基于离散分组一致性算法的双母线孤岛直流微电网自适应下垂控制
2018-06-26李晓晓王晓兰
李晓晓,王晓兰,2
(1. 兰州理工大学 电气工程与信息工程学院,甘肃 兰州 730050;2. 甘肃省工业过程先进控制重点实验室,甘肃 兰州 730050)
0 引言
现如今,微电网是电力行业中最具创新性的领域之一。未来微电网既可以作为配电网的能量平衡单元,又可以作为独立电网为社区供电[1]。而直流微电网具有转换次数少、控制结构简单、不需要对电压的相位和频率进行跟踪、不需要考虑传输过程中的涡流损耗和无功补偿等优点,是以新能源发电为主的微电网系统更为理想的解决方案。
直流母线电压是反映直流微电网系统内功率平衡的唯一指标[2],所以直流微电网控制的重要目标就是通过整个系统的协调控制,使得系统输入、输出功率达到平衡,从而维持直流母线电压的稳定。文献[3]提出的基于直流母线电压信号DBS(DC Bus Signal)的能量协调控制方法,只能实现基本的功率和能量分配。由于母线电压随运行点变化而变化、线路阻抗未知或分布不均,DBS控制方法并不能达到很好的功率分配效果[4]。而点对多点的集中式通信控制又对通信网络实时性具有严苛的要求,并且其结构并不适用于微源、负载较分散的直流微电网系统。所以,基于稀疏通信网络、点对点的分布式多代理MA(Multi Agent)一致性协调控制受到越来越多的关注[5]。Olfati-Saber在2004年首先系统地提出了多智能体网络一致性问题的理论框架,并给出了基于一致性控制协议的基本形式[6]。随后Ren等[7]在其基础上,研究了具有固定拓扑与切换拓扑的有向加权网络一致性问题,并分析指出当系统拓扑中包含有向生成树时,系统能够达到一致。与文献[6]相比,该结论具有较弱的保守性。随后大量研究与分析表明,一致性算法的性能与网络拓扑结构的连通性密切相关。文献[5,8-10]将通信网络的连通性与微电网中控制增益以及算法边界权值做了相关性研究。其中,文献[5]分析了传统无通信控制的局限性,提出了基于离散一致性的自适应下垂控制策略,以全网平均电压差为一致性优化目标,实现了高精度负荷分配以及电压调节;文献[8-9]研究了一致性算法在共享公共连接点(PCC)连接的直流微电网簇中的应用,包括一致性算法在每个微电网单元的平均输出电流以及核心总线电压获取上的实现;文献[10]通过获取节点总注入功率与参与优化控制终端总数的全局信息,计算本地换流站满足特定目标函数的功率和电压参考值,实现全局的自律分散控制。
以上关于直流微电网一致性的研究均基于单母线结构,其优化控制目标具有唯一性。对于孤岛模式下区域直流微电网供电系统而言,双层式母线结构对单母线结构进行了高低压分层设计,提高了低压设备供电的安全性及兼容性[11],较单母线结构更加实用。文献[12]提出了一种针对双母线直流微电网的协调控制策略,根据双母线各自的电压信号,制定针对各个微源以及双母线之间能量变换器的协调控制策略和能量管理方案,但由于其依赖于母线电压信号来判断系统工作状态,并不能做到高精度的功率分配。
Yu等首先研究了分布式多智能体的分组一致性问题[13],得到了保证系统实现分组一致的若干条件判据,并通过对比实验说明了多智能体系统中各个子系统间的信息交互能够加快各个子系统的一致性收敛速度;同时文献[14]研究了基于离散时间的多智能体分组一致性问题,这对多母线结构的直流微电网一致性控制研究具有积极的意义。本文在此基础之上提出一种基于双母线直流微电网的分组一致性控制策略,与传统单母线结构一致性控制策略相比,其增强了系统的兼容性及功率分配优化的能力。
