四旋翼无人机建模与PID控制器设计
2018-05-14冯培晏
冯培晏


摘要:文中通过对四旋翼无人机的机体结构和飞行原理的认识,运用牛顿——欧拉法对四旋翼无人机进行动力学受力分析,在小角度转动下,建立了该无人机的数学模型。运用PID对其进行控制,通过无人机的数学模型,设计了双环PID控制器(内环姿态控制与外环位置控制),通过MATLAB仿真验证其有效性。
关键词:四旋翼无人机;建模;PID控制
中国分类号:TB472 文献标识码:A
文章编码:1672-7053(2018)06-0135-03
近年来,随着科技的不断发展和我国工业技术的不断革新,越来越多的研究机构投入到四旋翼无人机的研究中。四旋翼无人机由于不需要尾翼,在结构上与传统无人机相比,简单操作更加灵活多变、价格低廉、便于生产、拆卸方便、易于维护且方便运输,能够在狭小的空间内实现垂直起降、定点悬停、低速飞行、旋转、侧飞及倒飞等动作,操作灵活,可控性较强。四旋翼无人机的发展和研究以国内发展研究状况还存在这些问题:(1)数学模型建立无法完全精确:让四旋翼无人机的平稳飞行,必须在建立精准的数学模型下,才能设计得到的控制器。由于四旋翼无人机在实际飞行的过程中会遇到不确定性的外界因素的影响,和无人机机体还可能会受到自身的物理效应(陀螺效应、空气阻力、扰动气流等)的影响。再者传感器采集的飞行数据也会存在一定的误差,使得完全精准的四旋翼无人机的数学模型建立存在一定的难度;(2)飞行控制算法:四旋翼无人机本身就是一个6自由度、4个变量输入的多变量、强耦合的欠驱动非线性系统,对干扰十分敏感,再加上传感器精度和建模的准确性使得对控制器的设计造成了很大的不便。飞行控制算法是保证四旋翼无人机平稳飞行的前提。现在四旋翼无人机的飞行控制算法主要包括PID控制、滑模控制、H ∞控制、反步法以及智能控制等;(3)自主导航智能飞行:四旋翼无人机不但可以遥控器控制,还可以自主导航智能飞行;(4)最优化设计:在进行四旋翼无人机的总体设计时,既要保证速度和功耗在条件允许范围内,还要根据需求选择合适的无人机材料和配件。与之同时还要遵守体积小、质量轻、功耗小、成本低、响应快的原则。
本文通过对四旋翼无人机机体结构和飞行原理了解,运用牛顿欧拉定律对其进行动力学受力分析,建立其小角度飞行下的数学模型,运用PID算法设计了PID控制器,内环姿态控制与外环位置控制,并进行了matlab仿真验证其有效性。
1机体结构与飞行原理
四旋翼无人机拥有4个旋翼,且相互对称,分别分布在机体的前后、左右四个方向。如图1所示:
四旋翼飞行器控制机体的实时姿态和实时位置是通过调节4个电机转速实现的,电机转速的改变就改变了旋翼的转速,从而使每个旋翼产生的升力不同,在机架4个旋翼位置不同升力的变换,使得机体发生姿态和位置的变换。四旋翼无人机拥有4种不同的飞行方式:
1)垂直运动:当四旋翼無人机同时加大4个电机的相同转速时,4个旋翼增加相同的升力,若产生的总升力大于机体所受到的重力时,无人机便会垂直上升;反之,当其同时减少4个电机的相同转速时,产生的总升力小于机体所受的重力,就会垂直下降。如果在没有外界干扰时,无人机产生的总升力等于所受到的重力时,这时四旋翼无人机处于水平悬停。
2)偏航运动:前文提到,四旋翼无人机用了2个正桨和2个反桨,是为了抵消旋翼在旋转过程中所产生的扭矩,让无人机保持平稳的飞行。相邻的旋翼螺旋桨不同,对角线上的电机旋转方向也不同。旋翼产生的扭矩与旋翼自身的转速有关,当四个电机转速相同时,四个旋翼产生的扭矩相互抵消,四旋翼无人机不发生转动;当四个电机转速不完全相同时,不平衡的扭矩会引起四旋翼无人机转动。在图2(b)中,当电机2和电机4的转速上升,电机1和电机3的转速下降时,旋翼2和旋翼4对机身的反扭矩大于旋翼1和旋翼3对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机2、电机4的转向相反。
