参与微电网调频的电动汽车虚拟同步机充放电控制策略
2018-05-09刘其辉逯胜建
刘其辉, 逯胜建
(新能源电力系统国家重点实验室(华北电力大学), 北京市 102206)
0 引言
全球性的能源危机和环境污染推动了微电网技术及电动汽车行业的发展。微电网将分布式电源、储能装置、各类负荷以及监控保护装置进行有机整合,构成一种新型发配电系统,可以实现并网或独立运行[1]。当微电网并网运行时,其频率由大电网钳制,系统中调频电厂维持整个系统的频率稳定。由于风电和光伏等分布式电源具有强烈的间歇性和随机性,为了在独立运行时保持微电网频率稳定,需要配置足够容量的储能单元,增加了微电网的建设成本。而电动汽车作为移动储能设备,可以作为微电网独立运行时的备用容量[2]。另一方面,电动汽车入网 (vehicle to grid,V2G)技术参与微电网调频[3],为电动汽车用户和微电网带来了一定的经济效益,促进了可再生能源消纳[4],提高了微电网的频率稳定性,同时减少了微电网中可控电源建设和运营的成本[5]。
目前电动汽车参与电网调频控制策略的研究较多,主要都是针对大电网调频展开。文献[6]建立了计及可调用容量的电动汽车充放电静态特性模型,仿真模拟电动汽车参与调频的作用效果,但是没有针对二次调频控制展开详细研究。文献[7]提出了计及用户需求的电动汽车参与电网调频控制策略,并且建立了电动汽车参与调频的等效模型,但是没有针对多区域运行情况下调频控制效果进行验证。文献[8]提出了电动汽车作为可控负荷参与系统调频的控制策略,建立了计及电动汽车的单区域和双区域负荷频率控制模型,仿真验证了控制策略的正确性。文献[9]建立了集中充电站的协同调度模型,提出了集中模式下电动汽车调频控制策略,通过算例说明该调度模型和控制策略能够有效为系统提供调频服务。上述文献中均将电力系统和电动汽车简化为等效模型,没有建立具体的充电机模型和研究其调频过程中的动态特性,电动汽车充放电过程中仍存在惯量、阻尼缺失等问题。
虚拟同步机(virtual synchronous machine,VSM)技术是采用适当的并网变换器控制算法,使基于并网变换器的分布式电源从外特性上模拟或部分模拟同步电机的频率及电压控制特性的技术[10]。VSM一般有虚拟同步发电机和虚拟同步电动机两种形态[11]。VSM技术应用于电动汽车充/放电控制过程中,将有利于实现包括调频在内的电动汽车对微电网的调节功能。文献[12]应用VSM技术实现了微电网二次调频,但是没有考虑电动汽车接入的情况。文献[13-14]采用VSM技术实现电动汽车充电,有效抑制了负荷变化时系统频率振荡,但是没有对电动汽车在V2G模式下参与电网二次调频进行研究。文献[15]提出基于同步变流器的电动汽车V2G充放电策略,使得电动汽车具有参与电网调频的能力,但是缺少对控制策略有效性的理论分析。
本文针对现有研究的不足,考虑电动汽车的充/放电特性,基于VSM技术提出一种微电网中电动汽车充放电控制策略,在满足用户充电需求的同时,能够为微电网提供电压、惯量支撑,尤其是在微电网独立运行模式下,可在无通信的情况下参与微电网一次调频和二次调频,提高微电网频率稳定性。最后,利用MATLAB/Simulink仿真验证了控制策略的正确性和有效性。
1 含电动汽车的交流微电网结构
目前微电网主要有直流微电网、交流微电网和交直流混合微电网三种结构。考虑到设备特性、微电网建设成本和实现难易程度等,交流微电网目前仍是以可再生能源与电动汽车充放电设施集成应用为主要形式[16]。附录A图A1为一种有电动汽车接入的交流微电网,通过控制交流母线公共连接点(PCC)端口开关实现微电网并网与独立运行模式的切换。
2 电动汽车充/放电系统及电路模型
2.1 双向充/放电机电路及其控制结构
图1为电动汽车双向充/放电机的典型电力变换电路。该充/放电机由两级功率变换电路组成,包含前级脉宽调制(PWM)整流器(AC/DC变换器)及其配套LC滤波器和后级Buck-Boost直流变换电路(DC/DC变换器),两级电路通过直流母线进行连接。
