子叶期钵苗补苗末端执行器设计与试验
2018-06-01梁喜凤肖玺泽朱宇豪王永维武传宇
梁喜凤,肖玺泽,朱宇豪,王永维※,武传宇
(1. 浙江理工大学机械与自动控制学院,杭州 310018;2. 浙江大学生物系统工程与食品科学学院,杭州 310058;3. 中国计量大学机电工程学院,杭州 310018)
0 引 言
中国是世界最大的蔬菜生产国和消费国,2015年全国蔬菜播种面积21 999.67×103hm2[1],占世界蔬菜播种面积的43%[2]。但蔬菜产业是一项劳动密集型产业,我国蔬菜生产综合机械化水平约为20%[3-4],且机械化作业主要集中在耕整地和田间管理环节,种植、收获等作业环节的机械化率极低,严重制约着蔬菜产业的持续发展。由于蔬菜育苗移栽的种植方式可充分利用光热资源、提高产量等优势,是当前蔬菜生产的主要种植方式,全球大约60%的蔬菜品种采用育苗移栽[5]。目前,法国、德国、荷兰、西班牙、意大利和丹麦等国多数蔬菜生产实现了全自动移栽[6-7],国内研发和应用的旱地移栽机主要有钳夹式[8-9]、挠性圆盘式栽植器[10-11]、导苗管式[12-13]、吊杯式[14-15]、连杆式[16]等半自动移栽机,栽植性能良好,由于受到人工送苗速度的限制,单行移栽频率小于40株/min[17],作业效率低,中国蔬菜种植对高速、全自动移栽机的需求十分迫切。但全自动移栽需要供给健壮、无空穴的秧苗才能保证移栽质量。如果采用符合国家标准要求发芽率高于 85%[18]的蔬菜种子进行精量播种育苗,使用达到国家标准规定栽植合格率大于 90%的全自动移栽机进行移栽[19],移栽定植后田间有效苗也可能低于 80%,显然穴盘缺苗是影响全自动移栽质量的主要因素之一。
为了减少由于种子质量、基质环境等引起穴盘出现无苗空穴而影响移栽作业质量,须在移栽过程或育苗阶段对穴盘无苗穴孔进行补苗。移栽过程中补苗多是通过缺苗检测系统检测到穴盘的无苗空穴,再通过控制系统控制补苗装置进行补苗,主要研究如Tai等[20]开发了一种机器视觉移钵系统,检测空穴孔的准确率达95%;金鑫[21]开发的自动识别取苗系统通过对幼苗茎杆进行识别,判断穴盘穴格有无苗;蒋焕煜等[22]开发了穴盘钵苗健康状态信息检测,利用机器视觉技术获取穴盘钵苗的健康信息等;刘姣娣等[23]开发了自动补苗装置并通过PID控制实现了大田移栽时缺苗的补苗;贺磊盈[24]、童俊华等[25]针对温室内钵苗从高密度到低密度穴盘稀植移栽进行了利用贪心遗传算法优化穴盘苗移栽路径研究,但现有研究成果主要集中在基于视觉成像的成苗检测与识别,对枝叶茂盛的成苗检测成功率会降低,自动移栽过程增加补苗系统也会增加移栽机的复杂性。如果在育苗早期或中期对穴盘空穴补苗,可以在苗床上批量、集中、高效地开展补苗工作,特别是子叶期幼苗枝叶相互无遮挡,图像识别成功率高,补苗部件不损伤周围的幼苗,不影响成苗后根坨与穴孔壁粘附力,将为全自动移栽提供无空穴、长势整齐、健康的钵体苗,提高自动移栽的作业质量。但子叶期幼苗茎叶细小、脆嫩,根系尚未与基质形成相对结实的根坨,取苗时幼苗易受到损伤、培养基质易松散,而现有移栽机的取苗机构如顶出式[26]、顶出夹取式[27]、夹取式[28-29]、四针钳夹式[30]、两针钳夹式[31-32]等,均是针对成苗取苗开发的,适用于根系发达已形成结实根坨的钵体苗取苗,对于子叶期穴盘苗采用上述方式直接取苗会使根坨溃碎,无法完整无损地取出松散的子叶期钵体苗或无苗基质。因此,完整无损地取出子叶期钵苗是育苗早期补苗的关键技术难题之一。
