摆动喷管电动伺服系统复合控制方法
2018-05-14方世鹏胡昌华扈晓翔武志辉
方世鹏 胡昌华 扈晓翔 武志辉

摘 要:针对飞行器摆动喷管电动伺服系统在低气压高温升条件下的控制问题,提出一种复合控制方法。基于LuGre模型对伺服系统的复杂负载力矩进行建模,利用状态观测器和两个dual观测器推导出负载力矩参数自适应律,以期实现对负载力矩随外界条件变化时的拟合。采用自适应反步终端滑模算法,负载力矩估计值进行虚拟力矩补偿,同时解决控制电压与力矩干扰之间不匹配、电机电压扰动及参数变化的问题,理论分析证明所提控制算法对于匹配及非匹配不确定性都具备鲁棒性,能够保证跟踪误差最终一致有界。最后通过仿真及实验,验证了所提方法的有效性。
关键词:摆动喷管;永磁同步电机;负载建模;自适应滑模;反步法
中图分类号:TP 29
文献标志码:A
文章编号:1007-449X(2018)04-0113-08
Abstract:A composite control method is proposed for the high precision position control of motor servo systems of aircraft gimbaled nozzle. The complicate load was modeled based on the LuGre model. By using a state observer and two dual observers, the adaptive law of load model parameters was derived in order to approximate the real load which was changed with the change of working condition. The estimation of load torque was to compensate the virtual torque. The control input voltages were obtained through the adaptive backstepping terminal sliding mode control method with the virtual torque. The mismatch between the control voltages and torque disturbance, the voltage disturbance and the parameter variation of the motor were disposed by the proposed control method. The theoretical analysis proves that the proposed control algorithm is robust to the matched and unmatched uncertainties. The uniformly ultimately bounded convergence of tracking error can be guaranteed. Finally, simulations and experiments verify the effectiveness of the proposed method.