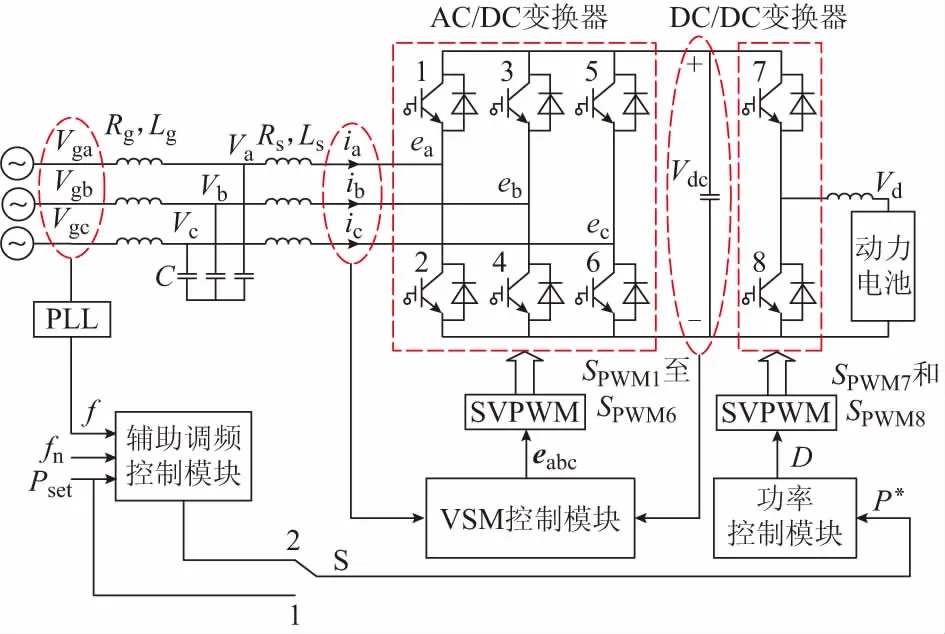
图1 双向充/放电机电路及其控制结构Fig.1 Circuit and structure of two-way charging machine
图1中:Vga,Vgb,Vgc为电网侧三相电压;Lg和Rg分别为电网侧电感和电阻;Rs,Ls,C构成LC滤波器;ea,eb,ec为AC/DC变换器交流侧三相电压;Va,Vb,Vc为LC滤波器电容端电压;ia,ib,ic为交流侧流入电流;Vdc为直流母线电压;Vd为DC/DC变换器低压侧电压;fn为微电网频率f的参考值;Pset为充/放电功率参考值;P*为DC/DC变换器功率参考值;D为功率控制模块输出的占空比;S为选择开关;PLL表示锁相环;SVPWM表示空间矢量脉宽调制。
如图1所示,本文提出的控制策略主要由三大模块构成,分别为AC/DC变换器的VSM控制模块、DC/DC变换器的功率控制模块及辅助调频控制模块。辅助调频控制模块实时监测电网频率,计算并输出DC/DC变换器功率参考值P*;功率控制模块跟踪功率参考值P*;VSM控制模块响应DC/DC变换器功率变化,基于VSM技术实现调频、调压等辅助功能。图中开关S用来选择充放电机的控制模式:当微电网并网运行时,微电网频率由大电网钳制,电动汽车不参与微电网调频,S置于1位置,辅助调频控制模块不起作用;当微电网独立运行时,电动汽车作为移动储能参与微电网调频,此时S置于2位置。
2.2 动力电池电路模型
目前比较常见的电池模型有R-2RC,R-RC和R结构等类型,相比于R结构,R-2RC和R-RC结构模型可以较为准确地反映动力电池的动态特性,其中R-2RC还能精确地反映电池单元的极化性质。本文主要研究充放电机的控制策略,对动力电池模型精确度要求不高,因此为简化分析,采用附录A图A2所示的R-RC结构的电池模型,其中Ebatt为其电动势,Vbatt为电池端电压,Rbatt为电池内阻,Rf为极化电阻,Cf为极化电容,可以反映电池充放电过程中的暂态反应。
3 AC/DC变换器的VSM控制模块
AC/DC变换器VSM控制模块的功能为:①实现对同步机固有的惯量/阻尼特性模拟;②实现同步机励磁控制特性模拟。本文采用文献[17]提出的“Synchronverter”型VSM技术,其思想是借鉴传统同步电机的基本特性方程设计变流器控制策略。将图1中LC滤波器阻抗Rs和Ls等效为同步机定子阻抗;ea,eb,ec等效为电机电动势;Va,Vb,Vc等效为电机定子三相端电压;电流ia,ib,ic等效为电网流入同步机定子的三相电流。这样就将AC/DC变换器等效为了同步电机,使其具备与同步电机相同的频率/电压下垂特性。同步电机的基本方程可以表示为:

(1)
e=MfifωA
(2)
Te=Mfif〈i,A〉
(3)
Q=-Mfifω〈i,B〉
(4)
(5)

(6)
式中:〈〉表示点积运算;J为虚拟惯量;Te为电磁转矩;Tm为机械转矩;Kd为阻尼系数;ωn为微电网的参考角频率(ωn=2πfn);ω为VSM角频率;e=[ea,eb,ec]T和i=[ia,ib,ic]T分别为VSM三相电动势和三相电流构成的向量;Mf为VSM定、转子之间的互感;if为虚拟励磁电流;θ为转子电角度;Q为VSM无功输入。
AC/DC变换器VSM控制模块如图2所示,主要由三部分组成:惯量、阻尼部分,计算部分及Q-V控制部分,其中Vn为端电压V的参考值,Vdcset为直流母线电压参考值,Td为虚拟阻尼转矩。

图2 AC/DC变换器的VSM控制模块Fig.2 VSM control module of AC/DC converter
惯量、阻尼部分反映了VSM的机械特性,以式(1)为基础实现。机械转矩由直流母线电压比例—积分(PI)调节器输出,如式(7)所示。
(7)
式中:Kpdc和Kidc分别为PI调节器的比例和积分系数。
