大视场星光修正惯性导航半实物仿真系统设计
2018-05-19刘百奇刘建设
刘百奇 刘建设 吕 艳
1.中国运载火箭技术研究院研究发展中心,北京100076 2. 空间物理重点实验室, 北京 100076
星光修正惯性导航技术是一种利用星光定姿信息修正惯性导航累积误差的导航技术,可提高飞行器的导航精度。为验证星光修正惯性导航的能力,需要进行多种工况实验分析验证。然而实际的飞行实验成本高、可重复性差、数据采集周期长,不适合初期的实验研究。半实物仿真将物理仿真与数学模型结合起来,可以降低实验成本,节约时间,同时具有接近真实实验的验证效果,是一种良好的实验验证手段。因此,国内外针对半实物仿真做了大量研究。
美国NASA在飞行器编队飞行导航的问题上采用了半实物仿真的验证方法[1-2]。国内,李涛等人提出了一种惯性导航系统的半实物仿真方案,对传递对准进行了半实物仿真[3]。范世鹏等人以及单家元等分别对激光制导武器的半实物仿真系统做了分析与设计实现[4],并应用在了某型导弹的半实物仿真实验中[5]。陈志等人针对某导弹的半实物仿真测试系统进行了微型化、通用化的研究[6]。张翔等人提出了一种用于导弹批验收的半实物仿真方法[7]。全伟等人研究了小视场星光修正惯性导航,提出了一种SINS/CNS组合导航的半实物仿真系统,并进行了初步的实验研究[8],徐帆等人在此基础上进一步开展了SINS/CNS/GPS组合导航的半实物仿真研究[9]。
本文针对快速发射固体运载火箭采用大视场星光修正惯性导航系统的需求,设计了一种高精度、实时性强的星光修正惯性导航半实物仿真系统。应用该系统可以方便地进行算法调试和系统性能测试。这对于加快星光修正惯性导航系统的研发速度、提高效率及降低成本具有一定的工程实践意义。
1 总体方案
