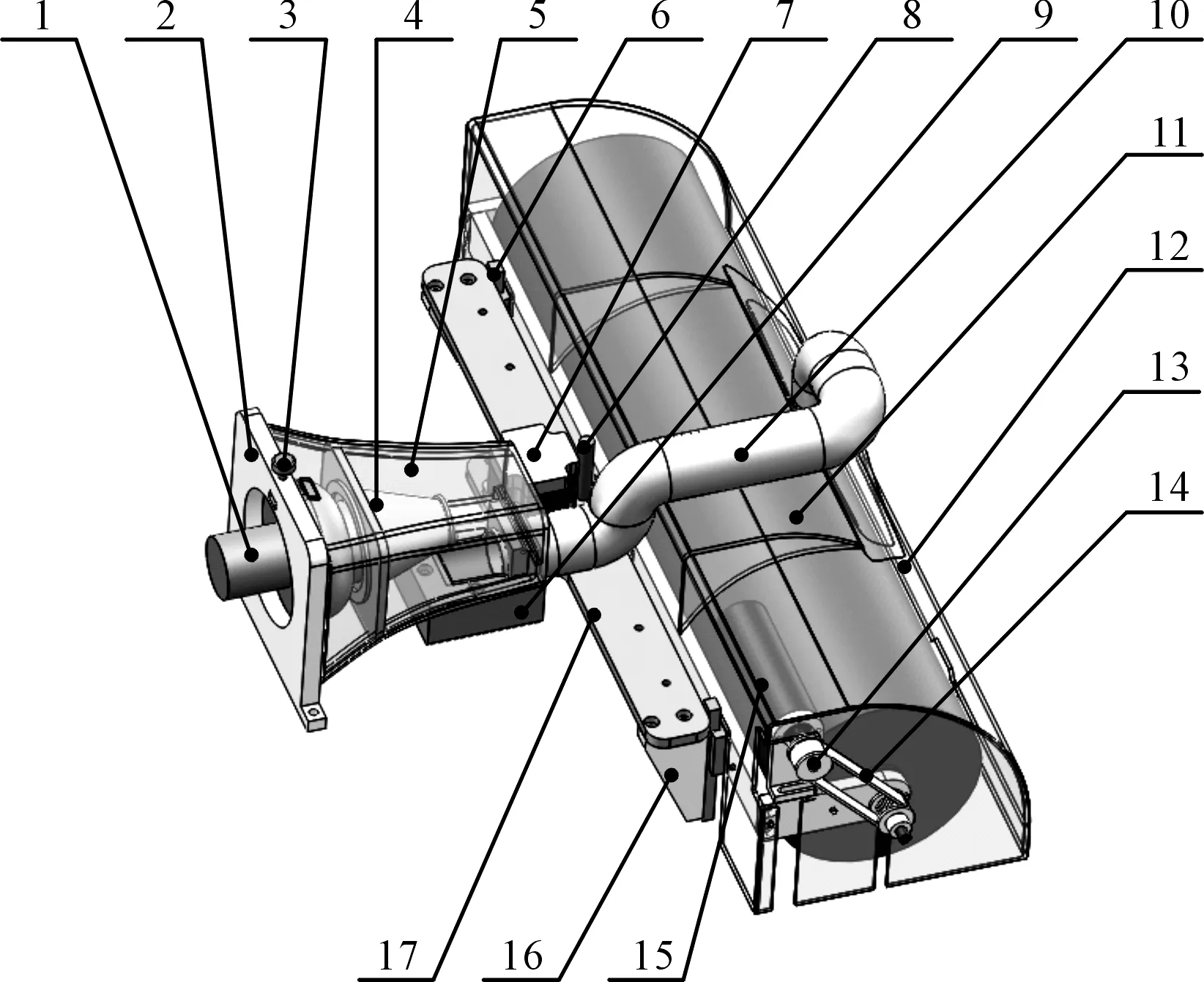
图4 清扫机构1—吸尘电机;2—支撑板;3—按钮;4—过滤网;5—集尘罩;6—导轨;7—丝杠电机;8—接近开关;9—吸尘支座;10—气管;11—滚刷;12—遮尘罩;13—带轮;14—同步带;15—直流电机;16—导轨支撑板;17—安装板
清扫机构主要包括升降、吸尘和清扫3大功能模块。本文采用模块化的思路[16],将升降模块和清扫模块通过一块安装板与机器人机身相连接,便于一同安装与拆卸,提高了工作效率。在吸尘模块中,集尘罩可通过上方的按扭方便拆卸,便于重复利用。另外,吸尘器壳和遮尘罩为3D打印制造,气管为EVA材质软管;滚刷的形状则是根据彩钢板截面形状而定制的。
机器人清扫作业时,直流电机带动滚刷转动,将壁面上的灰尘扬起,并挡在遮尘罩内。然后吸尘电机将扬起的灰尘通过气管吸入集尘罩内以达到除尘的效果;当机器人无需工作时,丝杠电机带动清扫模块沿导轨向上移动,使清扫刷脱离壁面,当上升到一定高度时,接近开关检测到信号,丝杠电机断电,清扫装置即停止运动。
3 机器人结构确定
换流站阀厅壁面清洁机器人采用永磁吸附方式与双节履带式行进机构,可以稳定吸附于壁面并安全的翻越螺钉;并采用带刹车的步进电机为驱动以防止机器人断电滚落;以及专用于换流站阀厅壁面的清扫机构。机器人整机尺寸(长×宽×高)为:271 mm×507 mm×245 mm,结构如图5所示。