图2中计算部分对应式(2)至式(6),实现同步机基本电磁和机械特性的模拟计算,输入为虚拟角频率ω、转子电角度θ及电流向量i;输出为电磁转矩Te,无功功率Q和电压向量e。
Q-V控制部分采用下垂控制,用于模拟传统同步电机的励磁控制特性,图2中Dq为电压下垂系数,定义为无功功率变化量ΔQ与电压变化量ΔV的比值,如式(8)所示。Mfif由ΔQ与Q作差,经过增益为1/K的积分环节得出,其中K为积分系数[16]。
(8)
在具体设计中,惯量系数J、积分增益1/K的数值参考文献[17]的方法进行选取,此处不再赘述。
4 辅助调频控制模块
辅助调频控制模块的功能是在微电网独立运行模式下,当微电网内部调频资源不足时,可根据微电网频率变化改变电动汽车充/放电功率,参与调节微电网频率,提高调频特性或降低对微电网固定调频资源的需求。调频控制模块分为两个环节:一次调频和二次调频。一次调频针对变化周期短、幅度小的频率变化进行调节;二次调频针对周期较长、幅度较大的频率变化进行调节。
4.1 一次调频环节
一次调频采用下垂控制实现,与传统下垂控制不同的是,一方面需要防止轻微频率波动下电动汽车充/放电功率频繁波动对电池寿命及健康状态的影响;另一方面,受电动汽车用户出行需求、电池寿命及充放电机本身功率限制,其充放电功率存在上下限值。考虑到以上两个因素,本文在一次调频控制中设置频率调节死区和功率上下限,图3所示为考虑调节死区和功率限值的电动汽车静态频率特性[6]。
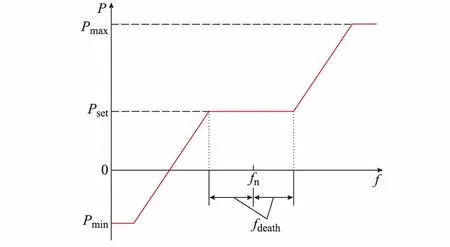
图3 电动汽车充电频率下垂特性Fig.3 Droop characteristic of charge frequency for electric vehicle
图中:fdeath为死区值;P为充/放电功率,P>0表示充电,P<0表示放电;Pmax和Pmin分别为充/放电功率上、下限,由充电机本身功率限制、用户出行需求和电池寿命共同决定[6],其表达式分别为:

(9)
(10)
ΔS1=100%-St
(11)
ΔS2=Smin,t+Δt-St
(12)
式中:Pchar,max为充电机本身允许的最大充电功率;ηchar为电池充电效率;Cev为电池容量;Δt为控制周期,其值由人为决定;St为当前时刻t的剩余电量;ΔS1为Δt时段内电动汽车可以增加的最大荷电状态(SOC)值;Pdischar,max为充电机本身允许的最大放电功率,且Pdischar,max>0;ηdischar为电池放电效率;ΔS2为t+Δt时刻所允许的最小电量Smin,t+Δt与当前时刻电量St的差,Smin,t+Δt考虑电池寿命和用户出行需求计算得到,文献[6]有详细介绍,此处受篇幅限制不再赘述。ΔS2>0表示当前电池SOC没有达到t+Δt时刻允许的最小电量,此时不允许电池放电,Pmin>0,Pmin表示允许最小充电功率;ΔS2<0表示当前电池SOC已经达到t+Δt时刻允许的最小电量,此时允许电池放电,Pmin<0,|Pmin|表示允许最大放电功率。
附录A图A3为一次调频控制环节的实现原理,其中Kpf为下垂系数,定义为:

(13)
当频率处于死区[fn-fdeath,fn+fdeath]时,一次调频环节不发挥作用;当电网频率变化超出死区时,输出一次调频功率指令ΔP1。
4.2 二次调频环节
传统电力系统二次调频在各机组调速器一次调频的基础上通过调频机组(电厂)对频率进行进一步调整。通过调频器增加或减少调频发电机组的输出功率,平移其静态频率特性,控制电网频率在额定值。借鉴上述思路,设计电动汽车充电控制策略中的二次调频环节。与传统发电机不同,电动汽车是一种既可以充电也可以放电的特殊负荷/电源,以负荷和分布式备用电源两种形式存在于系统中。本文提出的改进二次调频采用两级控制的思想:微电网中分布式电源参数可获得,第1级控制利用这些获得的参数计算“功率修正量”ΔP2,快速补偿系统功率缺额;由于第1级控制为开环控制,无法做到无差调节,因此设置第2级积分控制,消除第1级控制后的微小频率偏差。这样通过两级控制,一方面可以使得电动汽车快速响应频率偏差,另一方面可以减小和消除稳态频率偏差。
