基于ARM的高性能交流伺服电机系统设计
2018-06-04张燕红张建生吴政涛
张燕红,王 磊,吴 璇,张建生,吴政涛
(1.常州工学院,常州 213032;2. 中兵通信科技股份有限公司,新乡 453000;3.南通大学,南通 226019;4.常州大学,常州 213164)
基于ARM的高性能交流伺服电机系统设计
张燕红1,王 磊2,吴 璇3,张建生1,吴政涛4
(1.常州工学院,常州 213032;2. 中兵通信科技股份有限公司,新乡 453000;3.南通大学,南通 226019;4.常州大学,常州 213164)
摘 要:分析了永磁同步电动机的工作原理,利用S3C2440芯片的软硬件裁剪式优点,设计了基于S3C2440控制的高性能交流伺服电机系统。系统的硬件主要包括控制模块、驱动模块及电流检测模块,简化了电路的复杂程度。系统采用电流环和速度环的双闭环PI矢量控制策略,对伺服电机系统进行实验研究,实验结果表明设计的交流伺服电机系统具有较高的控制精度。
关键词:永磁同步电动机;S3C2440;双闭环PI控制策略;高性能伺服系统
0 引 言
伺服电机系统通过控制电机来带动机械负载转动,并实现对电机的转速、转矩和位置的精准控制[1]。随着电力电子器件和制造业的迅速发展,电机也在更新换代,其中,永磁同步电动机(以下简称PMSM)已被成功应用于高性能伺服系统中。PMSM是一种交流电机,且结构简单,体积小,不像直流电机那样换向,无需励磁电路,具有高转矩比、高效率等优点[2]。在交流伺服系统中,PMSM作为执行元件,接收系统控制器输出的电信号,并将其转换成电机轴上的角速度和角位移[3]。