3)俯仰运动:电机1转速减少(增加),电机3转速增加(减少),保持电机2与电机4的转速不变。由于旋翼3升力增加(减少),旋翼1升力下降(增加),产生的不平衡力矩使机身倾斜,产生向前(向后)的分力,向前飞行。
4)横滚运动:横滚运动与俯仰运动的原理相同,电机2转速减少(增加),电机4转速增加(减少),保持电机1与电机3的转速不变。由于旋翼4升力增加(减少),旋翼2升力下降(增加),产生的不平衡力矩使机身倾斜,产生侧向的分力,侧向飞行。
四旋翼无人机的四种飞行运动模式可以相互叠加飞行,从而通过复杂的飞行运动完成指定的飞行任务和期望位置。
2建立数学模型
建立惯性坐标系N系与机体坐标系B系如图2所示:
本文选择的导航坐标系为地理坐标系,其的原点选在初始无人机位置,Z轴沿当地参考椭球的法线指向天顶,×轴在当地水平面内且沿当地经纬度指向东,Y轴沿当地子午线指向北。满足右手定则。在我国,地理系按照东一北一天的旋转次序选取,而在西方,地理坐标系按照北一东一地的旋转次序选取。
机体坐标系对于四旋翼无人机而言,无人机的质心为机体坐标系的原点,X轴从质心出发沿着机架指向1号旋翼,Y轴从质心指向4号旋翼,Z轴竖直向上,相互垂直且满足右手定则。
为了方便确定四旋翼无人机的姿态时,定义以下欧拉角:
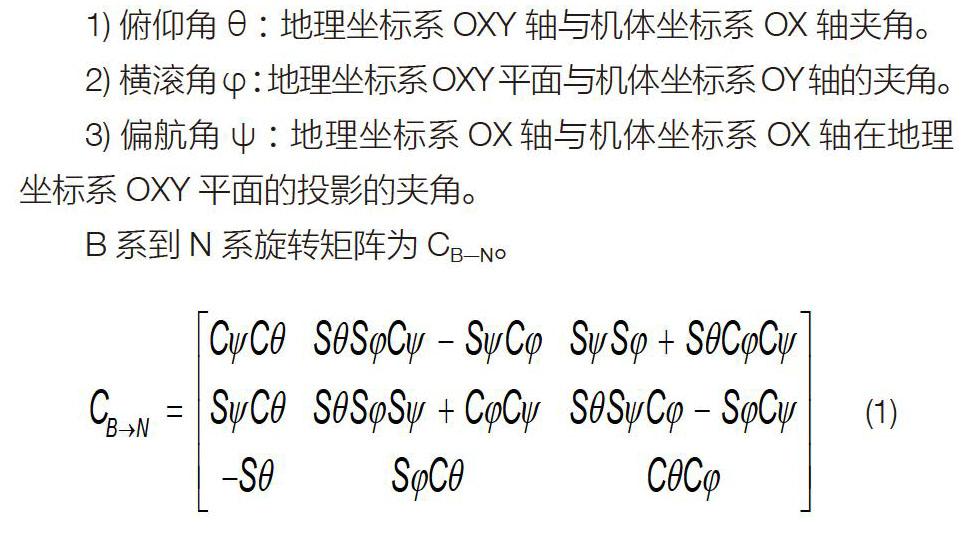
1)俯仰角θ:地理坐标系OXY轴与机体坐标系ox轴夹角。
2)横滚角φ:地理坐标系OXY平面与机体坐标系OY轴的夹角。
3)偏航角ψ:地理坐标系OX轴与机体坐标系OX轴在地理坐标系OXY平面的投影的夹角。
B系到N系旋转矩阵为CB-N。
其中C为cos,S为sin。
在建立四旋翼无人机动力学模型前,假设:(1)四旋翼无人机视为刚体且质量均匀保持不变;无人机是标准的十字对称型;(2)质心与B系原点重合;(3)不计地球自转和公转运动的影响,重力加速度不变。根据牛顿一欧拉定律,在小角度飞行下忽略空气阻力,螺旋桨的陀螺效应以及高阶量的乘积等,四旋翼无人机的数学模:
kt为升力系数,kd为扭矩系数,ω为各旋翼的旋转速度,U1垂直方向输入量,U2横滚控制输入量,U3俯仰控制输入量,U4偏航控制输入量,俯仰角θ,横滚角φ,偏航角ψ,lxlylz为惯性扭矩。
3 PID控制器设计
通过对四旋翼无人机的建模,设计器PID控制器,无人机控制结构如图3所示。
设定在飞行过程中,期望偏航姿态角ψd已经知道,期望位置信息为XdYdZd通过接收器得到,无人机机体位置信息X、Y、Z通过传感器反馈回飞控计算得出,与期望位置坐标信息对比,经过位置控制器计算得出控制量U1,此为四旋翼无人机的飞行升力,还得出期望俯仰姿态角θd与横滚姿态角φd。四旋翼无人机实际姿态角是通过IMU等传感器反馈回来的数据经过算法计算得出,与期望姿态角进行对比,再通过姿态控制器得出控制量U2U3U4。计算出的控制量经过PWM最终传给4个电机,从而改变无人机姿态与位置。
PID是P算法与I算法与D算法3中算法各种组合的统称。可以选择为PD,PI,单独的P算法等。P(比例控制)以减少系统稳定性为前提减小系统误差。I(积分)和D(微分)必须和P(比例)控制搭配使用,I(积分)反映系统的累计偏差,使系统消除稳态误差。D(微分)反映系统偏差信号的变化率,具有预见性,从而进行超前控制。四旋翼无人机的控制一般采用负反馈的PID控制器。稳定性(P和I降低系统稳定性,D提高系统稳定性):在平衡状态下,系统受到某个干扰后,经过一段时间其被控量可以达到某一稳定状态;准确性(P和I提高稳态精度,D无作用):系统处于稳态时,其稳态误差;快速性(P和D提高响应速度,I降低响应速度):系统对动态响应的要求。一般由过渡时间的长短来衡量。