根据文献[18]可知,常规负荷的静态频率特性可用上垂斜线表示,由图3所示的电动汽车静态频率特性和常规负荷的静态频率特性叠加得到考虑电动汽车接入的微电网静态频率特性,如图4所示。图中:PL1,PL2,PL3表示包含电动汽车的综合负荷静态频率特性;PG1和PG2表示微电网中电源的静态频率特性。曲线PL1,PL2,PL3由额定频率fn向两边延伸,斜率先变大后变小,这是由于当系统频率处于死区内时,电动汽车不表现下垂特性,且当电动汽车功率达到限值时,其充/放电功率维持在限值,电动汽车一次调频不再发挥作用。以KG表示电源的频率调节系数,KL表示常规负荷频率调节系数,则图中曲线AD段斜率为KL,BD段斜率为Kpf+KL,BC段斜率为-KG。

图4 有电动汽车接入的微电网静态频率特性Fig.4 Static frequency characteristic of microgrid with electric vehicles
当发电功率突增/降或者冲击性、间歇性负荷突增/降造成微电网频率大幅度变化且超出频率允许波动范围[fmin,fmax]时,改变电动汽车充/放电功率参考值,平移负荷静态频率特性曲线,将微电网频率控制在允许的误差范围内。图4中,假设微电网最初稳定运行在A点,某一时刻发电功率突降ΔPG0,发电频率特性曲线由PG1降到PG2,电源运行点由A点变为E点,此时微电网中发电量不能满足负荷需求,频率将下降。在频率下降的同时,微电网中电源发电功率因它的一次调频特性而增大,从图中运行点E沿电源频率特性PG2向上移动;传统负荷功率将因本身的调节效应而减小,电动汽车充电功率将在一次调频的作用下也减小,因此微电网中计及电动汽车的负荷减小,减小的趋势为由图4中A点沿负荷频率特性PL1向下转移。可知B点为新的稳定工作点,对应的频率f超出允许范围。如果在下垂调节基础上进一步考虑基于平移负荷频率特性的二次调频作用,假设f′作为二次调频后最终运行频率,则充/放电功率参考值Pset减小ΔP2,负荷静态频率特性由PL1平移到PL2,最终的稳定运行点由B点移动至C点。
一般选择f′=fn,由图4可知ΔP2为:
ΔP2=Kpf(fn-fdeath-f)+(KG+KL)(fn-f)
(14)
为计算方便,计算ΔP2时一般不考虑常规负荷频率响应特性,即取KL为0,则式(14)可以表示为:
ΔP2=Kpf(fn-fdeath-f)+KG(fn-f)
(15)
通过ΔP2可以快速补偿微电网功率缺额,但是在ΔP2计算过程中假设传统负荷频率调节系数KL为0,二次调频结果必然存在偏差。为了将频率准确控制在fn,除了上述的开环控制外,再增加一级闭环控制:将fn与实际测量频率f作差,经过系数为1/Ti的积分环节得到ΔP2′,对ΔP2进行微调,可以在快速补偿功率缺额的基础上减小和消除稳态频率偏差。附录A图A4所示为改进的二次调频控制环节,此时充/放电功率参考值Pset′为:
Pset′=Pset-ΔP2-ΔP2′
(16)
辅助调频控制模块的输出由一次调频和二次调频环节输出相加得到,判断该模块输出Pset′+ΔP1是否超出电动汽车充放电功率上下限,将Pset′+ΔP1分别与图3中充/放电功率上、下限Pmax和Pmin进行比较,得出最终充/放电功率参考值P*为:
(17)
4.3 调频效果分析
下面对调频控制模块的控制效果进行分析。为了简化分析,忽略一次调频控制中的死区,即令fdeath=0,且假设电动汽车备用容量足够,此时计及电动汽车的负荷频率调节系数为Kpf+KL,不计二次调频环节,可得微电网的频率调节系数为:
Ks1=KG+(Kpf+KL)
(18)
计及电动汽车二次调频环节,由微电网频率调节系数的意义[18]可以得到微电网频率f满足:
ΔPG0-(ΔP2+ΔP2′)=
(19)
