基于模糊不确定观测器的四旋翼飞行器自适应动态面轨迹跟踪控制
2018-05-15王宁王永
王宁 王永
近年来,随着科技发展及生产生活需要,四旋翼无人机吸引了人们越来越多的注意力.四旋翼无人机凭借对称结构,可以稳定地在空中悬停,并通过改变4个旋翼产生的升力在空中飞行,拥有优秀的机动性能,并且,其在救援、监测、森林防火等方面也有较为广泛应用,因此,四旋翼无人机是一种重要的垂直起降无人机系统,使得越来越多的人将研究方向转移到四旋翼飞行器的研究和控制中[1−6].
针对四旋翼飞行器的姿态和位置控制,研究人员提出了许多控制策略.常见的并在实际中应用的控制策略有PID 控制[7]、后推控制[8−10]和滑模控制[11−13]等.近年来,随着模糊控制及神经网络理论的发展,模糊控制和神经网络控制[14−16]在四旋翼控制器设计中也有越来越多的应用.实际上,由于四旋翼飞行器是一种四输入六输出的典型欠驱动系统,其控制器的设计拥有较大的难度.通过增加虚拟控制量、后推控制[17]和滑模控[18]可以使四旋翼飞行器获得较好的控制性能,同时,通过调节自适应参数或设计干扰观测器[19],后推控制和滑模控制也使得四旋翼飞行器拥有较强的抗干扰能力.然而,现有的多数控制策略很少考虑控制器设计过程中虚拟控制信号的复杂性和可导性问题[20].文献[21]通过设计滑模观测器,对飞行器外部扰动进行观测补偿,增强了控制系统的鲁棒性,但采用高阶滤波器的方法,使得控制器参数选择较为苛刻和复杂.文献[22]采用控制滤波积分后推的方法设计控制器,降低了后推控制中虚拟信号求导的复杂性,然而,却未考虑外界扰动对控制系统的影响.文献[23]将四旋翼飞行器系统分解为位置和姿态两个动态子系统,采用后推控制方法设计控制器,实现四旋翼飞行器轨迹跟踪控制,同时,该文在位置动态子系统中考虑了未知空气动力学扰动,并设计观测器对其进行估计,对四旋翼飞行器具有较好的控制效果,然而,该文并没有考虑系统不确定性对系统的影响,同时,也未对后推控制中虚拟控制量处理,使得虚拟变量的求导过程变得较为复杂.文献[24]通过直接自适应控制和量子逻辑,针对四旋翼飞行器执行器失效,设计控制策略,实现了四旋翼飞行器姿态控制,该文通过采用改进的模型参考自适应补偿控制器补偿执行器失效和外部扰动,进而保证四旋翼飞行器的姿态角跟踪参考系统的输出状态,同时,量子逻辑的引入,进一步增加了该方法的控制精度,然而,本文只是对外部扰动和执行器失效产生的不确定量的上界进行自适应估计补偿.文献[25]采用定量反馈理论建立了四旋翼飞行器的全动态参数模型,此外,设计了基于定量反馈理论(Quantitative feedback theory,QFT)和鲁棒控制的新型PID控制器,该文的仿真研究验证了控制方法的有效性,然而,对于外部扰动和模型不确定性,该文并没有做更多研究.实际上,同时处理外部扰动和虚拟控制信号的复杂性及可导性问题是比较困难的,文献[26]针对一类非线性系统,设计自组织神经网络扰动观测器补偿不匹配扰动对系统的影响,同时,针对虚拟控制信号的复杂性及可导性问题,该文献采用了动态面控制技术,避免对虚拟控制信号的直接求导,具有较好的控制效果.
本文针对四旋翼飞行控制系统中虚拟控制信号求导复杂的问题,采用了动态面控制的方法,实现四旋翼飞行器跟踪控制设计的迭代解耦.针对由未知外界扰动和系统不确定性组成的集总非线性,采用模糊不确定观测器对其逼近.不同于其他文章将四旋翼飞行器系统分解为平移运动和旋转运动,本文将四旋翼飞行器分解为位置、姿态和角速率三个动态子系统,分别设计期望的虚拟控制器,其优点在于解决了四旋翼飞行器欠驱动约束的同时,还降低了控制器设计难度.进而,采用一阶低通滤波器的动态面控制方法,对虚拟控制信号进行滤波处理,避免直接求导,同时保证控制信号的光滑性,减少实际应用中飞控的计算数据;本文还全面考虑了由外部扰动和系统不确定性组成的集总未知非线性,设计模糊不确定观测器对其进行逼近,并对控制器进行补偿,增强了控制器的鲁棒性,相较于其他文章仅考虑外部扰动或系统不确定性并对未知非线性做一系列假设有一定的进步.最终,基于Lyapunov理论,证明了所得闭环控制系统的稳定性,跟踪误差和其他系统信号的有界性.
1 四旋翼飞行器动态模型
如图1所示,本文研究的无人机是由固定在十字型框架上的电机(Q1,Q2,Q3,Q4)驱动的四旋翼无人机.分别以飞行器起始点和飞行器几何中心为原点定义惯性坐标系Ea=(ex,ey,ez)和机体坐标系Eb=(e1,e2,e3).向量 (x,y,z)和 (φ,θ,ψ)分别表示飞行器质点在惯性坐标系中的位置和在机体坐标系中的姿态.其中,φ表示飞行器绕e1轴转动产生的与水平面的夹角,本文称之为横滚角,θ表示飞行器绕e2轴转动产生的与水平面的夹角,称之为俯仰角,ψ表示飞行器绕机体e3轴转动产生的偏航角.进而,将四旋翼飞行器分解为位置,姿态和角速率三个动态子系统.
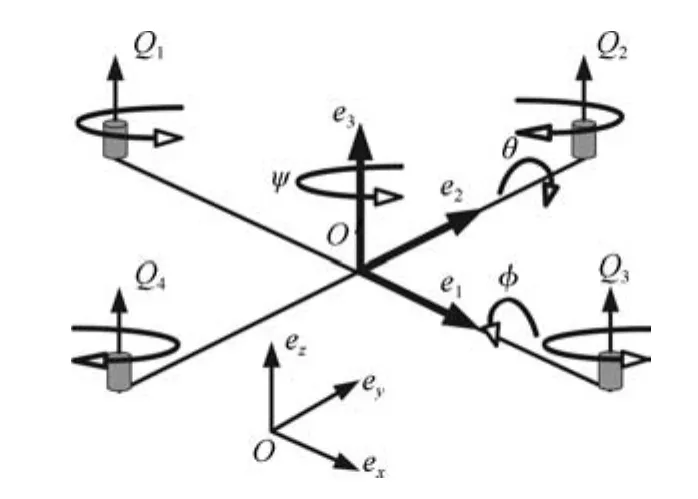
图1 四旋翼飞行器结构图Fig.1 The con figuration of a quadrotor
位置动态子系统描述如下:
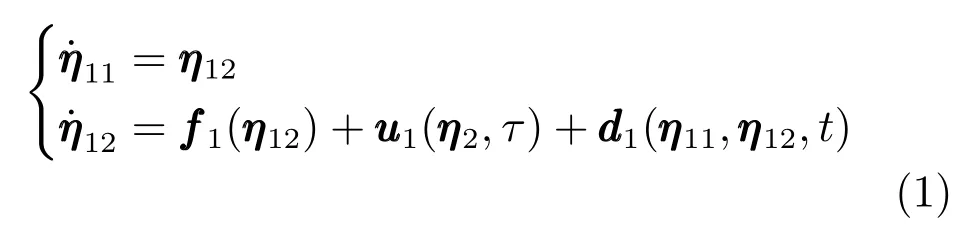
其中,为飞行器的位置向量,为飞行器在惯性坐标系中的线速率向量,表示由外部扰动和系统不确定性组成的集总未知非线性,并且
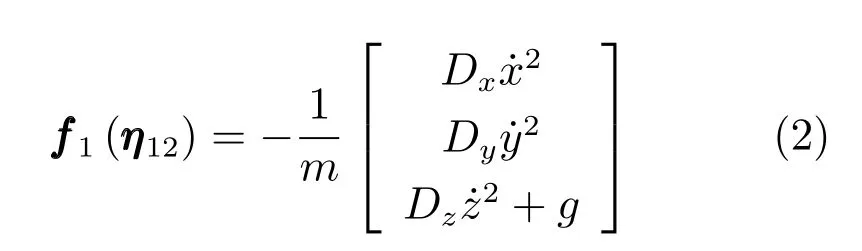
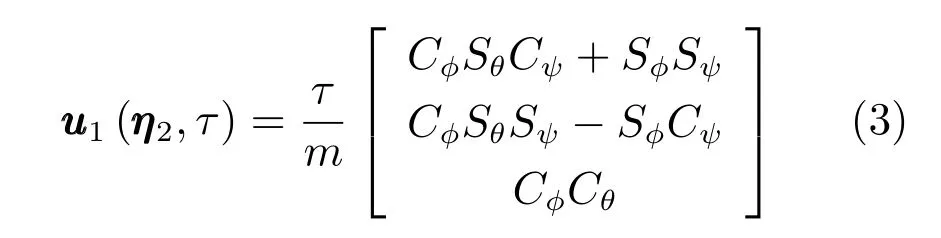
这里,Di(i=x,y,z)为空气阻尼系数,m为四旋翼飞行器的质量,g是重力加速度,C∗和S∗分别表示余弦函数 cos(∗) 和正弦函数 sin(∗),η2=[φ,θ,ψ]T为姿态向量,τ为4个旋翼产生的总拉力.
姿态角动态子系统为

