故障树分析法的现状与发展*
2018-07-04郭济鸣齐金平李兴运
□ 郭济鸣 □ 齐金平 ,3 □ 李兴运
1.兰州交通大学 机电技术研究所 兰州 730070
2.甘肃省物流及运输装备信息化工程技术研究中心 兰州 730070
3.甘肃省物流与信息技术研究院 兰州 730070
1 研究背景
故障树分析法将所要分析的系统问题以图形的形式进行表达处理,在分析步骤中,将所分析的系统发生故障设为顶事件,将无法再细分的事件称为底事件,将其余剩下的所有事件称为中间事件。故障树分析法将整个系统的最终故障及形成每一级故障的原因通过一个倒置的树形图来表达,对于系统处理计算,找出影响较大的环节进行分析,为系统运行和维修提供信息参考,在可靠性处理研究方法中所占的比重逐渐增大。由于该方法对于可靠性分析所具有的很多优势,因此近几年国内外各领域不断对其进行研究,促成其继续发展。
2 国内外发展历程
1961年,贝尔实验室最初以系统可靠性分析方法推出发表了故障树分析法,自此故障树分析法被许多学者认可应用,也因此得到了深入发展。现如今,该方法已经与多种其它学科和理论结合,非常广泛地应用于不同学科和区域。
1989年,Esary和Smotherman等通过故障树和马尔可夫模型结合,对阶段性动态进行了建模,以限制系统的灵活性,将相位变化通过分布函数表示,提高了求解速度。1992年,Dugan等以空间站和空中交通管理等系统为研究背景,将马尔可夫理论与组合数学应用到一起,研发了动态故障树模型,推算出了三种应用于动态故障树的模块化算法,解决了动态故障树计算速率慢的问题,并为解决关键应用程序中容错计算机程序的可靠性问题,给出了容错并行处理器、任务航空电子系统和容错多维数据集三种先进的容错计算机系统[1]。1996年,Pullum等对硬件、软件繁杂的计算机系统进行可靠性分析,得出了一种对动态和静态都可计算的Shade树方法。1997年,Gulati等通过计算独立子树得到的数据,归纳整合处理得出一种混合模块化方法,对于静态故障树应用二元决策图方案,对于动态故障树应用马尔可夫模型方案,同时,采用独立模块的独立解,再将方法结合进行整体处理[2]。
Ragavan为了简化动态故障树结构构建系统的表达,推算出更加精准的动态故障树计算应用算法,增强了针对系统故障问题的动态故障树框架的有效性,以更加严谨地确认故障树的构成和基本事件,使故障树得到更准确的表达,分析马尔可夫模型,提出数值解决方案。2003年,Ou等基于之前已经得出的成果又推理出了计算近似重要度无环马尔可夫可靠性结构的研究算法,对马尔可夫链计算问题结果进一步化简,针对非维护关键性计算机程序的可靠性,提出一种适用于任何非循环的马尔可夫链可靠性分析模型,通过近似计算来解决动态故障问题[3]。2007年,Boudali等以交互式马尔可夫链为背景,对于输入和输出端口进行模块化,以应对组合过大时计算爆炸和非模块化的问题,使用输入输出交互式马尔可夫链形式来分析动态故障树。使用这一形式,解决了模块分析的局限性对于状态空间爆炸问题的脆弱性问题,以及模块构建不成熟的问题[4]。
2008年,Marquez等将混合贝叶斯网络框架用于处理动态故障树的灵敏性、模糊性和故障率等问题。对于动态离散变量域的近似推理算法,获得了静态和动态故障树结构的故障分布准确逼近。对于已有的最初故障数据和专家判断先验信息,得到了参数化的边缘失效分布后验估计,得出了混合贝叶斯网络框架[5]。Duan等针对传统动态马尔可夫链方法的缺陷,结合线性时间算法,将整个大系统整体划分为独立子树,应用二元决策图对静态子树进行处理,同时用贝叶斯网络对动态子树进行分析计算[6]。Kolek等提出了动态故障树分析法、马尔可夫链和可靠性块图,并介绍了一个块库,以解决复杂可靠性结构、多种形式软件和硬件冗余,以及热冷备份系统等问题。采用蒙特卡罗模拟法,提出了一种基于工业的案例研究,通过故障模式和效果分析,对冗余可编程逻辑控制器系统的关键故障进行了识别[7]。
季会媛将动态故障树处理分为单独的静态子树和动态子树,再对其进行二元决断图法和马尔可夫过程计算处理。当动态子树规模比较小时,系统计算效率会提高。应用马尔可夫链法来得出动态子树的顶事件发生概率,利用马尔可夫状态转移图得到故障模式和对整体结构影响最大的事件,使整个系统的处理分析更加容易便捷[8]。朱正福等在状态转移图的基础上将马尔可夫链划分为几个状态转移链,由于链的长度不一样,因此计算出适用于不同链长的失效概率计算公式,避免对于难度较大的方程计算,使现实的案例分析更加可行[9]。李彦锋应用三角模糊数赋值零部件和系统的故障发生概率,将事先建立的动态故障树结构用来获得模糊马尔可夫结构。结合模糊数学中扩展定理和拉普拉斯-斯蒂尔切斯变换计算处理获得的结构,获取系统在特定时间的模糊故障率和模糊可靠度图像。同时应用贝叶斯网络和动态故障树对系统可靠性进行建模,将无效的动态故障树模型变换为贝叶斯网络模型,以此将模型求解的复杂度大大化简[10]。房丙午等通过已知的函数对条件概率表进行描述,解决了组合爆炸问题。由已获得的备件门故障原因和相应的贝叶斯网络结构特点,结合指数分布的备件节点故障时间特性,推理出基于动态故障树的贝叶斯网络精确算法,应用该算法提出了系统失效分布、部件重要度等概率公式[11]。孙丽娜等将传统二态性故障树变形为多态的Takagi-Sugeno模糊故障树系统,通过结合统计学期望来处理系统多态故障问题,并对底事件和中间事件处理得到多态系统可靠性的分析方法[12]。
3 贝叶期网络法
贝叶斯网络最开始是为了解决人工智能存在的因素无法确定的问题。贝叶斯网络通过图形表达系统故障间的联系,能够得出事件概率。如今,贝叶斯网络的问题主要在于如何创建、推算贝叶斯网络,以及学习功能方面。贝叶斯网络的主要建模方法如下:①根据相关领域专家的经验直接建模;②根据对网络训练数据进行学习来建模;③将专家知识库和网络数据学习组合利用后建模。对于系统的特点和条件差异,应用不同的建模方法。建造贝叶斯网络主要应用的是概率推理,特别是后验概率的分析。
贝叶斯网络为有向无环图,由节点和边构成。随机变量通过节点来代替,变量和变量的相互关系通过有向边来表达。贝叶斯网络赋予了有向图中全部变量的特定联合概率分布,通过获得节点的联合概率分布来获取某一事件的概率。贝叶斯网络结构成立的前提是随机变量相对独立。
贝叶斯网络中变量的联合概率分布为:

式中:Pa(Xi)为节点Xi的所有父节点变量集。
联合概率分布的连续函数形式为:

要想得到指定变量的边缘概率分布,需要得到联合概率分布。例如,假设有两个离散随机变量X和 Y,X 有 m 个状态,X={a1,a2,…am},Y 有 n 个状态,Y={b1,b2,…,bn},得到联合概率分布 P(X,Y),则能计算出X的边缘概率分布P(X):

式(3)的连续形式为:

4 动态逻辑门的贝叶斯网络表示
4.1 优先与门
如果节点事件A在节点事件B前失效,那么节点事件X与节点事件B同时失效。如果节点事件B在节点事件A前失效,那么节点事件X在将来无穷远的时间失效,如图1、图2所示。
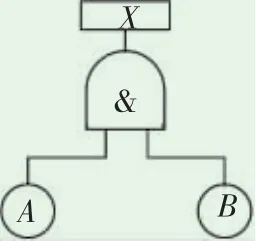
图1 优先与门

图2 优先与门贝叶斯网络图
优先与门输出的条件概率密度函数为:

节点的故障概率分布函数为:

考虑 x<∞,δ(x-∞)=0,则 X 在时间段[0,t]的故障发生概率为:

有n个输入事件的故障树与门,则X在时间段[0,t]的故障发生概率为:

4.2 优先或门
优先或门表示只有当第一个输入门,也就是故障树最左边输入门失效时,整个门才输出失效,如图3、图4所示。由图2、图4可见,优先与门和优先或门的贝叶斯网络图一致。

图3 优先或门

图4 优先或门贝叶斯网络图
优先或门输出的条件概率密度函数为:

优先或门输出的边缘概率分布函数为:

δ(x-∞)=0,则 X 在时间段[0,t]的故障发生概率为:

有n个输入事件的故障树或门,则X在[0,t]时间段的故障发生概率为:

5 马尔可夫链法
由于真实工程系统中零部件故障的形成很复杂,彼此间有很多联系,有的是静态的,有的是动态的,而且部件故障还存在发生顺序的问题,因此传统的静态故障树是无法准确表达零部件失效的原因和结果的,需要马尔可夫模型方法来解决这些问题。应用马尔可夫链法处理动态子树,先要将动态子树处理为对应的马尔可夫链,继而根据动态故障树状态转移图,获得故障模式和传递线路。对于状态转移图,若马尔可夫链最后的状态为系统故障,那么该链上的全部事件故障的转移关系称为系统的一种故障。从系统故障的状态开始,顺着马尔可夫链返回追踪,能够得到动态故障树系统的全部故障状态。
一条链在Δt时段内,事件发生概率为λij,状态i转移到状态j的转移概率为:

状态i的自身转移概率Pij(Δt)为:

链长为1的状态转移链如图5所示。

图5 链长为1状态转移链
令Pj(t)是该转移链使系统在时刻t处于链长为1状态的概率,那么,P(t)=(P0(t),P1(t))符合下列微分方程组及初始条件:

对于系统的状态转移链,由0到j若有链长为1的状态转移链T1,则Pj(t)在T1上的分量为:

式中:λ00>0;λjj≥0。
链长为2的状态转移链如图6所示。

图6 链长为2状态转移链
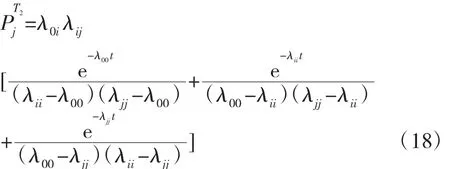
由0到j若有链长为2的状态转移链T2,则Pj(t)在T2上的分量为:
链长为n的状态转移过程如图7所示。

图7 链长为n状态转移链
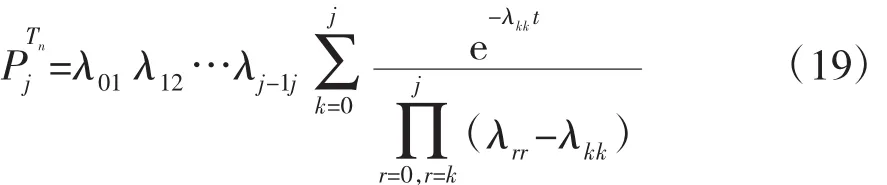
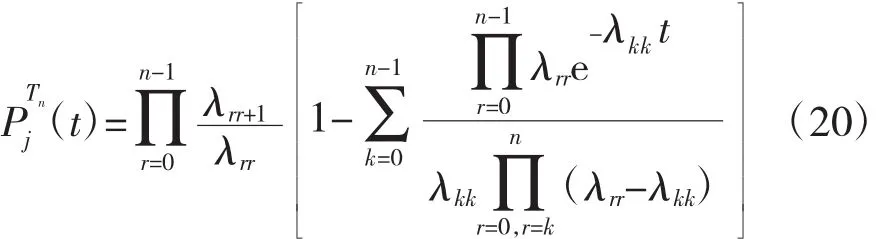
式中:j=1,2,…n;λkk>0;λjj≥0。
当 j=n 时,λnn=0,则有:
6 优缺点比较
6.1 贝叶斯网络法
贝叶斯网络所具有的条件独立的特性可以降低系统计算的难度,尤其适用于分析拥有随机性质的不确定动态时序系统。在计算的过程中,避开了组合爆炸,且所求得的计算结果精度会有所提高。同样也可以应用于对动态复杂系统备件节点失效的处理,因为可以表达系统的多态性和不确定性。
在应用贝叶斯网络时,会因为其固有的不确定性事件之间因果关系的缺陷,而需要确定事件间的关联概率,因此增大了网络构成的难度。对于建模的过程,需要相关科研人员不断进行改进,但处理过程可能反而变得麻烦。
6.2 马尔可夫链法
马尔可夫链法是利用状态空间矩阵的方法来描述系统中各个状态转移的随机过程,可以充分描述系统故障的顺序相关性、功能相关性、优先性等动态特点,具有对不确定性进行推理的能力。
应用马尔可夫链法处理分析较大的动态故障系统时,随着底事件及中间事件数量的增加,计算量会变得很大,而且应用马尔可夫链法是需要一定前提的,只有组成系统的所有部件的寿命和维修时间都满足指数分布时,才可以对其进行分析和处理。因此,马尔可夫链法无法在实际系统中得以广泛推广应用。
7 结束语
将故障树分析法应用于分析故障系统时,仅仅对系统总体采用了故障树建模,而未对系统每一个部分进行定性定量分析,因此还需要细化延伸对各模块分别处理。对于智能化分析的要求,也没有特定完善的故障树分析软件。
对于兼顾分析模糊不确定性和动态失效特性等条件下的故障树处理,现有成果仍然欠缺,因此导致应用现有研究手段来处理获得的数据与现实情况不匹配,甚至有很大的出入。于是,针对结合零部件动态故障特征和模糊无法确定的系统可靠性处理方法,其发展有很大空间。
针对上述有待改进的问题,相关学者提出可以从模块化的思维入手来对系统故障树建模,使所建立的故障树模型结构更加符合实际要求。将过于巨大的系统进一步细化分解,最终重新将故障树各个模块子树组合成整体进行分析。此外,对于分析处理某些效率较低的算法,出现计算机系统处理无法匹配的现象,算法设计者可以应用多线程并行处理计算的方法来攻克这些问题。
目前我国对于应用计算机作为辅助来建立故障树和计算机自行处理计算的研究还不是十分完善,普遍只是应用于试验阶段的单一制图,尚无法直接对故障树定性和定量处理。个别研究领域的学者开发出的软件只能应用于自身所在领域所特定的故障树定性和定量处理,尚无法随着系统条件的改变而随意更改故障树。由于存在诸多尚未解决的问题,因此故障树分析法还无法突破领域间的界限。
无论是马尔可夫链法,还是贝叶斯网络法,都是用于处理不确定问题的方法,可以在此基础上考虑研究结合其它不确定理论及处理方法,从而在多种类别问题上构造出更为适合不确定问题,且可以应用于更大范围的通用解决方法。
[1]DUGAN J B,BAVUSO S J,BOYD M A.Dynamic Fault-tree Models for Fault-tolerant Computer Systems[J].IEEE Transactions on Reliability,1992,41(3):363-377.
[2]GULATI R,DUGAN J B.A Modular Approach for Analyzing Static and Dynamic Fault Trees[C].Reliability and Maintainability Symposium.1997 Proceedings,Annual,Philadelphia,1997.
