天狼星免像控航摄系统与Inpho系统在无人机遥感数据后处理中的对比
2018-08-03王小龙陈文新敖庄哲雷尚彬
王小龙,陈文新,敖庄哲,雷尚彬
(中交(天津)生态环保设计研究院有限公司,天津 300456)
随着测绘技术和仪器设备的快速发展,小型无人机航摄系统在远程遥控、续航时间、飞行品质上有了明显的突破,近几年在地形测量方面具有广泛的应用前景[1]。作为传统航空摄影测量的一种重要补充方式,无人机遥感日益成为获取空间数据的重要手段[2]。然而,一般的无人机航摄测量需要野外采集大量的像控点进行辅助,而外业布设控制点受天气环境的影响较大,人员成本较高,解算过程需要内业刺点,对作业人员的经验具有很高的要求,还没有完全摆脱常规外业地形测量的约束。
本文航飞外业采用拓普康天狼星无人机免像控航空测图系统——Sirius Pro,该系统高度集成,一体化程度高度融合,主要由系统硬件设备、影像处理系统、信息分析系统、业务运行保障系统等组成[3]。系统主要有两大优点:①实现免像控测量。通过高精度GNSS RTK技术和精密定时技术来确定每个曝光点的精确位置,等同于在空中自动布设超过1000个像控点,从而免去地面像控点的布设,节省了大量的时间和成本[4]。②高度自动流程化处理。利用天狼星航摄系统Agisoft Photoscan Pro可以实现免像控影像的一键式拼接处理,快速得到高精度的DOM、DEM等测绘产品。
本文选择松花江大坝为研究区,以Inpho数字摄影测量系统和天狼星航摄免像控系统为数据处理平台,对比了2个系统生产DOM的处理流程及关键技术,并验证了2个系统影像处理精度,分析免像控天狼星无人机遥感数据处理及生产中的优势,为地形测量提供新的解决方案。
1 航飞测试
1.1 研究区域概况
本试验选择在吉林松原哈达山大坝进行,采用天狼星无人机对研究区进行免像控测量。研究测区宽0.40 km,长2.90 km,测区面积1.16 km2。测区内有大坝、房屋、公园、水域、道路、草地等人工设施。飞行时选择风力不大于4级,晴朗的天气。飞行区域地势平坦,没有高大的建筑物,易于起飞和降落。
1.2 像控点和检测点的布设
本文为了对天狼星航摄系统航拍数据进行后处理和检测测图精度,需要在测区布设像控点和检测点,其中布设的像控点主要用于Inpho摄影测量系统的后处理过程中。
航摄作业前,在测区范围内均匀布设了25个边长为50 cm的十字靶标像控点,25个边长为50 cm的十字靶标平面检测点,20个边长为50 cm的十字靶标高程检查点。并用GPS RTK测量每个检测点的固定解,测量精度在2 cm以内。