1 系统构成
分布式控制的直流微电网系统充分利用了“分布”的特征,很大程度上依赖于本地控制,可靠性更高[11]。直流微电网可以通过并网变换器与大电网连接,运行于并网模式,由大电网充当松弛终端,平衡系统功率;也可以运行于不依赖大电网的孤岛模式,由分布式电源、负载依情况成为松弛终端,维持系统功率平衡。为了简化分析,本文仅考虑其孤岛运行时的双母线协调控制,即系统分别由高/低压母线下的交流微源、直流微源、负载构成,结构见图1。

图1 双母线直流微电网结构Fig.1 Structure of DC microgrid with two buses
图1中,箭头所示为能量流动方向。高、低压母线分别实现区域自治,控制算法给定各区域运行参数的参考值,根据各个设备终端运行模式的不同,动态转换目标松弛终端,并且只有当某一区域能量匮缺而另一区域能量盈余时,位于中间的能量交换设备才运行工作,以确保系统整体经济、有效地运行。
交流微源采用直驱永磁风力发电机组DD-PMSG(Direct-Drive Permanent Magnet Synchronous Generator),通过电压型脉宽调制(PWM)变流器并入直流母线。正常情况下变流器工作于最大功率点跟踪MPPT(Maximum Power Point Tracking)模式,但在特定负载情况下,需要限功率运行。直流微源采用蓄电池储能BES(Battery Energy Storage),通过双向DC/DC变换器并入直流母线,其具有功率平衡的重要作用,为整个微电网系统提供电压和频率支撑,特定情况下,需要脱网以实现自我保护。
2 双母线直流微电网的分层控制
2.1 无连线阻性下垂控制存在的问题
双母线6节点直流微电网的戴维南等效模型如图2所示。传统阻性下垂控制方程如下[5]:
Uoi=Uref-RdiIoii=1,2,…,nnode
(1)
其中,Uoi为变流器输出电压;Uref为输出电压的参考值;Ioi为输出电流;Rdi为阻性下垂控制系数;nnode为节点总数。中间能量变换器考虑为理想能量传输部件,由式(1)可知,若要实现双母线区域功率自治,即要使变流器输出功率按自身额定功率成比例分配,各节点输出电压、电流应满足如下关系:
(2)
其中,ni-j为变流器i、j的额定功率比;Zlinei、Zlinej分别为变流器i、j对应端口与PCC之间的等效线路阻抗。图2中ZlineX为高、低压母线间等效线路阻抗。可见当线路阻抗情况复杂时,固定的阻性下垂控制系数并不能恒满足式(2),同时当微源输出功率增大时,其输出电压有可能会超出±5%的母线电压变化量限制。
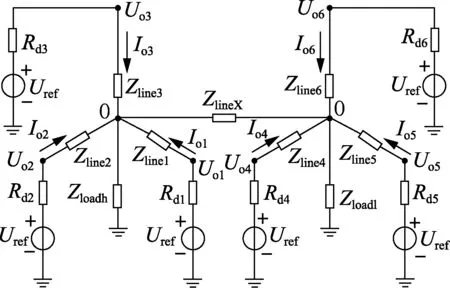
图2 双母线直流微电网等效模型Fig.2 Equivalent model of DC microgrid with two buses
2.2 双母线协调的分层控制
传统阻性下垂控制在电压调节和负荷比例分配之间存在内在矛盾,故需要对控制参数进行二次调节,也就是直流微电网的分层控制。
本文将双母线协调分层控制分为设备级控制和系统级控制2层,如图3所示。图中,ihi、ili和vDChi、vDCli分别为高、低压母线变流器端口电流和电压采样值;ΔUhi、ΔUli分别为高、低压母线对应变流器输出电压状态变量与子网平均值之差。为了避免网内节点之间出现环流以及微源能够自适应负载功率输出,二次调节的主要目标是对每个微源的输出电压、电流进行实时监测,并依据微源自身的负载能力对其出力进行调节;同时高、低压直流母线互为热备用微源,在能力有余的前提下对彼此缺额的功率进行及时的补充。