为了实现将子叶期钵体苗或无苗基质完整取出并为补苗机械手提供性能优良的末端执行器,本文设计并试制了包裹式子叶期钵体苗补苗末端执行器及试验台,试验研究了补苗末端执行器取出不同基质配比、不同含水率和不同苗龄钵体幼苗时的取苗性能,以及基质配比与含水率、苗龄对取苗性能的影响,确定较佳的取苗参数,为育苗阶段子叶期补苗系统开发奠定基础。
1 子叶期钵体苗补苗末端执行器设计
为了能够将子叶期钵体苗完整无损地取出,针对子叶期钵体苗植株脆嫩、根系不发达、根坨松散易碎等特点,设计了子叶期蔬菜钵体苗补苗末端执行器,结构如图1所示,F形机架与底台固定组成E字形结构,滚珠丝杆机构的丝杆通过轴承安装在底台和机架上,X形压杆中心与丝杆螺母固定并可沿垂直导轨升降,底台 4个均布的倾斜面安装倾斜导轨,4只苗铲固定在倾斜导轨的滑块上,苗铲通过X形压杆推压固定在苗铲上的导向板和滑轮完成运动方向的改变并上下移动,4只苗铲同步倾斜向下运动时逐渐形成接近封闭的包裹式梯台结构,能够伸入穴孔内将子叶期钵体苗四周包围后取出;苗铲向上运动时逐渐横向扩大,直到4只苗铲底部与穴孔4个角重合,完成补苗[33]。

图1 子叶期蔬菜钵苗补苗末端执行器基本结构Fig.1 Basic structure of pot-seedling supplementing end-effector for vegetables in cotyledon phase
1.1 补苗方法
子叶期钵体苗补苗末端执行器取苗、补苗方法如图2所示,具体过程如下:
1)取苗初始时,子叶期钵苗补苗末端执行器在备用苗正上方,4只苗铲在上极限位置;
2)末端执行器整体垂直下降到备用苗穴孔上方,4只苗铲下边缘与穴孔4个角相对,此时子叶期植株地上部分位于底台下方空间且不受压;
3)控制步进电动机正转,滚珠丝杆机构带动X形压杆向下运动,X形压杆的 4支倾斜杆压向导向板上的滑轮,导向板带动苗铲沿倾斜导轨向下运动,4只苗铲插入穴孔基质中并在最大深度处形成四周接近封闭的包裹式结构,待取钵体苗的外侧便被4只苗铲包裹;
4)子叶期钵体苗补苗末端执行器整体垂直上移,取出待取钵体苗;然后平移至待补苗穴盘的穴孔正上方;
5)子叶期钵体苗补苗末端执行器垂直下降,直到 4只苗铲到达补苗穴孔最深处;
6)控制步进电动机反转,X形压杆、苗铲做相反的运动,以倾斜导轨下端作为挡土板反推钵体苗,4只苗铲倾斜上升,苗铲退出待补苗穴孔,完成备用苗释放至目标穴孔的补苗过程;
7)子叶期钵体苗补苗末端执行器上升,完成1次取出备用苗并补入目标穴孔的动作。
从目标穴盘取出无苗穴孔中的基质过程同上述1)~3),然后将子叶期钵体苗补苗末端执行器平移到预定位置,控制步进电动机反转工作,去除被取出的无苗基质,为补苗穴孔清空原始的基质。
1.2 结构设计
钵体苗补苗末端执行器结构参数要依据育苗采用的穴盘穴孔形状与尺寸以及取苗要求进行设计。现有育苗穴盘的穴孔形状多为梯台形,图 3为苗铲插入穴孔钵体苗后苗铲与穴孔壁的位置关系。取苗要求:1)不得损伤植株地上部分;2)尽量多取出基质,保持根坨形状以避免对根系的损伤。为了能够完整无损地取出子叶期钵体苗,采用分别与穴孔4个倾斜壁面平行的4块平板插入基质中,形成包裹式结构将根坨侧面包围,平板在插入、拔出根坨过程中其垂直面不对基质形成挤压,从而防止了对根坨的破坏和根系的损伤。由预试验知,穴孔中根坨的 4角最易破裂,不易取出,同时考虑提高苗铲的刚度,苗铲设计为角形结构,两角面宽约为穴孔倾斜台面的 50%,分别与穴孔两倾斜面平行;为了防止损伤脆嫩的植株茎叶,底台与穴孔上口平面的距离大于子叶期后期植株高度。由图 3知,补苗机械手末端执行器的几何约速条件为式(1)
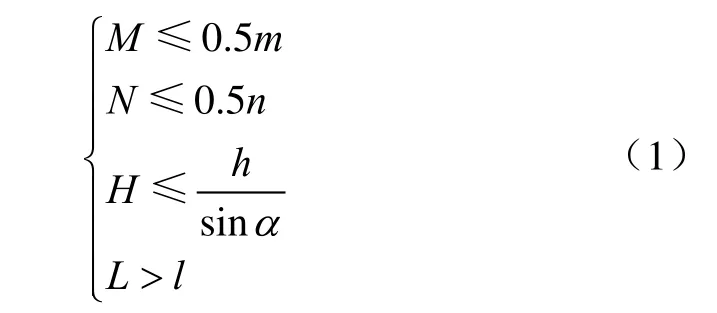