1.3 航线规划和飞行参数介绍
本次试验设置航摄比例尺为1∶500,飞行高度为169 m,航向重叠度为85%,旁向重叠度为75%,总共布设6条航线覆盖整个测区。
本次试验中天狼星无人机总共飞行1个架次,飞行时间约24 min,获取影像494张,具体的飞行参数见表1。

表1 天狼星飞行参数
1.4 无人机影像检查及GPS精度介绍
在外业无人机影像数据获取后,需要对无人机影像数据进行初步查验和筛选,影像的重叠度需要重点检查,若重叠度较小、有漏洞则需要及时补飞或重飞[5]。本次试验获取的影像大部分重叠度在70%以上,满足影像后处理的要求。
航测数据后处理过程中需要输入基站点坐标和天线垂高,确定照片和POS信息相互匹配,从而为空三解算及平差处理做好准备,处理结果及误差精度小于0.01 m,统计所有摄站点GPS的中误差见表2。

表2 摄站点GPS中误差 m
2 天狼星和Inpho数据后处理系统
MAVinci、AgisoftPhotoscanPro为天狼星航摄免像控系统的主要组成部分,Inpho为欧洲市场上空中三角测量和正射处理占有份额最大的软件[6]。以天狼星航测系统获得研究区的航测数据作为数据源,分别用天狼星和Inpho数据后处理系统对航测数据进行处理,以期对比两个后处理系统的优势及成果的精度。
2.1 天狼星数据后处理系统介绍
天狼星免像控航摄系统是一套智能航空测图工具,主要包括地面站软件MAVinciDesktop和影像后处理软件PhotoScan。MAVinciDesktop兼容市场上常见的多种影像处理软件,并且进行了深度整合,可以将所有外业数据一键式导入到PhotoScan中并进行智能后处理,整个流程不需要任何人工交互编辑操作,最终生成DOM、DEM、点云、三维瓦片模型等航测成果并能取得很高的精度[7]。
2.2 天狼星后处理流程
(1) 原始数据准备:主要包括原始照片、POS信息、基站点坐标、天线垂高。
(2) 数据预处理:主要包括照片和POS信息相互匹配,设置投影坐标系统、中央子午线、投影方法,输入基站点坐标和天线垂高,将匹配数据导出到PhotoScan软件中。
(3)PhotoScan中MAVinci插件一键式处理:选择生成产品的种类、格式,运行数据处理即可[8]。一键式处理主要包括对齐照片、建立密集点云、建立网格、建立瓦片模型、生成DEM、生成正射影像。影像分架次依次处理,最终产品种类主要有DOM、DEM、密集点云、瓦片模型。
(4) 利用GlobalMapper对DOM进行拼接和分幅。