其中,表示由外部扰动和系统不确定性组成的集总未知非线性,且
其中,T∗表示正切函数tan(∗),η3=[p,q,r]T为角速率向量.
角速率动态子系统表示为

其中,表示由外部扰动和系统不确定性组成的集总未知非线性,3=diag{1/Jx,1/Jy,1/Jz}为四旋翼飞行器的惯性矩阵,且
其中,为机体输入力矩向量,为本文研究的控制输入,则系统的总控制输入为
作如下一般性假设:
假设 1.期望轨迹η11d=[xd,yd,zd]T和ψd是连续可导的,即其导数存在且有界.
本文控制目标为:给定任意满足假设1的期望轨迹η11d和ψd,考虑具有外界扰动的四旋翼飞行器系统,结合动态面控制技术,设计一种基于模糊观测器的轨迹跟踪控制策略,使得四旋翼飞行器能够跟踪既定的期望轨迹,并且确保闭环控制系统稳定性和系统状态信号的有界性.
注1.本文考虑的系统不确定性是四旋翼飞行器参数测量或解算过程中产生的不确定量,其存在将直接影响系统稳定性和控制器的性能,本文对其处理,不仅与实际情况相符,更进一步提高了控制器的性能.
2 控制器设计
2.1 模糊逼近器
模糊系统由模糊器、模糊规则库、模糊推理机和解模糊器4部分组成.假设模糊系统由N条模糊规则组成,即:

其中,是模糊系统的输入变量,y是模糊系统的输出变量,确定的模糊集合.Bj是µBj(y)确定的模糊集合.如果采用中心平均解模糊器,乘积推理机和单值解模糊器的方法,则输出y(xxx)可以写为
其中,ϑ=[ϑ1,···,ϑN]T是模糊规则后件,由各个模糊规则后件部分隶属度函数中心确定.ξ()=[ξ1(),···,ξN()]T是模糊基函数定义如下:
由万能逼近定理可得,对于任意定义在一致紧集∈Rn上的连续函数υ()和任意ε>0,运用式 (10) 可得:成立.
2.2 位置控制器设计
考虑期望轨迹η11d:=[xd,yd,zd]T,结合位置动态子系统(1),定义如下误差向量:
则有
其中,η12d表示所设计的虚拟控制输入定义如下:

其中,并且,为η12d通过以下一阶低通滤波器的滤波输出

其中,τ1为滤波器滤波时间常数.
位置动态子系统的目标控制律设计如下:

其中,模糊未知非线性观测器为

模糊规则后件估计参数矩阵为

其中,r11>0和r12>0为设计参数,为模糊系统的控制输入向量,观测器误差向量定义为
其中,r13>0为设计参数.
2.3 姿态角控制器设计
结合式(20)和式(3),可得:
其中,ψd为给定偏航角轨迹,进而可得:

令期望姿态角η2d=[φd,θd,ψd]T,将其通过以下一阶低通滤波器

其中,为期望信号η2d的滤波输出,τ2为滤波器的滤波时间常数.
结合姿态角动态子系统(4),定义如下误差向量:
设计姿态角动态子系统的目标控制律如下:

其中,模糊未知非线性观测器为

模糊规则后件估计参数矩阵为

其中,r21>0和r22>0为设计参数,为模糊系统的控制输入向量,观测器误差向量定义为
其中,r23>0为设计参数.
2.4 角速率控制器设计
令期望角速率η3d:=[pd,qd,rd]T=2,将其通过以下一阶低通滤波器

其中,为参考轨迹η3d的滤波输出,τ3为滤波器的滤波时间常数.
结合角速率动态子系统(7),定义如下误差向量:

可得
设计角速率动态子系统的控制律如下:

其中,模糊未知非线性观测器为

模糊规则后件估计参数矩阵为

其中,r31>0和r32>0为设计参数,为模糊系统的控制输入向量,观测器误差向量定义为
其中,r33>0为设计参数.
因此,系统最终的控制律为
其中,τ和3分别由式(26)和式(43)定义.
注2.本文通过设计期望的虚拟控制输入最终解决了四旋翼飞行器系统欠驱动约束问题.此外,本文将四旋翼飞行器分解为位置、姿态角和角速率三个动态子系统,并分别设计期望的虚拟控制律,由于降低了子系统的阶数,从而降低了虚拟控制信号的复杂性.进而,为进一步降低对虚拟控制信号及其导数的光滑性限制,本文引入了一阶低通滤波器,实现了虚拟控制信号的滤波处理,用其滤波输出的导数代替虚拟控制信号的导数,不仅使虚拟控制信号变得光滑,而且还使得所设计控制方法并不依赖于滤波前虚拟控制信号的可导性,仅仅在理论分析时用到.与现有方法[19−23]相比,本文的方法不仅降低了控制器的设计难度,而且还具有更为理想的控制效果.
注3.针对未知外界扰动和系统不确定性组成的集总未知非线性,本文设计了模糊不确定观测器对其估计补偿.与传统的模糊扰动观测器仅仅对外部扰动估计补偿不同,本文设计的模糊不确定观测器不仅能有效地补偿如风等外部扰动对四旋翼飞行器的影响,还可以对系统建模及姿态解算等产生的系统不确定性进行估计补偿.
3 稳定性分析
定理1.考虑满足假设1的四旋翼飞行器轨迹跟踪系统(1)、(4)、(7),虚拟控制信号(20)和 (33),控制输入(26)、(43)、(48),模糊观测器(21)、(34)、(44)所组成的闭环控制系统,轨迹跟踪误差一致最终有界,且其他系统信号有界.
证明.结合式 (24)、(37)和 (47),对式(23)、(36)和(46)求导,可得:

其中,i=1,2,3.
最优参数表示为
其中,M ϑi和M ωi分别为ϑi和ωi的约束集.
则集总未知非线性表示为

其中,ζi(ωi)是重构误差向量,且| ζi(ωi)|<ζi,ζi>0.令结合式(49)可得:

考虑如下Lyapunov函数:
结合式 (15)、(16)、(31)、(41)和(52)可得式(53)对时间的导数为
将式(20)、(33)和(43)代入式(54)得:
由式(21)、(34)、(44)和式(51)可得:

将式(56)代入式(55)可得:
注意到以下等式成立:
结合式(22)、(35)和(45),可得:
其中,j=1,2,3.
将式(59)代入式(58)可得:
将式(60)代入式(55),可得:
结合式(17)、(19)、(28)、(32)、(38)和(42)得:
并且,由式(18)得:

因而可得:

其中,为连续有界函数.
其中,为连续有界函数.
由式(33)得:
结合式(62)第三个等式及上式得:
其中,为连续有界函数.
由式(64)、(65)和(67)可得:
此外,由Young′s不等式可得:
将式(68)和(69)代入式(61),可得:
选取设计参数满足如下不等式:
其中,α>0为任意常数.
则式(70)可整理为
结合式(24)和(71),可得:

显然,V(t)是有界的.并且,结合式(24),可知轨迹跟踪误差11和其他误差信号是一致最终有界的.实际上存在某一有限时间T>0,使得:
相应地,轨迹跟踪误差11是一致最终有界的,即:
通过选择合适的参数,使得误差上界任意小.
同样地,其他误差信号均有界.进而,结合误差动态系统(15)、(16)、(17)、(31)、(32)、(41)、(42),低通滤波动态(19)、(28)、(38)和外部扰动估计(21)、(34)、(44)及(52)可得系统信号均有界.□
4 仿真研究
为验证所提出控制方法的有效性,考虑具有外部扰动的四旋翼飞行器,其标称参数如表1所示.
此外,考虑以下集总未知非线性:
其中,i=1,2,3.
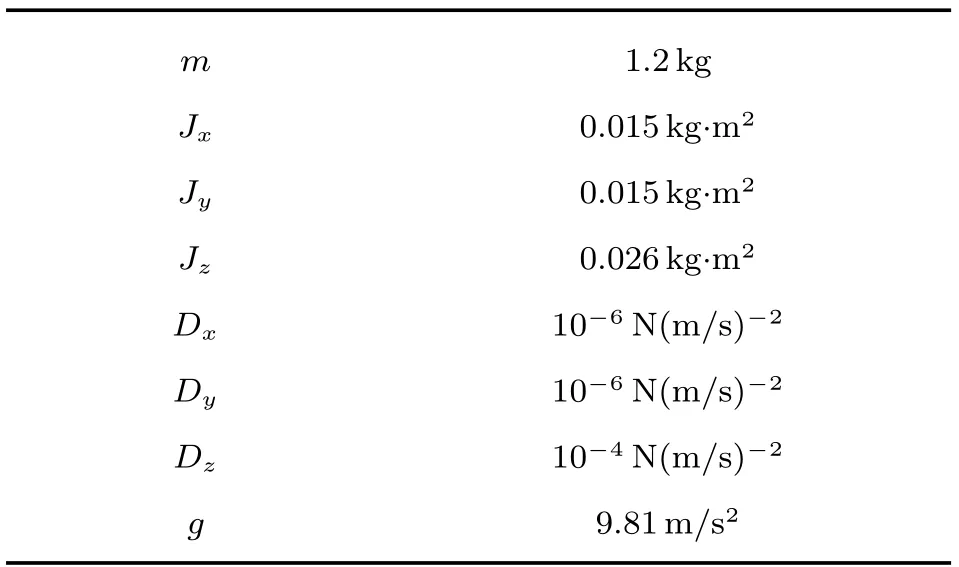
表1 四旋翼飞行器主要参数Table 1 The main parameters of the quadrotor
给定期望轨迹为
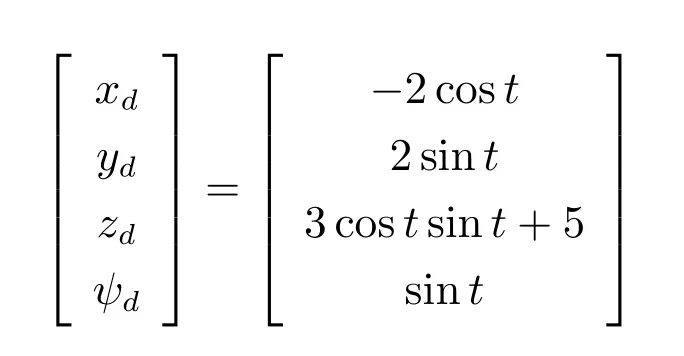
其中,初值为:x(0)=2,y(0)= −2,z(0)=2,ψ(0)=1.
控制器设计参数为:
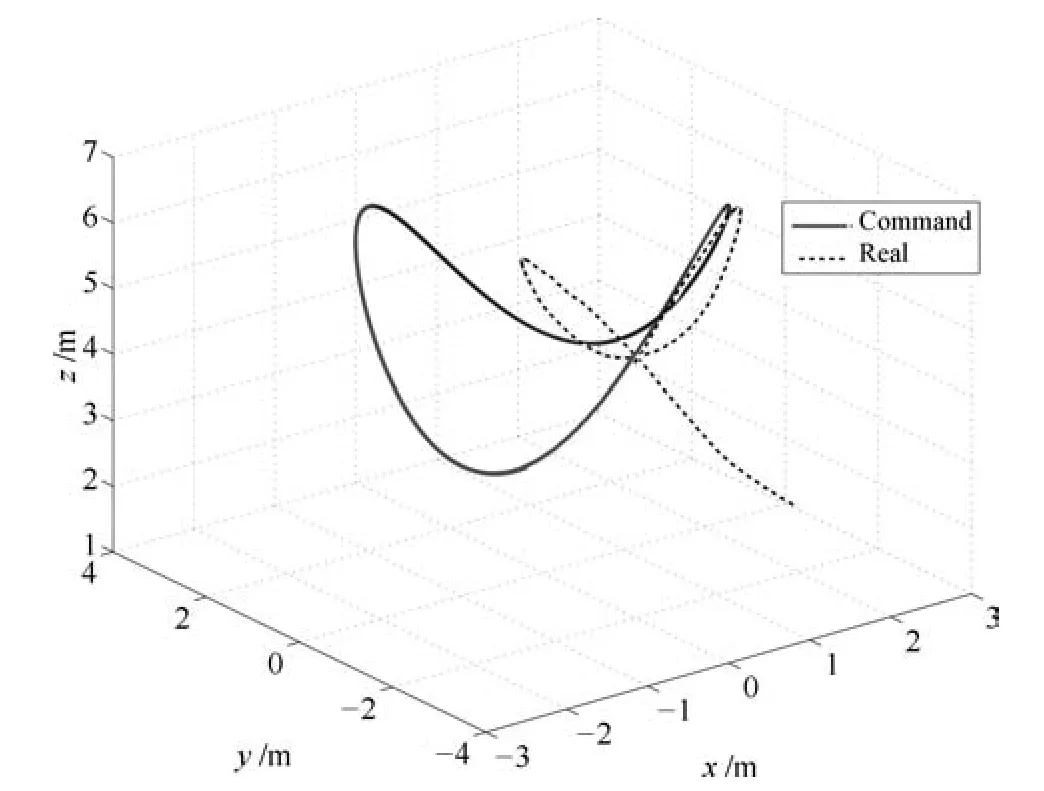
图2 空间轨迹跟踪Fig.2 Trajectory tracking
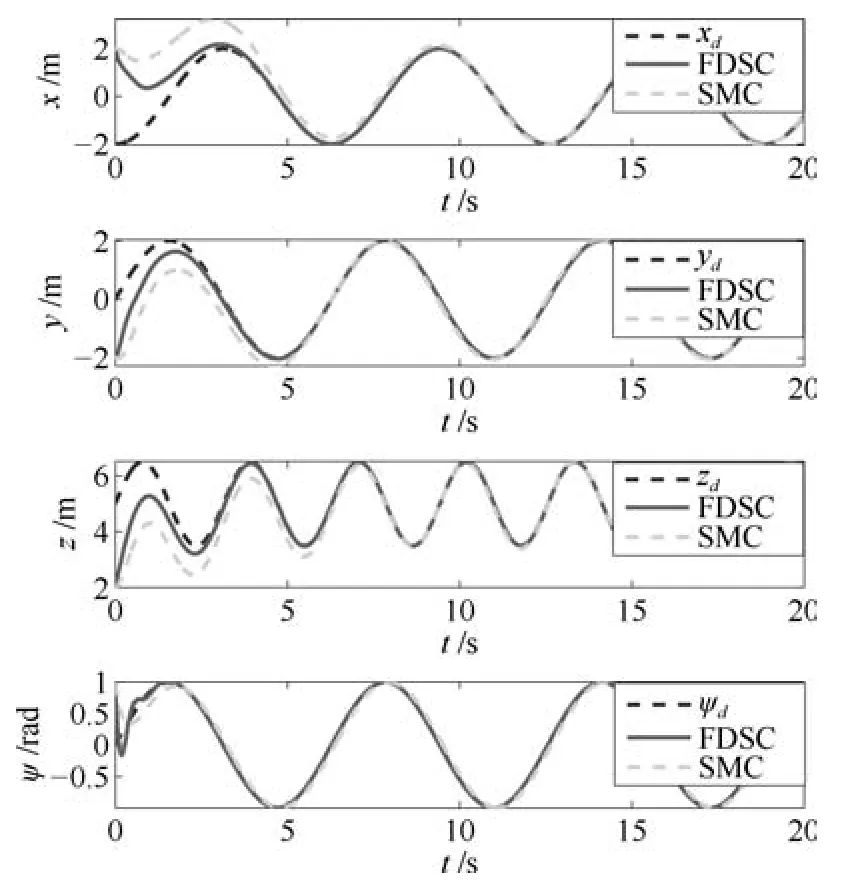
图3 x,y,z和ψ给定和实际状态Fig.3 Desired and actual states x,y,z and ψ
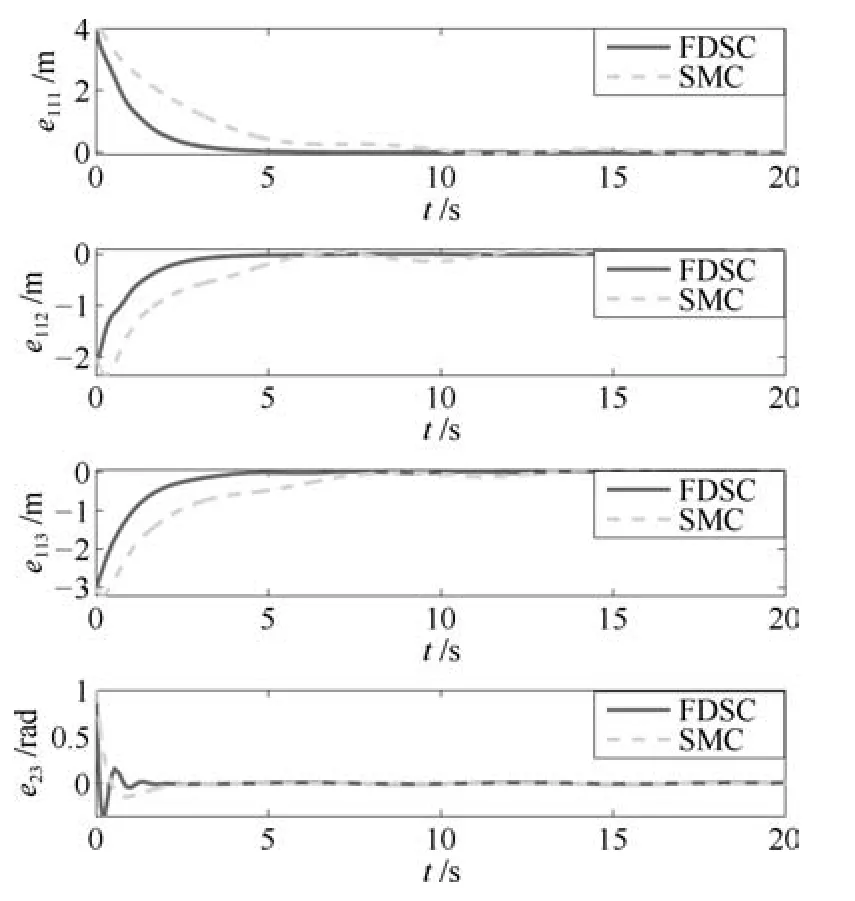
图4 跟踪误差Fig.4 The tracking errors
空间轨迹跟踪效果如图2所示,从图2中不难看出,本文所提出基于模糊观测器的四旋翼飞行器动态面控制策略,能够很好地跟踪期望轨迹.为了更好地说明本文提出控制算法的优越性,本文在仿真过程中加入本文提出的基于模糊观测器的动态面控制策略与当前应用广泛的滑模控制策略的对比,x,y,z三个方向和偏航角ψ的轨迹跟踪仿真结果如图3所示,其中,FDSC代表本文提出的控制策略,SMC代表滑模控制策略,由仿真图可以看出,在初始位置和参考起始点不同且参考轨迹随时间不断变化的情况下,在本文提出的控制策略下,四旋翼飞行器仍能够快速准确地跟踪参考轨迹,其明显能够比滑模控制更加迅速地使四旋翼飞行器到达跟踪轨迹且拥有更高的精度.图4给出了跟踪误差的变化,从图4中可以看出,在本文提出的控制策略下,仿真开始5秒以后,x,y,z三个方向的跟踪误差近乎为零,偏航角的跟踪误差约在2秒以后趋近零,而在滑模控制策略下,跟踪误差收敛速度明显要慢很多,且收敛精度更低,由此可见,所提出的控制策略能够更好地跟踪参考轨迹,同时,由图亦可看出,在飞行器到达参考轨迹的过程中,本文提出的控制策略下的跟踪误差变化较为平缓,并未出现抖动等不利于飞行器平稳飞行的情形.