而控制器接收到传感器检测电机的反馈信号,经过信号处理,输出相应的控制信号来控制电机,从而保证了整个控制系统的稳定运行[4]。常用的交流伺服系统控制器芯片有单片机、PLC及DSP[5-7],这些芯片虽然实现了一定的控制要求,但内部集成模块太少,需要扩展外围模块,导致电路结构复杂,成本较高。由于ARM芯片的外围模块丰富,芯片为裁剪式,控制性能好,性价比较高,所以适合应用于高性能交流伺服系统的控制[8]。本文设计了一种基于S3C2440控制的高性能交流伺服电机系统,以提高伺服系统的控制精度。
1 伺服系统的控制原理
1.1 d-q坐标系下的PMSM数学模型
PMSM系统具有时变性、非线性和强耦合性,且电磁关系非常复杂,是一个复杂的多输入多输出的非线性物理模型,具有更低的传导损耗。因此,为了使系统的变量之间得到部分解耦,系统的数学模型大大简化,便于系统的分析和控制,在研究PMSM的物理模型时,需作如下的设定:
①忽略磁路饱和、铁心损耗、磁滞损耗和涡流;
②三相绕组均匀对称,在空间上互相差120°;
③忽略空间谐波,感应电动势和磁动势按正弦波分布。
同步旋转d-q坐标系下的电机数学模型,通常由动态电压方程、磁链方程、转矩方程和运动方程组成。其中,电压方程:
(1)
式中:id,iq分别为d,q轴的电流分量;ψd,ψq分别为d,q轴的磁链分量;ωr为转子的角速度;Rs为定子电阻。
磁链方程:
(2)
式中:Ld,Lq分别为d,q轴的电感分量;ψr为转子磁链。
电磁转矩方程:
(3)
式中:p为电机极对数。
运动方程:
(4)
式中:J为转动惯量;B为转子粘滞摩擦系数;TL为负载转矩。
1.2 矢量控制策略的控制原理