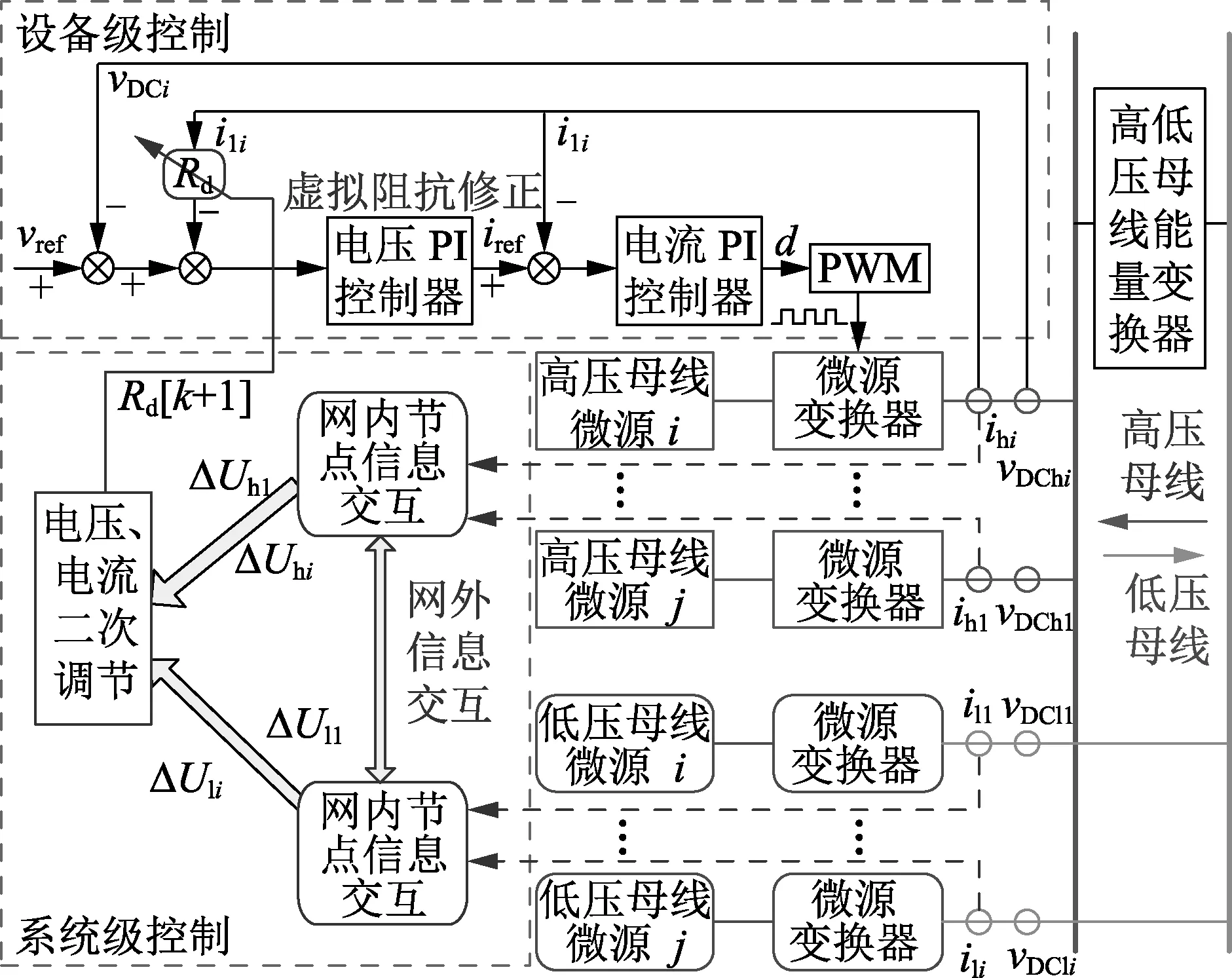
图3 双母线直流微电网分层控制结构Fig.3 Hierarchical control structure of DC microgrid with two buses
在对电压进行调节时,应该将网内微源同步调节至高、低压子网平均电压,如式(3)所示。
(3)
其中,ns为子网对应的节点总数。
在此基础上,再通过各微源本身的带载能力改变阻性下垂系数,按比例分配其输出电流。
当系统节点数增加时,计算二次协调的目标控制参数会变得困难。相较于集中控制,分布式控制可以分担多节点控制系统的运算压力。因此,本文应用离散分组一致性算法对高、低压直流母线所需的电压和电流控制量进行同步计算,通过网内以及网间的信息交互得到满足各微源的阻性下垂系数修正量。
3 离散分组一致性算法
在多智能体协调控制中,为了确保能够分布、协调地完成目标任务,需要所有智能体的状态随时保持一致。然而,受环境、状态甚至时间等变化的影响,系统一致性状态值会随之发生改变。此外,当多个不同的任务交由多个智能体协调完成时,会导致出现多个不同的一致性结果,这就是多智能体分组一致性算法存在的问题。文献[13]基于入度平衡的假设条件,制定了一阶线性多智能体分组一致性协议,但是由于网间通信存在严苛的通信等效影响为0的假设条件,实用性不强。文献[15]弱化了该假设条件,不再要求通信等效影响为0,但需要新的节点邻接权重和假设条件,仍具有较大的局限性。文献[16]在其研究基础上,制定了不受上述假设条件限制的连续系统分组一致性协议,但未考虑离散时的情形。由于各智能体通信中数据传输固有的离散特性以及Java Agent开发框架JADE(Java Agent DEvelopment framework)的异步通信机制,本文考虑在系统实现时应用如下的离散分组一致性协议。
包含n+m个智能体的一阶离散多智能体二分组网络中,n个智能体与m个智能体分别归于2个不同的一致性收敛值,其对应的节点分别隶属于2个相互独立的系统子图G1、G2。其系统方程如下:
(4)
其中,xi[k]和ui[k]分别为第i个智能体在k时刻的状态值和控制输入。应用的离散分组控制协议如下:
(5)

针对多智能体网络系统方程式(4),应用分组控制协议式(5),可以得到:
(6)
(7)
其中,L1、L2分别为子图G1、G2对应的拉普拉斯矩阵;In、Im为对应维度单位矩阵。采用与文献[18]相同的假设条件,具体如下。
假设2:系统子图G1和G2均具有与其相对应的有向生成树。
(8)
而对于式(5)所示的离散分组一致性算法而言,其由相应的控制增益α决定系统能否以及快速达到一致,可根据系统拓扑结构,求解误差系统相关线性矩阵不等式LMI(Linear Matrix Inequality)得到,如式(9)、(10)所示。
(9)
(10)
其中,P为正定矩阵,且有P∈R(n+m-2)×(n+m-2);≻表示矩阵正定。
4 基于分组一致性算法的自适应下垂控制
4.1 控制策略整体架构
本文将直流微电网中的各个单元看作一个独立的Agent,同时各子系统可以利用MA系统本身所具有的自主性和启发性来适应分散而复杂的直流微电网的控制要求,系统控制架构如图4所示。图中,Lh、Ll分别为高、低压母线Agent集合;Nhi、Nli分别为高、低压母线AgentAi中微源集合。
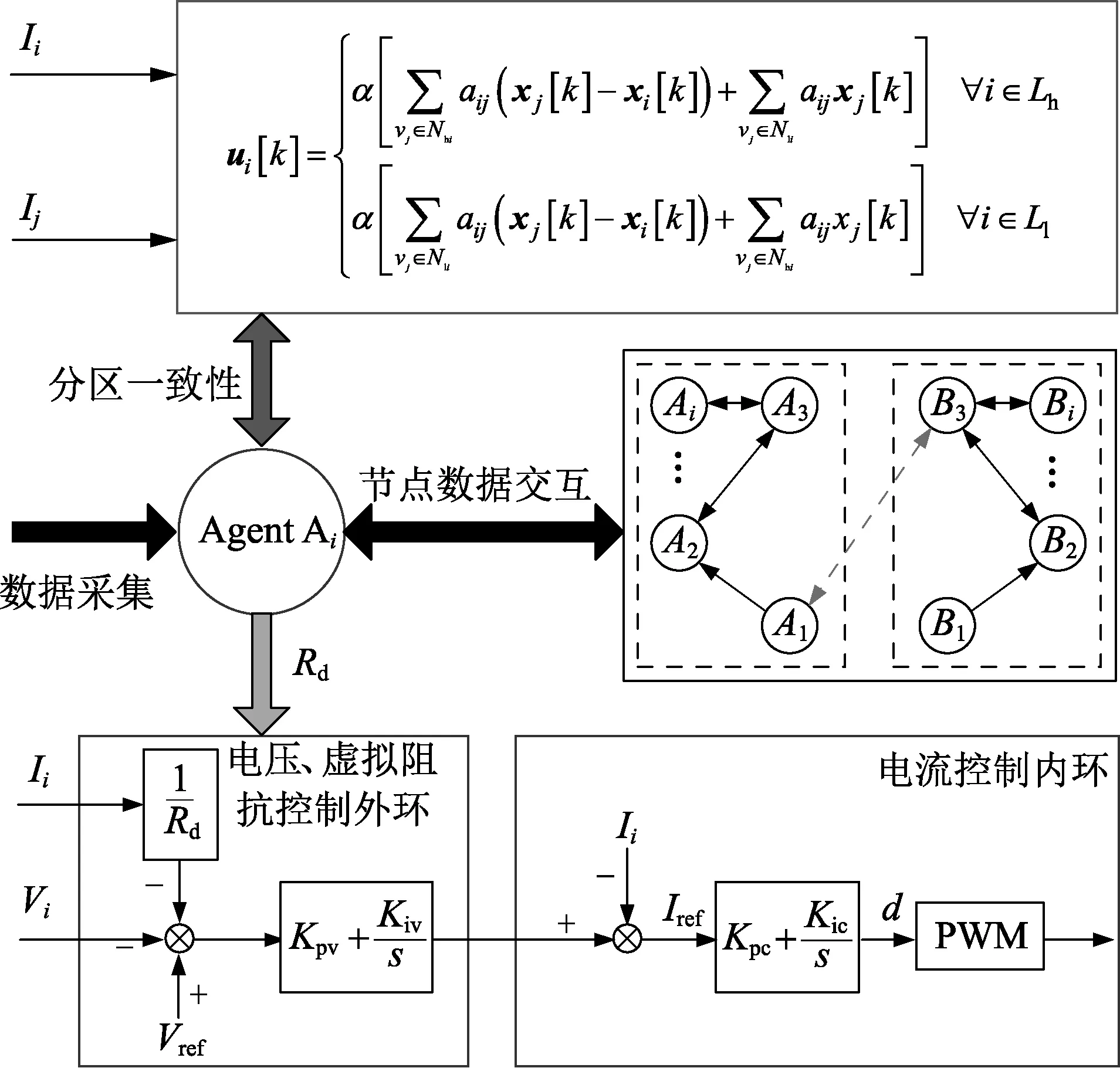
