复合自抗扰在三电机同步控制系统的应用
2018-05-14刘星桥丁网芳李慧
刘星桥 丁网芳 李慧
摘要关键词:自抗扰控制器;径向基函数;神经网络;参数;自调节
DOI:10.15938/j.emc.2018.02.000
中图分类号文献标志码:A文章编号:1007-449X(2018)02-0000-00
收稿日期基金项目作者简介:
通信作者:丁网芳A compound active disturbance rejection applied in the
threemotor synchronous control system
LIU Xingqiao1,DING Wangfang1,LI Hui1,2
(1.School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China;
2.Faculty of Electronic and Electrical Engineering, Huaiyin Institute of Technology, Huaian 223003, China)
Abstract:According to problems of complex algorithm, multiparameter and laborintensive and timeconsuming adjustment in the active disturbance rejection controller(ADRC), on the basis of optimizing the structure of ADRC, a compound ADRC based on radical basis function(RBF) neural network was designed. The controller obtained the online adjustment information of ADRC parameters by using RBF neural network to track the controlled object online, so that the parameters of the ADRC can be automatically adjusted. The method was applied in the threemotor synchronous control system which combined with S7300 PLC to build an experimental platform and adopts PLC programming language for algorithm implementation in order to perform experiments of the speed control. The results show that the method can achieve the selfadjusting function of partial parameters and can decrease overshoot to the lowest even realize speed regulation without overshoot. It can also improve the dynamic performance and steadystate accuracy of the system. The experimental results show that the method has practical application.
Keywords:active disturbance rejection controller; radical basis function; neural network; parameters; selfadjusting
0引言