式中M为苗铲顶部半角面宽,mm;N为苗铲底部半角面宽,mm;H为苗铲在穴孔壁面插入长度,mm;h为穴孔深度,mm;L为苗铲插入穴孔时底台下表面与穴孔上口平面的距离,mm;m为穴孔上口内部尺寸,mm;n为穴孔底部内部尺寸,mm;l为子叶后期幼苗高,mm;α为穴孔纵向对称面半锥角,(°)。

图2 子叶期蔬菜钵苗补苗末端执行器取苗补苗过程Fig.2 Process of seedling picking and supplementing of pot-seedling supplementing end-effector for vegetables in cotyledon phase

图3 苗铲插入钵体后苗铲与穴孔壁位置关系Fig.3 Position relationship while seedling shovels inserting into the pot hole

式中τ为泥炭土抗剪强度,Pa;c为泥炭土粘聚力,Pa;k为泥炭土内摩擦系数;σ为正应力,Pa。
苗铲插入钵苗是苗铲剪切穴孔中基质的过程,可按式(3)计算

式中F为苗铲插入钵苗的阻力,N;S为苗铲面积,m2。
因苗铲插入钵苗时在垂直于苗铲壁无正压力,苗铲插入钵苗的阻力主要由基质黏聚力引起,根据泥炭土剪切试验结果取粘聚力c=3.4 MPa[34],依据4个苗铲实际插入钵体苗的最大面积计算,苗铲插入钵苗阻力为8.54 N,并依此力计算配置滚珠丝杆机构、步进电动机等,集成
常用 72孔穴标准穴盘的穴孔规格尺寸为上口径38 mm × 38 mm,底部 19 mm × 19 mm,深 45 mm。根据式(1)结构参数约束条件,同时考虑补苗机械手末端执行器移动时的精度,按苗铲外壁面与穴孔保持1 mm的间隙计算结构参数并圆整得 M=16.5 mm、N=8.0 mm、H=40.0 mm、L=60.0 mm、α=12°,为降低苗铲插入基质时的阻力,苗铲下缘为弧形并加工成锐边。
苗铲插入钵体苗时的阻力为苗铲剪切基质的剪切力,从穴孔中取出苗时阻力只有苗铲外壁与基质的摩擦力,补苗至已取出无苗基质穴孔后苗铲收缩时,阻力主要是苗铲内外壁面与基质的摩擦力,可见苗铲插入穴孔时阻力最大。育苗时基质主要成份为泥炭土,而泥炭土抗剪强度符合摩尔破坏理论并按式(2)计算[34]:了子叶期钵体苗补苗末端执行器。
2 材料与方法
2.1 试验材料
试验所选钵苗为浙杂 809番茄苗,育苗穴盘为标准蔬菜育苗72孔穴穴盘。育苗基质采用德国维特泥炭、蛭石和珍珠岩,按照不同基质成分体积比配置。穴盘苗于2016年3月25日在浙江大学农业试验站玻璃温室内播种培育,采用喷淋式灌溉。
为了对子叶期钵体苗补苗末端执行器的性能进行试验,试制了能够升降、平移的二维运动工作平台,并与子叶期蔬菜钵体苗补苗末端执行器组成补苗试验台,如图 4所示。试验台控制系统由计算机、控制软件、单片机以及步进电机驱动器等组成,如图 4a,计算机通过控制软件输入命令至单片机,单片机发出控制信号控制各步进电机工作,从而完成子叶期钵体苗补苗末端执行器升降、平移、取苗、放苗等动作。

图4 子叶期蔬菜钵苗补苗末端执行器补苗控制系统与试验台Fig.4 Control system and test-platform of seedling supplementing of pot-seedling supplementing end-effector for vegetables in cotyledon phase
2.2 试验方案
子叶期钵体苗补苗末端执行器主要功能是在蔬菜钵体苗育苗子叶期将穴盘穴孔中无苗的基质取出,将备用的同龄苗及其培育基质整体移入待补苗的穴孔中,为全自动机械化移栽提供无空穴盘苗。取苗过程中,子叶期幼苗与基质构成的钵体苗的机械力学特性直接影响子叶期钵体苗补苗末端执行器的性能,因此需在不同钵苗性状时试验研究子叶期钵体苗补苗末端执行器性能以及钵苗特性如基质组成与含水率、苗龄等对子叶期钵体苗补苗末端执行器性能的影响。