PMSM伺服系统是一个强耦合、非线性的复杂系统,需选择合适的控制策略来提高系统的控制效果。矢量控制策略(以下简称VC)因具有响应速度快、转矩脉动低、控制精度高等优点而被广泛应用于高性能交流伺服系统中[9]。由式(3)、式(4)可知,有效控制电流id和iq,即可达到控制电机稳定运行的效果。矢量控制的原理就是通过分别控制相互正交和独立的电流id和iq来实现系统的解耦控制。
PMSM矢量控制系统的结构如图1所示,系统采用电流内环和速度外环的双闭环矢量控制策略。

图1 矢量控制结构图
其中,电流内环主要负责电机的转矩能否快速响应,本文采用经典的PI控制器,P环节主要用来提高系统的响应速度;I环节则可以减小系统的稳态误差。两路PI 控制器分别以id和iq的偏差值为给定值,以udref和uqref为输出值。速度外环对整个系统的调速起决定性作用,需要有较好的抗干扰性能,也采用PI控制器。在速度环中,位置检测装置通过光电编码器检测PMSM转过的角度θ,然后计算出PMSM的角速度ωr,并以ωr的偏差值作为速度PI的输入值,以iqref为输出值。空间矢量脉宽调制(SVPWM)主要是将逆变器和电机看作一体,按照跟踪圆形旋转磁场来控制PWM电压。SVPWM逆变器按照一定的时间切换不同的开关模式,产生三相正弦电压,从而控制PMSM的转动[10]。
系统采用id=0的矢量控制方式,此时电磁转矩方程:
(5)
式中:Ke可看作电磁转矩系数,为定值。
根据式(1)、式(2)、式(4)、式(5),可得出PMSM的解耦状态方程:
(6)
结合系统所采用的双闭环矢量控制策略,可设计出PMSM的双闭环控制框图如图2所示。

图2 双闭环控制框图

图3 等效速度闭环控制框图

(7)
(8)
其中,式(7)为速度传递函数,式(8)为负载转矩传递函数。
2 系统硬件设计
