环境激励下基于频域特征的扰动源定位方法
2018-06-26蔡国伟王丽馨杨德友
蔡国伟,王丽馨,杨德友
(东北电力大学 电气工程学院,吉林 吉林 132012)
0 引言
低频振荡已成为制约大规模电能远距离外送、威胁现代互联电网安全稳定运行的关键问题之一[1]。近年来,国内外电网中观测到的强迫功率振荡使得低频振荡问题更加复杂,引起了工程领域和学术界的广泛关注[2-3]。
采取有效的措施阻断扰动源是保证电网安全稳定运行的关键。而持续周期性功率振荡检测是强迫功率振荡扰动源定位以及采取抑制振荡措施的重要前提。在持续周期性扰动检测研究方面,文献[4]通过计算随机响应数据的周期图,将结果与设定阈值比较,从而检测系统中的周期性扰动;文献[5]以系统正常运行时的环境激励数据为基础,利用自相干函数法、互相干函数法检测淹没在系统中的持续周期性扰动。但上述2种检测方法对阈值的依赖性较大,阈值设定的精确性严重影响检测结果。在周期性扰动源定位研究方面,文献[6-8]对电力系统发生强迫功率振荡的能量进行分析,通过建立支路能量函数模型,根据其能量变化识别扰动源的大致方位;文献[9]通过离线混合动态仿真定位扰动源所在区域;文献[10]通过对多点电压行波进行检测,比较信号波形数据相似度,从而实现强迫功率振荡扰动源定位。上述定位方法主要是针对大规模周期性振荡的时域响应信号的处理分析,对于含有小幅周期性扰动的系统正常运行时的随机响应信号的分析难以达到理想的效果。
本文通过推导环境激励与小幅周期性扰动共同作用下系统响应的数学解析表达式,深入分析了环境激励下系统小幅周期性扰动的频域特征,进而提出了环境激励下基于频域特征的电力系统持续周期性扰动特征识别及扰动源定位方法。数值仿真计算结果验证了本文所提方法在周期性扰动检测及扰动源定位方面的可行性和有效性。
1 环境激励下系统动态响应特征
实际运行过程中,负荷波动、新能源有功输出的随机性、发电机受到持续周期性扰动等均会给系统带来随机扰动。以负荷随机波动和发电机励磁器受到周期性扰动为例,电力系统动态模型可以用如下的随机微分代数方程形式描述[11]:
(1)
0=g(x,y,u)
(2)
其中,f和g为连续函数;x∈Rnx(nx为系统状态变量的数目)为系统的状态变量,如发电机功角等;y∈Rny(ny为系统代数变量的数目)为系统的代数变量,如母线电压、母线相角等;u为随机波动变量。式(1)为系统微分方程,描述了系统中发电机及相应的控制装置、负荷等的动态过程;式(2)为系统的代数方程,一般由系统潮流方程及发电机、负荷等静态方程组成。
假设负荷随机波动服从OU(Ornstein-Uhlenbeck)分布,发电机受到持续周期性扰动,建立随机波动的系统动态模型[12-13]:
(3)

式(1)—(3)共同构成了负荷随机波动下电力系统的随机微分-代数方程SDAE(Stochastic Diffe-rential Algebraic Equation)。