将式(14)代入式(19)可以得到:
(20)
类似可以得到传统单独积分控制下频率偏差为:
(21)
由式(20)和式(21)可知,当t→∞,s→0时,f=fn。可见,采用本文提出的调频控制和传统单积分控制都可以实现微电网频率的无差调节。但是由于本文二次调频控制采用了两级调整的作用,式(20)右侧分式的分母非积分项为式(21)的两倍,可以使得电动汽车快速响应频率偏差,减小频率的动态偏差。
5 DC/DC变换器功率控制模块

6 算例验证
6.1 算例系统
基于MATLAB/Simulink仿真平台,搭建了附录A图A1所示的微电网模型,其中光伏系统(G1)和风电系统(G2)采用最大功率追踪控制,为研究方便,此处假设其发电功率恒定,储能系统(G3)和燃气机(G4)为可控电源,采用传统下垂控制参与微电网的电能质量调节,下垂系数已知。由一个等值充电机表示充电站,经过交流母线接入微电网,其电路采用图1所示拓扑,采用磷酸铁锂电池作为电动汽车动力电池,设置动力电池最大充电功率为15 kW,最大放电功率为10 kW,电池额定端电压为300 V,额定容量为200 Ah,初始SOC的百分比为60%。微电网仿真参数和充电机及其控制参数见附录B表B1和表B2。
6.2 并网运行仿真
当微电网并网运行时其电压和频率由大电网决定,对电动汽车正常接入后的充电情况进行仿真,验证充电控制策略下惯量、阻尼的作用。仿真工况如下:t=0.5 s时,设置电动汽车充电参考功率为5 kW;t=1.5 s时,设置电动汽车充电功率为10 kW;在t=3 s时,结束仿真。
附录A图A6(a)为电动汽车充电功率及其参考值,可知动力电池充电功率实时跟踪功率参考值,附录A图A6(b)为动力电池剩余电量,从0.5 s开始增长,1.5 s增速变大。附录A图A6(c)给出从交流母线流入充电机前级AC/DC变换器的有功功率,0.5 s时充电功率变为5 kW,在虚拟惯量、阻尼的作用下,微电网流入变换器的功率经过一个0.5 s的动态过程达到稳定,1.5 s时充电功率的变化情况与之类似。
由附录A图A6及上述分析可知,在微电网并网运行时,电动汽车充电功率可以实时跟踪其参考值,同时由于虚拟惯量和阻尼的存在,AC/DC变换器功率变化的动态过程中具有了惯性,克服了传统电力变换器惯性和阻尼不足的问题,可以改善大规模电动汽车和分布式电源并网运行的特性,降低对电网的功率冲击。
6.3 独立运行仿真
当微电网独立运行时,需要依靠内部的分布式电源提供稳定可靠的电能来满足负荷用电需求,其电压和频率通过可控电源控制在正常范围内。在本文提出的充电控制策略下,电动汽车可以为微电网提供惯量支撑,参与电压和频率调节,提高微电网稳定性,下面分别进行验证。
6.3.1虚拟惯量、阻尼作用验证
附录A图A7所示为微电网独立运行模式下电动汽车充电过程中微电网频率的仿真结果,仿真工况如下:起始电动汽车充电功率为5 kW;t=1 s时充电功率变为7 kW;t=2 s时,加入微电网中常规负荷Load4。附录A图A7中红线为采用本文提出的充电控制策略(Kd=10)的仿真结果;绿线为采用本文控制策略,但是减小虚拟阻尼(Kd=4)的仿真结果;蓝线为采用传统功率跟踪控制策略的仿真结果,仿真中电动汽车不参与微电网频率/电压调节。
由附录A图A7(a)可知:充电功率变化相同时,本文控制策略下微电网频率缓慢降低到49.94 Hz,响应时间约为0.4 s;减小虚拟阻尼时频率经过一个周期约为0.4 s的减幅振荡过程稳定到49.94 Hz,呈现出欠阻尼特性;传统功率跟踪控制下,微电网频率突降为49.94 Hz,响应时间约为0.1 s,且稳定过程中产生一个向下的尖峰,频率波动约为0.04 Hz,并呈现出欠阻尼特性。由附录A图A7(b)可知:当微电网中常规负荷突变时,微电网频率突变,在本文提出的控制策略下频率动态过程中频率最小值为49.84 Hz,且频率很快回升到49.9 Hz,再经过0.4 s左右的时间稳定到49.87 Hz;减小阻尼作用时频率回升到49.9 Hz,之后经过一个周期约为0.4 s的减幅振荡过程稳定到49.87 Hz;在传统功率跟踪控制下,频率动态过程中的频率最小值为49.825 Hz,频率动态偏差较大。