图5 整机结构图1—后机架;2—电路板;3—驱动器;4—弹簧钢;5—履带;6—前机架;7—电池;8—升降电机;9—接近开关;10—导轨;11—滚刷;12—遮尘罩;13—气管;14—直流电机;15—连接板;16—红外传感器;17—过滤网;18—按钮;19—吸尘电机;20—传动链;21—张紧器;22—步进电机
机器人工作时始终有28块永磁体吸附于壁面,并且由于两个步进电机驱动,因此可以实现小幅度转向和前进后退。另外,由于壁面加强筋的存在,布置在机器人前后左右的4个红外传感器可以通过测量与壁面的距离实时检测机器人的位置,当机器人沿竖直方向发生一定角度的偏转时,距离变化使传感器发送信号到步进电机,通过差速调节机器人转向。驱动电机均安装于后履带,以使重心后移以增强抗倾覆性能。该壁面清洁机器人专用于换流站阀厅壁面的清洁工作。
4 驱动力计算
驱动模块的设计主要在于电机转矩的计算和选型。机器人总质量m约为25 kg(含电池质量),现对机器人所需驱动扭矩进行计算。
清洁机器人攀爬过程中,永磁体是“一吸一离”的向上移动,因此受到的阻力主要包括:机器人自身重量G、揭起单个永磁体的阻力矩M和加速时所克服阻力F1。其中为了防止永磁体损伤壁面,对永磁体外表面加了一片薄橡胶,查机械设计手册知:钢铁与橡胶的静摩擦系数为0.7。
其中,机器人自身重量G为:
G=m·g
(1)
加速时所克服阻力F1为:
F1=m·a
(2)
式中:m—机器人自身质量;a—机器人行进加速度。
故机器人在行进过程中受到的总的阻力F2为:
F2=G+F1
(3)
机器人稳定攀爬时速度约为2.2 m/min,设定机器人由静止到稳定运行的时间为1 s,那么可以得到加速度a=0.04 m/s2。将m,a的值代入(1~3)中得到机器人总的阻力F2=246 N。
另外,已知机器人平稳行进时始终吸附于壁面的永磁体数量n=28,则单个永磁体磁力F3应满足:
(4)
相应地:
(5)
式中:d—壁面到驱动轮中心距离;N—完全吸附于壁面上的永磁体数量。
驱动扭矩T的计算公式为:
(6)
式中:N—驱动电机数量;η—传动机构效率;i—传动机构传动比。
将d=0.09 m,η′=0.8,i=10及式(5)代入式(6),得到驱动扭矩T≥2.93 N·m。
根据上述计算结果,并考虑到安全系数,最终笔者选取一对型号为5704HS42D8的步进电机、DM5045型号的电机驱动器和减速比为1∶10的行星齿轮减速器。其技术参数如表(1,2)所示。

表1 步进电机技术参数

表2 行星齿轮减速器技术参数
5 样机实验及结果
首先本研究对机器人做攀爬速度测试,通过秒表全程计时,计算出小车攀爬速度。
实验数据如表3所示。

表3 攀爬速度测试
由表3可知:机器人实际攀爬速度略低于设定速度,相差幅度在2%~5%之间。其原因在于履带与壁面接触面滑动影响了攀爬的速度。
对机器人样机做各项性能实验如图6所示。

图6 机器人样机实验
经过实验得到机器人性能参数如表4所示。

表4 性能测试
爬壁实验结果表明:机器人关键结构和工艺设计合理,能稳定并安全地在壁面上攀爬,并可以完成清洁壁面的任务。
6 结束语
针对换流站阀厅的特殊工况,本研究开发了一款集吸附攀爬、直线行驶、清洁和越障等功能于一体的专用壁面清洁机器人。主要工作如下:
(1)设计了双节履带式行进机构,提高了机器人的越障能力;设计了永磁体以特定方向充磁和排列的永磁吸附方案,以使同等质量下的永磁体产生较强的吸附力;选用了带刹车的步进电机驱动,有效防止突然断电造成的机器人滚落,以及后履带前驱在降低机器人重心与稳定攀爬之间取得了良好的平衡;设计了专用于换流站阀厅壁面的滚刷加吸尘组合的清扫机构;
(2)笔者对机器人驱动转矩进行了理论计算,并根据计算结果完成了步进电机及减速器的选型,样机实验验证了计算结果的可靠性;
(3)笔者完成了样机的制作,并模拟真实工况对样机进行了攀爬速度测试。结果表明:由于存在轻微打滑,机器人速度相比设定速度减小了约2%~5%。