随机扰动过程中,电力系统的运行状态未发生变化,即各台发电机的运行平衡点不变,则可以通过线性化系统状态来近似分析系统状态变量的动态过程。线性化式(1)—(3),同时消除代数变量y,则有:
(4)
其中,fx、fy分别为式(1)中对应于x、y的雅可比矩阵;gx、gy、gu分别为式(2)中与变量x、y、u对应的雅可比矩阵;Δx为状态变量偏移量;Δu为随机波动量偏移量;Inu为单位对角阵。

(5)
式(5)即为发电机受到周期性扰动和负荷随机波动下,电力系统的线性化状态空间模型。求解得到系统n1个振荡模式对应的特征值λr=σr+jωr(r=1,2,…,n1),则系统状态变量的时域解析表达式为:
(6)
其中,vr为系统左特征向量;ur为系统右特征向量;z(0) 为状态变量初始值;φr为初始相角;δ、ξ、ω分别为某一时刻对应的噪声强度大小、高斯随机分布的变量、扰动频率。
若系统实际运行过程中只含有负荷随机波动,不存在持续周期性扰动,则系统状态变量时域解析表达式为:
(7)
结合式(6)、(7)可以看出,相较于单一负荷随机波动下的系统动态响应,系统负荷随机波动的同时发电机受到周期性扰动的情况下,系统响应多含有一个周期分量,即系统动态响应由振荡分量、随机分量和周期分量三部分构成。如果周期性扰动的扰动频率与自然振荡频率有一定差距等原因导致周期性扰动分量幅值很小,则周期性扰动容易淹没在类噪声中,使得测量得到的有功功率、电压等系统随机响应的外在表现为杂乱无章的类似噪声的随机响应信号。通过对式(6)的分析不难发现,看似无章可循的随机响应信号实际蕴含着丰富的系统动态特征。
2 基于频域特征的强迫振荡检测与扰动源定位
系统正常运行过程中,时刻存在负荷投切等随机性质小扰动,系统响应表现为类似噪声的小幅波动,若外施扰动频率与系统固有自然振荡频率有一定差距等原因使得系统周期性扰动引起系统联络线有功功率、电压等发生的周期振荡幅值较小,容易淹没在类似噪声的系统随机响应信号中。从时域响应的外在表征上很难对单一的系统随机响应信号和含有小幅周期性扰动的随机响应信号加以区分,如图1所示。将系统时域响应转换至频域进行分析是目前电力系统功率振荡常用的分析法。研究表明,系统正常运行情况下,随机响应的频域特征与系统固有振荡特征相同,系统各变量的时域响应与式(7)所示的解析表达式特征一致。当系统中遭受幅值较小的持续周期性扰动时,系统响应为随机响应与持续周期性扰动响应之和,如式(6)所示。由于持续周期性振荡阻尼比为0,使得遭受周期性扰动时系统的频域响应为系统固有振荡模态与阻尼比近似为0的周期性振荡模态的集合,则可以通过环境激励下系统的频域响应特征实现强迫功率振荡的检测。当系统频域响应中模态个数大于系统固有模态个数,且其中含有阻尼比近似为0的模态时,即可认为系统中存在周期性扰动。
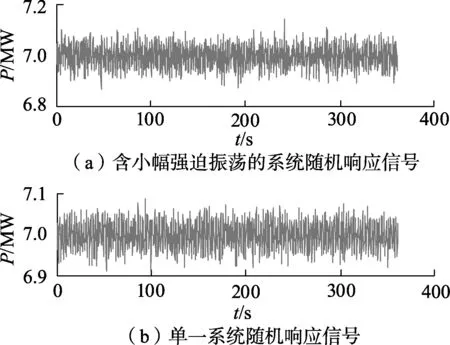