大视场星光修正惯性导航的基本原理是利用大视场星敏感器确定载体姿态,并以此精确姿态作为量测信息修正惯导误差。其半实物仿真系统主要由轨迹发生器子系统、高精度星图模拟子系统、恒星敏感器集成定姿子系统、捷联惯性导航子系统和星光修正惯性组合导航子系统组成。星光修正惯性导航采用全捷联模式,具有结构简单、尺寸小、重量轻、成本低、可靠性高和光轴调校精度高等特点,整体方案如图1所示。

图1 大视场星光修正惯性导航总体方案
轨迹发生器模拟载体运动信息,结合设定的星敏感器安装矩阵,产生星敏感器光轴指向信息,传输给星图模拟子系统。星图模拟子系统根据光轴指向,结合基本星表,通过高精度的星图模拟程序,生成对应于光轴指向的星图;再经过平行光管的作用,使得最终输出的星图为平行光,便于星敏感器镜头观测星图。星敏感器镜头拍摄到星图,经过去噪、畸变校正和质心提取等过程获得清晰的星点,再使用三角形匹配识别算法识别出最佳导航星;进一步,星敏感器集成定姿子系统将计算出当前的姿态信息,通过422串口通信的方式传输到组合导航专用计算机中。与此同时,惯性测量单元(IMU)敏感到地球自转角速度。将IMU输出的真实数据经过数据平滑等处理后减去地球自转角速度这一常值就可以得出IMU的真实器件误差信息。将该误差与轨迹发生器生成的标称陀螺仪、加速度数据相加就可以模拟飞行中的陀螺仪和加速度计数据,并通过串口通信的方式输送到组合导航专用计算机中。惯性器件测量数据即陀螺仪测得角速率和加速度计测得的加速度数据,结合星敏感器集成定姿子系统提供的姿态信息,使用先进滤波算法进行组合导航和星光修正惯性导航误差的操作。
利用该系统可以有效地实现星光修正惯性导航技术的半实物仿真,为分析算法性能和系统功能提供了经济实用的实验方法。
2 系统设计与实现