本文设计的高性能伺服系统的硬件结构图如图4所示。

图4 硬件结构图
主控制器采用S3C2440芯片,驱动器采用DH50M-A,PMSM则采用110DH-A06020H。系统的工作原理:主控制器将PWM信号传送到驱动器,通过控制IGBT的导通时间来驱动PMSM的转动;电流检测模块检测PMSM的三相电流,经过处理后送至主控制器的ADC,S3C2440通过获得的电流信号和转速信号来进行双闭环PI控制,并输出新的PWM信号。
2.1 控制模块
主控芯片S3C2440是一款基于ARM9内核的16/32位RISC微处理器,并附有丰富的通用外设模块。该芯片可采用裁剪式,去除空置的外设,只留下需用的外设,以减少系统的成本和体积。其中AD转换接口,可将电流检测模块发送的模拟电压信号转换为数字信号,再送至S3C2440进行控制。具有PWM功能的定时器在S3C2440的控制下,向逆变器输出PWM波形,从而形成三相正弦电压供给PMSM。由于PMSM需要6路脉冲控制,可用2个通用定时器来完成。此外,还需要1个定时器来接收光电编码器发送的脉冲信号,根据公式进一步计算出电机的转速。还有一些I/O口可用于中断控制;USART口可用来与PC机连接通信,JTAG口则用来下载程序和在线调试;还有一些按键,用于显示屏上的调速和调频。
2.2 驱动模块
DH50M-A接收主控制器S3C2440发出的控制信号,通过SVPWM技术,形成三相正弦波电压来驱动PMSM转动,达到伺服系统的精准控制。110DH-A06020H电机需与DH50M-A相匹配。DH50M-A内部有设计好的驱动放大电路,可将S3C2440发出的弱电信号放大为电机所需要的强电信号。