斜拉索动位移实时测定方法研究和系统开发
2018-06-13黄宛昆吴庆雄陈宝春
黄宛昆, 吴庆雄, 陈宝春
(1. 福州大学土木工程学院, 福建 福州 350116; 2. 工程结构福建省高校重点实验室, 福建 福州 350116;3. 福建省土木工程多灾害防治重点实验室, 福建 福州 350116)
0 引言
作为斜拉桥主要受力构件, 斜拉索在斜拉桥的施工过程和成桥运营阶段起着关键性作用[1]. 由于斜拉索柔度大、 质量轻、 阻尼小, 在风、 雨、 车等作用下容易产生大振幅的振动位移, 同时随着斜拉索长度的增加, 斜拉索自振频率降低, 使得斜拉索振动问题以及由此引发一系列相关问题日益突出[2-3]. 因此, 斜拉索的动位移需要进行测量和研究. 目前工程上通常采用加速度测量方法来测量斜拉索振动加速度[4], 并通过数值积分方法获得斜拉索动位移[5]. 但是, 由于积分初始条件不确定, 较难得到准确的动位移测量结果. 直接测量动位移可以采用激光位移计[6]或全球定位系统(GPS)[7]的测量方法. 激光位移计只能进行短距离测量, 并且测量得到的是相对位移, 在不断振动的斜拉桥桥面上无法保证激光感测头的固定. GPS测量斜拉索动位移精度不够, 无法得到准确的斜拉索动位移测量结果.
针对斜拉索动位移测量的需要, 有学者采用非接触式测量技术[8]进行测量. Jurjo等[9]采用线性方程组修正数码相片测量结果, 并通过模型实验验证结果的准确性. Giulio等[10]利用两台相机衡量振动摄像测量过程中的不确定因素及其影响. Fujita等[11]对木质房屋的三向振动台实验过程进行测量. 刘世杰等[12]利用数码相机测量并计算斜拉索实验模型在加载前后的挠度变化量. 周晓青[13]利用摄像机拍摄斜拉索的振动, 并通过电脑后期处理计算斜拉索动位移 .
斜拉索的特性要求动位移测定系统能够实现非接触的多测点同时测量, 即时输出满足精度要求的动位移测量结果. 而现有的动位移测定系统, 存在着价格太高、 测量精度不足、 无法实现多测点同时测量等缺点. 文献[13]提出的测试系统可以实现精确测量动位移的目的, 但是该程序只能测量一个目标点在水平和竖直两个方向的动位移, 无法实现多测量目标同时进行测量. 同时, 动位移测量结果是通过电脑对拍摄视频进行后期处理以后得到的, 不能满足实时输出结果的要求. 因此, 现有的测量技术和测量系统并不能很好地满足工程上精确测量动位移的需要.
鉴于现有的动位移测定方法存在的不足, 本文旨在建立斜拉索的动位移实时测定方法, 开发单相机多测点斜拉索动位移实时测定系统, 并通过室内模型试验和实桥测试验证测定方法的有效性和测试结果的准确性.
1 动位移测定方法和测定系统
1.1 LabVIEW视觉与运动模块
LabVIEW的视觉与运动模块是以LabVIEW程序开发平台为基础, 利用相机或摄像头进行程序开发的产品模块, 其中较常用的有NI Vision Acquisition和NI Vision Development Module等. Vision Acquisition的主要作用是提供一组驱动程式及程序, 用于从系统支持的USB接口相机、 Gige千兆网卡接口相机或IEEE 1394接口相机读取、 显示及储存影像信息. Vision Development Module是主要用于图像处理的应用模块组, 内含Vision Assistant等模块. Vision Assistant提供了多种处理函数, 涵盖计算机进行图像处理的绝大多数功能应用. 利用这些函数, 可以方便地生成脚本程序, 并将之运用于动位移测量.