Keywords:gimbaled nozzle; permanent magnet synchronous motor; load modeling; adaptive sliding mode control; backstepping
0 引 言
推力矢量控制是一種通过控制主推力相对飞行器轴的偏转产生改变飞行器姿态所需力矩的控制技术,它不依赖于气动力,从而在低速高空时仍能产生较大的控制力矩,同时推力损失小,燃气动力品质优良[1],因此在飞行器中得以大量应用。推力矢量控制有很多种方法,摆动喷管推力矢量控制方法因其具有较好的方向性和简单的结构形式而被广泛采用。
推动喷管改变主推力方向需要一套伺服系统作为执行机构,伺服系统推动喷管时还需克服复杂的大负载力矩[2],为了满足大推力要求,以往通常采用液压伺服系统。由于PID算法结构简单,利于实现,因此工程应用中大多采用PID 控制算法控制液压伺服系统以获得满意的喷管控制性能[3],但是PID算法鲁棒性较差、参数整定困难、对系统参数变化和干扰敏感等缺点限制了控制性能的提升。文献[4]研究了摆动喷管电液伺服系统的终端滑模控制方法,采用干扰观测器(disturbance observer,DOB)观测外部力矩变化并进行前馈补偿,取得了较好的控制效果。液压系统维护成本高,液压油泄露容易造成污染等问题随着飞行器长时间储存和工作显得非常突出,与此同时,以高性能永磁体材料诞生为基础,迎来了电动机的飞速发展时期,永磁同步电机等体积小、力矩大、效率高的电动机[5],被越来越多的使用在高性能的驱动机构中,电动伺服系统克服了液压系统需要设计和维护复杂油路的不足,加之现代数字控制技术和电力技术的飞速发展也能允许更为复杂的控制算法,使得电动伺服系统逐步向大推力领域不断渗透。一些学者利用鲁棒PID控制器结合bang-bang控制算法对电动伺服系统进行控制[6],开启了摆动喷管高精度电动伺服系统先进控制算法的研究先例,但是文中做了较多的线性近似,且无法避免PID算法的不足。
本文以永磁同步电机(permanent magnet synchronous motor, PMSM)电动伺服系统作为摆动喷管的执行机构,研究低气压、高温升条件下如何提高摆动喷管的控制性能。以LuGre(Lund-Grenoble)模型为基础对伺服系统的负载力矩进行建模,同时考虑温度升高导致的负载力矩模型参数变化,利用状态观测器和dual观测器推导参数自适应律,并将负载力矩估计值用于虚拟力矩补偿,针对控制电压与扰动力矩的不匹配,及电动伺服系统本身的不确定性等问题,结合反步法和自适应控制方法,利用终端滑模控制算法产生控制电压,理论分析证明了所得控制电压对于匹配及非匹配不确定性均具有强鲁棒性。最后的仿真及实验结果表明,所提算法对于摆动喷管电动伺服系统具有良好的控制性能。