2.2.1 试验评价指标
取苗时保持子叶期钵体苗完整性的重要指标是取苗过程中基质散落比例,但目前尚无相关评价指标。为了客观评价子叶期钵苗补苗末端执行器的取苗、补苗性能,以穴孔基质取净率、无苗基质取出成功率、钵苗取苗成功率和补苗成功率作为主要评价指标,并作如下定义:子叶期蔬菜钵苗补苗末端执行器为包裹式结构,损失的基质主要是取苗铲外侧与穴孔间的基质、穴孔底部未取出基质和取苗后移动过程中从 4个苗铲间漏出的基质,定义基质取净率为子叶期蔬菜钵苗补苗末端执行器由子叶期备用苗穴孔取出后钵苗的质量占取苗前钵体苗总质量的百分比

式中P为基质取净率,%;ma为取出前钵苗的总质量,g;mb为取出后钵苗的质量,g。
钵苗取出成功与否和整体取出基质量密切相关,由于子叶期钵苗补苗末端执行器苗铲与穴孔四周有一定的间隙,使无苗待补苗穴孔、备用苗穴孔在取苗时苗铲外侧的基质均未取出,这部分基质不影响补苗质量;另外,子叶期幼苗较小且十分细弱,根系主要分布于钵苗的中上部,试验时未取出基质集中在穴孔底部以及苗铲外侧的穴孔壁上,同时参考钵体散落试验结果番茄成苗钵体跌落后基持损失22.73%仍保持形状[35],因此,子叶期蔬菜钵苗补苗末端执行器从穴孔中取出钵苗、无苗基质时基质取净率大于 75%时判为取苗成功,并以此标准定义取苗成功率为子叶期蔬菜钵苗补苗末端执行器从穴孔中取出钵苗时基质取净率大于 75%穴孔数占取钵苗穴孔总数的百分比

式中ks为取苗成功率,%;Xss为取钵苗时取净率大于75%穴孔数;Xst为取钵苗穴孔总数。
定义无苗基质取出成功率为子叶期蔬菜钵体苗补苗末端执行器从穴孔中取出无苗基质时基质取净率大于75%穴孔数占取空穴穴孔总数的百分比

式中kn为无苗基质取出成功率,%;Xns为取出空穴基质时基质取净率大于75%的穴孔数;Xnt为取空穴穴孔总数。
备用穴盘苗由穴孔中取出并移动、补入目标穴孔的过程中钵苗的基质均可能发生损失,将备用钵苗补入目标穴孔后的质量占取出前钵苗总质量的百分比定义为基质保持率

式中λ为基质保持率,%;mc为补入目标穴孔后钵体苗的质量,g。
参考番茄成苗钵体跌落后基持损失22.73%仍保持形状[35],定义补苗成功率为子叶期蔬菜钵苗补苗末端执行器将钵苗取出、移动并补入目标穴孔后钵苗基质保持率大于75%穴孔数占总补苗穴孔数的百分比

式中kb为补苗成功率,%;Xbs为补苗后基质保持率大于75%的穴孔数;Xbt为补苗总穴孔数。
2.2.2 试验因素与水平
影响子叶期钵体苗补苗末端执行器的取苗性能主要因素为钵苗自身物理机械特性,而基质配比、含水率和幼苗苗龄通过影响基质孔隙性、弹塑性、幼苗根系与基质结合状态而影响钵体苗自身物理机械特性。因此,选择基质配比、基质含水率和幼苗苗龄为试验因素。
1)基质配比。基质配比直接影响基质孔隙性、弹塑性、密度,从而影响钵体苗的弹性、塑性,依照标准NY/T 2118-2012的蔬菜育苗基质要求,育苗基质是泥炭、蛭石、珍珠岩的混合物,参考适宜番茄育苗常见的基质配比[35-37],泥炭、蛭石、珍珠岩的体积比为配比1(2∶2∶1)、配比2(6∶3∶1)、配比3(7∶2∶1),因此选以上3个配比并作为3个水平。
2)基质含水率。基质含水率影响基质的粘结力和幼苗生长发育,由于含水率过低钵苗易干枯死亡,长时间的饱和含水率也不利于幼苗生长发育,取苗时钵苗基质含水率应在适宜的范围内。相关研究钵苗力学特性时基质含水率在60%~90%之间[33-34],因钵苗基质含水率难以精确控制和提前预知,所以通过控制灌溉后间隔的时间进行取苗试验,以取苗时实测基质含水率为准,对每种基质配比的钵苗分别测定基质含水率 3次并取平均值,选取3个平均含水率水平。