由附录A图A7和上述分析可知,虚拟惯量可以延迟微电网频率变化的速度,抑制频率的快速变化,而虚拟阻尼可以抑制频率振荡。本文提出的控制策略可以有效地缓解电动汽车充电功率和微电网中其他负荷功率突变对微电网造成的冲击,为其提供惯量支撑,提高微电网的动态稳定性。同时,上述结论与文献[19]中在环实验结论相吻合,证明了本文控制策略的正确性。
6.3.2调压作用验证
电动汽车调压仿真结果如附录A图A8所示,图A8(a)和图A8(b)分别为仿真过程中AC/DC变换器输出到微电网的无功功率和其交流侧端电压参考值Vn与端电压V的误差。仿真工况如下:电动汽车以5 kW功率充电,1.5 s时引入电压下垂控制。可以看出,在下垂控制作用下,流入AC/DC变换器的无功功率由零变为4.3 kvar,同时Vn-V变小。说明本文提出的充电控制策略下电动汽车具有参与微电网调压的能力。
6.3.3调频作用验证
下面分别对电动汽车参与独立模式下微电网一次、二次调频进行仿真验证。
1)一次调频验证
为了说明图3中调频死区和电动汽车充/放电功率限值的作用,设置两种电动汽车EV1和EV2的调频参数分别如附录B表B3所示。设置三种情况进行对比:①EV1参与一次调频;②EV2参与一次调频;③电动汽车不参与一次调频。
仿真工况如下:1 s之前电动汽车充电功率为5 kW;t=1 s时,加入小负载Load6;t=2 s时,加入负载Load5。
仿真结果如附录A图A9所示。由图A9可知,电动汽车不参与调频时,其充电功率始终不变,微电网频率只由分布式电源调节,且频率偏差较有电动汽车参与调频时大很多。下面主要分析EV1和EV2参与一次调频时充电功率和微电网频率的变化。当小负荷Load6加入后频率产生微小偏差,由于死区的作用,EV1充电功率不变,而EV2死区为0,其充电功率随着频率的变化而变化。由附录A图A9(b)可知:1~2 s时,EV1参与调频时的微电网频率偏差大于EV2参与时的频率偏差;2 s时负载Load5的加入使得系统频率波动超过死区0.02 Hz,EV1和EV2均参与一次调频,充电功率降低。由于EV1充电功率的下限为2.5 kW,其充电功率在达到2.5 kW后保持不变;EV2充放电功率范围较宽,其充电功率在一次调频控制下稳定在2 kW。2 s之后,EV1参与调频时的微电网频率偏差比EV1参与时的频率偏差大。
由上述分析可知,一次调频控制可以有效地减小微电网频率偏差,且当微电网中有类似于Load6的随机小负荷波动时,调频死区的存在可以有效防止电动汽车充电功率频繁波动,同时设置功率上下限可以将电动汽车充/放电功率限制在合理范围内。
2)二次调频验证
采用附录B表B3中的EV2参数,设置频率允许波动范围[fmin,fmax]=[49.95,50.05]Hz。仿真工况如下:1.5 s之前充电功率为5 kW;t=1.5 s时,加入负载Load4至Load6。
为了说明本文二次调频环节的调节作用,此处针对两种二次调频方案进行对比仿真。
附录A图A10为仿真结果,其中图A10(a)和图A10(b)分别为电动汽车充/放电功率和微电网频率,可见1.5 s之前电动汽车充电功率稳定在5 kW;t=1.5 s时微电网中加入负载Load4至Load6后,由于负荷变化造成微电网频率下降,且超出频率波动允许范围,二次调频环节动作。由附录A图A10(a)和图A10(b)可知,在本文控制策略下,由于二次调频的两级控制中的第1级控制快速计算“功率修正量”ΔP2,并改变电动汽车充放电功率参考值,电动汽车充电功率迅速下降,由充电状态变为放电状态,并最终以2.5 kW左右的放电功率稳定运行;附录A图A10(b)中微电网频率经过0.5 s左右的时间恢复稳定,并维持在50 Hz,且稳定过程中频率偏差最大为0.06 Hz。在传统的积分控制策略下,电动汽车充电功率经过一个小幅度波动后缓慢下降,并由充电状态变为放电状态,在2 s左右达到放电最大值,并最终以2.5 kW左右的功率放电运行;对应的微电网频率经过1.2 s左右的时间稳定恢复到50 Hz,且稳定过程中频率偏差最大为0.17 Hz。