1.2 动位移测定方法的基本原理
1.2.1 相片处理和边界侦测
利用相机测量振动位移, 主要是利用一个固定在结构物上的标志点, 通过相机拍摄标志点的位置, 并根据不同时刻标志点的位置变化, 来判断结构物该点的振动位移. 这一过程主要是通过标志点的边界侦测实现的. LabVIEW中提供多种边界侦测函数, 可以方便自如地运用于各种场合. 本文选用圆形边界(circular edge)侦测. 图1是圆形边界侦测原理和实测边界侦测的相片.

图1 边界侦测原理Fig.1 Principle of edge detection
由于利用相机测量得到的结果是以像素值为单位的, 在不同的实验测量过程中, 由于相机到被测物体距离和相机焦距均不相同. 因此, 在实际运用中需要将像素大小转化为实际尺寸大小. 本文采用的标定方法是在相片上规定一条直线段, 并设定该线段的实际长度. 利用自带函数分析线段的起终点坐标, 求出该线段的像素长度, 进而计算测量单位转化的比例系数. 若选取一个像素长度为165 px的直线段进行标定, 采用该方法确定的比例系数, 其误差值为1 px, 相对误差为0.6%.
1.2.2 数据的处理和即时输出
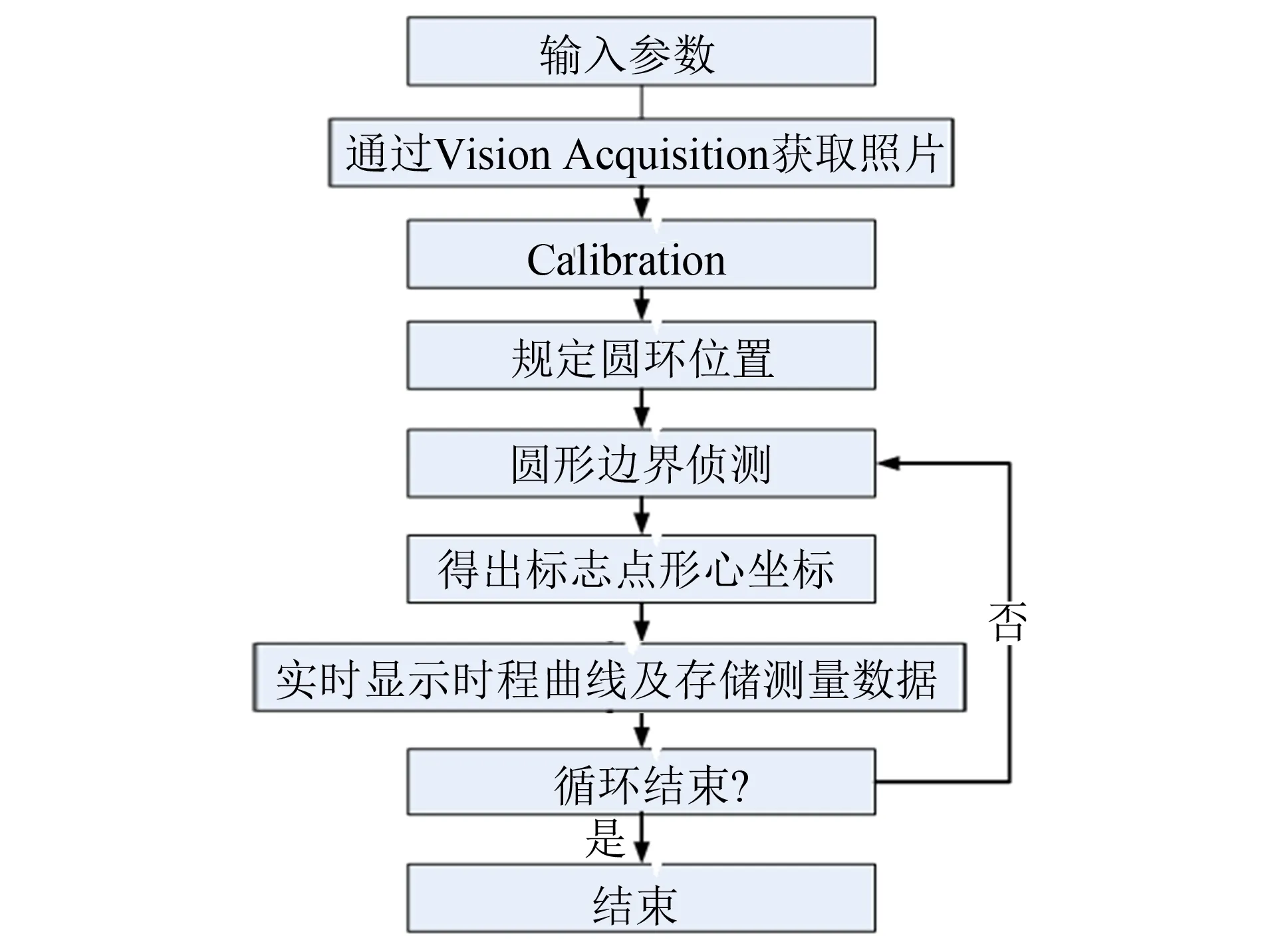
图2 相机测量动位移程序流程图Fig.2 Diagram of program for displacement measurement
动位移测量程序的主体是一个While循环, 循环周期由Vision Acquisition的帧速率指定. 每一个循环过程中, 通过Vision Acquisition提取一张照片, 并利用曝光的时间间隔进行相片分析和数据处理, 得到目标点的动位移测量结果, 通过示波和存盘即时显示动位移测量结果并储存. 程序流程见图2.