图1 2种随机响应信号波形Fig.1 Waveforms of two kinds of random response signals
研究表明,系统受到扰动后,系统中的频率、发电机功角、有功功率等机电状态变量的变化以较慢的速度在机网耦合的电力系统中传播,扰动点附近的发电机的输出功率首先发生变化,其转子的转速在不平衡力矩的作用下发生改变,发电机偏离其运行平衡点导致系统其他状态变量和运行变量发生变化,使得其他发电机的有功输出发生变化,进一步影响更多网络中发电机变量的运行状态[13-14]。依照这种规律,系统中的扰动以扰动点为中心不断向外传播。对于周期性扰动而言,扰动源所在机组的有功输出首先受到外施扰动源的持续作用而发生变化,随着扰动在系统中的扩散传播,影响其他发电机的机电状态变量,即扰动源所在机组的频率、功角等机电状态变量的初始相位超前于其他机组,在模态图中表现为扰动源所在机组的模态相位超前于其他机组,且与扰动源所在机组电气距离越近的机组,其模态相位越贴近扰动源的模态相位,因此,可以利用模态图中各发电机模态相位间的关系实现扰动源定位[15]。
环境激励下基于频域特征的周期性扰动检测与扰动源定位流程如图2所示。

图2 基于频域特征的扰动源定位流程图Fig.2 Flowchart of locating disturbance source based on frequency-domain characterization
3 基于随机子空间法的频域特征识别
3.1 随机子空间算法基本理论
在实际应用中,量测数据在时间上都是离散的,经离散采样后,可得如下随机状态空间系统[16]:
(8)
其中,xk∈Rn为系统状态量,n为系统阶数;yk∈Rn为测量得到的输出量;wk∈Rn和vk∈Rl均为假定白噪声,且均值E(wk)=E(vk)=0;Ad∈Rn×n和C∈Rl×n分别为系统状态矩阵和输出矩阵;Δt为采样间隔。
对式(8)所示的随机系统,由采样时序数据组成Hankel矩阵:
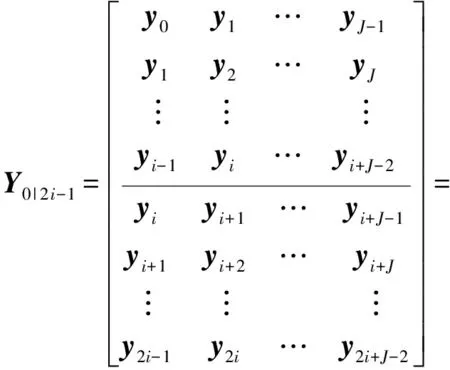
(9)
其中,i=2n;J为量测量采样数。
令正交投影所得矩阵为:
Oi=Yf/Yp
(10)
(11)
计算Oi的奇异值分解(SVD)值为:
W1OiW2=USFT=
(12)

那么延伸可观察矩阵Γi和Γi-1可表示为:
(13)
Γi-1=Γi
(14)
利用式(10)、(11)、(13)和(14)可得Kalman滤波状态序列:
(15)
(16)
其中,†表示相应矩阵的伪逆。
将式(9)、(15)和(16)代入式(17)即可计算得到状态矩阵及输出矩阵:
(17)
离散系统状态矩阵Ad确定之后,对其进行特征值分解:
Ad=ψΛψ-1
(18)
其中,Λ=diag(ηj)∈Rn×n(j=1,2,…,n),ηj为离散系统特征值;ψ为系统特征向量。