图5展示了仿真过程中控制输入的变化情况,由于仿真研究中给定的初值与飞行器起始点相距较远,此外还有外部扰动和系统不确定性的影响,因此,仿真图中控制输入曲线在初始会有较大的波动,当飞行器到达参考轨迹后,输入总拉力围绕飞行器重力不断变化且均值接近重力,其他三个控制力矩均在较小范围内变化.横滚角和俯仰角的变化如图6所示,由图6不难发现,飞行器跟踪参考轨迹飞行过程中,姿态不断调整变化,与四旋翼飞行器飞行机理一致.图7给出角速率的变化情况.图8展示了模糊观测器对施加在x,y,z三个方向和偏航角ψ上未知非线性的估计情况,从图8中我们可以看出,虽然施加的未知非线性随时间不断变化,但观测器能很快并较精确地估计出其变化,验证了所设计模糊观测器的有效性和准确性,从而使控制器能及时准确地针对集总未知非线性给予控制输入补偿,增强控制器的鲁棒性.由以上仿真结果可以看出,本文所提出的基于模糊观测器的四旋翼飞行器动态面控制策略,对四旋翼飞行器有很好的控制效果.
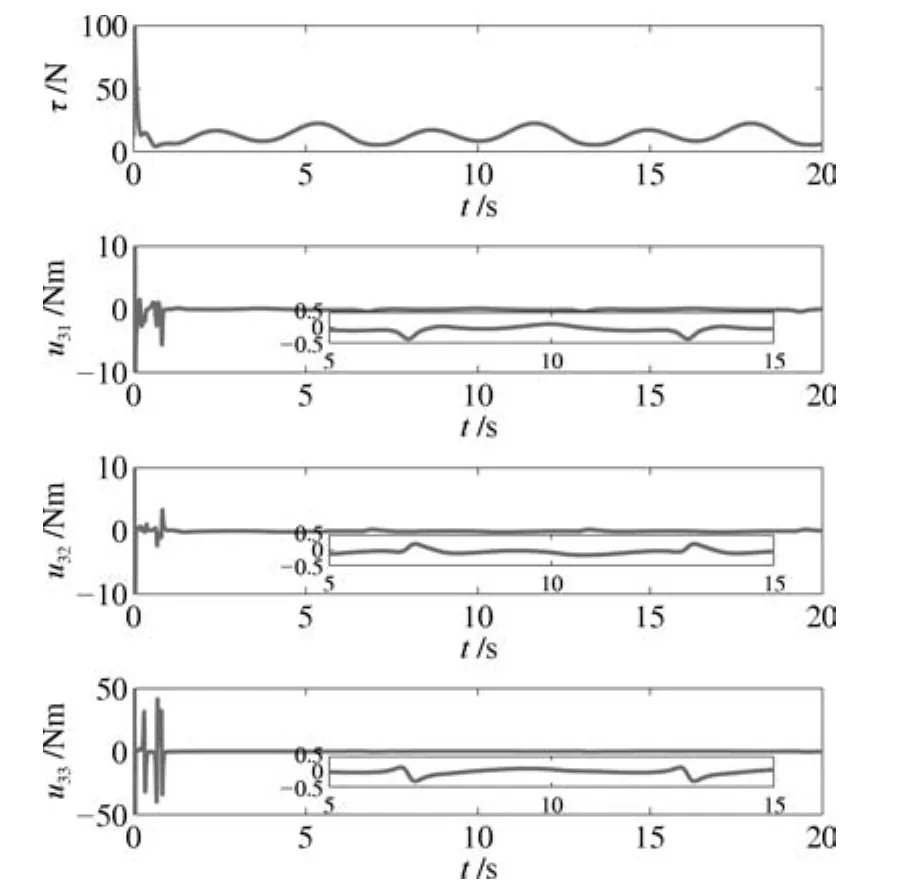
图5 控制输入Fig.5 Control inputs
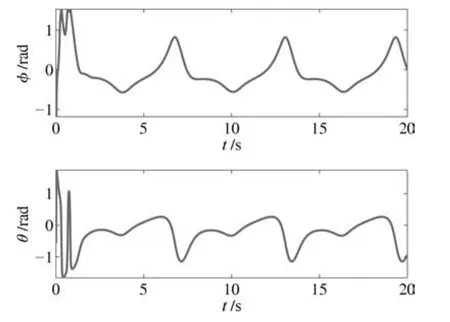
图6 横滚角φ和俯仰角θFig.6 Roll and pitch angles,i.e.,φ and θ
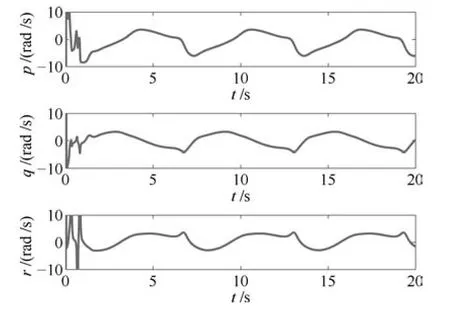
图7 角速率p,q和rFig.7 Angular velocities p,q and r
5 结论
针对具有未知外界扰动和系统不确定性的四旋翼飞行器,本文提出了一种基于模糊不确定观测器的动态面轨迹跟踪控制方法.具体地,将四旋翼飞行器系统分解为位置、姿态和角速率三个动态子系统,分别设计控制器,采用多环控制的方法解决了四旋翼飞行器欠驱动问题.采用动态面控制方法,设计一阶低通滤波器,避免对虚拟控制变量求导,实现了迭代设计的解耦.进而,采用模糊理论设计模糊不确定观测器,对由外部扰动和系统不确定性组成的集总未知非线性估计并补偿,增强了控制系统的鲁棒性.运用Lyapunov稳定性理论证明了四旋翼飞行器闭环控制系统的稳定性和跟踪误差及其他系统信号的有界性.最后,仿真研究验证了所提出的控制方法的有效性和优越性.
References
1 Driessens S,Pounds P.The triangular quadrotor:a more efficient quadrotor con figuration.IEEE Transactions on Robotics,2015,31(6):1517−1526
2 Wang Fei,Cui Jin-Qiang,Chen Ben-Mei,Lee T H.A comprehensive UAV indoor navigation system based on vision optical flow and laser FastSLAM.Acta Automatica Sinica,2013,39(11):1889−1900(王飞,崔金强,陈本美,李崇兴.一套完整的基于视觉光流和激光扫描测距的室内无人机导航系统.自动化学报,2013,39(11):1889−1900)
3 Elfeky M,Elshafei M,Saif A W A,Al-Malki M F.Quadrotor with tiltable rotors for manned applications.In:Proceedings of the 11th International Multi-Conference on Systems,Signals&Devices.Barcelona,Spain:IEEE,2014.1−5