隨着工业的飞速发展,单电机简单控制不能满足生产要求,多电机同步协调控制开始广泛应用于纺织、冶金、印刷等领域[1]。多电机同步既要满足电机转速控制要求,还要满足张力恒定且不受电机转速的影响,即张力与速度之间需进行解耦控制。自抗扰控制器(active disturbance rejection controller, ADRC)不依赖精确的模型结构和参数,可对系统的内扰和外扰进行估计、补偿和控制的特点被广泛应用于解耦控制系统中[2],如多电机同步控制系统[3]、制冷系统[4],并通过实验验证该控制器能有效解决变量间的解耦问题,与比例-积分-微分(proportion integration differentiation, PID)控制器相比,具有较强的抗干扰能力,提高了系统的鲁棒性与适应性。
ADRC优势众多,但算法复杂、参数多,虽部分参数可根据文献资料而得,但有些参数往往都是依靠经验试凑法,如误差反馈增益、补偿因子等,但经验试凑法费时费力,得到的数据不一定是最优,且控制系统扰动因素多,无法实现参数的实时调节。针对以上问题,提出了基于径向基函数(radical basis function, RBF)神经网络的复合ADRC,文献[5]将RBFADRC应用于在板球控制系统,文献[6]将其应用于海洋船舶方面,既可优化控制器参数,又提高控制器的性能。在优化ADRC的基础上,对于易影响系统的快速性、超调量以及稳定性的反馈控制律比例系数kp进行调节优化,利用RBF神经网络具有可实现任意复杂映射关系的能力[7],获得参数kp的在线调整信息,从而实现kp的实时自调节过程,增强系统的动态性能、稳定性以及自适应性能。
1三电机同步控制系统模型
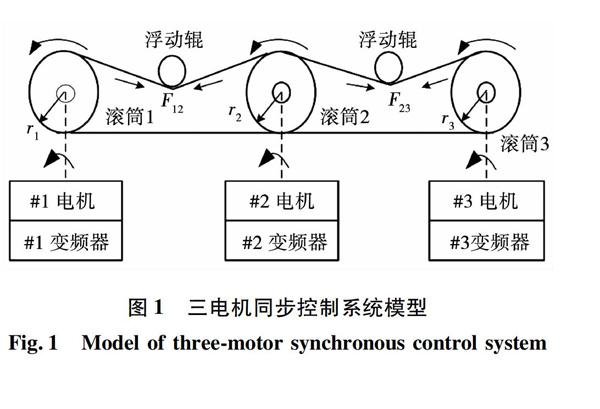
如图1所示为三电机控制系统模型。
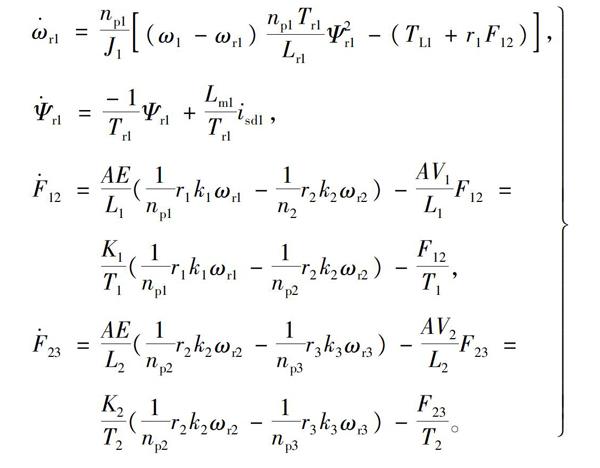
该控制系统选用主从控制方式,图1中,#1为主动电机,#2、#3为从动电机,各电机分别由一台变频器驱动,经过15∶1的减速机减速后驱动滚筒运转,3个滚筒由一条胶带相连,通过浮动辊的张紧作用产生胶带张力。着重以#1电机的速度控制为例,详细阐述基于RBF神经网络的ADRC实现参数自调功能。三电机变频同步系统中,采用矢量控制运行模式的变频器时,在d-q两相同步旋转坐标系下,忽略变频器的时滞,采用转子磁场定向控制的d-q旋转坐标系下简化后的主电机的速度算法以及根据胡克定律的张力算法[8]:
ω·r1=np1J1(ω1-ωr1)np1Tr1Lr1Ψ2r1-(TL1+r1F12),
Ψ·r1=-1Tr1Ψr1+Lm1Tr1isd1,
F·12=AEL1(1np1r1k1ωr1-1n2r2k2ωr2)-AV1L1F12=
K1T1(1np1r1k1ωr1-1np2r2k2ωr2)-F12T1,
F·23=AEL2(1np2r2k2ωr2-1np3r3k3ωr3)-AV2L2F23=
K2T2(1np2r2k2ωr2-1np3r3k3ωr3)-F23T2。(1)
式中:ω1为主电机同步旋转角速度;ωr1、ωr2、ωr3为转子电气角速度;Ψr1为转子磁链;J1为转动惯量;TL1为负载转矩;Tr1为电机时间常数;Lr1为转子电感;Lm1为转子和定子互感;np1、np2、np3为极对数;r1、r2、r3为胶带滚筒的半径;K1=E/V1、K2=E/V2为传递系数;T1=L1/AV1、T2=L2/AV2为张力变化常数;A为皮带的截面积;E为皮带的杨氏弹性模量;L1、L2分别为#1电机与#2电机、#2电机与#3电机机架间的距离;V1、V2为期望的速度;k1、k2、k3为第1、2、3台胶带滚筒的速比;F12为#1、#2电机间的张力;F23为#2、#3电机间的张力。下标1、2、3分别对应于#1电机、#2电机和#3电机。
从以上两个公式可以看出,#1号电机的转速ωr1、张力F12、张力F23三者之间存在着耦合关系,彼此之间相互影响,因而为了实现三电机同步控制,就必须实现#1号电机的转速ωr1、张力F12、张力F23之间的解耦。
2自抗扰控制器
2.1ADRC概述