图4 双母线直流微电网分布式控制架构Fig.4 Distributed control architecture of DC microgrid with two buses
控制策略执行过程中,各Agent实时监测其所在功率单元输出电压以及电流,采集控制所需的信息。高、低压母线Agent在各自网内进行信息交互,通过分组一致性算法求得其各自所需要的电压、电流二次控制指令。同时母线间边界节点的信息交互,可以优化整体系统的二次控制性能,并且在高、低压母线功率不平衡时,发起能量交换提议。除此之外,系统仍具有一致性普遍具有的“即插即用”特性,在系统拓扑结构发生变化时,进行自适应调整。设备级控制负责电压、电流的自主调节,由PI控制器完成,如式(11)所示。
(11)
其中,s为Laplacian算子;d为PWM占空比;Iref为电流参考值;Vref为电压参考值;Kic、Kpc为电流PI控制器参数;Kiv、Kpv为电压PI控制器参数;Rd为阻性下垂控制系数。
阻性下垂控制可以带来更好的电流分配和系统阻尼,但固定的阻性下垂系数Rd并不能带来精确的电流分配。为此,系统级控制引入分组一致性算法,通过获取全网平均电流以及各级母线平均电压差来自适应调节阻性下垂系数,以实现高精度负荷分配及全网电压调节。
15-LOX-1在炎症性肠病患者外周血和组织中的表达及其临床意义………………………… 周玉玲,王 欢,屠 强(5·335)
4.2 全网电压恢复一致性迭代
阻性下垂控制会不可避免地带来微源输出电压的下跌,因此,自适应算法应首先考虑对高、低压母线电压进行恢复。这就需要获取各子网内每个Agent的电压数据,并交由分组一致性算法进行分别处理。本地压差由式(12)得到。
ΔUi=Uref-Uoi
(12)
其中,ΔUi为微源本地压差;Uoi为微源输出端电压。
本地压差在Agent内部作为初值被代入分组一致性算法,由式(13)更新高、低压母线的本地压差状态变量。
(13)
经过若干次迭代,各个Agent的本地压差状态变量会分别收敛至高、低压母线的平均本地压差ΔUh[∞]、ΔUl[∞]。
4.3 阻性下垂系数修正
由于微源的额定功率不尽相同,同时在不同工况下其对外提供电流的能力也有较大差异,故在得到各子网平均压差后,需根据各微源的负载能力来相应地调节其出力。由式(14)计算各微源的电流标幺值。
(14)

(15)
并由此更新相应微源的阻性下垂系数Rd:
(16)

4.4 高、低压母线双向变换器控制
双向变换器控制信息的获取依托于高、低压直流母线的边界节点,它们彼此距离相对较近,负责子网间的信息交互,如图4中的节点A1和B3。由于其中存储着最新的全网平均压差信息,可以对高、低压母线的能量负荷状态做出快速判断,便于双向变换器的控制。高、低压直流母线的电压标幺值为:
(17)
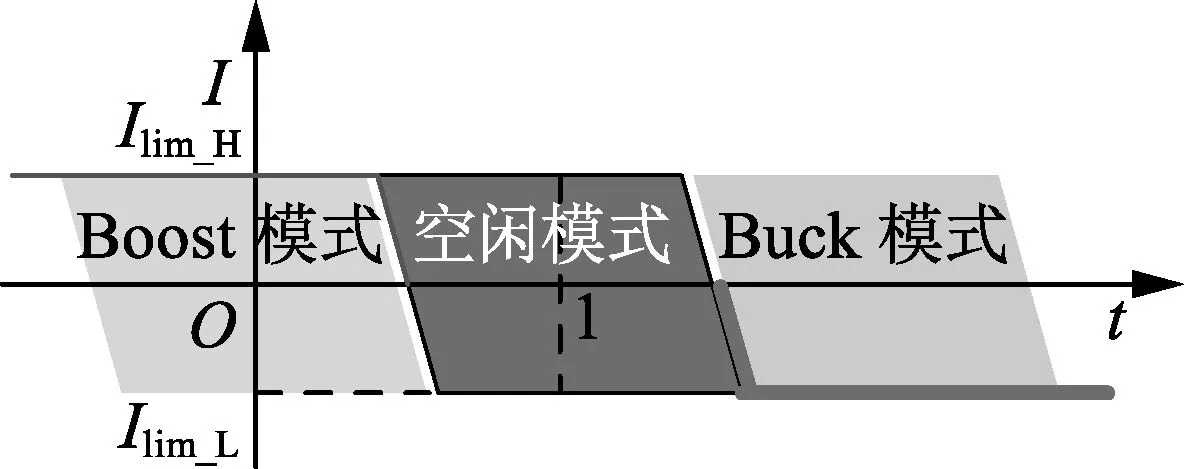
图5 双向变换器下垂特性Fig.5 Droop characteristics of bi-directional converter
5 仿真及分析
本文建立了基于JADE、MacSimJX、Simulink的混合仿真平台,用来验证所提控制策略的有效性。微电网结构如图6所示。JADE可以在局域网内搭建真实的MA环境,其采用标准的代理通信语言ACL(Agent Communication Language),实现代理间合同网[19]交互。5个微源Agent位于局域网内的2台计算机中,通过多个虚拟机终端TCP/IP协议实现互联。在Simulink中搭建包含3个高压微源MGH1—MGH3、2个低压微源MGL1和MGL2以及3个恒功率负载的孤岛直流微电网模型,并通过MacSimJX接口与JADE实现通信。各微源均工作于最大功率点跟踪模式,高、低压母线电压分别设定为380V和48V,系统参数如表1所示。