2.3 Inpho数据后处理系统介绍
Inpho摄影测量系统是欧洲最著名的航空摄影测量与遥感处理软件之一,是德国Inpho公司的核心产品,可以全面系统地处理航测遥感、激光、雷达等数据,其空中三角测量软件和正射处理软件在欧洲占有的市场份额最大[9]。Inpho摄影测量系统由9个模块组成:ApplicationsMaster基础平台、Match-AT自动空中三角测量、inBlock测区平差、Match-TDSM自动提取地形地表模块、DTMasterDTM/LIDAR编辑软件、OrthoMaster正射纠正、OrthoVista镶嵌拼接、SCOP++高效管理DTM、SummitEvolution摄影测绘立体处理工作站[10]。
2.4 Inpho数据处理流程
(1) 原始数据准备:主要包括原始像片(同天狼星)、POS数据(同天狼星)、相机检校参数(同天狼星)、25个控制点数据。
(2) 空中三角测量:首先在ApplicationsMaster中新建工程,依次定义相机、导入POS信息、添加照片、导入控制点和设置航带;其次使用Match-AT进行连接点自动提取和区域网平差;然后进行像控点和检查点量测;最后光束法区域网整体平差和争议点编辑,完成空中三角测量。
(3)DEM生成:利用Match-TDSM工具生成DEM,在DTMaster中完成DEM的预处理编辑操作,最终达到精度要求。
(4) 在OrthoMaster中结合生成的DEM进行单张像片正射纠正,在OrthoVista中利用纠正后的像片智能镶嵌出整个测区的初始DOM,检查、编辑DOM及其镶嵌线,自动分幅后即可完成DOM制作。
3 天狼星和Inpho数据后处理对比
3.1 数据处理流程的对比
天狼星航测系统是免像控航空摄影测量系统,前期减少了野外布设大量像控点的工作。其将MAVinci和PhotoScan软件整合到一起,MAVinci地面站数据可以直接导出到PhotoScan中。在PhotoScan中数据后处理,采用定制的MAVinci插件提供一键式数据处理平台,在整个过程中只需设置少量参数,不需要太多的人机交互操作。
Inpho系统为传统加像控航空摄影测量系统,前期需要在野外布设大量像控点。在ApplicationMaster平台中创建工程需要定义相机、添加照片、导入POS/控制点、设置航带等一些复杂的操作。而且Inpho系统中各个模块都是独立的,没有很好地整合到一起,处理数据比较繁琐。Inpho系统需要人工刺点,对控制点的布设也有特别的要求,需要大量的人为干预,大大降低了数据后处理的效率和精度。