所谓“自抗扰”就是要主动用控制信号消除从被控对象的输入输出信号中提取的扰动信息,这样可大大降低扰动对被控对象的影响,提高系统的稳定性和降低能耗[9],ADRC的思想来源于此。ADRC不依赖于系统精确数学模型,具有很强的解耦能力和抗扰动自适应能力,被广泛应用于工业过程中[10]。ADRC主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended status observer, ESO)、非线性误差反馈控制律(nonlinear state error feedback control law, NLSEF)[11-12]组成。其中,TD的作用是安排过渡过程,得到给定信号的跟踪值以及微分值。ESO是ADRC的核心部分,它提出的本质是为了消除干扰,是在状态观测器根据控制量和系统输出的基础上,把能够影响系统输出的“扰动”扩张成一个新的状态变量,从而构成了ESO,并且这里的“扰动”指的外部扰动与被控对象内部不确定性总和。传统的PID控制是将比例积分微分进行简单的线性组合,而NLSEF则使用非线性取代传统的线性组合来提高系统的控制精确度。将TD得到的跟踪信号与ESO得到的观测信号相减得到状态误差信号,对状态误差进行非线性组合,得到误差反馈控制量,并对其用扰动观测值的补偿来决定最终的控制量。NLSEF不仅提高了信息处理的效率,也较大程度的提升了系统的控制性能。
2.2一阶ADRC的设计及优化
首先研究#1电机速度控制,根据式(1),可得式(2)所示的#1电机速度控制系统:
x1=ωr1,
x2=np1J1-ωr1np1Tr1Lr1Ψ2r1-(TL1+r1F12),
u=ω1,
b=n2p1Tr1Ψ2r1J1Lr1,
x·=x2+bu,
y=x1。(2)
式中:x1是ωr1的状态量,u是控制量,x2是扰动量。
从式(2)可以看出,若能对x2进行观测及补偿,则可将#1电机速度控制系统近似为一阶积分型线性系统,根据ADRC的原理与优势,可用如图2所示的結构框图解决这一问题。
对于矢量控制的异步电机驱动系统,采用一阶ADRC,相应采用二阶的ESO结构。利用ADRC的特点,对于转动惯量变化引起的系统的模型误差和外加扰动TL1,以及张力F变化的影响,统一采用ESO进行观测和补偿,对主电机转速系统设计相应的ESO,采用典型ADRC模型中的非线性反馈运算,其模型如下:
e=z1-y,
z1=z1+h(z2-β01e+b0u),
z2=z2+h(-β02fal(e,α,δ))。(3)
上述的ESO设计,模型比较简单,保持了尽量多的已知模型信息,而将未知的和难以处理的部分归于扩张状态z2中加以观测。
在图2中,将TD得到的跟踪信号v1与ESO得到的观测信号z1相减得到状态误差信号e1,对状态误差进行非线性组合,得到误差反馈控制量u0,对u0用扰动观测值z2的补偿来决定最终的控制量u。
从图2可以看出,相比于PID控制器,ADRC有两个方面的缺陷:
1)ADRC的结构比起PID来说要复杂一点,这样会造成计算量比较大,从而导致系统的控制周期相对较长,对系统的控制性能有一定的影响。
2)ADRC的可调参数较多。为了使计算简单,减少参数,需要优化ADRC的结构。
ESO是ADRC的核心,一般不会改变,一阶ADRC对应的是二阶ESO,不含微分信号,由TD得到的微分信号便没有反馈,此时的TD只起到了跟踪、滤波的作用,跟踪过程只有在伺服系统中有意义,在异步电机调速中意义不大,所以可以直接省略一阶TD。对于NLSEF,可以直接用比例调节来替代非线性组合,只要选取合适的比例增益,其控制性能是可以同样保证和实现的。针对以上分析,构建如图3所示优化后的一阶ADRC结构框图。
优化后的一阶ADRC的完整算法表达式如公式(4)所示:
e=z1-y,
z1=z1+h(z2-β01e+b0u),
z2=z2+h(-β02fale,α,δ),
e1=v-z1,
u0=kpe1,
u=u0-z2b0。(4)
式中:e为观测误差;z1为y即x1的观测信号;y为系统实际输出信号;z2为系统总扰动即x2的观测值;h为积分步长,一般为采样周期值;b0为补偿因子;β01,β02为状态误差反馈增益;fal(e,α,δ)为幂次函数,如式(5)所示;α为非线性因子;δ为线性区间;e1为状态误差信号;v为给定信号;kp为反馈控制律比例系数;u为实际控制量;u0为误差反馈控制量。
fal(e,