DH50M-A在电源供电时需接1个380~220 V的三相隔离变压器,以保证DH50M-A不被损坏。本文所选用的电机内部带有光电编码器,可测出电机的转动信号,并反馈至DH50M-A中,通过主控制器的控制和计算,可得出电机的角速度和转速,该驱动器中已设计好过流、过压和过热等保护电路。
2.3 其他模块
系统还设计了1个电流检测电路,使用2个霍尔电流传感器采集PMSM的A相和B相电流信号,并通过计算得出C相电流信号。霍尔传感器采用CSNE151-100,其输出信号已转为电压信号,将该信号送至主控制器S3C2440的AD转换模块。由于信号容易受到干扰,因此需要对传感器所输出的信号进行RC滤波,电路图如图5所示。CSNE151-100的电压输出信号经滤波后,接入1个电压跟随器来减小阻抗,同时对其进行电压保护,并再次对该信号进行滤波,随后送至主控制器的ADC转换接口。
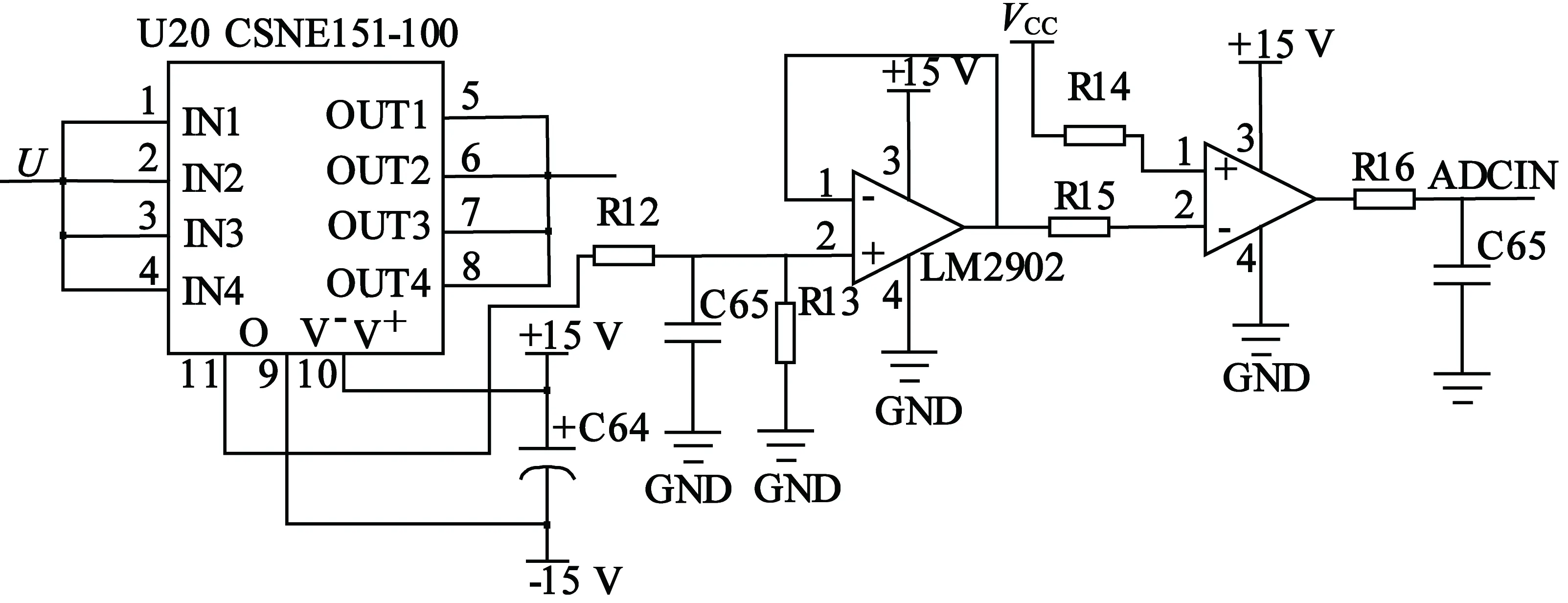
图5 电流检测电路
本文所设计的伺服系统需要多种电源供电,如PC机和变压器需要电网电压AC 220V,电流检测电路和滤波电路均需要±15 V的电压,在实验室中可由±15 V的开关电源来实现;如主控制器S3C2440需要5 V的电压,此时需要通过电源转换模块,如图6所示,采用了LM2596S 5.0开关电压调节芯片,可将开关电源的15 V转换为所需要的电压值5 V。

图6 电源转换电路
3 系统软件设计
本文选用Linux嵌入式操作系统,它是遵循GPL协议的开放源码操作系统,全部免费,日后软件的维护也相对简单[12]。使用的编译器为ARM-Linux-gcc4.3.3版本,内核为Linux-2.6.30.4。考虑到ARM板的存储空间有限,而内核的配置文件非常多,因此需对内核进行适当裁剪,去掉不需要的功能,只留下需要的芯片类型、文件系统和驱动程序。