星光修正惯性导航半实物仿真系统由硬件部分和软件部分组成,在设计中本着经济、可操作性强、模拟程度高及可移植性好等原则和硬件模块化、软件流程一体化设计了该系统。
2.1 系统硬件设计
半实物仿真系统的硬件部分主要包括轨迹发生器计算机、星图模拟计算机、高精度星图模拟仪、星敏感器(含集成定姿系统,下同)、IMU和组合导航专用计算机。其中,轨迹发生器可以在实验前生成模拟轨迹数据存储到星图模拟计算机和组合导航计算机等需要的设备中,以便于节省一台计算机,降低成本、提高效率。从信息的流向看,可以将硬件系统分为姿态信息获取与传递通道和惯性信息测量与传递通道。通过软件同步方式同步各部件信息。
2.1.1 姿态信息的获取与传递通路
姿态信息的获取与传递通路包括轨迹发生器、星图模拟计算机、星图模拟仪和星敏感器等部件。星图模拟计算机根据轨迹发生器提供的运动数据产生星图信息,而星图模拟仪将图像信息转化为平行光,它们之间通过VGA视频线实现数据传递。星图模拟仪与星敏感器之间信息传递的载体是光信号:星图模拟仪发出平行光,星敏感器敏感平行光。星敏感器产生的姿态信息通过串口通信数据线传输到组合导航专用计算机。
2.1.2 惯性信息测量通路
惯性信息测量通路包括IMU、轨迹发生器等。轨迹发生器生成的陀螺仪数据和加速度计数据通过串口传输到组合导航专用计算机中;如果没用专用的轨迹发生器计算机,可以将轨迹发生器的数据存储在组合导航计算机中。IMU有专用的航空接头与组合导航计算机连接。
2.2 系统软件设计
2.2.1 软件设计方案
软件是整个系统的核心,合理的软件设计可以降低对硬件的要求,提高系统运行效率。软件设计要从实现系统功能出发。星光修正惯性导航半实物仿真系统的整体功能框图如图2所示。
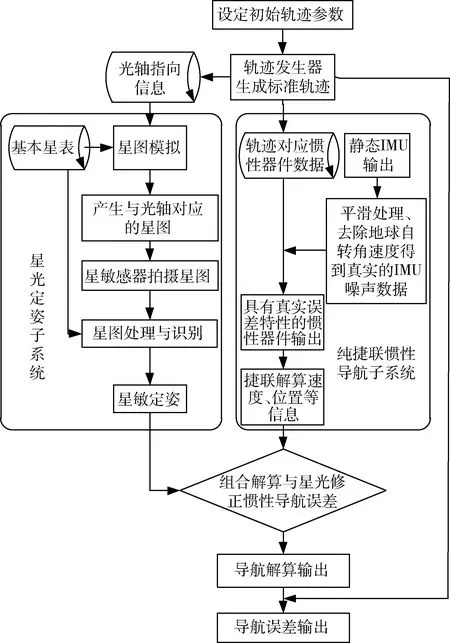