通过以上两个系统的对比可以看出,天狼星航测系统较传统的Inpho加像控航空摄影测量系统不管是在前期像控点的布设上,还是在数据的后处理中都体现出了很强的优势。天狼星航测系统不但节省了布设像控点的大量时间和成本,而且优化了数据后处理作业流程,减少了刺点和平差过程中的人为误差,可以实现免像控影像的一键式拼接处理,大大提高了数据后处理的效率和精度。
3.2 DOM、DEM精度对比
本文在ArcGIS平台中分别对天狼星航摄系统和Inpho系统制作的DOM、DEM进行叠加,检查正射影像和DEM是否吻合。同时,利用相同的平面和高程检查点分别对两个系统制作的DOM、DEM成图精度进行检查,其中天狼星航摄系统DOM、DEM中误差分别为0.043 1、0.084 3m,Inpho系统DOM、DEM中误差分别为0.052 6、0.158 6m。从数据中分析,两者都满足1∶500航空摄影测量对平面和高程中误差的限差要求,但是天狼星数据处理过程中不需刺点等,减少了人为误差,其处理后的数据精度要优于Inpho系统的常规数据处理精度。结果见表3—表5。
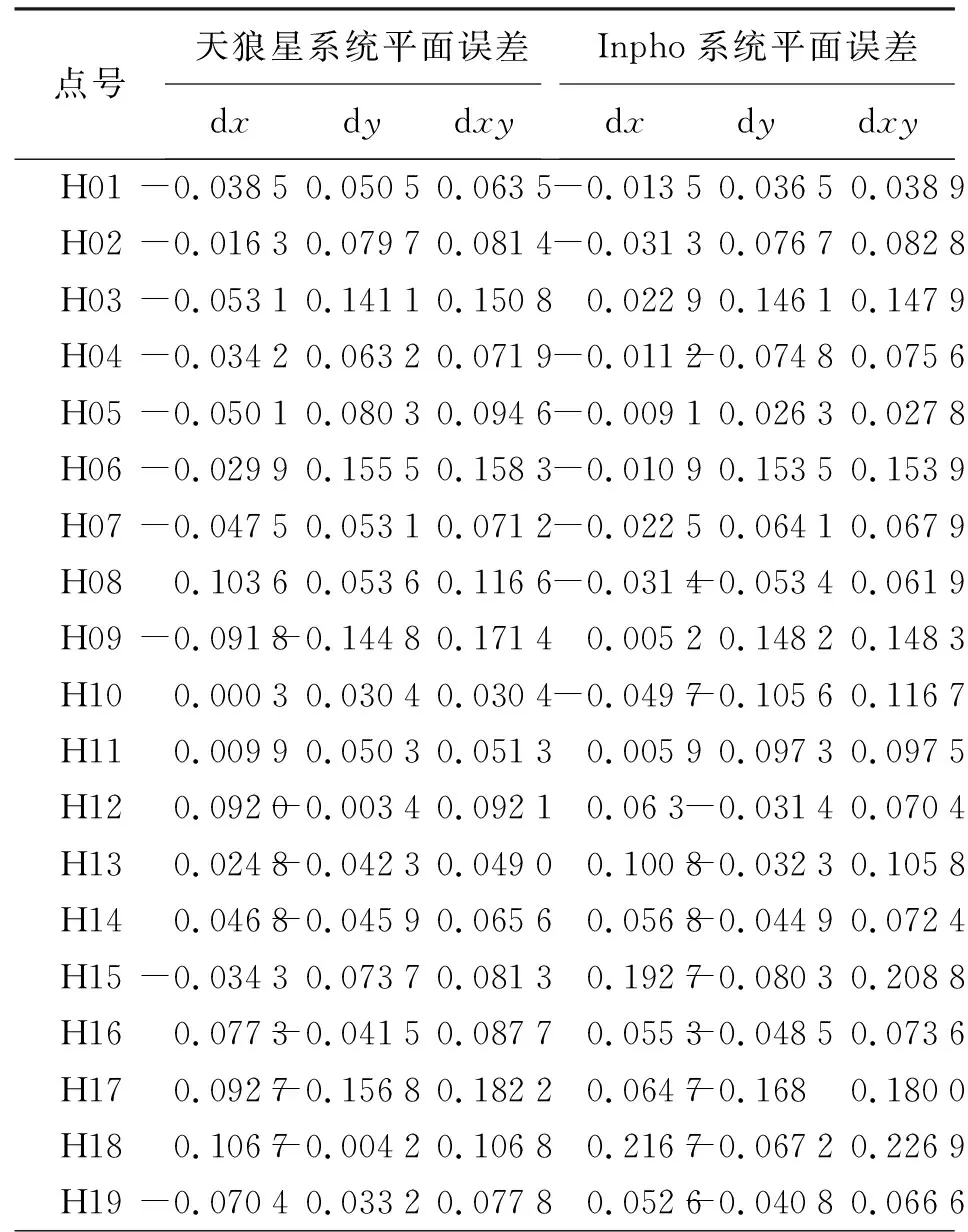
表3 天狼星航摄系统和Inpho检查点平面误差 m

续表3 m

表4 天狼星系统和Inpho系统高程检查点误差m
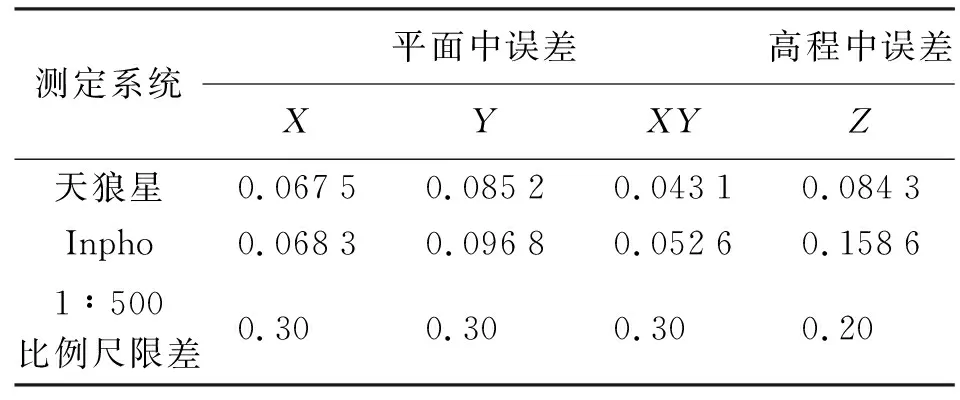
表5 天狼星航测系统和Inpho系统DOM、DEM中误差对比m
4 结 论
本文以吉林松原哈达山大坝为测试区,以1∶500大坝区天狼星无人机遥感影像为数据源,从数据的获取、数据后处理流程及操作性、DOM和DEM成图精度出发,探讨了免像控天狼星航摄系统和Inpho平台常规航测数据处理系统的优缺点,得出以下主要结论:
(1) Inpho航摄系统需要野外采集大量像控点进行辅助,空三解算需要内业刺点,还没有完全摆脱常规外业地形测量的约束。而天狼星航摄系统是免像控的摄影测量系统,野外只需测量基站点坐标,不需要另外布设像控点,而且优化了数据后处理作业的流程,减少了刺点和平差过程中的人为误差,可以实现免像控影像的一键式拼接处理,大大提高了数据后处理的效率和精度。
(2) 利用相同的平面和高程检查点分别对天狼星航摄系统和Inpho航摄数据处理系统制作的DOM、DEM成图精度进行检查,由于天狼星数据处理过程中不需刺点等,减少了人为误差的影响,其处理后的数据精度要优于Inpho系统的常规数据处理精度,而且两者都满足1∶500航空摄影测量对平面和高程中误差的限差要求。