[3]OU Y,DUGAN J B.Approximate Sensitivity Analysis for Acyclic Markov Reliability Models[J].IEEE Transactions on Reliability,2003,52(2):220-230.
[4]BOUDALI H,CROUZEN P,STOELINGA M.Dynamic Fault Tree Analysis Using Input/Output Interactive Markov Chains[C].Dependable Systems and Networks,2007.DSN’07.37th Annual IEEE/IFIP International Conference on,Edinburgh,2007.
[5]MARQUEZ D,NEIL M,FENTON N.Solving Dynamic Fault Trees Using A New Hybrid Bayesian Network Inference Algorithm[C].Control and Automation,2008 16th MediterraneanConference on,Ajaccio,2008.
[6]DUAN R X,WAN G C,DONG D C.A New Assessment Method for System Reliability Based on Dynamic Fault Tree[C].Intelligent Computation Technology and Automation(ICICTA),2010 International Conference on,Changsha,2010.
[7]KOLEK L,IBRAHIM M Y,GUNAWAN I,et al.Evaluation of Control System Reliability Using Combined Dynamic Fault Treesand MarkovModels[C].Industrial Informatics(INDIN),2015 IEEE 13th International Conference on,Cambridge,2015.
[8]季会媛.动态故障树分析方法研究[D].哈尔滨:国防科学技术大学,2002.
[9]朱正福,李长福,何恩山,等.基于马尔可夫链的动态故障树分析方法[J].兵工学报.2008,29(9):1104-1107.
[10]李彦锋.复杂系统动态故障树分析的新方法及其应用研究[D].成都:电子科技大学,2013.
[11]房丙午,黄志球,李勇,等.基于贝叶斯网络的复杂系统动态故障树定量分析方法[J].电子学报,2016,44(5):1234-1239.
[12]孙利娜,黄宁,仵伟强,等.基于T-S模糊故障树的多态系统性能可靠性[J].机械工程学报,2016,52(10):191-198.
[13]王雪飞,李青,冯力.基于模型和故障树的飞机故障诊断方法[J].科学技术与工程,2017,17(20):308-313.
[14]张佳,贾向阳.基于故障树与Rete算法的电泵井工况诊断方法研究[J].现代电子技术,2017,40(2):34-38.
[15]陈卫东,张昌卫,琚选择,等.水下生产系统管汇的故障树分析[J].哈尔滨工程大学学报,2016,37(8):1022-1026.
[16]王炜俊.基于故障树法的城市轨道交通受电弓可靠性分析[J].科技创新导报,2016,13(1):59-61.
[17]张国喜,李晓钟.基于灰色关联故障树的运营期隧道病害风险研究[J].工程管理学报,2016,30(1):77-81.
[18]寇海霞,安宗文,刘波,等.基于贝叶斯网络的风电齿轮箱可靠性分析[J].兰州理工大学学报,2016,42(1):40-45.
[19]张军.故障树最小割集法在S76直升机故障诊断中的应用[J].航空维修与工程,2015(12):79-80.
[20]陈德道,安虎平,胡宗政.基于模糊理论的数控刀架故障诊断方法研究[J].组合机床与自动化加工技术,2015(10):84-87,90.