根据离散系统与连续系统的特征值之间的关系,得到连续时间系统特征值为[17]:
λj=aj±bj=(lnηj)/Δt
(19)
进而求得系统振荡频率及阻尼比为:
(20)
系统的模态振型定义为输出点处的系统特征向量:
φ=Cψ
(21)
3.2 随机子空间算法定阶原则
为了确定辨识系统的阶数,将系统真实的机电振荡模式与虚假模式区分开,本文考虑奇异值分解定阶原则[18]。
依据式(12)将奇异值分解得到的结果与设定阈值(s1/1 000)比较,从而确定系统阶数。
(22)
3.3 基于随机子空间算法的扰动源检测与定位
当周期性扰动幅值较小时,很容易淹没在环境激励下类噪声随机响应中,而这类小幅振荡也可能演变成大幅度的功率振荡。及时检测出小幅周期性扰动并准确定位扰动源,对于电网安全稳定具有重要意义。本文利用随机子空间辨识(SSI)算法进行小幅持续周期性扰动的检测与扰动源定位,具体分析流程如下:
a. 利用广域测量系统采集得到系统各台发电机有功功率随机响应数据;
b. 由采样时序数据组成SSI算法的Hankel矩阵;
c. 将采集得到的系统各发电机有功功率结果作为SSI算法的输入,计算得到系统状态矩阵Ad及输出矩阵C,进而得到系统的振荡模式及相关机电振荡参数;
d. 依据SSI算法得到的系统机电振荡模态参数及模态振型信息,利用本文第2节的理论分析进行系统扰动源的检测与定位。
4 计算与分析
4.1 IEEE 4机2区域系统
IEEE 4机2区域系统结构如图3所示,数据参见文献[11]。
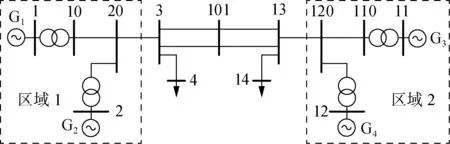
图3 IEEE 4机2区域系统接线Fig.3 Wiring diagram of IEEE 4-generator 2-area system
利用小干扰稳定分析算法(SSAT)提取基础运行方式下系统的机电振荡模式,计算得到1个区域间振荡模式、2个本地振荡模式,结果见表1。3个机电振荡模式对应的振荡模态见图4。

表1 IEEE 4机2区域系统特征值分析结果Table 1 Eigenvalue analysis results of IEEE 4-generator 2-area system
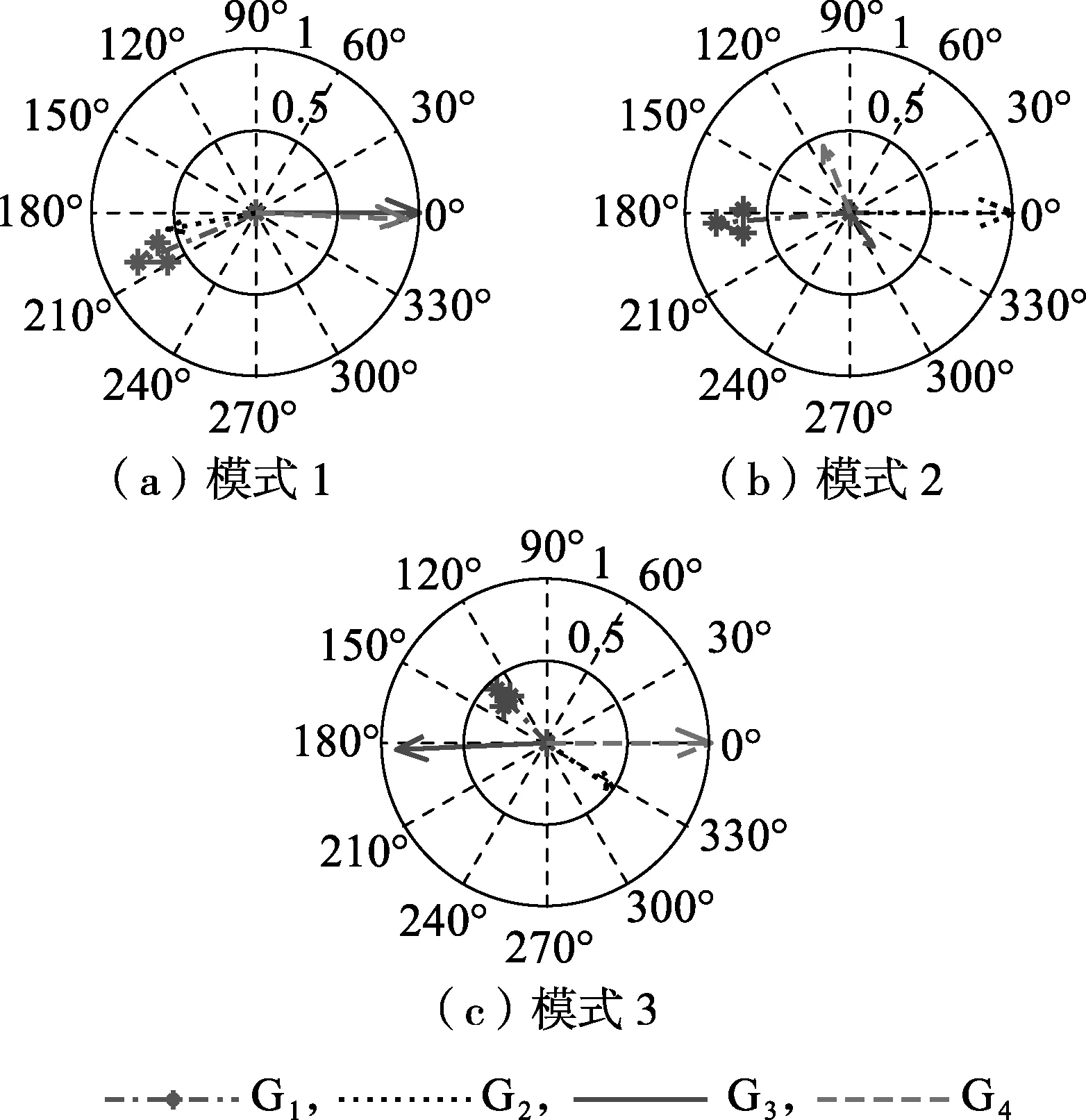
图4 IEEE 4机2区域系统模态振型图Fig.4 Modal vibration of IEEE 4-generator 2-area system
假设节点4及节点14处的负荷以基础值的5%随机波动,同时系统中发电机外施周期性扰动。本文模拟了以下2种小幅周期性扰动。
Case 1:G2的励磁器外施周期性扰动F0sin(ωt)=0.005sin(2πf1t),其中f1=0.8 Hz。
Case 2:G3的励磁器外施周期性扰动F0sin(ωt)=0.002sin(2πf2t),其中f2=1.1 Hz。