3)苗龄。钵苗是幼苗根系与基质缠绕形成的基 质-根系复合体,而钵苗根系生长情况与幼苗苗龄密切相关。由于子叶期钵苗补苗末端执行器的补苗在子叶期进行,试验用番茄苗在苗龄16 d时进入子叶期,苗龄 26 d时为子叶期未2叶期初,故分别取16、21、26 d为3个苗龄水平。
综上确定试验因素与水平如表1。
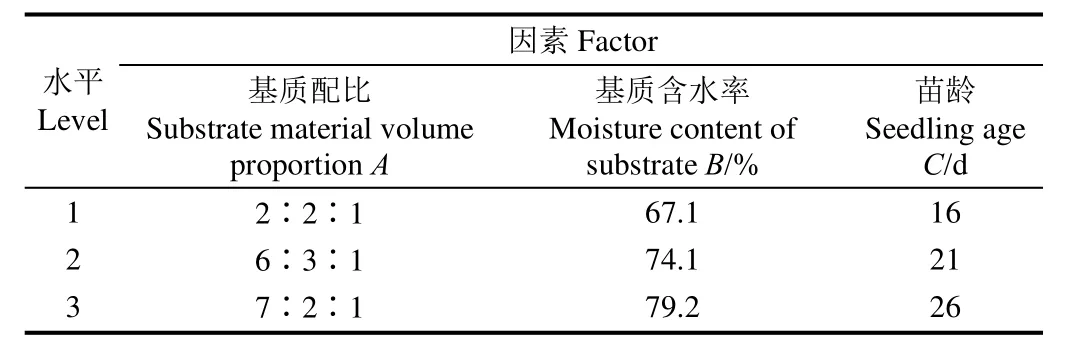
表1 因素水平表Table 1 Factors and levels
2.2.3 试验方法
为了研究子叶期钵体苗补苗末端执行器取出不同性状钵体苗的取净率,同时获得钵体苗的基质配比、含水率、苗龄对取净率的影响,按表 1进行三因素三水平的L934正交试验,共9次试验,每次试验重复取苗24株,测定基质取净率,取平均值。
基质取净率、基质保持率测定方法:对子叶期蔬菜钵苗补苗末端执行器取出钵苗的整体质量、残留在培养穴孔中基质质量、补入目标穴孔中钵苗质量分别利用MW-6000C电子天平(精度:0.01 g)称量,并分别按式(4)、式(7)计算基质取净率、基质保持率。
基质含水率测定:对每种基质配比的钵苗随机取 3株,采用干湿质量法测量分别测定基质含水率,平均值。
试验时,通过计算机设定子叶期钵苗补苗末端执行器苗铲插入、退出钵体苗的速度为30 mm/s;同时设定子叶期钵苗补苗末端执行器整体升降速度为720 mm/s、平移速度800 mm/s。因末端执行器整体升降、平移时苗铲与钵体苗无相对运动,且实际补苗时未端执行器安装在机械手上因路径不同而移动速度也不同,所以末端执行器升降、平移速度未进行测试;而苗铲插入、退出钵体苗时对钵体苗直接接触且影响钵体苗的完整性,故对苗铲插入、退出钵体苗时速度进行采用speedtro-50激光测距测速仪(精度:±1 mm/s)测定,测取10次取苗时苗铲插入、退出钵体苗时的苗铲速度,并分别计算平均值。
以基质取净率试验结果为基础,选择最适宜子叶期钵体苗补苗末端执行器子叶期取苗的钵体苗条件进行取苗试验,测定基质取净率、基质保持率并统计计算无苗基质取出成功率、取苗成功率、补苗成功率。
3 结果与分析
试验于2016年4月10日至20日在浙江大学进行,为了能够定量测定取苗前后钵苗的质量,待补穴孔采用空穴,取苗、补苗试验过程如图5。实测取苗时苗铲插入与退出钵体苗时的苗铲平均速度分别为29.85、31.12 m/s。

图5 子叶期蔬菜钵体苗补苗末端执行器补苗过程Fig.5 Process of seedling supplementing of the pot-seedling supplementing end-effector for vegetables in cotyledon phase
3.1 钵苗性状对取净率的影响
按照 L934正交试验表,不同基质配比、含水率和苗龄组合时的进行9次试验结果如表2。由表2可知,在基质配比(6∶3∶1)、基质含水率67.1%、苗龄21 d时平均基质取净率为71.52%,主要是由于基质中蛭石含量高同时含水率低导致基质粘结性差引起的,随着基质含水率升高,平均基质取净率明显升高并大于 75%;其余试验条件下子叶期蔬菜钵体苗补苗末端执行器对穴孔基质的平均基质取净率基本大于 75%,取出后钵体苗保持完整,满足子叶期无苗基质和备用钵钵苗取出的要求,且基质配比(2∶2∶1)、基质含水率79.2%、苗龄26 d时平均基质取净率最高,为89.45%。可见,在常见的基质配比、适宜幼苗生长的基质含水率条件下子叶期蔬菜钵体苗补苗末端执行器对苗龄16~26 d的番茄穴盘苗基本均能完整、无损地取出。