1 系统建模
如图1所示的飞行器摆动喷管伺服系统,喷管在伺服作动器的作用下实现偏摆,从而控制飞行器的偏航和俯仰姿态,整个伺服作动器按照上位机的指令动作,实际上是一类位置跟踪系统。
1.1 负载力矩建模
系统负载力矩[2]是以摩擦力矩为主,位置力矩、惯性力矩、阻尼力矩和偏心力矩共同组合而成的复杂负载形式。摩擦的强非线性特征及其复杂的产生机理至今尚未被完全描述清楚,但是可以对其随速度和位置的变化情况进行经验建模, LuGre摩擦模型[7]因其能描述摩擦的大部分动态特征而被广泛应用,LuGre利用一个内部摩擦状态(鬃毛的平均变形z(t))来描述摩擦力
1.2 永磁同步电机伺服系统模型
作动器为永磁同步电机驱动的伺服系统,若PMSM为隐极式,磁路不饱和,气隙磁场为正弦分布,忽略磁滞和涡流损耗影响,定子为三相对称绕组,可以建立d-q坐标系下的动力学方程如下式所示[8]
4 数值仿真与实验
对文中提出的负载力矩模型自适应特性以及控制规律进行数值仿真和实验,首先检验状态观测器、两个摩擦观测器以及由此导出的负载力矩模型参数自适应律的性能。
4.1 负载力矩模型的自适应特性
基于误差系统(5)设计数字仿真实验,来检验基于观测器提出的负载力矩模型的自适应特性。仿真实验框图如图2所示。
参考输入信号δr=1sint,取J=1 kg·m2,利用PID控制器建立闭环系统,PID参数为KP=10、KI=5、KD=6。模拟真实负载力矩采用式(2),假设负载力矩的参数随着环境因素在逐渐变化,在3个时间区间里,各个参数的取值如表1所示,表中各个参数σ0、σ1、σ2、kδ、Tp、Fs、Fc的单位分别为N·m/rad、N·ms/rad、N·ms/rad、N·m/rad、N·m、N·m、N·m,ωs取为0.001 rad/s,并设置扰动力矩为Ta=0.01sint。
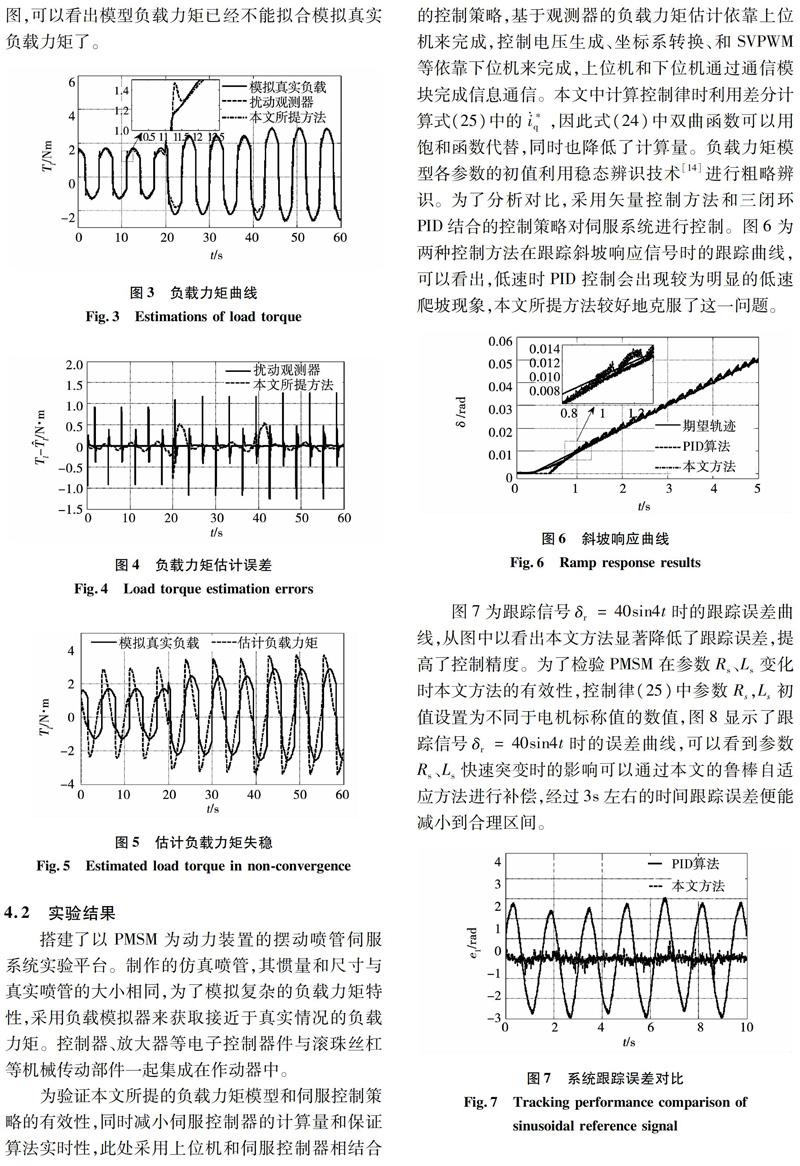
负载力矩的估计值都没有进行前馈补偿,两种方法的负载力矩估计值如图3所示,从图中可以看出,两种方法都能跟踪负载力矩的变化情况,就快速性而言,扰动观测器在20 s和40 s时应对负载力矩突变时要更迅速一些,这是与两者的机理相吻合的,扰动观测器的响应速度取决于其带宽,而自适应只能处理慢时变问题。同时从图4负载力矩拟合误差可知,本文的方法的误差要稍大一些,这是因为扰动力矩并没有包含在模型中,且静摩擦力和库仑摩擦力的变化是通过调整其他参数来适应的。然而扰动观测器有一个非常突出的不足,当它观测含摩擦力矩的负载力矩时,由于速度过零时的负载力矩变化非常快,受限于其带宽,导致扰动观测器无法观测到这种快速的变化,因此会出现图4中类似冲击一样的负载力矩误差,这种突变的力矩冲击对于控制系统补偿是非常不利的。本文所提的方法由于采用了动态摩擦模型,因此可以对速度过零时的负载力矩进行比较好的拟合,克服了扰动观测器带来的不足。未来将两种方法相结合,达到较为快速的辨识出负载力矩同时保持一定的辨识精度,是可以考虑的一个方向。