S3C2440实现的功能有电机电流和转速的数据处理、电流控制器和速度控制器的控制、电机转向的控制、SVPWM模块的控制、6路PWM波的输出等。软件设计的工作就是在PC机上修改内核中和系统硬件相关的源代码文件,编程语言为C语言,并通过PC机和S3C2440板通信,使移植后的内核能在S3C2440平台上稳定运行。其中,电机的转向和转速会在S3C2440显示屏上显示,并通过按键来调整电机的转速值。
程序流程图如图7所示,以主程序为主。当系统上电后,开始参数初始化,然后等待循环。当发生外部中断时,程序从中断地址入口进入,并开始工作,中断程序如图8所示。系统的控制部分由中断程序完成,主要有速度环、电流环的参数计算和SVPWM波的生成。中断结束后,程序返回到主循环处,继续工作。

图7 主程序流程图
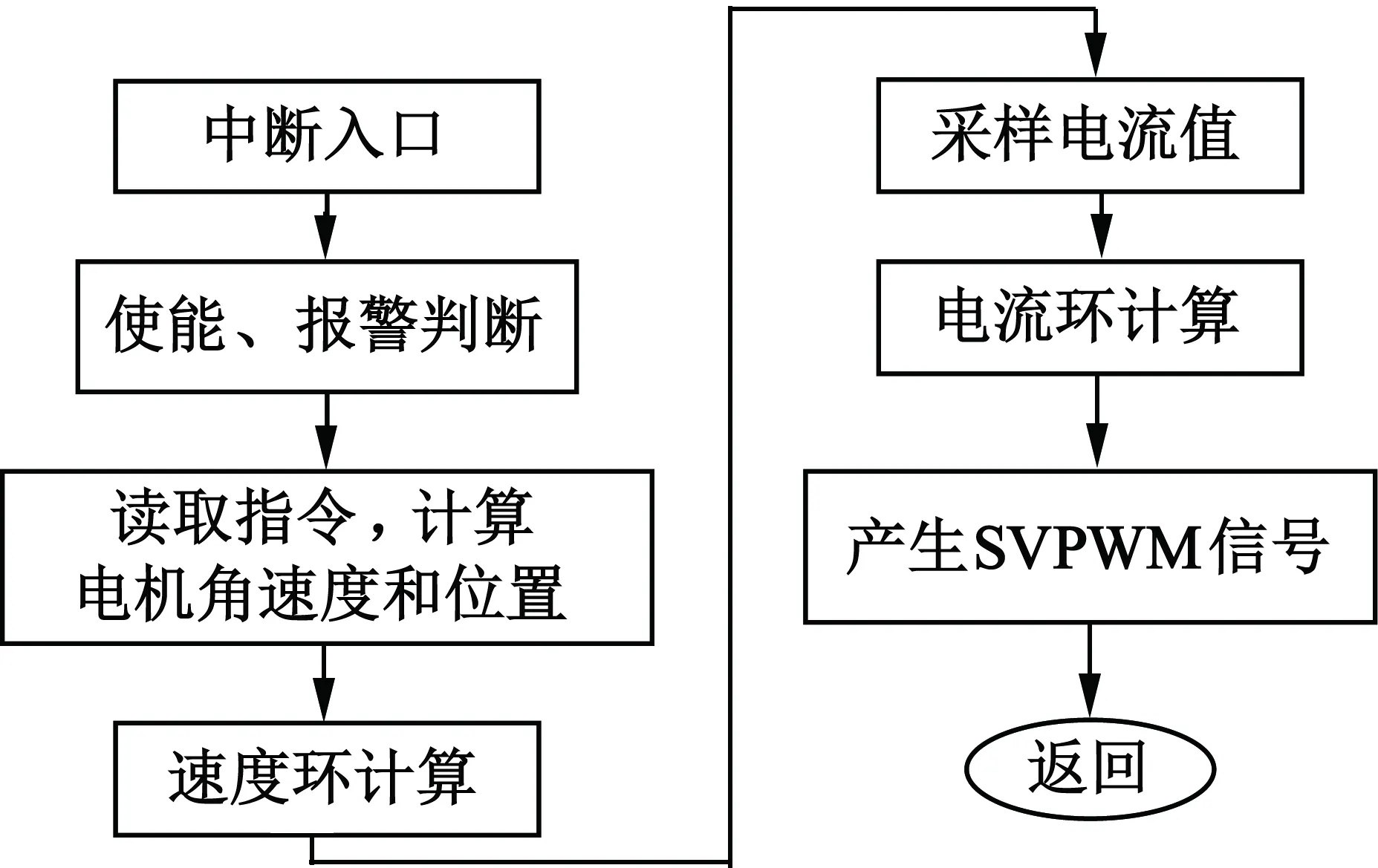
图8 中断程序流程图
4 系统实验
伺服电机系统中的PMSM参数如表1所示,型号为110DH-A06020H。
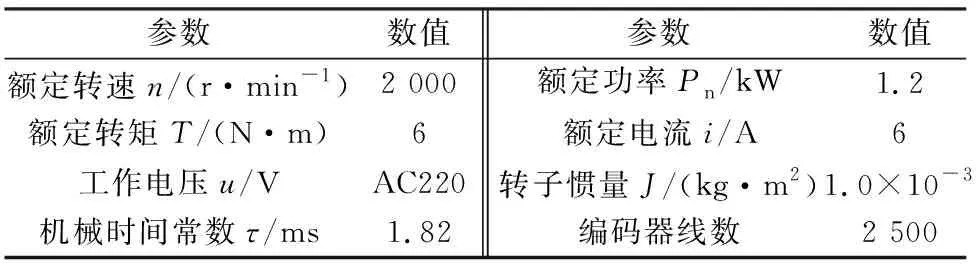
表1 电机参数
转子磁链ψr=0.3 Wb,电机极对数p=2,转动惯量J=1.0×10-3kg·m2,电机角速度ωrref=200 rad/s,电感Lq=6.5 mH。取参数Kp=112,Ki=54,可计算出PMSM的速度传递函数:
(9)
搭建的系统硬件实验平台如图9所示。

图9 实验硬件图
实验中用示波器来观察电机的控制波形,设定电机转速为2 000 r/min作为给定信号,电机开始转动,经过80 ms,电机转速降为0,可得到控制波形图如图10所示。