1.2.3 多测点的动位移测量和误差分析
多测点的动位移测量是指利用同一张照片, 对不少于2个测点的动位移进行同步测量. 对于多测点的动位移测量, 其相片处理过程与单测点相近, 但是需要在进行边界分析之前先进行区域(region of interest, ROI)划分. 对于同一个拍摄相片内包含i个不同测点, 系统按照预设的脚本将相片划分成i个包含不同测点的区域, 在该区域内侦测测点, 得到对应的形心坐标(x1t,y1t), (x2t,y2t), …, (xit,yit). 生成结果矩阵并储存:
I=[x1,y1;x2,y2; …;xi,yi]
式中:xi={xi0,xi1, …,xit};yi={yi0,yi1, …,yit};i表示测点编号;t表示时间轴坐标.

图3 多测点的位移测量原理和误差分析(单位: cm) Fig.3 Principle and error analysis of multi-point displacement measurement (unit: cm)

1.3 动位移测定的系统开发

图4 动位移测定试验设备Fig.4 Devices for displacement measurement
采用加拿大产Prosilica EC 650相机, 配合日本产Navitar镜头, 通过IEEE 1394接口接入电脑, 组成相机系统如图4所示, 其产品参数如表1所示. 全套硬件设备价格大约16 000元人民币, 加上用于程序开发的LabVIEW平台及附加组件, 总价不超过50 000元人民币, 本文所开发的测定系统较现有的测定系统价格更低.