通过仿真还可以发现,投影算式(12)、式(14)是非常关键的,它相当于一种自适应关闭机制,保证负载模型参数收敛到一定范围内。由于所有的负载模型参数都是依靠状态观测误差ζ来驱动的,因此若是自适应参数γ0、γ1、γ2、γ3、γ4、γ5、γ6选择不当,则θ中各个参数收敛速度不同,極有可能出现参数失控,引发振荡等问题,从而导致模型不收敛。图5为没有采用投影算式,γ0、γ1、γ2、γ3、γ4、γ5、γ6取值为1,1,100,100,100,100,100时的负载力矩图,可以看出模型负载力矩已经不能拟合模拟真实负载力矩了。
4.2 实验结果
搭建了以PMSM为动力装置的摆动喷管伺服系统实验平台。制作的仿真喷管,其惯量和尺寸与真实喷管的大小相同,为了模拟复杂的负载力矩特性,采用负载模拟器来获取接近于真实情况的负载力矩。控制器、放大器等电子控制器件与滚珠丝杠等机械传动部件一起集成在作动器中。
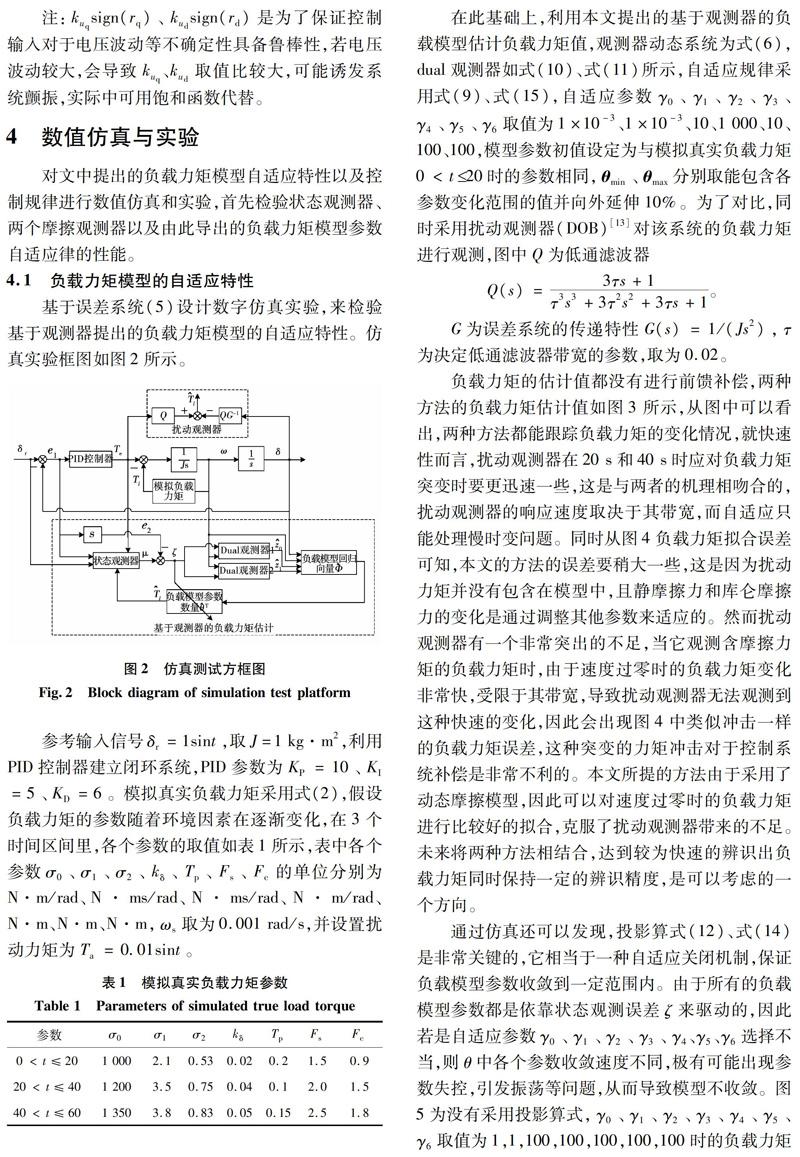
为验证本文所提的负载力矩模型和伺服控制策略的有效性,同时减小伺服控制器的计算量和保证算法实时性,此处采用上位机和伺服控制器相结合的控制策略,基于观测器的负载力矩估计依靠上位机来完成,控制电压生成、坐标系转换、和SVPWM等依靠下位机来完成,上位机和下位机通过通信模块完成信息通信。本文中计算控制律时利用差分计算式(25)中的i·*q,因此式(24)中双曲函数可以用饱和函数代替,同时也降低了计算量。负载力矩模型各参数的初值利用稳态辨识技术[14]进行粗略辨识。为了分析对比,采用矢量控制方法和三闭环PID结合的控制策略对伺服系统进行控制。图6为两种控制方法在跟踪斜坡响应信号时的跟踪曲线,可以看出,低速时PID控制会出现较为明显的低速爬坡现象,本文所提方法较好地克服了这一问题。
图7为跟踪信号δr=40sin4t时的跟踪误差曲线,从图中以看出本文方法显著降低了跟踪误差,提高了控制精度。为了检验PMSM在参数Rs、Ls变化时本文方法的有效性,控制律(25)中参数Rs,Ls初值设置为不同于电机标称值的数值,图8显示了跟踪信号δr=40sin4t时的误差曲线,可以看到参数Rs、Ls快速突变时的影响可以通过本文的鲁棒自适应方法进行补偿,经过3s左右的时间跟踪误差便能减小到合理区间。
5 结 论
对飞行器摆动喷管电动伺服系统高性能控制算法进行研究。针对复杂的负载力矩形式,以及低气压、高温升环境下系统参数变化带来的不确定等问题,提出了一种复合控制策略,并进行了仿真和实验。结果表明,所提控制方法能较好的补偿摩擦为主的负载力矩变化,克服传统三闭环PID控制导致的低速爬坡现象,且在匹配和非匹配不确定性条件下能取得良好的控制效果。本文的负载力矩估计是在上位机完成的,实际飞行器飞行中,所有的计算都必须由伺服控制器完成,这对于控制器的计算压力非常大,如何提高算法的实时性将是下步研究的重点。
参 考 文 献:
[1] 朱学平,祁鹏,张晓峰,等.摆动喷管控制导弹鲁棒飞行控制系统设计[J].固体火箭技术,2013,36(4):427.