利用电力系统时域仿真软件获取系统时域响应。负荷随机波动,Case 1情况下,系统中4台发电机有功功率输出的时域响应曲线如图5所示。
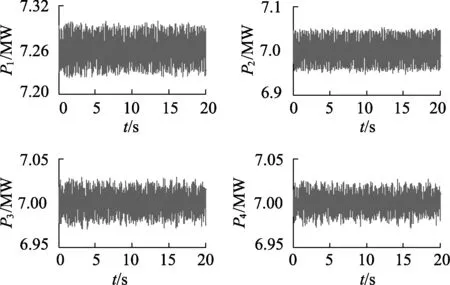
图5 发电机有功功率时域响应曲线Fig.5 Active power time-domain response curves of generators
本文外施周期性扰动频率分别为0.8 Hz和1.1 Hz,与系统固有振荡频率均有一定的差距,故未能在系统中引发大幅度的功率振荡。从本文第1节可知,若周期性扰动响应信号的幅值较小,容易淹没在类似噪声的系统随机响应信号中,从系统时域响应信号的外在表征上很难对单一的系统随机响应信号和含有小幅周期性扰动的系统随机响应信号加以区分,如图5所示。
本文以系统中各台发电机的有功功率随机响应信号数据为基础,利用SSI算法求取系统振荡频率及阻尼比。选取时长为20 s的窗口数据作为计算输入,每10 s滑动一次计算窗口数据,20 min内的计算统计结果如表2所示。对比表1、2可知,表2中,Case 1和Case 2前3个振荡模式的频率及阻尼比的统计均值与基础运行方式下的机电振荡参数十分接近;表2中检测到的第4个振荡模式不属于系统固有的机电振荡模式,Case 1和Case 2这2种扰动方式下,该振荡模式频率辨识结果均值分别为0.800 3 Hz和1.100 2 Hz,分别与G1和G3励磁器外施的持续周期性扰动频率基本相等,阻尼比辨识结果均值为0.04 %和0.002 %,十分接近于0,故根据本文提出的小幅周期性扰动检测方法,很好地检测出了淹没在随机响应中的周期性扰动。
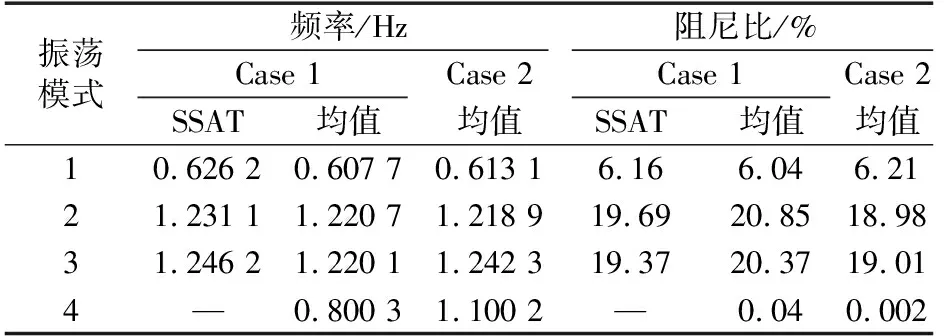
表2 IEEE 4机2区域系统辨识结果Table 2 Identification results of IEEE 4-generator 2-area system
时长为20 s的窗口数据作为计算输入,每10 s滑动一次计算窗口数据,SSI算法20 min内辨识得到的4个机电振荡模式和1个强迫功率振荡模式的频率-阻尼比关系图如图6所示。分析图6可以看出,各振荡模式每次滑动窗内辨识的系统频率及阻尼比结果均以基础运行值为中心,在其周围分布,辨识结果基本上与基础运行值接近,同时检测到的周期性扰动的频率与外施扰动频率基本接近,且阻尼比近似为0,辨识效果良好。
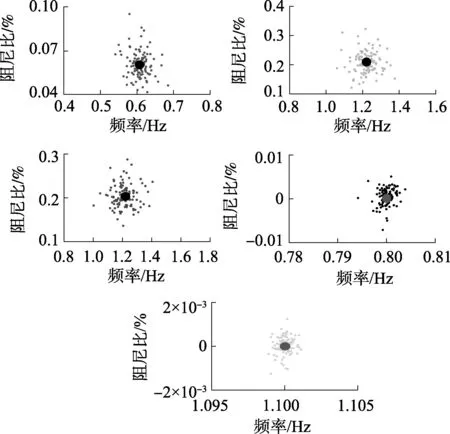
图6 IEEE 4机2区域系统频率-阻尼比关系Fig.6 Frequency-damping ratio relationship of IEEE 4-generator 2-area system
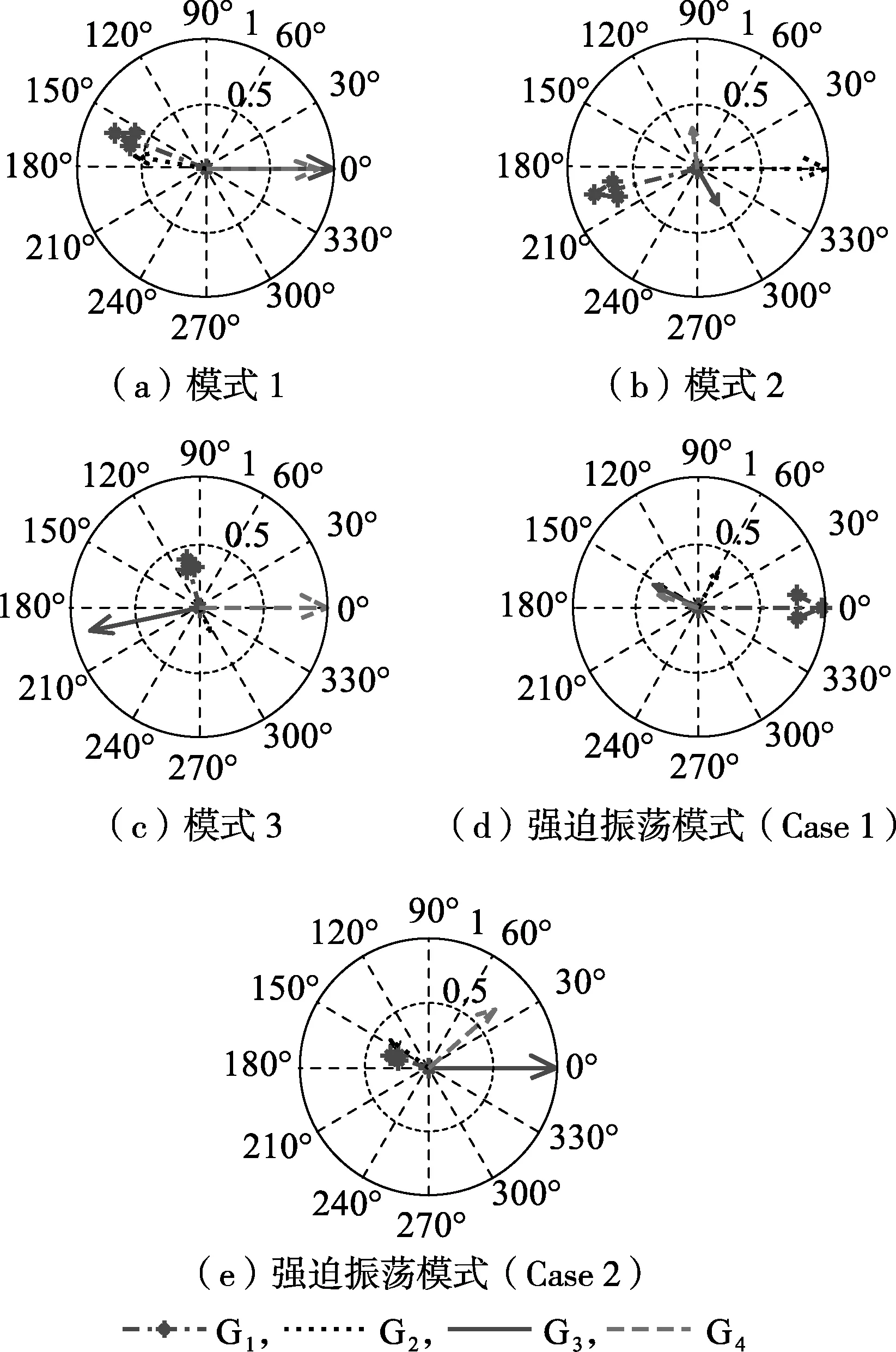