4 Alexis K,Nikolakopoulos G,Tzes A.Model predictive quadrotor control:attitude,altitude and position experimental studies.IET Control Theory&Applications,2012,6(12):1812−1827
5 Li H Y,Wang J H,Shi P.Output-feedback based sliding mode control for fuzzy systems with actuator saturation.IEEE Transactions on Fuzzy Systems,2016,24(6):1282−1293
6 Cabecinhas D,Naldi R,Silvestre C,Cunha R,Marconi L.Robust landing and sliding maneuver hybrid controller for a quadrotor vehicle.IEEE Transactions on Control Systems Technology,2016,24(2):400−412
7 Zhu J C,Liu E D,Guo S,Xu C.A gradient optimization based PID tuning approach on quadrotor.In:Proceedings of the 27th Chinese Control and Decision Conference.Qingdao,China:IEEE,2015.1588−1593
8 Yacef F,Bouhali O,Hamerlain M.Adaptive fuzzy backstepping control for trajectory tracking of unmanned aerial quadrotor.In:Proceedings of the 2014 International Conference on Unmanned Aircraft Systems.Orlando,FL,USA:IEEE,2014.920−927
9 Basri M A M,Husain A R,Danapalasingam K A.Nonlinear control of an autonomous quadrotor unmanned aerial vehicle using backstepping controller optimized by particle swarm optimization.Journal of Engineering Science&Technology Review,2015,8(3):39−45
10 Dolatabadi S H,Yazdanpanah M J.MIMO sliding mode and backstepping control for a quadrotor UAV.In:Proceedings of the 23rd Iranian Conference on Electrical Engineering.Tehran,Iran:IEEE,2015.994−999
11 Runcharoon K,Srichatrapimuk V.Sliding mode control of quadrotor.In:Proceedings of the 2013 International Conference on Technological Advances in Electrical,Electronics and Computer Engineering(TAEECE).Konya,Turkey:IEEE,2013.552−557