ZHU Xueping, QI Peng, ZHANG Xiaofeng,et al. Design of robust autopilot control system for missile with movable nozzle thrust vector controlling [J]. Journal of Solid Rocket Technology, 2013, 36(4): 427.
[2] 刘宏博,周军,周凤岐.推力矢量控制伺服系统的负载及负载匹配[J].弹箭与制导学报,2006,26(2):740.
LIU Hongbo, ZHOU Jun, ZHOU Fengqi. The load and load matching of servo system for thrust vector control [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2006, 26(2): 740.
[3] Dragan V.Lazic', Milan R. Ristanovic'. Electrohydraulic thrust vector control of twin rocket engines with position feedback via angular transducers[J]. Control Engineering Practice, 2007, 15(5):583.
[4] 王衛红,孙良桦,张武龙. 摆动喷管的Terminal滑模鲁棒控制[J]. 电机与控制学报,2014,18(5):7.
WANG Weihong, SUN Lianghua, ZHANG Wulong. Terminal sliding mode robust control for swing nozzle [J]. Electric Machines and Control, 2014, 18(5):7.
[5] Jesús Linares-Flores, Carlos García-Rodríguez,Hebertt Sira-Ramírez,et al. Robust backstepping tracking controller for low-speed PMSM positioning system: design, analysis, and implementation[J]. IEEE Transactions on Industrial Informatics, 2015, 11(5):1130.
[6] LI Y, LU H, TIAN S, et al. Posture control of electromechanical-actuator-based thrust vector system for aircraft engine[J]. IEEE Transactions on Industrial Electronics, 2012, 59(9):3561.
[7] C.Canudas de Wit, H. Olsson, K. J. Astrom,et al. A new model for control of systems with friction[J]. IEEE Trans. Autom. Control, 1995, 40(3): 419.
[8] YU Jinpeng, SHI Peng, DONG Wenjie, et al. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors[J]. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(3):640.
[9] W J CHEN, K KONG, M TOMIZUKA. Dual-stage adaptive friction compensation for precise load side position tracking of indirect drive mechanisms[J]. IEEE Trans. on Contr. Systems Technology, 2015, 23(1):164.
[10] YAO B, BU F, REEDY J, et al. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments[J]. IEEE/ASME Transactions on Mechatronics.,2000, 5(1):79.
[11] L XU, B YAO. Adaptive robust control of mechanical systems with nonlinear dynamic friction compensation[J]. International Journal of Control, 2007, 81(2):167.
[12] 李升波,李克强,王建强,等.非奇异快速的终端滑模控制方法及其跟车控制应用[J].控制理论与应用,2010,27(5):543.
LI Shengbo, LI Keqiang, WANG Jianqiang,et al. Nonsingular fast terminal-sliding-mode control method and its application on vehicular following system [J]. Control Theory & Applications, 2010, 27(5):543.
[13] 王毅,何朕.伺服系统的摩擦补偿[J].电机与控制学报,2013,17(8):107.
WANG Yi, HE Zhen. Friction compensation for servo systems [J]. Electric Machines and Control,2013, 17(8):107.
[14] LEE T H,TAN K K,HUANG S. Adaptive friction compensation with a dynamical friction model[J]. IEEE/ASME Transactions on Mechatronics, 2011,16(1):133.
(编辑:刘素菊)