图7 IEEE 4机2区域系统模态辨识结果Fig.7 Modal identification results of IEEE 4-generator 2-area system
SSI算法辨识得到的机电振荡模态图见图7。图7(a)—(c)分别为系统固有的区域间振荡模式和2个本地振荡模式;图7(d)为G2外施周期性扰动时,小幅周期性振荡模式的模态振型;图7(e)为G3外施周期性扰动,周期性扰动模式的模态振型。
由图7(d)可以看出,Case 1扰动方式下,G2首先受到扰动冲击,然后扰动以G2为中心向外传播扩散,冲击与其电气距离较近的同一个区域的G2,接着扰动沿着区间联络线等输电线路向外传播,最后冲击了另一个区域的G3和G4。G2的初始相位超前于系统其他机组,根据图2所示扰动源定位方法,G2即为扰动源。同时,与G2电气距离小的G2的滞后角度小于与G2位于不同区域的G3和G4。图7(e)为扰动源位于G3的系统模态振型图。分析可知,G3超前于系统其他机组,即为扰动源所在位置,且与其较近的同区域G4的滞后角度远小于另一个区域内的发电机。因此,Case 1和Case 2这2种扰动方式下均得到了准确的扰动源位置,验证了本文所提扰动源定位方法的准确性和有效性。
4.2 IEEE 16机68节点系统
IEEE 16机68节点系统结构、数据见文献[5]。
与IEEE 4机2区域系统分析过程相同。首先,对系统进行小干扰稳定分析,获得基础运行方式下系统的机电振荡模式。对于实际系统而言,区间振荡相对于局部振荡更容易出现弱阻尼振荡模式,并且区间振荡影响范围更广泛,本文主要对IEEE 16机68节点系统的区间振荡模式进行分析。计算分析得到4个区间振荡模式,结果如表3所示。4个机电振荡模式对应的振荡模态见图8。
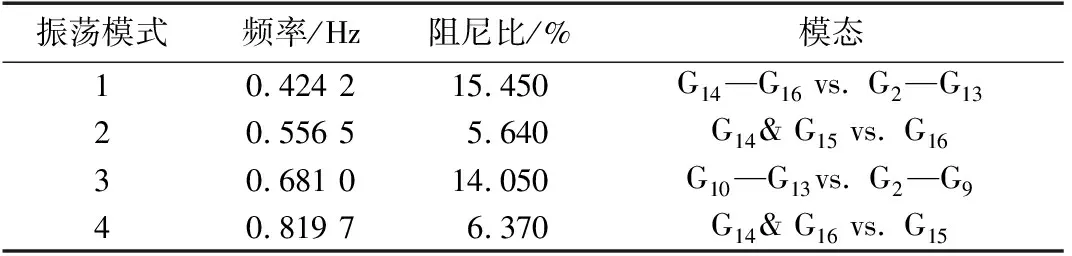
表3 IEEE 16机68节点系统特征值分析结果Table 3 Eigenvalue analysis results of IEEE 16-generator 68-bus system

图8 IEEE 16机68节点系统振荡模态Fig.8 Oscillation modes of IEEE 16-generator 68-bus system
假设系统所有负荷均以基础值的5% 随机波动,G2的励磁器外施周期性扰动F0sin(ωt)=0.008×sin(2πft), 其中f=0.6 Hz,模拟系统中持续小幅周期性扰动。
以系统中各发电机的有功功率随机响应数据为基础,利用SSI算法分析得到系统的振荡频率及阻尼比。选取时长为30 s的窗口数据作为计算输入,每10 s滑动一次计算窗口数据,60 min内的计算统计结果见表4。通过表3、4的对比分析可知,利用SSI算法共辨识得到5个频率在0.2~1.0 Hz之间的区域间振荡模式,其中表4前4个模式的频率及阻尼比均值与基础运行方式下的频率及阻尼比接近;表4中第5个振荡模式的频率均值为0.6010 Hz,与系统G1励磁器外施的周期性扰动频率基本一致,阻尼比均值为0.06%,近似等于0,故判断其为周期性扰动。