图2 星光修正惯性导航半实物仿真系统功能实现框图
星光修正惯性组合导航半实物仿真系统功能具体实现为初始化轨迹发生器参数,根据轨迹参数生成各子系统标称轨迹数据。一方面,标称轨迹数据结合星敏感器安装矩阵可以计算出星敏感器光轴的指向信息。星敏感器光轴指向信息传递到星图模拟子系统,根据星表和星历产生特定视场的模拟星图图像。星敏感器集成定姿系统处理拍摄到的星图,并进行星图匹配识别进而得出姿态信息。另一方面,接收实时的IMU输出数据,去除静态IMU的标称输出值后叠加到轨迹发生器生成的标称数据上,将其作为具有真实误差特性的惯性器件输出数据,通过捷联解算求解出速度、位置和姿态。
建立ESP师资团队还可以从教师入口和鼓励团队合作入手。在引进新教师时有侧重地倾向选择专业背景多元的外语人才,有助于实现外语教师的专业多元化。二是鼓励专业教师与英语教师合作教学,与专业教师一起共同探索某一个领域的语篇结构和修辞手法,共同构建一门专业英语课程。
星光修正惯性组合导航计算机接收惯性、星光导航子系统的输出数据,根据组合逻辑对信号进行时间同步预处理,并完成组合滤波以及星光修正惯性导航误差。
2.2.2 软件编写流程
为实现星光修正惯性导航半实物仿真系统功能,按照如图3所示的流程编写星光修正惯性导航半实物仿真系统的软件部分。

图3 星光修正惯性导航半实物仿真算法流程图
程序初始化后判断惯性器件数据是否可用,如果读取到惯性器件数据则进行下一步,否则等待读取惯性器件数据。
读取到正确的惯性器件误差后判断系统当前工作模式:纯捷联惯性导航模式下,将运行捷联惯性导航算法模块进行纯捷联惯性导航解算,得出姿态、速度和位置等信息,然后判断是否满足导航解算结束条件,如果满足则结束,否则重复以上步骤;组合导航模式下将接收星敏感器输出的姿态信息,运行卡尔曼滤波程序和捷联惯性导航程序进行组合导航解算,并反馈校正惯性导航信息。