上述仿真结果与4.3节中分析结果一致,由于二次调频控制环节中两级控制的作用,电动汽车快速参与微电网调频,并实现无差控制。相比于传统积分调频控制策略,微电网动态频率偏差更小,频率恢复稳定的动态过程时间短,调频效果更佳。
实际微电网独立运行时由可控电源与电动汽车共同参与二次调频,此处通过算例对比分析电动汽车与可控电源共同参与微电网二次调频的情况:电动汽车采用本文提出的二次调频策略、电动汽车采用积分控制参与二次调频和电动汽车不参与二次调频三种工况。t=1.5 s时加入负载Load4至Load6,在上述三种控制工况下对可控电源出力增量、电动汽车充放电功率和微电网频率进行比较,仿真结果见附录A图A11。
由附录A图A11可知,电动汽车不参与调频时微电网功率缺额全部由可控电源补偿,电动汽车充电功率经过动态波动恢复到初始值;电动汽车通过改变充放电功率,与可控电源共同参与二次调频时,微电网功率缺额由电动汽车和可控电源共同补偿,此时可控电源出力和动态频率偏差减小。与传统的单积分二次调频方式相比,电动汽车采用本文提出的二次调频策略时,微电网可控电源出力及动态频率偏差更小。可见,在与可控电源共同参与二次调频时,本文提出的二次调频控制策略可以进一步降低对微电网可控电源容量的要求,减少微电网可控电源投资成本,同时减小动态频率偏差。
7 结语
电动汽车作为一种移动的储能设备,在接入微电网后可为其在独立运行模式下提供调频备用容量,减少对微电网调频资源的需求,带来明显的经济效益。通过采用VSM控制技术,变换器具有与同步电机相似的运行特性,能够自主参与微电网的频率和电压调节。本文基于VSM技术,设计了具有惯量/阻尼模拟、电压支撑和辅助频率调整的电动汽车充电控制策略,并通过仿真算例进行了验证。本文提出的控制策略的特点可总结如下。
1)所提充/放电控制策略基于两级双向充放电机,能够在满足用户充电需求的同时,参与微电网调频、调压服务,节约微电网建设成本,实现微电网的一次调频和二次调频。
2)双向充/放电机中AC/DC变换器采用VSM控制技术,引入了虚拟惯量、阻尼及励磁特性模拟,不但起到了电网和电动汽车之间的柔性缓冲作用,为微电网提供了惯量支撑,而且还可以提供无功电压调节功能。
3)本文重点研究针对微电网独立运行模式的电动汽车辅助调频控制算法。在一次调频部分,加入了限制频繁充放电的死区环节及电动汽车充放电功率限制环节;在二次调频部分,提出了改进的二次调频控制方法:首先计算“功率修正量”ΔP2,然后再根据实时微电网频率通过一个积分环节进行微调。仿真表明,相比于传统调频方法,该方法调节时间短,超调量小,动态性能好。
4)本文提出的控制策略只适用于独立运行模式下的微电网调频,应用范围有限。随着电动汽车数量的不断增加,有必要对大规模电动汽车参与大电网频率调节的控制策略进行研究。下一步工作将在本文工作的基础上研究大规模电动汽车接入后参与大电网调频的控制策略。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
[1] 杨新法,苏剑,吕志鹏,等.微电网技术综述[J].中国电机工程学报,2014,34(1):57-70.
YANG Xinfa, SU Jian, LÜ Zhipeng, et al. Overview on micro-grid technology[J]. Proceedings of the CSEE, 2014, 34(1): 57-70.
[2] 吴红斌,侯小凡,赵波,等.计及可入网电动汽车的微网系统经济调度[J].电力系统自动化,2014,38(9):77-84.DOI:10.7500/AEPS20130911002.