表1 动位移测定试验设备和产品参数
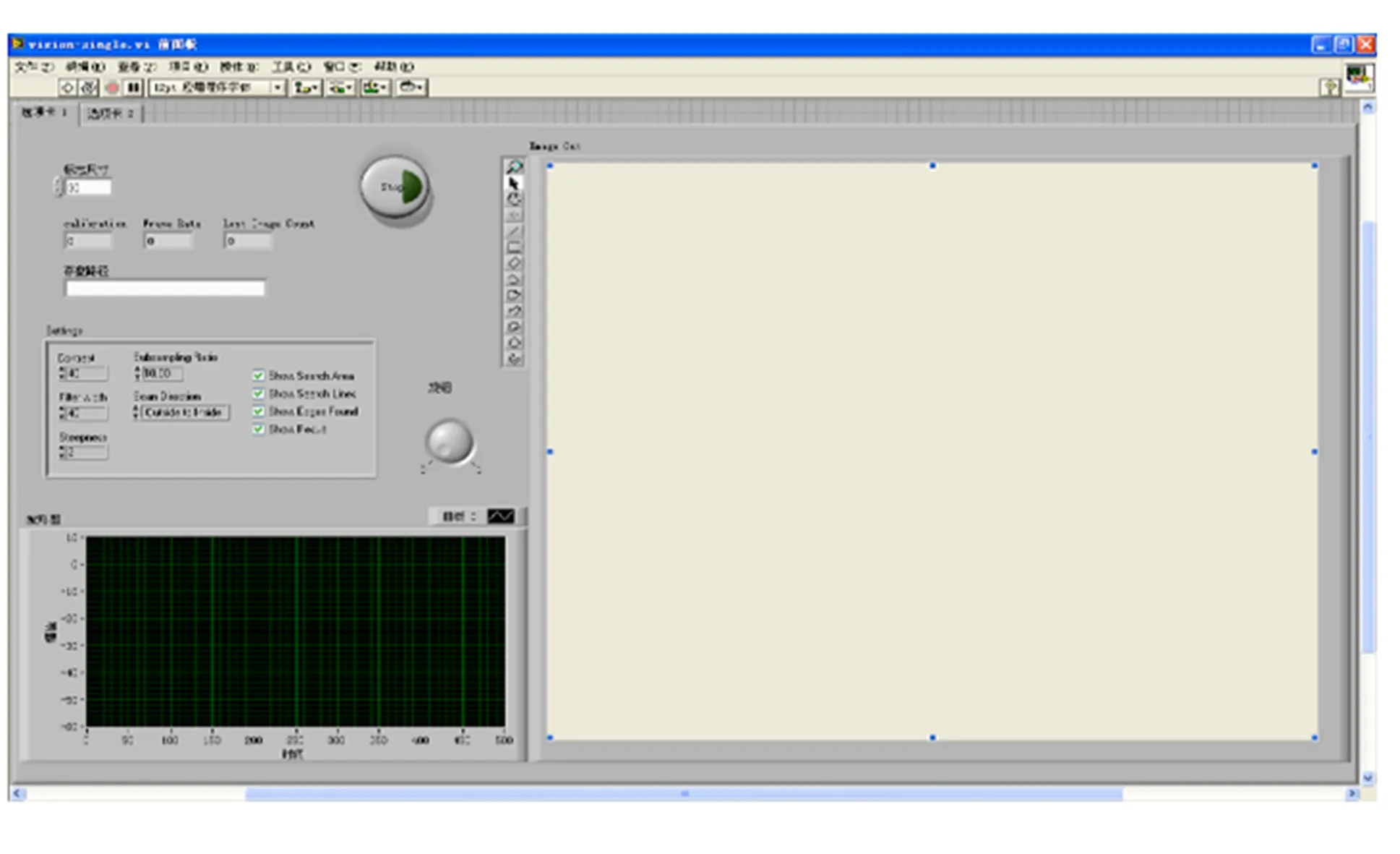
图5 动位移测量程序的前面板Fig.5 Front panel of program
利用图4和表1所示的硬件设备, 开发用于测量斜拉索振动位移的测量程序(如图5所示), 并设定采样频率为50 Hz进行采样. 使用的主要子程序有: 选择直线(IMAQ Select Line. Vi)、 寻找圆形边界(IMAQ Find Circular Edge. Vi)和写入数据(Write To Spreadsheet File. Vi). 子程序选择直线(IMAQ Select Line. vi)的主要作用是计算单位转换的比例系数. 该子程序运行后会跳出一个对话框用于选择直线, 在图上指定该直线段后, 程序会自动识别出该直线段的起终点坐标, 并计算出其像素长度. 通过在前面板上规定该直线段的尺寸, 可计算单位转换的比例系数. 子程序寻找圆形边界(IMAQ Find Circular Edge. vi)用于侦测相片上标志点的圆形边界, 并输出形心坐标. 子程序写入数据(Write To Spreadsheet File. Vi)将测量得到的圆心坐标, 进行实时记录, 将测量结果作为一个二维数组进行存储.
2 室内试验验证与讨论
为验证相机测量动位移的测量精度, 采用激光位移计与其对比. KEYENCE LK- GD500型激光位移计由激光感测头、 控制器及电源组成, 最大误差率±0.3%, 最高采样频率可达7.8 kHz, 是一种高精度且可连续观测的位移测量仪器. 室内试验使用的是一个单自由度的摆锤模型, 在初始位移的影响下, 摆锤模型将发生正弦的自由衰减振动.