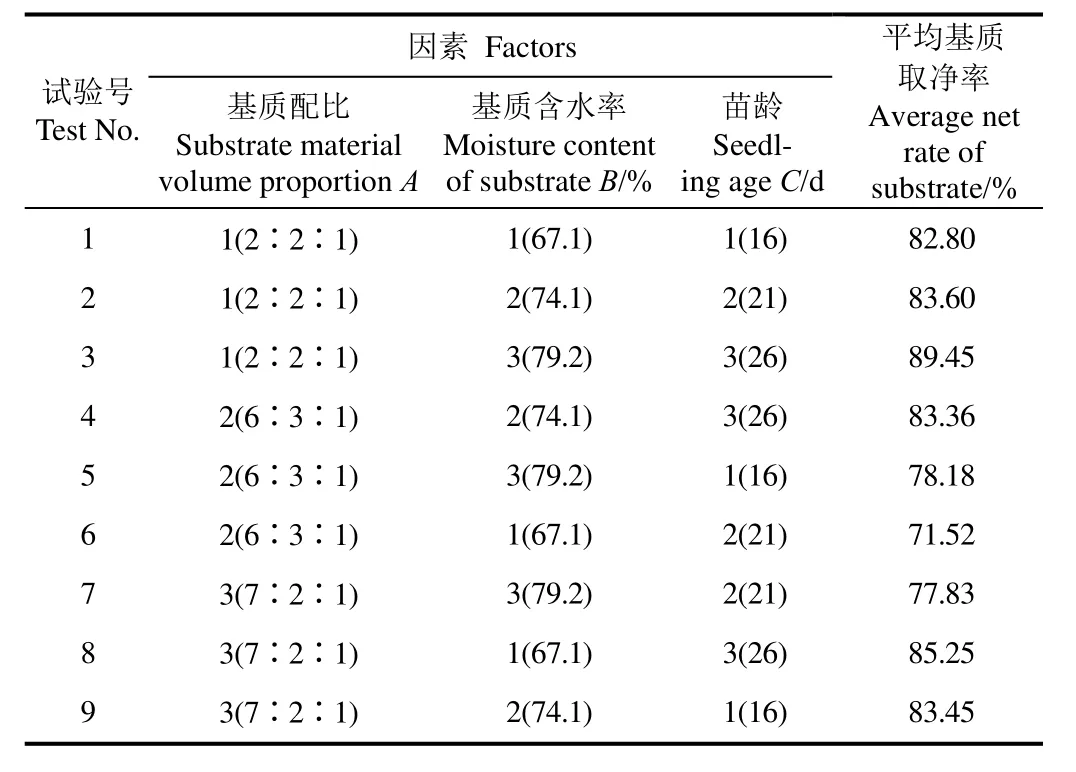
表2 正交试验结果Table 2 Results of orthogonal experiments
对表2数据进行方差分析,结果如表3,基质配比和苗龄对取净率的影响均为显著(P<0.05),含水率对取净率的影响为不显著(P>0.05)。
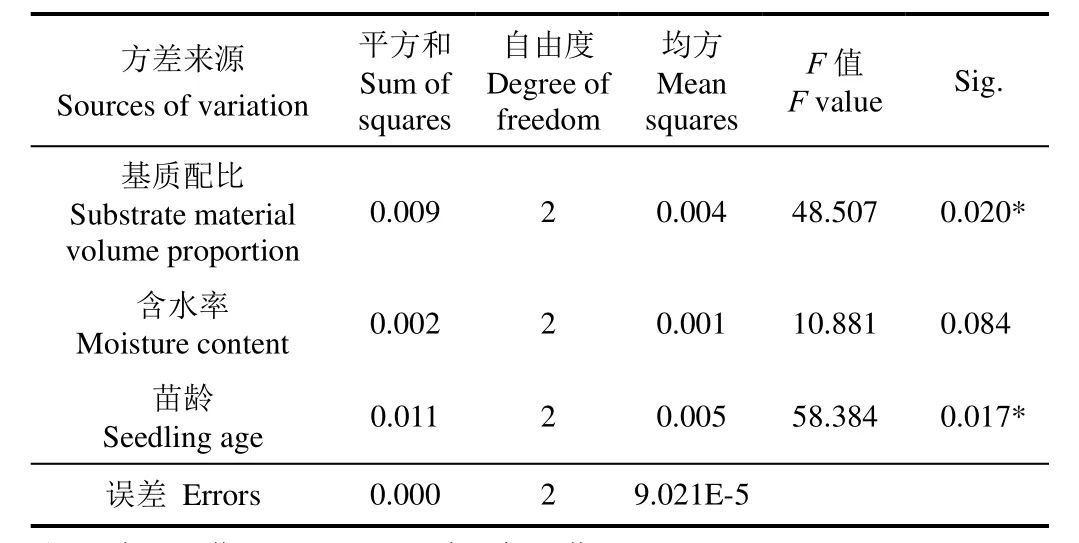
表3 取净率方差分析Table 3 Variance analysis of net rate
对表2数据进行极差分析,结果如图6。极差最大的为苗龄,其值为8.3%,其在子叶期苗龄越大幼苗根系越发达,有利于提高取净率。其次是基质配比,其值为7.6%,采用水平1(2∶2∶1),可有效提高取净率;极差最小的因素为含水率,基质含水率为74.1%左右时,钵体粘结力和可塑性最好。根据以上 L934正交试验分析可得,使取净率最大的较优组合为C3A1B2,即苗龄为26 d、基质配比2∶2∶1、含水率74.1%,此时移植后钵苗能够较完整的保持其形状和体积,适于机械化补苗作业。

图6 指标因素图Fig.6 Index factors
3.2 钵苗取出、补苗成功率试验结果与分析
选取基质配比2∶2∶1、苗龄26 d的子叶期未6盘番茄幼苗,共 432穴,进行取出无苗基质和取苗、投苗试验,结果如表4。取苗后测定平均基质含水率为75.5%。由表 4知,子叶期蔬菜钵体苗补苗末端执行器的无苗基质取出成功率、取苗成功率、补苗成功率均达100%,能够实现对植株脆嫩、根坨易松散的子叶期钵体苗整体取出并完整补入目标穴孔,取苗、补苗性能良好。
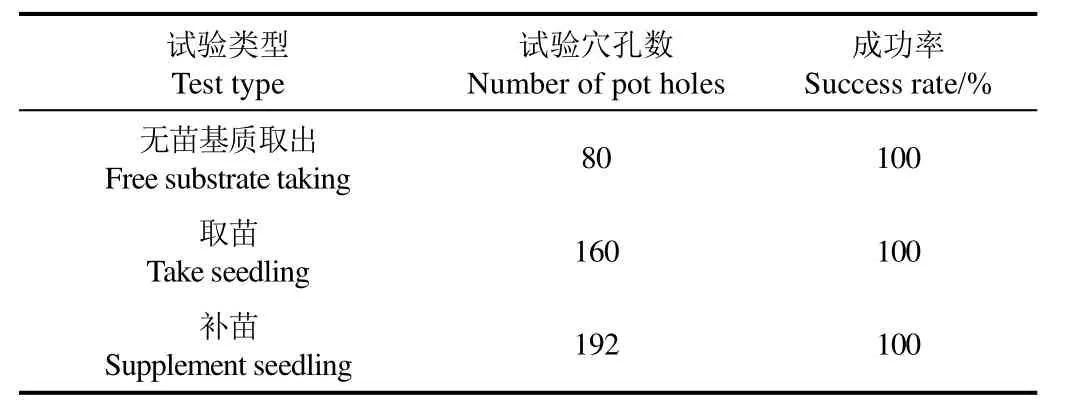
表4 取苗-补苗试验结果Table 4 Test results of seedling taking and supplementing
4 结 论
1)设计了一种用于育苗过程中对穴盘无幼苗穴孔在子叶期进行补苗的子叶期钵体苗补苗末端执行器,在取出穴孔中无苗基质或备用钵体苗时,4只苗铲同步沿穴孔壁插入无苗基质或备用钵体苗中,对根坨四周形成接近包裹式结构并整体取出钵体苗,移至目标穴孔后收回苗铲将备用苗移入待补苗穴孔,实现了对植株柔嫩、根系不发达、根坨易松散的子叶期钵体苗整体取苗并补入目标穴孔。
2)幼苗苗龄、基质配比对子叶期钵体苗补苗末端执行器取出无苗基质或子叶期钵体苗的取净率影响显著,在子叶期随着苗龄的增长,取净率逐渐增大,子叶期未、2真叶期补取净率最高为 89.45%;育苗基质中泥炭、蛭石、珍珠岩配比为 2∶2∶1时取净率较高;基质含水率在67.1%~79.2%时对基质取净率影响不显著,但基质含水率74.1%时,钵体粘结力和可塑性好,取净率较高;取净率最大的较优组合苗龄为26 d、基质配比2∶2∶1、基质含水率74.1%,此时补苗钵苗能够完整地保持其形状和体积。对常见的基质配比、基质含水率67.1%~79.2%、苗龄16-26 d的番茄穴盘苗子叶期蔬菜钵体苗补苗末端执行器基本均能完整、无损地取出。
3)对子叶期26 d番茄钵体苗,基质配比2∶2∶1、基质含水率75.5%,子叶期蔬菜钵体苗补苗末端执行器的取出无苗基质成功率、取苗成功率、补苗成功率均为100%,补苗成功率为100%。
[参 考 文 献]
[1] 中华人民共和国国家统计局. 2016中国统计年鉴[M]. 北京:中国统计出版社,2016.
[2] 陈清,云建,陈永生,等. 国内外蔬菜移栽机械发展现状[J]. 蔬菜,2016,(8):76-79.
[3] 陈永生,胡桧,肖体琼,等. 我国蔬菜生产机械化现状及发展对策[J]. 中国蔬菜,2014(10):1-5.