表4 IEEE 16机68区域系统辨识结果Table 4 Identification results of IEEE 16-generator 68-bus system

图9 IEEE 16机68节点系统模态辨识结果Fig.9 Modal identification results of IEEE 16-generator 68-bus system
图9为IEEE 16机68节点系统的模态辨识结果,从周期性扰动模态图及其局部放大图可以看出,G2的模态相位要超前于其他发电机,由此可以确定扰动源位于G2处。故G2首先受到扰动的冲击,同时扰动沿着传输线路传播扩散,由近及远依次冲击系统中其他发电机。
5 结论
本文在深入分析了环境激励下系统动态响应特征的基础上,利用SSI算法识别了淹没在随机响应信号中的小幅周期性扰动,同时利用模态振型实现扰动源定位,仿真分析与计算表明:
a. 单一环境激励与环境激励和小幅周期性扰动耦合作用下的系统响应外在表征近乎一致,很难根据系统时域响应数据实现小幅周期性扰动的检测,本文从频域的角度,提取系统特征信息,实现小幅周期性扰动的检测,具有较强适应性;
b. 相较于现有的基于故障录波数据的强迫功率振荡扰动源定位方法,本文以环境激励信号为分析基础,在大规模振荡发生前及时定位扰动源位置,为强迫功率振荡扰动源定位提供了新途径;
c. SSI算法在处理随机响应信号方面具有其独特优势,使得本文方法在准确识别系统振荡参数检测出强迫振荡的同时,能够得到不同振荡模式的模态振型,进而实现系统强迫功率扰动源的准确定位。
本文基于随机响应信号检测小幅周期性扰动及扰动源定位是为了更好地实现周期性扰动的控制,如何利用检测及扰动源定位结果更好地抑制系统中的小幅周期性扰动是下一步需要考虑的问题。
参考文献:
[1] 秦超,曾沅,苏寅生,等. 基于安全域的大规模风电并网系统低频振荡稳定分析[J]. 电力自动化设备,2017,37(5):100-106.
QIN Chao,ZENG Ruan,SU Yinsheng,et al. Low-frequency oscil-latory stability analysis based on security region for power system with large-scale wind power[J]. Electric Power Automation Equipment,2017,37(5):100-106.
[2] 刘辉,杨寅平,田云峰,等. 电力系统强迫功率振荡实例及机理分析[J]. 电力系统自动化,2012,36(10):113-117.