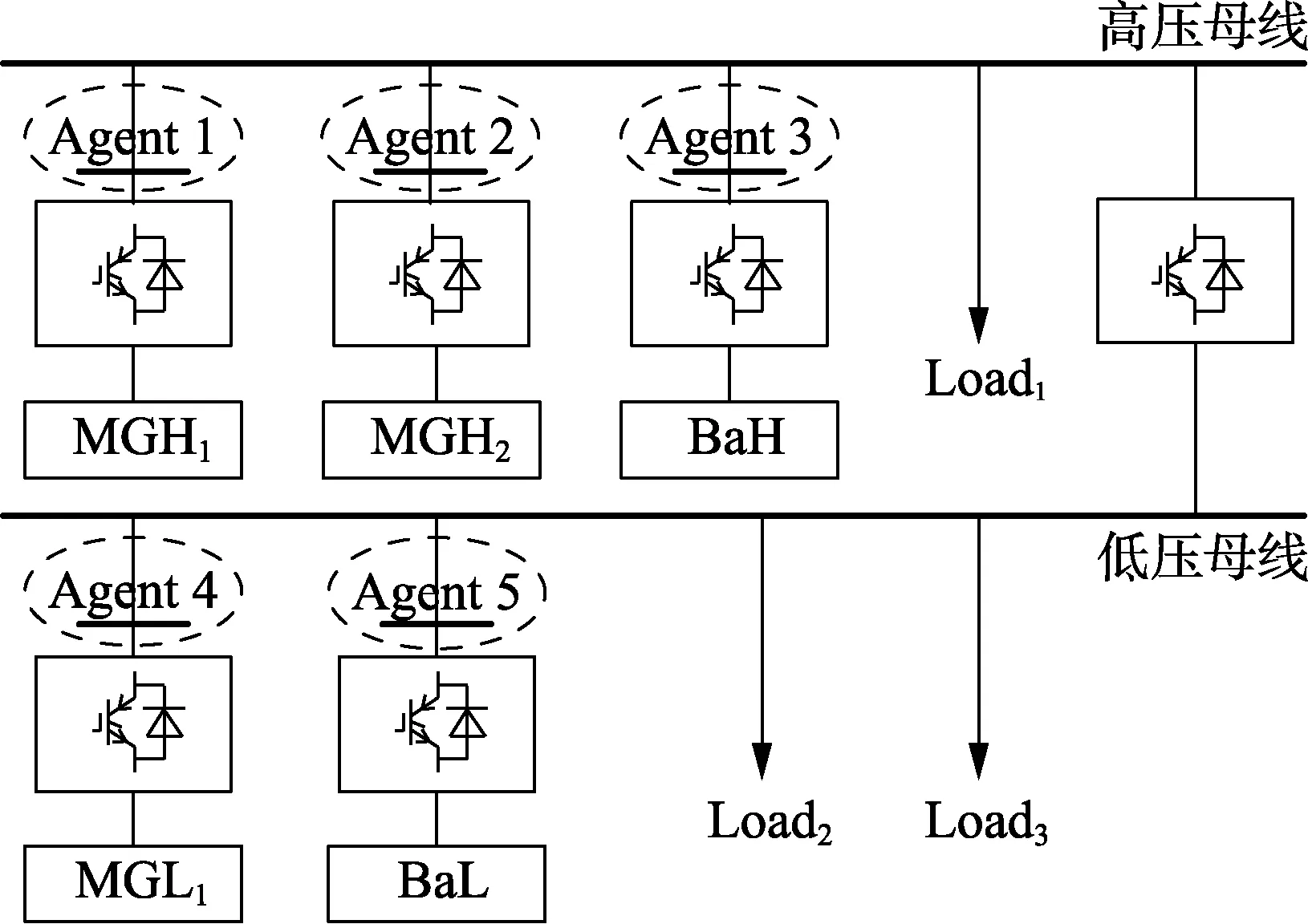
图6 双母线直流微电网结构Fig.6 Structure of DC microgrid with two buses
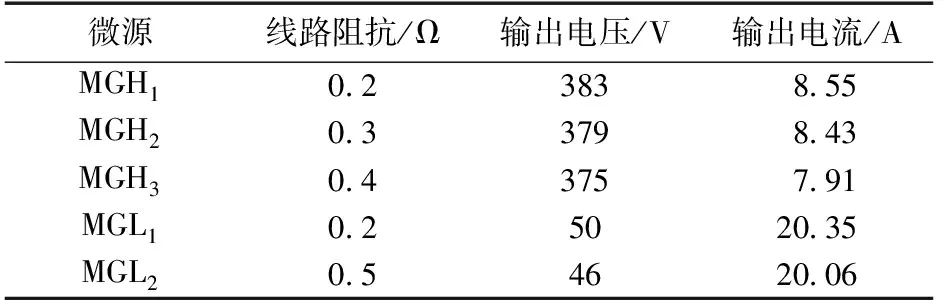
微源线路阻抗/Ω输出电压/V输出电流/AMGH10.23838.55MGH20.33798.43MGH30.43757.91MGL10.25020.35MGL20.54620.06
5.1 Agent分组一致性算法性能分析
图6中各Agent通信拓扑结构如图7所示,假设通信权值均为1,可得到其各子网Laplacian矩阵为:

图7 代理通信拓扑结构Fig.7 Communication topology structure of Agents
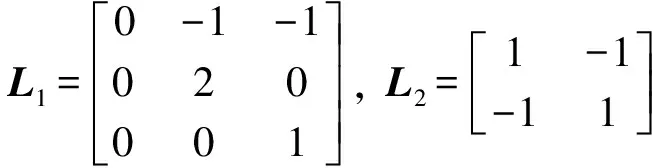
(18)
由式(6)、(7)、(9)、(10),结合锥补线性化CCL(Cone-Complementarity Linearization)算法,可以得出系统控制增益α=0.3917,不同控制增益下一致性算法的收敛特性如图8所示(图中电压为标幺值)。由仿真结果可知,当α偏离最优解时,电压一致性收敛迭代次数明显增加,造成算法性能下降。其中,α偏大会使系统稳定性变差,甚至不能达到一致性收敛。
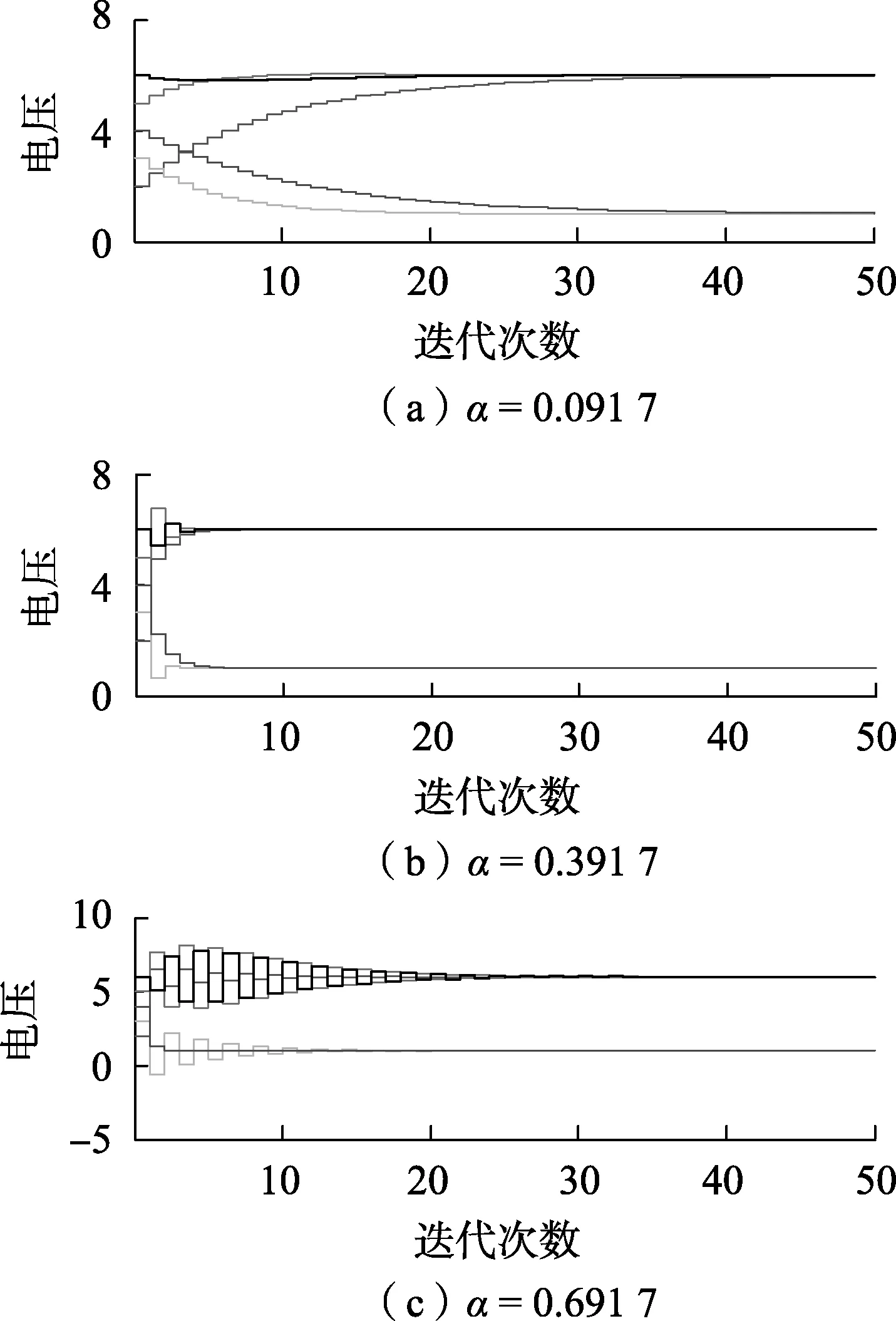
图8 不同控制增益下电压分组一致性算法性能Fig.8 Performance of group consensus algorithm with different control gains
5.2 负载扰动分析
直流微电网原始系统的高压母线带载7kW,低压母线带载1kW,系统高压母线正常运行时冗余功率为2.1kW。负载扰动分析分为高压母线分别突增负载2kW以及3kW这2种情况,以验证不同情况下整体系统的运行情况。
低负载扰动时微源输出电流、电压分别如图9、图10所示(图中电流为标幺值,后同),0.3s时高压母线负载突增2kW,高压母线微源MGH1、MGH2、MGH3通过网内信息交互调节各自的阻性下垂系数按比例增发功率,共同承担负荷所需,母线电压也在0.35s恢复至额定值。同时,由于突增负荷小于高压母线冗余负载能力,高、低压母线的变换器不工作。
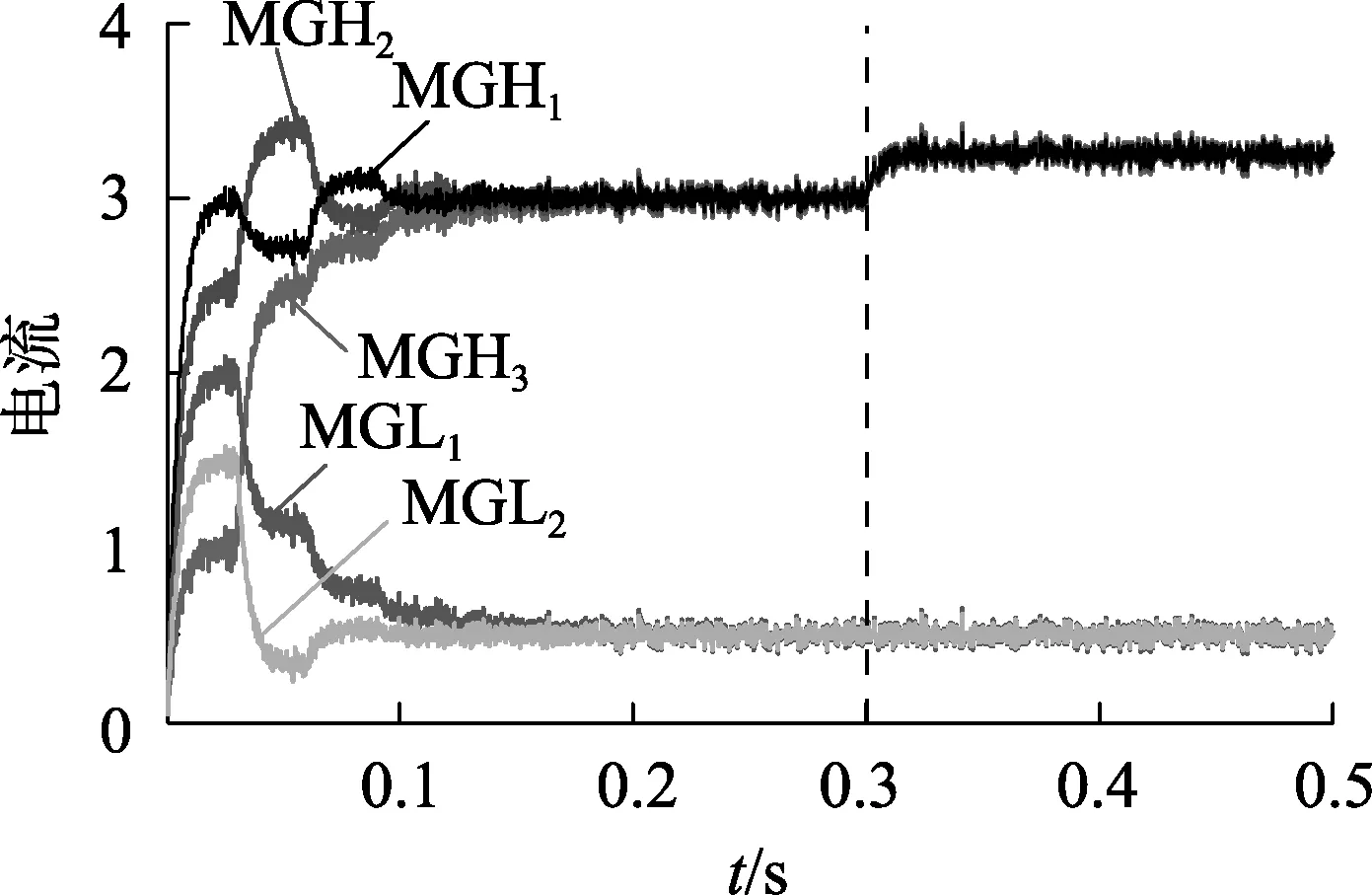
图9 低负载扰动时微源输出电流Fig.9 Output currents of micro sources with low load disturbance

图10 低负载扰动时微源输出电压Fig.10 Output voltages of micro sources with low load disturbance
而当突增负荷大于高压母线冗余负载能力时,微源输出电流、电压分别如图11、图12所示,高、低压母线变换器工作于Boost模式,低压母线能量向高压母线补充,并在0.35s系统达到功率平衡,电压恢复至额定水平。
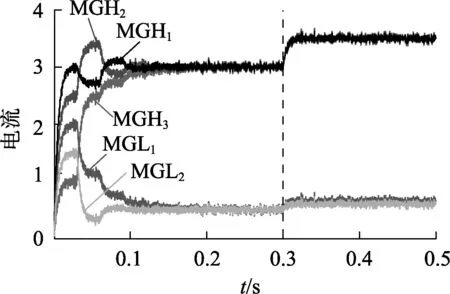
图11 高负载扰动时微源输出电流Fig.11 Output currents of micro sources with high load disturbance