2.1 不同角度的单目标测量
若相机轴线方向与标志点振动平面垂直或存在45°的夹角, 相机测量角度和振动测量方向如图6. 相机和激光位移计测得的时程曲线如图7. 可以看出, 在相机轴线与目标振动平面垂直的情况下, 相机测量结果与激光位移计测量结果完全一致, 证明本文动位移测定方法的有效性和测定结果的可靠性.

图6 相机测量角度示意图Fig.6 Diagram of measuring angle
若相机轴线与标志点振动平面存在45°的夹角, 测量结果如图8. 可以发现, 若是相机的测量轴线与目标点的振动平面不垂直, 则会对测量结果产生偏差. 因此, 在实际测量中, 应尽量使相机的测量轴线与被测目标的振动平面垂直.

图7 α=90°时位移时程曲线Fig.7 Displacement time-history curve while α=90°
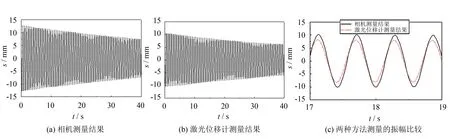
图8 α=45°时位移时程曲线 Fig.8 Displacement time-history curve while α=45°
2.2 多目标同时测量
对两个标志点A和B进行多目标动位移测量. 其中,A点固定在摆锤上, 在初始位移的作用下发生正弦的自由衰减振动,B点固定不动. 利用多目标测量程序同时测量两点在水平和竖直两个方向的动位移.
取水平向为X方向, 竖向为Y方向, 测得结果示于图9. 可以看出,A点的X方向动位移振幅较大(最大5 mm),Y方向动位移振幅(<1 mm)较小;B点的X方向动位移和Y方向动位移测量结果非常小(<0.5 mm), 几乎呈一条直线. 这与实际模型(A点主要在X方向发生自由衰减振动,B点固定不动)是一致的. 证明本文采用的动位移测定方法可以用于多测点的动位移实时测定, 测定结果准确, 满足斜拉索动位移测试的要求.

图9 多目标的动位移测定结果Fig.9 Measurement result of multiple targets
3 实桥测量与对比
选取泉州晋江大桥作为背景工程, 该桥位于福建省泉州市, 主桥为200 m+165 m=365 m的两跨预应力混凝土斜拉桥, 主桥设26对共104根斜拉索, 采用热挤压的平行钢丝索[14].
使用动位移实时测定系统对晋江大桥的拉索动位移进行测量. 利用动位移测量程序, 一次对两根斜拉索进行测量, 得到斜拉索位移时程曲线. 由于实桥测试时, 桥面固定不动点较难获得, 难以采用激光位移计对拉索振动的位移进行直接测量, 因此采用传感器对拉索振动加速度进行测量, 并与相机测量结果进行对比验证. 泉州晋江大桥主跨下游26号斜拉索的面内振动位移时程曲线、 频谱曲线和对位移进行二次差分计算的加速度结果示如图10. 同时, 利用加速度传感器记录该拉索的加速度时程曲线, 并分析其频率响应曲线, 结果如图11.