12 Li S,Li B K,Geng Q B.Adaptive sliding mode control for quadrotor helicopters.In:Proceedings of the 33rd Chinese Control Conference.Nanjing,China:IEEE,2014.71−76
13 Chen F Y,Jiang R Q,Zhang K K,Jiang B,Tao G.Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV.IEEE Transactions on Industrial Electronics,2016,63(8):5044−5056
14 Gao H W,Liu C Y,Guo D L,Liu J G.Fuzzy adaptive PD control for quadrotor helicopter.In:Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation,Control,and Intelligent Systems(CYBER).Shenyang,China:IEEE,2015.281−286
15 Mao X,Zhang H B,Han D F.T-S fuzzy control for a quad-rotor UAV.In:Proceedings of the 34th Chinese Control Conference(CCC).Hangzhou,China:IEEE,2015.3617−3622
16 Benavidez P,Lambert J,Jaimes A,Jamshidi M.Landing of an Ardrone 2.0 quadcopter on a mobile base using fuzzy logic.In:Proceedings of the 2014 World Automation Congress(WAC).Waikoloa,HI,Qatar:IEEE,2014.803−812
17 Wang Ning,Wang Yong,Er Meng Joo,Adaptive dynamic surface trajectory tracking control of a quadrotor unmanned aerial vehicle.Control and Decision,2017,34(9):1185−1194(王宁,王永,余明裕.四旋翼飞行器自适应动态面轨迹跟踪控制.控制与决策,2017,34(9):1185−1194)
18 Zhou W D,Zhu P X,Wang C L,Chu M.Position and attitude tracking control for a quadrotor UAV based on terminal sliding mode control.In:Proceedings of the 34th Chinese Control Conference.Hangzhou,China:IEEE,2015.3398−3404
19 Modirrousta A,Khodabandeh M.Adaptive robust sliding mode controller design for full control of quadrotor with external disturbances.In:Proceedings of the 2nd RSI/ISM International Conference on Robotics and Mechatronics(ICRoM).Tehran,Iran:IEEE,2014.870−877