图12 高负载扰动时微源输出电压Fig.12 Output voltages of micro sources with high load disturbance
5.3 通信故障分析
网内通信故障工况在文献[20]中已有阐述,此处考虑网间通信故障的情况。当两子网间通信链路断开时,即式(6)中Ω1、Ω2均为零矩阵时,系统微源电流及电压分别如图13、图14所示。在缺乏边界节点通信的情况下,相同控制增益作用下系统高、低压母线的功率等比例分配需要花费更多的时间;母线电压恢复也受到同样的影响,在0.17s才能恢复至额定水平。
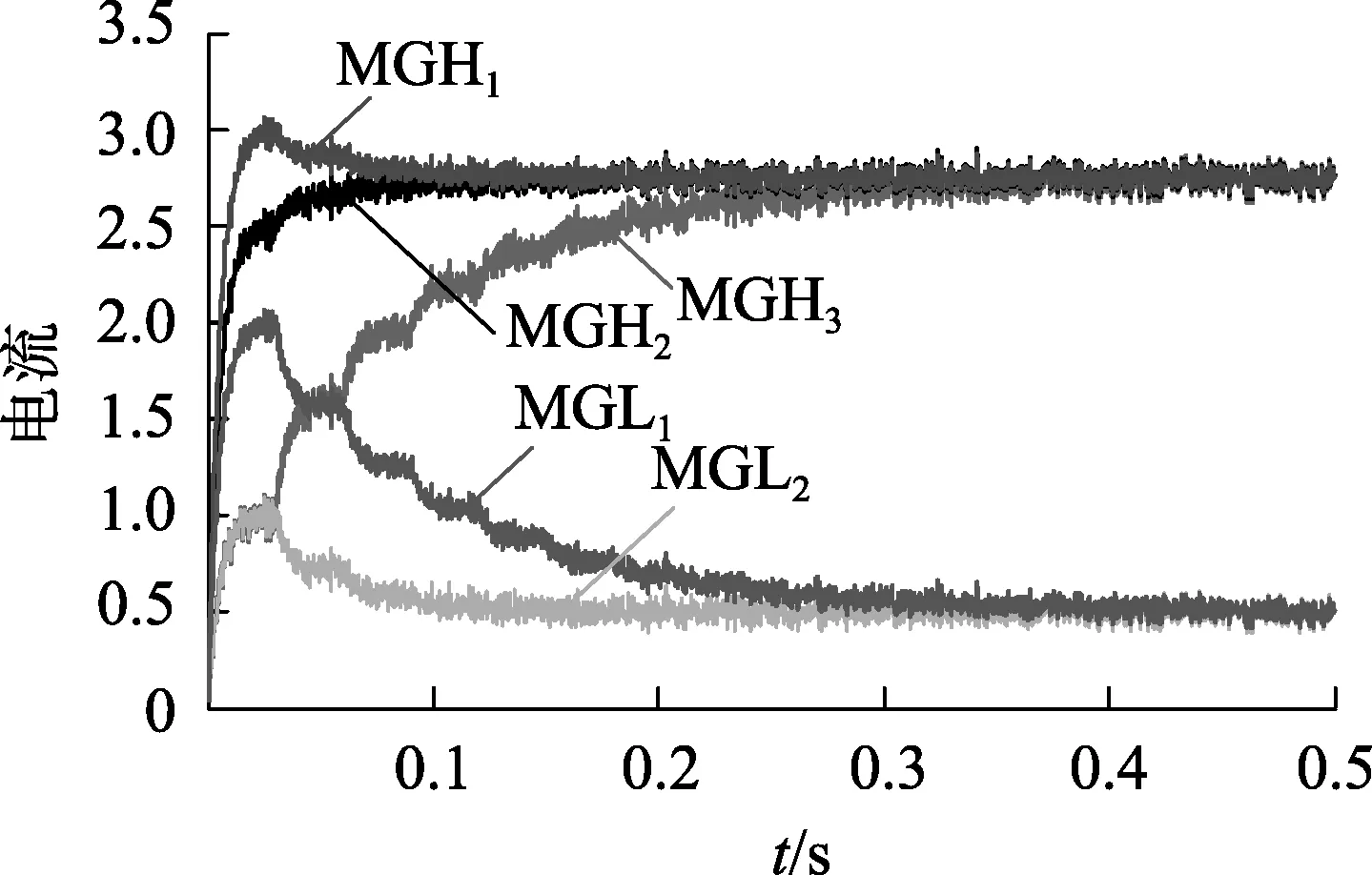
图13 网间通信故障时微源输出电流Fig.13 Output currents of micro sources with network communication failure

图14 网间通信故障时微源输出电压Fig.14 Output voltages of micro sources with network communication failure
5.4 分布式电源故障退出
分布式电源故障退出时微源输出电流如图15所示。0.3s时,高压母线微源MGH2因故障退出运行,高压母线出现功率缺额,其余4个微源经过网内、网间信息交互,迅速增发功率,进行电流及电压矫正控制,在0.32s达到新的稳定运行状态。
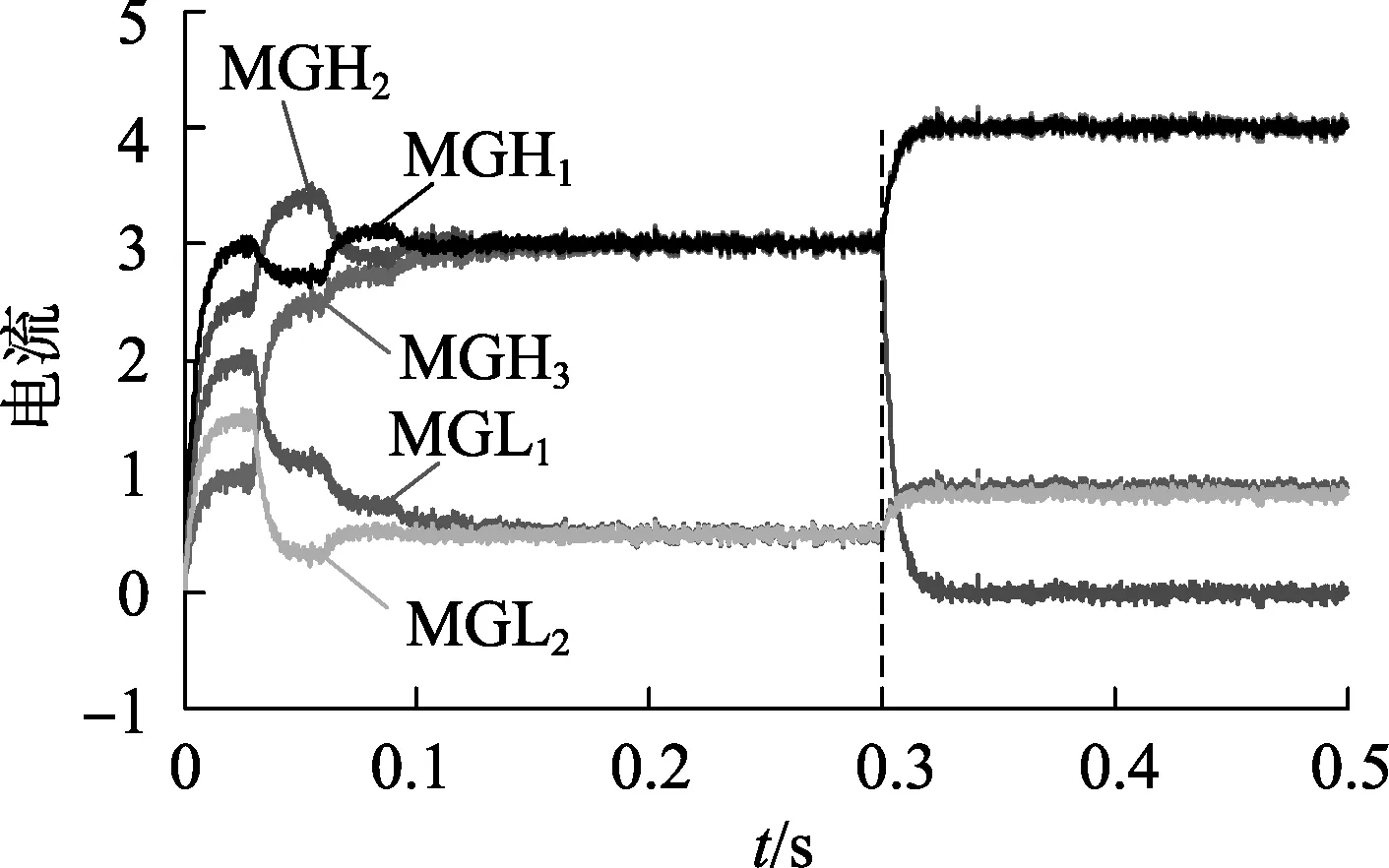
图15 MGH2故障退出时微源输出电流Fig.15 Output currents of micro sources with MGH2 fault
6 结论
本文提出一种基于分组一致性的孤岛直流微电网分布式协同控制策略,所的结论如下。
a. 分组离散一致性算法在不同控制增益作用下的性能差异较大,CCL算法可以快速准确地确定适合系统的增益值。
b. 分组离散一致性算法的应用可以使各子系统更快地达到各自的一致性收敛,对多母线结构的孤岛直流微电网二次电流、电压的矫正控制具有积极的意义。
c. 系统整体以及各子网均具有分布式电源“即插即用”的特性。系统功率突变时,组内分布式电源通过邻居节点通信、组外分布式电源通过网间节点通信,由自身能力来比例承担网内功率所需,提高了整体系统的适应性及可靠性。
参考文献:
[1] 尼科斯·哈兹阿伊里乌. 微电网——架构与控制[M]. 陶顺,陈萌,杨洋,译. 北京:机械工业出版社,2015:1-3.
[2] 王毅,张丽荣,李和明,等. 风电直流微网的电压分层协调控制[J]. 中国电机工程学报,2013,33(4):16-24.
WANG Yi,ZHANG Lirong,LI Heming,et al. Hierarchical coordi-nated control of wind turbine-based DC micro-grid[J]. Proceedings of the CSEE,2013,33(4):16-24.
[3] GU Y,XIANG X,LI W,et al. Mode-adaptive decentralized control for renewable DC microgrid with enhanced reliability and flexibility[J]. IEEE Transactions on Power Electronics,2014,29(9):5072-5080.