LIU Hui,YANG Yinping,TIAN Yunfeng,et al. Instances and mechanism analysis of forced power oscillation in power systems[J]. Automation of Electric Power Systems,2012,36(10):113-117.
[3] 徐衍会,马骢,邓小文,等. 汽轮机阀门控制方式切换引发低频振荡的实例及其机理分析[J]. 电力自动化设备,2015,35(3):170-174.
XU Yanhui,MA Cong,DENG Xiaowen,et al. Case of low-frequency oscillation induced by steam turbine valve control mode switchover and its mechanism analysis[J]. Electric Power Automation Equipment,2015,35(3):170-174.
[4] FOLLUM J,PIERRE J W. Detection of periodic forced oscillations in power systems[J]. IEEE Transactions on Power Systems,2016,31(3):2423-2433.
[5] ZHOU N. A cross-coherence method for detecting oscillations[J]. IEEE Transactions on Power Systems,2016,31(1):623-631.
[6] 陈磊,闵勇,胡伟. 基于振荡能量的低频振荡分析与扰动源定位(一):理论基础与能量流计算[J]. 电力系统自动化,2012,36(3):22-27.
CHEN Lei,MIN Yong,HU Wei. Low frequency oscillation analysis and oscillation source location based on oscillation energy part one:mathematical fundamental and energy flow computation[J]. Automation of Electric Power Systems,2012,36(3):22-27.
[7] 余一平,闵勇,陈磊,等. 基于能量函数的强迫功率振荡扰动源定位[J]. 电力系统自动化,2010,34(5):1-6.
YU Yiping,MIN Yong,CHEN Lei,et al. Disturbance source location of forced power oscillation using energy functions[J]. Automation of Electric Power Systems,2010,34(5):1-6.
[8] 杨东俊,丁坚勇,李继升,等. 基于参数辨识的强迫功率振荡扰动源定位方法[J]. 电力系统自动化,2012,36(2):26-30.
YANG Dongjun,DING Jianyong,LI Jisheng,et al. A disturbance source location method for forced power oscillations based on para-meter identification[J]. Automation of Electric Power Systems,2012,36(2):26-30.
[9] MA J,ZHANG P,FU H,et al. Power system event location analysis using wide-area measurements[J]. IEEE Transactions on Smart Grid,2010,1(3):340-346.
[10] 董清,张玲,颜湘武,等. 电网中强迫共振型低频振荡源的自动确定方法[J]. 中国电机工程学报,2012,32(28):68-75.
DONG Qing,ZHANG Ling,YAN Xiangwu,et al. Automatic locating source method of compelled resonance low frequency oscillation in power grid[J]. Proceedings of the CSEE,2012,32(28):68-75.
[11] KUNDAR P. Power system stability and control[M]. New York,USA:McGraw-Hill,1944:485-515.
[12] FEDERICO M,RAFAEL Z M. A systematic method to model power systems as stochastic differential algebraic equations[J]. IEEE Transactions on Power Systems,2013,28(4):4537- 4544.
[13] THORP J S,SEYLER C E,PHADKE A G. Electromechanical wave propagation in large electric power systems[J]. IEEE Transactions on Circuits & Systems I Fundamental Theory & Applications,2002,45(6):614-622.
[14] 刘巨,孙海顺,文劲宇. 交流互联电网中大扰动对联络线的冲击特性分析方法[J]. 电力系统自动化,2013,37(21):17-22.
LIU Ju,SUN Haishun,WEN Jinyu. A method for analyzing large disturbance impact characteristics on tie-line in AC interconnected power grid[J]. Automation of Electric Power Systems,2013,37(21):17-22.
[15] MASLENNIKOV S,WANG B,ZHANG Q,et al. A test cases library for methods locating the sources of sustained oscillations[C]∥Power and Energy Society General Meeting. Boston,MA,USA:IEEE,2016:1-6.
[16] OVERSCHEE V,DEMOOR P B. Subspace identification for linear systems[M]. Amsterdam,Netherlands:Kluwer Academic Publishers,1996:7-93.
[17] LIU G,QUINTERO J,VENKATASUBRAMANIAN V. Oscillation monitoring system based on wide area synchrophasors in power systems[C]∥Bulk Power System Dynamics and Control-Ⅶ:Revitalizing Operational Reliability. [S.l.]:IEEE,2007:1-13.
[18] 潘学萍,刘良,杜春雷,等. 选择合适的观测量提取电力系统的振荡特征[J]. 电力系统及其自动化学报,2015,27(2):51-56.
PAN Xueping,LIU Liang,DU Chunlei,et al. Measurement selection for estimating oscillation characteristics in power systems[J]. Proceedings of the CSU-EPSA,2015,27(2):51-56.