图10 动位移测量结果(主跨下游26号斜拉索)Fig.10 Displacement measuring result (Cable MD26#)
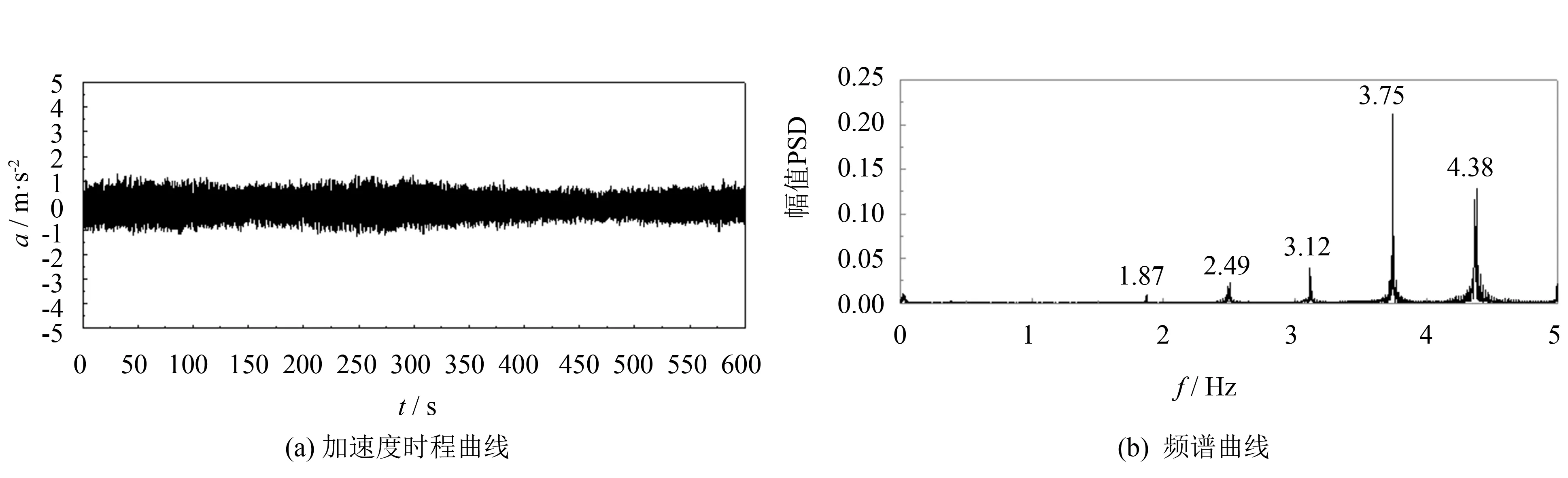
图11 加速度测量结果(主跨下游26号斜拉索)Fig.11 Acceleration measuring result (Cable MD26#)
将斜拉索动位移测量结果和加速度测量结果进行对比, 两种方法得到的拉索卓越频率见表2. 可以看出, 利用动位移测定系统测得的26号索振动位移幅值与加速度传感器测量结果基本一致, 频率与加速度传感器测得的频率的误差不超过0.5%. 根据《公路斜拉桥设计细则》规定, 斜拉索索力计算误差不宜超过5%, 即频率误差不宜超过2.5%, 本文测量方法和测试系统所得的结果远小于这一要求, 因此该测定方法应用于实桥测试的可行性和有效性得到验证.
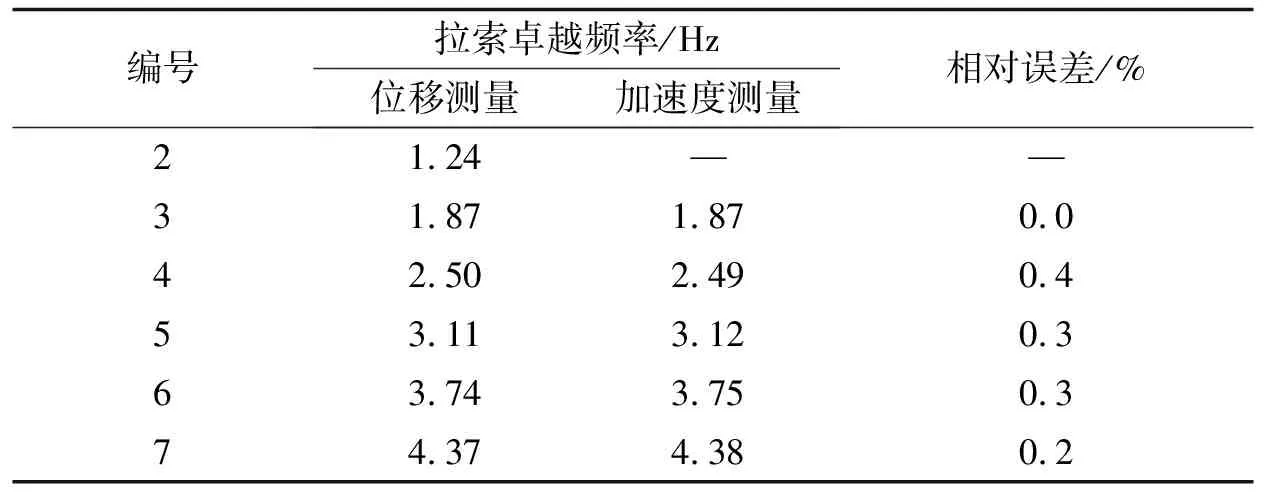
表2 斜拉索测得的卓越频率
4 结语
1) 基于单相机多测点动位移测定技术, 建立斜拉索动位移实时测定方法, 满足斜拉索动位移测试的要求.