[4] 李霞林,王成山,郭力,等. 直流微电网关键技术研究综述[J]. 中国电机工程学报,2016,36(1):2-17.
LI Xialin,WANG Chengshan,GUO Li,et al. Key technologies of DC microgrids:an overview[J]. Proceedings of the CSEE,2016,36(1):2-17.
[5] 吕振宇,吴在军,窦晓波,等. 基于离散一致性的孤立直流微网自适应下垂控制[J]. 中国电机工程学报,2015,35(17):4397-4407.
LÜ Zhenyu,WU Zaijun,DOU Xiaobo,et al. An adaptive droop control for the islanded DC microgrid based on discrete consensus algorithm[J]. Proceedings of the CSEE,2015,35(17):4397-4407.
[6] OLFATISABER R,MURRAY R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Tran-sactions on Automatic Control,2004,49(9):1520-1533.
[7] REN W,BEARD R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Tran-sactions on Automatic Control,2005,50(5):655-661.
[8] MENG L,DRAGICEVIC T,VASQUEZ J C,et al. Modeling and sensitivity analysis of consensus algorithm based distributed hierarchical control for DC microgrids[J]. IEEE Transactions on Smart Grid,2015,7(3):1504-1515.
[9] MENG L,DRAGICEVIC T,VASQUEZ J C,et al. Modeling and sensitivity analysis of consensus algorithm based distributed hierarchical control for DC microgrids[C]∥Applied Power Electronics Conference and Exposition. Charlotte,NC,USA:IEEE,2015:342-349.
[10] 韩民晓,许冬,万磊,等. 基于一致性算法的混合多端直流自律分散控制[J]. 电力系统自动化,2016,40(12):130-136.
HAN Minxiao,XU Dong,WAN Lei,et al. Consensus algorithm based decentralized autonomous control of hybrid multi-terminal direct current system[J].Automation of Electric Power Systems,2016,40(12):130-136.
[11] 颜湘武,王月茹,王星海,等. 基于动态一致性的分布式微源并联控制方法[J]. 电力自动化设备,2017,37(4):17-21.