反馈校正后依次判断平台失准角、陀螺漂移和加速度计零偏估计情况,根据状态量的估计情况判断是否修正其引起的导航累积误差。
2.3 系统实现
根据系统的总体设计思想及各部分软硬件构成,星光修正惯性导航半实物仿真系统实现如图4所示。
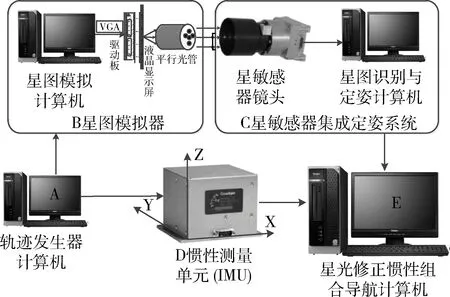
图4 星光修正惯性导航技术半实物仿真系统总体结构图
计算机A是轨迹发生器,利用轨迹发生器软件模拟飞行轨迹数据,为星光修正惯性组合导航半实物仿真系统提供统一的标准轨迹数据。
设备B是高精度的星图模拟子系统,根据轨迹发生器数据和星敏感器安装矩阵生成飞行过程中恒星敏感器观测到的星图,并通过平行光管等器件产生平行光输出。星图模拟子系统是一种为测试星敏感器功能和验证星图识别算法性能,提供仿真星图数据的仿真系统,主要包括星图模拟计算机、分频器、显示设备、光源系统、液晶显示系统和平行光管6部分,其中星图模拟计算机中装有星图模拟算法和基本星表。星图模拟仪如图5所示。

图5 大视场星图模拟仪
设备C是星敏感器集成定姿子系统,包络星敏感器镜头和定姿处理计算机;它通过星敏感器观测到导航星,经过高精度的星图处理和天文定姿技术得到精确的姿态信息。使用的星敏感器其视场大小为14°×14°,可以敏感6等及以上恒星,最高输出频率可达40Hz。
设备D是惯性导航子系统,根据轨迹发生器的数据和惯性测量单元(IMU)的信息进行捷联惯性导航解算,得到初步的导航信息。所用的IMU陀螺仪漂移为0.05(°)/h,加速度计为20ug,数据输出频率为100Hz,如图6所示。
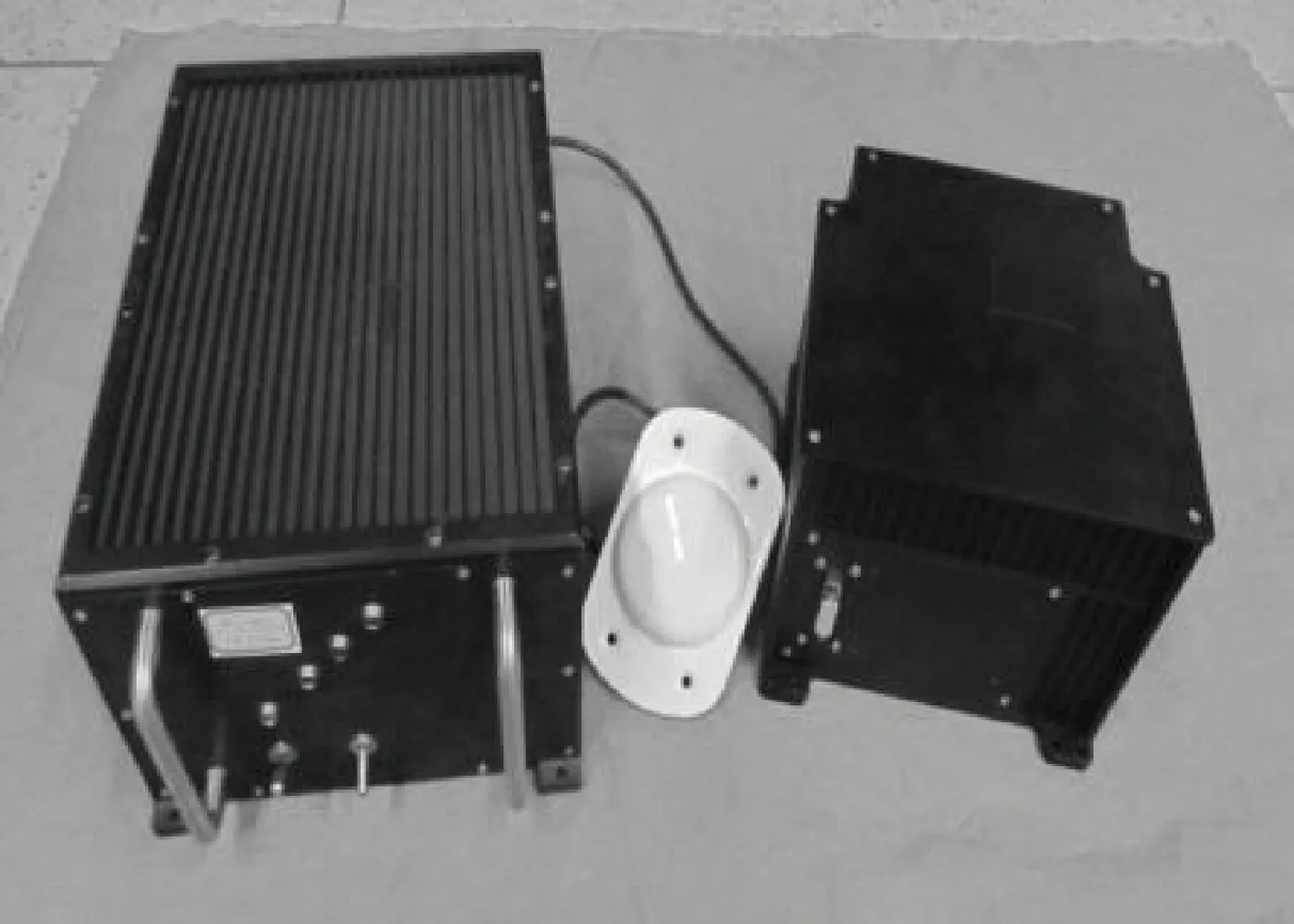