2) 基于LabVIEW程序开发平台, 编制多测点动位移测定程序, 利用高速相机和镜头开发动位移实时测定系统, 所开发的测定系统较现有的测定系统价格更低.
3) 通过与激光位移计进行室内试验比较, 验证该测定方法的有效性、 多目标测定的实用性和测定结果的准确性, 并讨论相机拍摄角度对于测量精度的影响.
4) 利用单相机多测点动位移测定系统对泉州晋江大桥的拉索动位移进行实桥测量, 通过对测试结果的分析验证了该测定方法应用于实桥测试的可行性和有效性.
参考文献:
[1] 林元培. 斜拉桥[M]. 北京: 人民交通出版社, 2004.
[2] WU Q X, TAKAHASHI K, NAKAMURA S. Non-linear vibrations of cables considering loosening[J]. Journal of Sound and Vibration, 2003, 261(3): 385-402.
[3] 李文勃, 林志兴. 斜拉桥拉索风雨激振研究的实验设计[J]. 长安大学学报(自然科学版), 2003, 23(2): 57-60.
[4] 李枝军, 李爱群, 缪长青, 等. 运营状态下南京长江二桥拉索索力测试与分析[J]. 东南大学学报(自然科学版), 2007, 37(6): 1057-1060.
[5] 张志, 孟少平, 周臻, 等. 振动台试验加速度积分方法[J]. 振动、 测试与诊断, 2013, 33(4): 627-633.
[6] ABE M, FUJINO Y, KAITO K. Damage detection of civil concrete structures by laser doppler vibrometry[C]// Proceedings of the 19th International Modal Analysis Conference. Kissimmee: [s.n.], 2001: 704-709.
[7] 贺志勇. 基于GPS的高耸结构动态特性监测[J]. 振动与冲击, 2009, 28(4): 14-17.
[8] AVITABILE P, NIEZRECKI C, HELFRICK M,etal. Noncontact measurement, techniques for model correlation[J]. Sound and Vibration, 2010, 44(1): 8-13.
[9] JUIJO D, MAGLUTA C, ROITMA N,etal. Experimental methodology for the dynamic analysis of slender structures based on digital image processing techniques[J]. Mechanical Systems and Signal Processing, 2010, 24(5): 1369-1382.
[10] GIULIO D, LAURA R, EMANUELE Z. Uncertainty analysis of high frequency image-based vibration measurements[J]. Measurement, 2013, 46(8): 2630-2637.
[11] SATOSHI F, OSAMU F, YASUSHI N,etal. Research and development of three-dimensional measurement method for dynamic displacement in shake table tests applying image processing technique[J]. Journal of Pressure Vessel Technology: Transactions of the ASME, 2004, 126(1): 115-121.
[12] 刘世杰, 叶勤, 童小华, 等. 用数码相机测量斜拉桥拉索模型的变形[J]. 吉林大学学报(工学版), 2007, 37(4): 920-924.
[13] ZHOU X Q, XIA Y, WEI Z L,etal. A videogrammetric technique for measuring the vibration displacement of stay cables[J]. Geo-spatial Information Science, 2012, 15(2): 135-141.
[14] 吴庆雄, 王文平, 陈宝春. 泉州晋江大桥动力性能分析[J]. 公路交通科技, 2010, 27(4): 44-50.