YAN Xiangwu,WANG Yueru,WANG Xinghai,et al. Parallel control based on dynamic consistency for distributed micro-sources[J]. Electric Power Automation Equipment,2017,37(4):17-21.
[12] 任春光,赵耀民,韩肖清,等. 双直流母线直流微电网的协调控制[J]. 高电压技术,2016,42(7):2166-2173.
REN Chunguang,ZHAO Yaomin,HAN Xiaoqing,et al. Coordination control of DC microgrid with two DC buses[J]. High Voltage Engineering,2016,42(7):2166-2173.
[13] YU Junyan,WANG Long. Group consensus of multi-agent systems with directed information exchange[J]. International Journal of Systems Science,2012,43(2):334-348.
[14] ZHAO H,JU H P. Group consensus of discrete-time multi-agent systems with fixed and stochastic switching topologies[J]. Nonlinear Dynamics,2014,77(4):1297-1307.
[15] 纪良浩,王慧维,李华青. 分布式多智能体网络一致性协调控制理论[M]. 北京:科学出版社,2015:38-39.
[16] TAN C,LIU G P,DUAN G R. Group consensus of networked multi-agent systems with directed topology[C]∥The 18th IFAC World Congress. Milano,Italy:2011,44(1):8878-8883.
[17] DIESTEL R. Graph theory[M]. 4th ed. Beijing:Higher Education Press,2013:16-17.
[18] YU J,WANG L. Group consensus of multi-agent systems with undirected communication graphs[C]∥Asian Control Conference,2009. [S.l.]:IEEE,2009:105-110.
[19] BELLIFEMINE F. Developing multi-agent systems with JADE[M]. Beijing:National Defense Industry Press,2013:16-17.
[20] 顾伟,薛帅,王勇,等. 基于有限时间一致性的直流微电网分布式协同控制[J]. 电力系统自动化,2016,40(24):49-56.
GU Wei,XUE Shuai,WANG Yong,et al. Finite-time consensus based distributed cooperative control for DC microgrids[J]. Automation of Electric Power Systems,2016,40(24):49-56.