图6 IMU
计算机E是星光修正惯性组合导航子系统,它接受来自集成定姿子系统的姿态信息和惯性导航系统提供的导航信息进行组合导航解算并完成星光修正惯性导航累积误差的工作。图7是E上搭载的星光修正惯性导航半实物仿真软件。

图7 星光修正惯性导航半实物仿真软件
3 半实物仿真实验与分析
基于图8所示的大视场星光修正惯性导航半实物仿真系统进行了半实物仿真实验,从纯捷联惯性导航与星光修正惯性导航误差比较的角度验证了系统性能,并分析了陀螺漂移大小和星敏感器定姿精度对星光修正惯性导航误差的影响。图8是搭建的半实物仿真实验系统实物图。

图8 大视场星光修正惯性导航半实物仿真系统
基于本文设计并实现的半实物仿真系统,开展了大视场星光修正惯性导航系统方法的验证。在验证大视场星光修正惯性导航姿态误差方法的同时,也验证了利用状态转移矩阵修正主动段惯导累积的位置和速度误差的方法。
3.1 系统验证实验条件
半实物仿真系统性能验证实验条件如表1所示。
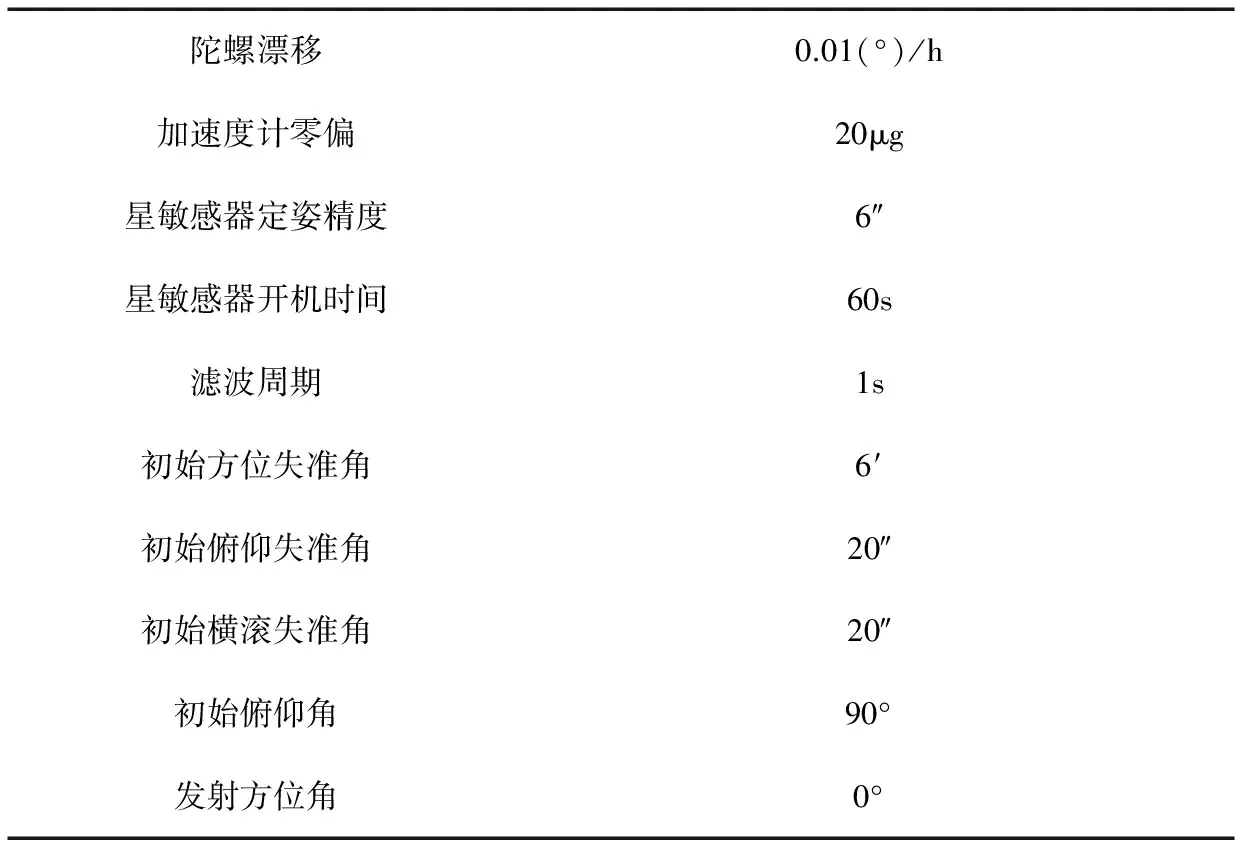
表1 半实物仿真系统性能验证实验条件
3.2 验证的状态转移矩阵修正方法



(1)


3.3 系统验证实验结果与分析
通过半实物仿真系统验证实验,大视场星光修正惯性系统姿态误差、速度误差和位置误差的结果如图9~11。
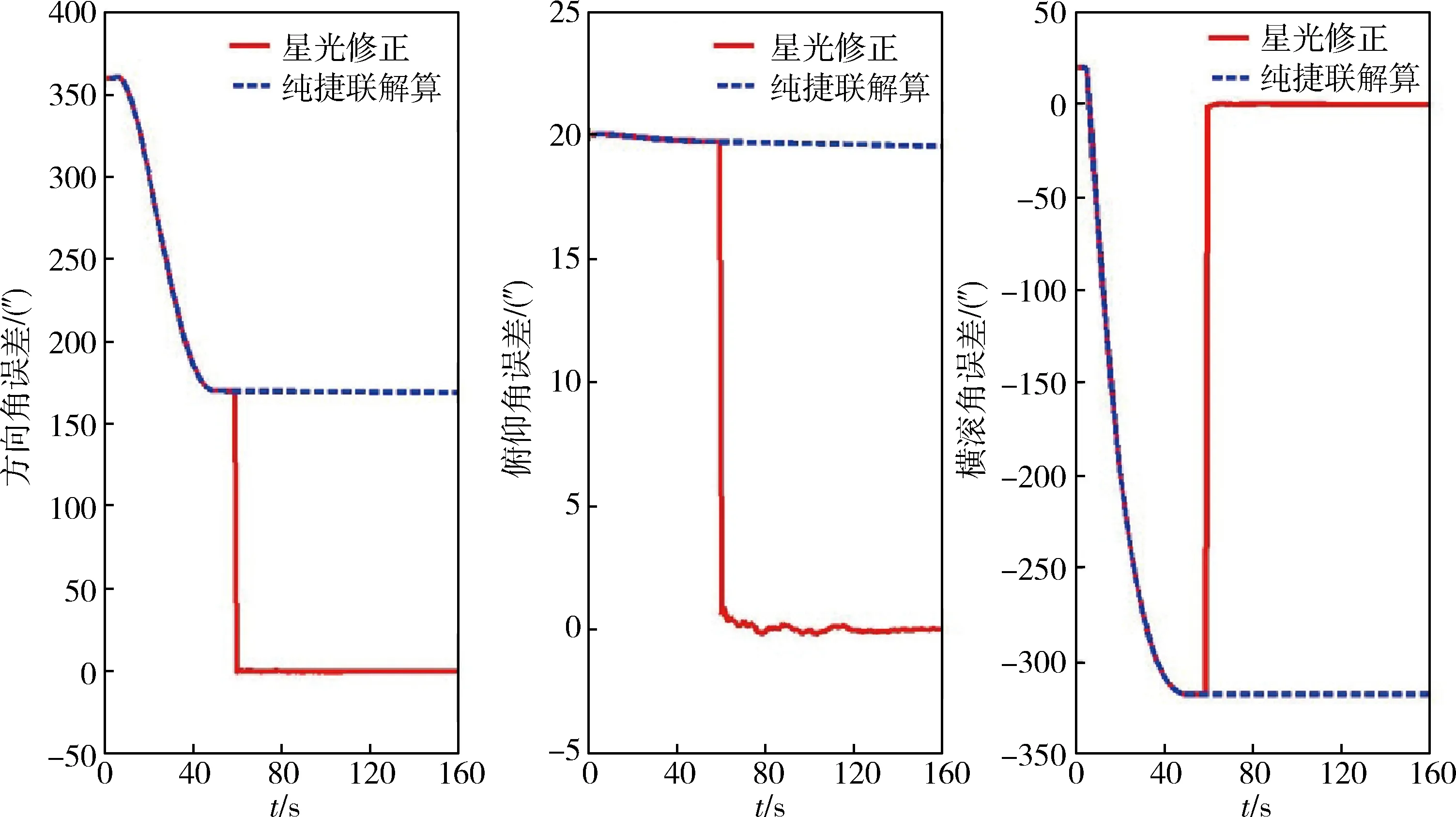
图9 大视场星光修正惯性系统姿态误差结果

图10 大视场星光修正惯性系统速度误差结果

图11 大视场星光修正惯性系统位置误差结果
表2~4给出了大视场星光修正惯性导航半实物仿真实验的统计结果。
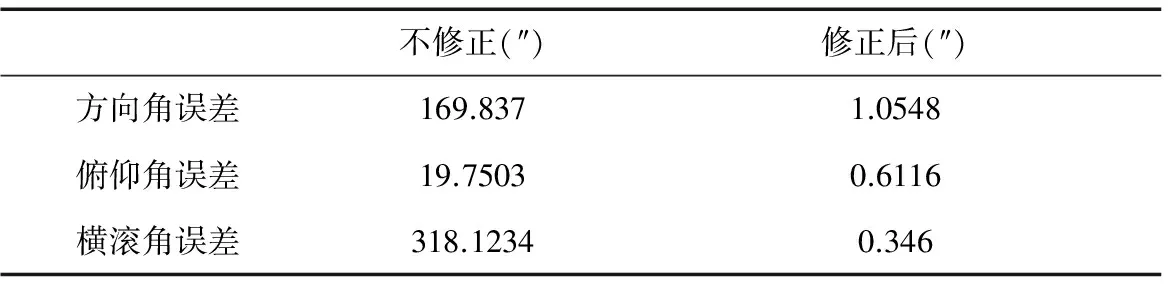