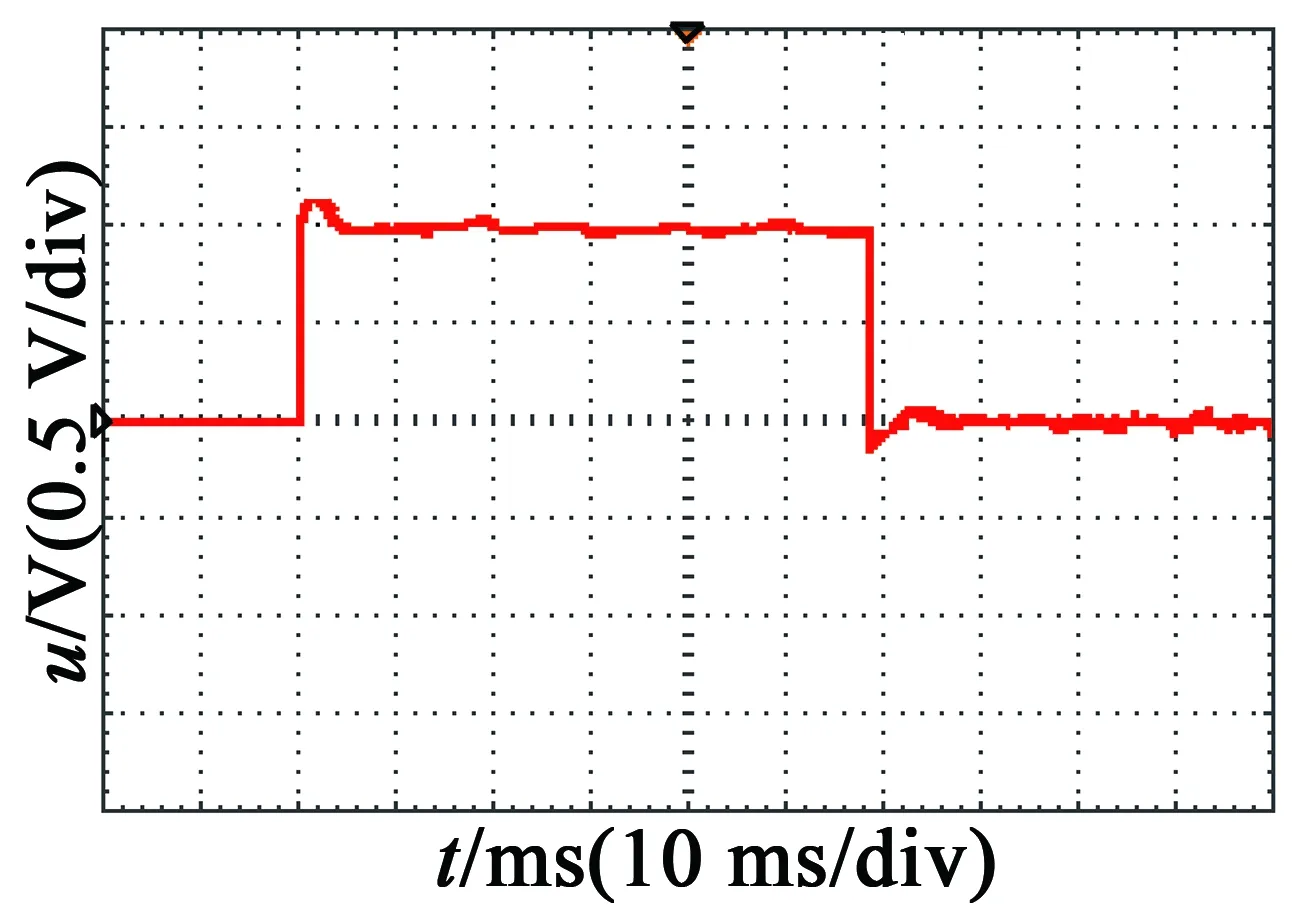
图10 电机控制波形图
从图10可以看出,电机的速度响应时间仅为25 ms,超调量为0.2%。从这2个指标来看,系统可保证电机快速起动和制动,且转速变化时波动很小,运行平稳。表明设计的高性能伺服系统的响应速度和动态性能都较好,控制系统是有效可行的。可以应用在机器人、自动化生产线等对工艺精度、加工效率和工作可靠性等要求相对较高的设备。
采用电流检测电路获得的U相电流波形如图11所示(测量时在电路中外加1 Ω的电阻,实际测得的是电压波形),其它两相基本一致。
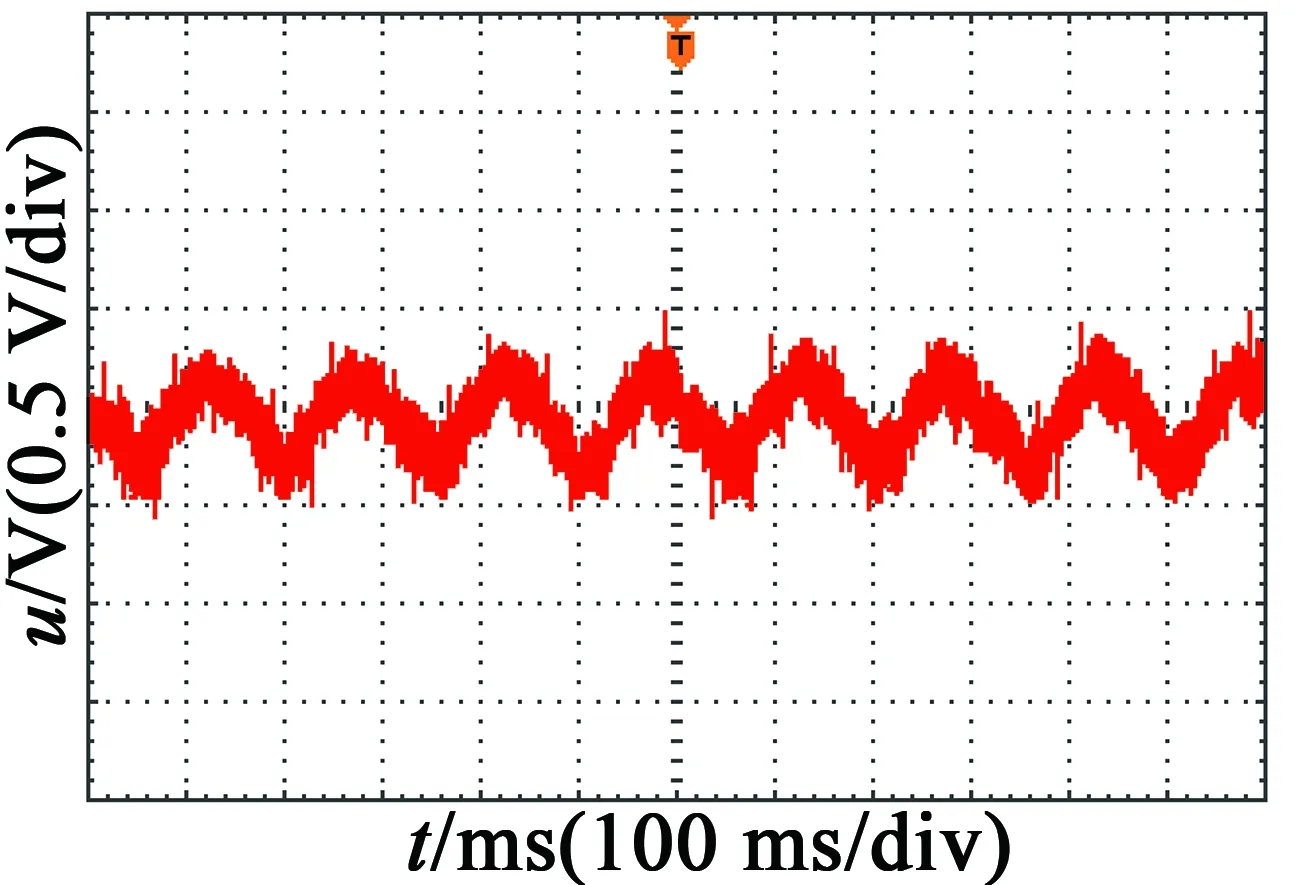
图11 U相电流波形
从图11可知,U相电流为正弦波形,幅值不超过0.5 V(对应的电流为0.5 A),而一般的U相电流会达到0.5~1 A,相比而言,本文测试的U相电流波形比较光滑。表明本文设计的控制程序能够较好地控制相电流,保证了电机的转动精度和平稳运行。
5 结 语
本文设计的高性能交流伺服电机控制系统,采用了S3C2440做主控器,并选择Linux系统来移植控制程序,设计了相关的硬件模块和软件控制模块。实验结果表明,该系统对电机的控制是有效可行的。而S3C2440控制器可实行软硬件裁剪式,节约成本的同时,降低了系统的复杂性,简化了应用程序,能够使电机平稳运行,提高了控制精度,为交流伺服系统提供了新的控制方式。
[1] 桑勇,李锋涛,代月帮,等.面向伺服电机的STM32单片机控制系统设计[J].机电工程技术,2015,44(11):65-72.