[4] 高庆生,胡桧,陈清,等. 我国设施蔬菜机械化起垄技术应用现状及发展趋势[J]. 中国蔬菜,2016(7):4-7.
[5] 金鑫,李树君,杨学军,等. 蔬菜钵苗取苗机构运动分析与参数优化[J]. 农机化研究,2014,36(7):13-17.Jin Xin, Li Shujun, Yang Xuejun, et al. Motion analysis for vegetable potted seedling pick-up mechanism with double crank geared linkages[J]. Journal of Agricultural Mechanization Research, 2014, 36(7): 13-17. (in Chinese with English abstract)
[6] 周海燕,杨炳南,颜华,等. 旱作移栽机械产业发展现状及展望[J]. 农业工程,2015,5(1):12-13,16.Zhou Haiyan, Yang Bingnan, Yan Hua, et al. Status quo and development prospects of dry land transplanting machine industry[J]. Agricultural Engineering, 2015, 5(1): 12-13,16.(in Chinese with English abstract)
[7] 于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J].农业机械学报,2014,45(8):44-53.Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8):44-53. (in Chinese with English abstract)
[8] Satpathy S K, Garg I K. Effect of selected parameters on the performance of a semi-automatic vegetable transplanter[J].Agricultural Mechanization in Asia, Africa & Latin America,2008, 39(2): 47-51.
[9] 金诚谦,吴崇友,袁文胜. 链夹式移栽机栽植作业质量影响因素分析[J]. 农业机械学报,2008,39(9):196-198.Jin Chengqian, Wu Chongyou, Yuan Wensheng. Study on the quality of seeding transplanting factors of chain type transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(9): 196-198. (in Chinese with English abstract)
[10] 王石,王笑岩,李成华. 基于量子遗传算法的挠性圆盘式移栽机投苗系统参数优化方法[J]. 中国农机化学报,2014,35(2):139-142.Wang Shi, Wang Xiaoyan, Li Chenghua. Parameters optimization of soft disc-type vegetable seedling transplanting mechanism based on quantum genetic algorithm[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 139-142. (in Chinese with English abstract)
[11] 胡军. 挠性圆盘式大葱移栽机的优化设计与试验研究[D].北京:中国农业大学,2003.Hu Jun. The Optimum Design Method and Test of Scallion Transplanter with Two Flexible Metal Disks[D]. Beijing:China Agricultural University, 2003. (in Chinese with English abstract)
[12] 董哲,林选知,张瑞勤,等. 导苗管式移栽机的烟苗移栽质量影响因素分析[J]. 农机化研究,2012,34(4):38-41.Dong Zhe, LinXuanzhi, ZhangRuiqin, et al. Quality of flue-cured tobacco seedling transplanting factors analysis with transplanter with chute[J]. Journal of Agricultural Mechanization Research, 2012, 34(4): 38-41. (in Chinese with English abstract)
[13] 倪向东,梅卫江. 导管式番茄移栽机的设计[J]. 农机化研究,2011,33(2):84-86.Ni Xiangdong, Mei Weijiang. Design on the tomato transplanting machine[J]. Journal of Agricultural Mechanization Research, 2011, 33(2): 84-86. (in Chinese with English abstract)
[14] 崔巍,赵亮,宋建农,等. 吊杯式移栽机栽植器运动学分析与试验[J]. 农业机械学报,2012,43(增刊 1):34,35-38.Cui Wei, Zhao Liang, Song Jiannong, et al. Kinematic analysis and experiment of dibble-type planting devices[J].Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp.1): 34, 35-38. (in Chinese with English abstract)
[15] 王永维,唐燕海,王俊,等. 蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J]. 农业机械学报,2016,47(1):91-100.Wang Yongwei, Tang Yanhai, Wang Jun, et al. Parameters’optimization for the dibble-type planting apparatus of vegetable pot seedling transplanter in high-speed condition[J].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 91-100. (in Chinese with English abstract)
[16] 陈建能,王伯鸿,张翔,等. 多杆式零速度钵苗移栽机植苗机构运动学模型与参数分析[J]. 农业工程学报,2011,27(9): 7-12.Chen Jianneng, Wang Bohong, Zhang Xiang, et al. Kinematics modeling and characteristic analysis of multi-linkage transplanting mechanism of pot seeding transplanter with zero speed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011,27(9): 7-12. (in Chinese with English abstract)
[17] 韩长杰,杨宛章,张学军,等. 穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报,2013,29(8):51-61.Han Changjie, Yang Wanzhang, Zhang Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013,29(8): 51-61. (in Chinese with English abstract)
[18] 瓜菜作物种子 第3部分:茄果类:GB16715.3-2010[S]. 北京:中国标准出版社,2010.
[19] 旱地移栽机械:JB/T 10291-2013[S]. 北京:中国标准出版社,2013.
[20] Tai Y W, Ling P P, Ting K C. Machine vision assistedrobotic seedling transplanting[J]. Transactions of the Asae, 1994,37(2): 661-667.