表2 大视场星光修正惯性系统姿态误差结果统计表
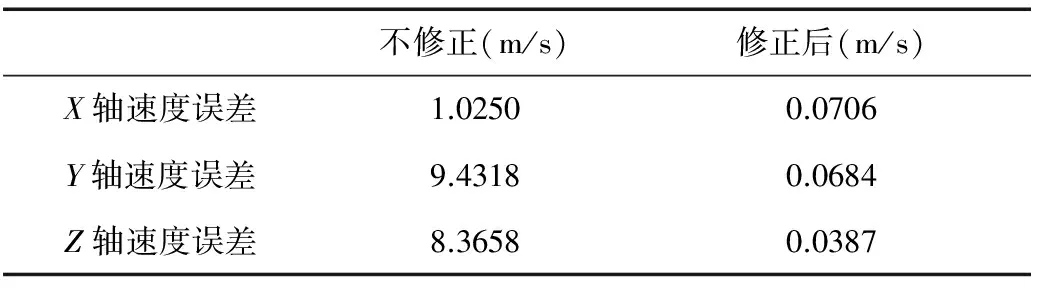
表3 大视场星光修正惯性系统速度误差结果统计表
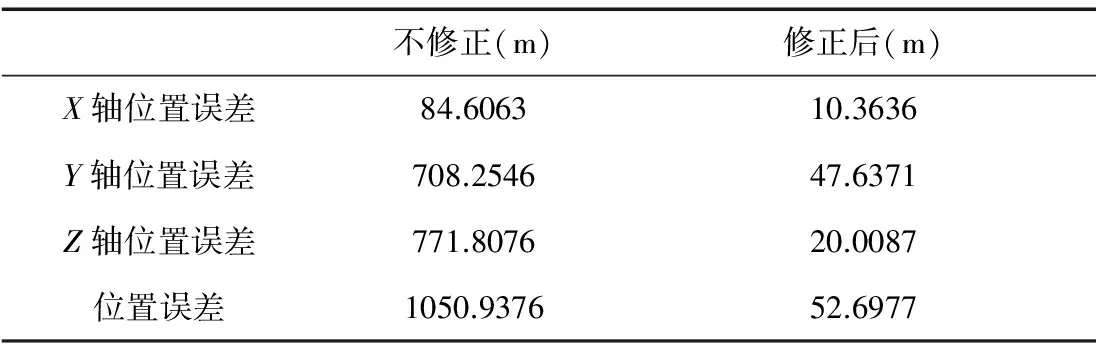
表4 大视场星光修正惯性系统位置误差结果统计表
根据以上半实物仿真实验结果表明,大视场星光可以有效降低惯性导航累积的误差。星光修正惯性导航半实物仿真系统验证实验的结果符合预期,满足设计要求,能够为星光修正惯性导航技术的验证与进一步工程应用研究奠定基础。
4 结论
大视场星光修正惯性导航半实物仿真系统的成功搭建,为在室内研究大视场星光修正惯性导航性能提供了更加贴近实际情况的验证手段。本系统在搭建时充分考虑了实际器件的误差特性,采用真实星敏感器和IMU采集器件误差数据,提高了系统仿真程度。
实验证明,所设计的半实物仿真系统能够有效进行大视场星光修正惯性导航的半实物仿真研究。该半实物仿真系统在软件上可以设定不同的陀螺漂移、加速度计零偏和星敏感器等器件误差和滤波周期等算法参数,可以有效分析上述参数对星光修正惯性导航技术的影响。所设计的半实物仿真系统经济实用、仿真精度高,实验数据可以为实际工程应用提供先行验证,有利于加快星光修正惯性导航系统的研发速度,提高效率。
参 考 文 献
[1] Williamson W, Rios T, Speyer J L. Carrier Phase Differential GPS/INS Positioning for Formation Flight[C]. Proceedings of 1999 IEEE American Control Conference, 1999, 5: 3665-3670.