[2] 高靖凯,林荣文,张润波.永磁同步电机直接转矩控制的研究及算法改进[J].电机与控制应用,2015,42(11):16-20.
[3] 孙宇,王志文,孔凡莉,等.交流伺服系统设计指南[M].北京:机械工业出版社,2013.
[4] 王成元.现代电机控制技术[M].北京:机械工业出版社,2013.
[5] 李红伟,胡涛,徐熙平,等.基于单片机的伺服电机控制系统的研究[J].长春理工大学学报,自然科学版,2012 (1):116-118.
[6] 强明辉,张彦龙,马永炜,等.基于CAN总线多轴伺服控制系统的研究与应用[J].电气传动,2016,46(2):60-64.
[7] 王新君,巫庆辉,申庆欢.基于DSP的PMSM矢量控制的优化设计与实现[J].微特电机,2016,44(3):62-64.
[8] 赵莹,杜艳丽,李艳娟,等.基于ARM的磁浮轴承控制器的设计[J].机床与液压,2016,44(9):74-80.
[9] QUNTAO A,LI S.On-line parameter identification for vector controlled PMSM drives using adaptive algorithm[C]//IEEE Vehicle Power and Propulsion Conference,2008:1-6.
[10] SHAMELI E,KHAMESEE M B,HU ISSOON J P.Nonlinear controller design for a magnetic levitation device[J].Microsystem Technologies,2007,13(5):830- 834.
[11] 郭新华,温旭辉,赵峰,等.基于电磁转矩反馈补偿的永磁同步电机新型IP速度控制器[J].中国电机工程学报,2010,30(27):7-13.
[12] 屈杰敏.基于ARM和Linux的嵌入式数控系统研究与开发[D].南京:南京航空航天大学,2013.
DesignofHigh-PerformanceACServoMotorSystemBasedonARM
ZHANGYan-hong1,WANGLei2,WUXuan3,ZHANGJian-sheng1,WUZheng-tao4
(1.Changzhou Institute of Technology,Changzhou 213032,China;2.China North Communication Technology Co.,Ltd.,Xinxiang 453000,China;3.Nantong University,Nantong 226019,China; 4.Changzhou University,Changzhou 213164,China)
Abstract:The working principle of permanent magnet synchronous motor was analyzed, and a high performance AC servo system based on S3C2440 control was designed by using the advantage of the hardware and software of the S3C2440 chip. The hardware of the system mainly included control module, drive module and current detection module, which simplified the complexity of the circuit. The closed-loop PI vector control strategy of current loop and velocity loop was used. The experimental research of servo system was carried out and the experimental results showed that the control precision of the servo system has been improved.
Key words:permanent magnet synchronous motor (PMSM); S3C2440; double closed-loop PI control strategy; high-performance servo system
中图分类号:TM351;TM464
A
1004-7018(2018)05-0014-05
2017-09-28
国家自然科学基金项目(51175052);江苏省自然科学基金项目(BK20151182);校级科研项目(YN1622);江苏高校品牌专业建设工程资助项目(PPZY2015B129);2017年度江苏高校文化创意协同创新中心研究项目(XYN1706)
作者简介:张燕红(1979—),女,博士,副教授,主要研究方向为智能控制。