[21] 金鑫. 蔬菜穴盘苗自动移栽技术与装置的研究[D]. 北京:中国农业大学,2014.Jin Xin. Research on Automatic Transplanting Technology and Device for Vegetable Plug Seedling[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[22] 蒋焕煜,施经挥,任烨,等. 机器视觉在幼苗自动移钵作业中的应用[J]. 农业工程学报,2009,25(5):127-131.Jiang Huanyu, Shi Jinghui, Ren Ye, et al. Application of machine vision on automatic seedling transplanting[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2009, 25(5): 127-131. (in Chinese with English abstract)
[23] 刘姣娣,曹卫彬,许洪振,等. 自动补苗装置精准定位自适应模糊PID控制[J]. 农业工程学报,2017,33(9):37-44.Liu Jiaodi, Cao Weibin, Xu Hongzhen, et al. Adaptive fuzzy-PID control of accurate orientation for auto-detect seedling supply device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 37-44. (in Chinese with English abstract)
[24] 贺磊盈,杨太玮,武传宇,等. 基于贪心遗传算法的穴盘苗补栽路径优化[J]. 农业机械学报,2017,48(5):36-43.He Leiying, Yang Taiwei, Wu Chuanyu, et al. Optimization of replugging tour planning based on greedy genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(5): 36-43. (in Chinese with English abstract)
[25] 童俊华,蒋焕煜,武传宇. 基于贪心算法的温室钵苗稀植移栽路径优化[J]. 农业机械学报,2016,47(3):8-13.Tong Junhua, Jiang Huanyu, Wu Chuanyu. Optimization of seedlings lower density transplanting path based on greedy algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 8-13. (in Chinese with English abstract)
[26] 张敏,冯江,宫成宇,等. 全自动旱田移栽机顶出机构的机理分析[J]. 农机化研究,2014,36(3):85-89.Zhang Min, Feng Jiang, Gong Chengyu, et al. Analysis on ejector seedlings mechanism of automatic dry farmland transplanting machine[J]. Jourmal of Agricultural Mechanization on Research, 2014, 36(3): 85-89. (in Chinese with English abstract)
[27] 韩长杰,郭辉,张学军,等. 硬质穴盘苗自动取苗装置设计[J]. 农业工程,2013,3(4):99-102.Han Changjie, Guo Hui, Zhang Xuejun, et al. Design of automatic hard-plug-seedlings pick device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 3(4): 99-102. (in Chinese with English abstract)
[28] 俞高红,陈志威,赵匀,等. 椭圆-不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J]. 机械工程学报,2012,48(13):32-39.Yu Gaohong, Chen Zhiwei, Zhao Yun, et al. Study on vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear[J].Journal of Mechanical Engineering, 2012, 48(13): 32-39.(in Chinese with English abstract)
[29] 叶秉良,李丽,俞高红,等. 蔬菜钵苗旋转式取苗机构动力学分析与试验[J]. 农业机械学报,2014,45(6):70-78.Ye Bingliang, Li Li, Yu Gaohong, et al. Dynamics analysis and test of rotary pick-up mechanism for vegetable pot-seedling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 70-78. (in Chinese with English abstract)
[30] 韩绿化,毛罕平,严蕾,等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J]. 农业机械学报,2015,46(7):23-30.Han Lühua, Mao Hanping, Yan Lei, et al. Pincette-type end-effect using two fingers and four pins for picking up seedings[J]. Ransaction of Chinese Society for Agricultural Machinery, 2015, 46(7): 23-30. (in Chinese with English abstract)
[31] 韩绿化,毛罕平,缪小花,等. 基于穴盘苗力学特性的自动取苗末端执行器设计[J]. 农业机械学报,2013,44(11):260-265.Han Lühua, Mao Hanping, Miao Xiaohua, et al. Design of Automatic Picking Up Seedling End-effector Based on Mechanical Properties of Plug Seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11):260-265. (in Chinese with English abstract)
[32] Ting K C, Giacomelli G A, Shen S J, et al. Robot workcell for transplanting of seedlings. Part Ⅱ: End-effector development[J]. Transactions of the ASAE, 1990, 33(3):1013-1017.
[33] 肖玺泽,王永维,王俊,等. 穴盘苗子叶期包裹式补苗专用机械爪及补苗方法:201610709136.9[P]. 2017-02-01.
[34] 桂跃,付坚,侯英杰,等. 高分解度泥炭土直剪抗剪强度特性及机理[J]. 河海大学学报(自然科学版),2016,44(5):418-426.Gui Yue, Fu Jian, Hou Yingjie, et al. Sheat strength properties and mechanisms of peaty soil with high degree of decomposition in direct shear tests[J]. Journal of Hohai University(Natural Sciences), 2016, 44(5): 418-426. (in Chinese with English abstract)
[35] 梁喜凤,蔡阳阳,王永维. 番茄钵苗自动移栽钵体物理机械特性试验[J]. 浙江大学学报(农业与生命科学版),2015,41(5):616-622.Liang Xifeng, Cai Yangyang, Wang Yongwei. Experiment on physical and mechanical properties of tomato seedling pot for automatic vegetable transplanter[J]. Journal of Zhejiang University (Agric & Life Sci), 2015, 41(5): 616-622. (in Chinese with English abstract)
[36] 童俊华,蒋焕煜,蒋卓华,等. 钵苗自动移栽机器人抓取指针夹持苗坨参数优化试验[J]. 农业工程学报,2014,30(16):8-16.Tong Junhua, Jiang Huanyu, Jiang Zhuohua, et al. Experiment on parameter optimization of gripper needles clamping seedling plug for automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2014, 30(16): 8-16. (in Chinese with English abstract)
[37] 梁志卿,赵瑞,孙吉娜,等. 基质中不同比例珍珠岩的添加对番茄穴盘苗的矮化效应[J]. 东北农业大学学报,2011,42(4):72-76.Liang Zhiqing, Zhao Rui, Sun Jina, et al. Dwarf effects of adding in different ratios’ perlite on tomato plug seedling[J].Journal of Northeast Agricultural University, 2011, 42(4):72-76. (in Chinese with English abstract)