[2] Hunt C, Smith C, Hart R, et al. Development of a Crosslink Channel Simulator[C]. Proceedings of 2004 IEEE Aerospace Conference, 2004, 2: 1322-1328.
[3] 李涛, 李兴玮. 一种新的惯性导航系统半实物仿真方案[J]. 计算机仿真, 2005, 22(1): 55-57. (Li Tao, Li Xingwei. A New Hardware-in-the-loop Simulation Scheme of Inertial Navigation System[J]. Computer Simulation, 2005, 22(1):55-57.)
[4] 范世鹏, 林德福, 路宇龙, 等. 激光制导武器半实物仿真系统的设计与实现[J]. 红外与激光工程, 2014, 43(2): 394-397. (Fan Shipeng, Lin Defu, Lu Yulong et al. Design and Achievement of Hardware-in-the-loop Simulation System for Guided Shell Based on Laser Semi-Active Seeker[J]. Infrared and Laser Engineering, 2014, 43(2): 394-397.)
[5] 单家元, 刘藻珍, 李钟武, 等. 激光制导武器半实物仿真实验系统[J]. 计算机仿真, 2002, 19(2): 15-17. (Shan Jiayuan, Liu Zaozhen, Li Zhongwu, et al. The Hardware-in-the-loop Simulation System for The Guidance System Laser Guided Weapon[J]. Computer Simulation, 2002, 19(2): 15-17.)
[6] 陈志, 何玉珠. 某导弹半实物仿真测试系统微型化的研究[J]. 电子测量技术, 2014 (2): 13-16. (Chen Zhi, He Yuzhu. The Micronizing Research of Hardware-in-the-loop Simulation for a Missile Test System[J]. Electronic Measurement Technology, 2014 (2): 13-16.)
[7] 张翔, 刘满国, 王洋, 等. 基于半实物仿真的导弹批验收实验方法[J]. 南京航空航天大学学报, 2012, 44(2): 257-261. (Zhang Xiang, Liu Manguo, Wang Yang. Method for Missile Batch Acceptance Based on Hardware-in-the-loop Simulation[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012, 44(2): 257-261.)
[8] 全伟, 房建成. SINS/CNS 组合导航半实物仿真系统及其实验研究[J]. 系统仿真学报, 2007, 19(15): 3414-3418. (Quan Wei, Fang Jiancheng. Realization and Experimental Reserch for Hybrid Simulation System of SINS/CNS Integrated Navigation[J]. Journal of System Simulation, 2007, 19(15): 3414-3418.)
[9] 徐帆, 房建成, 全伟. SINS/CNS/GPS 组合导航系统半实物仿真研究[J]. 系统仿真学报, 2008, 20(2): 332-335. (Xu Fan, Fang Jiancheng, Quan Wei. Hardware-in-the-loop Simulation of SINS/CNS/GPS Integrated Navigation System[J]. Journal of System Simulation, 2008, 20(2): 332-335.)