PID控制器参数:
姿态回路P系数为15,i系数为0.2,d系数为9,位置回路P系数为12,i系数为0.1,d系数为5。
为了求取控制器的参数,需要获取无人机的动力学参数,主要包括机体机身高度、机体重量、旋臂臂展、绕三轴旋转的转动惯量以及螺旋桨的升力系数和扭矩系数。其中机体重量、旋臂臂展可以通过器件直接测量得出,螺旋桨的升力系数以及扭矩系数通过公式获取。计算无人机的升力系数及扭矩系数经验公式为Kt=CtρAr2;Kd=CdρAr2;在两个公式中,Ct,Cd表示螺旋桨的翼型相关的常数,ρ为空气密度,A为螺旋桨旋转一周扫过的面积,r为螺旋槳的长度。
假定四旋翼无人机完全对称,且四旋翼无人机质量分布均匀,那么四旋翼无人机的转动惯量为:绕X(或Y)轴的转动惯量lX(或lY以及绕Z轴的转动惯量lZ。假定四旋翼无人机的电机是标准圆柱体,无人机机体重心个个硬件的组合体包括负载视为一个标准的圆柱体,机体的四个悬臂均视为质量均有的长方体。根据经典力学中关于转动惯量的定义可知,若一个标准圆柱体绕其中心轴转动,其质量为m,半径为r,高度为h,那么其转动惯量为JX=JY=m(3r2+h2)/12绕其横截面上的某一轴转动的转动惯量为:JZ=m r2/2,若质量均匀的细杆(质量为m,长度为1)绕自身的中心转动,那么细杆的转动惯量为:J=ml2/12。在由转动惯量的平行轴定律可知,刚体的转动惯量,等于刚体对于通过质心并与该轴平行且距离为d的轴的转动惯俩个加上刚体的质量与两轴见距离的平方的乘机,即J=Jc+md2。实验所用无人机动力学参数为表1:
4实验仿真与结果
初始状态为【0 0 1 0 0 0】,期望的状态设定为[1 1 2 0 0 0],仿真结果如下图4所示。
由仿真图可以知道,由于耦合作用的影响等其他因素影响,PID控制对于四旋翼无人机的控制效果不是很好。
参考文献
[1]赵晨懿.浅谈无人机的发展现状与技术支持[J].海峡科技与产业,2017 (9):133-135.
[2]武丽敏.GPS在无人机上的应用[D].天津大学,2011.
[3] Tao Y, Xie G,Chen Y,etc. A PID and Fuzzy Logic Based Method for Ouadrotor Aircraft Control Motion[J]. Journal of Intelligent & Fuzzy Systems.2016, 31(6):2975-2983.
[4] Park S, Won D H,Kang M S,etc. RIC (Robust Internal-loop Compensator) Based Flight.Control ofa Cluad-Rotor Type UAV[C].IEEE International Conference on Intelligent Robots and Systems, 2015: 1024-1030.
[5] Liu Xiaogang, Song Guoshou. Adaptwe PID Controller Based on Fuzzy,Micro UAV Technology[C]. ELECTRONIC INFORMAT10N AND ELECTRICAL ENGINEERIKIG, 2013, 225-229.
[6]吴中华,贾秋玲.四旋翼几种控制方法研究[J].现代电子技术,2013,36 (15):88-94.
[7]侯圣勇四旋翼无人飞行器控制器的设计与实现[J].数字通信世界,2015 (10).