20 Zhang X,Xian B,Zhao B,Zhang Y.Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision.IEEE Transactions on Industrial Electronics,2015,62(10):6392−6403
21 Besnard L,Shtessel Y B,Landrum B.Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer.Journal of the Franklin Institute,2011,349(2):658−684
22 Rashad R,Aboudonia A,El-Badawy A.Backstepping trajectory tracking control of a quadrotor with disturbance rejection.In:Proceedings of the 25th International Conference on Information,Communication and Automation Technologies(ICAT).Sarajevo,Yugoslavia:IEEE,2015.1−7
23 Yang Y,Wu Q X,Chen M.Robust trajectory tracking control for a quadrotor unmanned aerial vehicle using disturbance observer.In:Proceedings of the 12th World Congress on Intelligent Control and Automation(WCICA).Guilin,China:IEEE,2016.697−702
24 Wang J,Du J K,Chen F Y,Jiang B,Tao G.Direct adaptive control scheme for a quadrotor helicopter with actuator failures via quantum logic.Journal of Aerospace Engineering,2016,29(5):Article No.04016026
25 Gharib M R,Moavenian M.Full dynamics and control of a quadrotor using quantitative feedback theory.International Journal of Numerical Modelling-Electronic Networks,Devices and Fields,2016,29(3):501−519
26 Sun H B,Hou L L,Li Y K.Disturbance observer based dynamic surface tracking control for a class of uncertain nonlinear systems with mismatched disturbances.In:Proceedings of the 12th World Congress on Intelligent Control and Automation(WCICA).Guilin,China:IEEE,2016.605−610