WU Hongbin, HOU Xiaofan, ZHAO Bo, et al. Economical dispatch of microgrid considering plug-in electric vehicles[J]. Automation of Electric Power Systems, 2014, 38(9): 77-84. DOI: 10.7500/AEPS20130911002.
[3] MONTEIRO V, PINTO J G, AFONSO J L. Operation modes for the electric vehicle in smart grids and smart homes: present and proposed modes[J]. IEEE Transactions on Vehicular Technology, 2016, 65(3): 1007-1020.
[4] 武小梅,谢旭泉,林翔,等.电动汽车提供备用服务的地区电力市场模型[J].电力系统自动化,2016,40(24):71-76.DOI:10.7500/AEPS20160201008.
WU Xiaomei, XIE Xuquan, LIN Xiang, et al. Local electricity market model considering reserve service provided by electric vehicles[J]. Automation of Electric Power Systems, 2016, 40(24): 71-76. DOI: 10.7500/AEPS20160201008.
[5] 茆美琴,孙树娟,苏建徽.包含电动汽车的风/光/储微电网经济性分析[J].电力系统自动化,2011,35(14):30-35.
MAO Meiqin, SUN Shujuan, SU Jianhui. Economic analysis of a microgrid with wind/photovoltaic/storages and electric vehicles[J]. Automation of Electric Power Systems, 2011, 35(14): 30-35.
[6] 何晨颖,耿天翔,许晓慧,等.利用电动汽车可调度容量辅助电网调频研究[J].电力系统保护与控制,2015,43(22):134-140.
HE Chenying, GENG Tianxiang, XU Xiaohui, et al. Research on grid frequency regulation using schedulable capacity of electric vehicles[J]. Power System Protection and Control, 2015, 43(22): 134-140.
[7] 鲍谚,贾利民,姜久春,等.电动汽车移动储能辅助频率控制策略的研究[J].电工技术学报,2015,30(11):115-126.
BAO Yan, JIA Limin, JIANG Jiuchun, et al. Research on the control strategy of electric vehicle mobile energy storage in ancillary frequency regulation[J]. Transactions of China Electrotechnical Society, 2015, 30(11): 115-126.
[8] 张谦,周林,周雒维,等.计及电动汽车充放电静态频率特性的负荷频率控制[J].电力系统自动化,2014,38(16):74-80.DOI:10.7500/AEPS20131210005.
ZHANG Qian, ZHOU Lin, ZHOU Luowei, et al. Load frequency control considering charging and discharging static frequency characteristics of electric vehicles[J]. Automation of Electric Power Systems, 2014, 38(16): 74-80. DOI: 10.7500/AEPS20131210005.
[9] 姚伟锋,赵俊华,文福拴,等.集中充电模式下的电动汽车调频策略[J].电力系统自动化,2014,38(9):69-76.DOI:10.7500/AEPS20130513005.
YAO Weifeng, ZHAO Junhua, WEN Fushuan, et al. Frequency regulation strategy for electric vehicles with centralized charging[J]. Automation of Electric Power Systems, 2014, 38(9): 69-76. DOI: 10.7500/AEPS20130513005.
[10] 张兴,朱德斌,徐海珍.分布式发电中的虚拟同步发电机技术[J].电源学报,2012,10(3):1-6.
ZHANG Xing, ZHU Debin, XU Haizhen. An equivalent odd harmonics resonant controller for single-phase DVRs[J]. Journal of Power Supply, 2012, 10(3): 1-6.
[11] 吕志鹏,盛万兴,刘海涛,等.虚拟同步机技术在电力系统中的应用与挑战[J].中国电机工程学报,2017,37(2):349-360.
LÜ Zhipeng, SHENG Wanxing, LIU Haitao, et al. Application and challenge of virtual synchronous machine technology in power system[J]. Proceedings of the CSEE, 2017, 37(2): 349-360.
[12] 梁英,盛万兴,钟庆昌,等.基于同步逆变器的微电网二次调频策略及特性分析[J].中国电机工程学报,2017,37(2):391-403.
LIANG Ying, SHENG Wanxing, ZHONG Qingchang, et al. Secondary frequency regulation strategies and characteristic analysis of synchronverter-based microgrids[J]. Proceedings of the CSEE, 2017, 37(2): 391-403.
[13] REZKALLA M, ZECCHINO A, PERTL M, et al. Grid frequency support by single-phase electric vehicles employing an innovative virtual inertia controlle[C]// 51st International Universities Power Engineering Conference, September 6-9, 2016, Coimbra, Portugal: 1-6.
[14] 吕志鹏,梁英,曾正,等.应用虚拟同步电机技术的电动汽车快充控制方法[J].中国电机工程学报,2014,34(25):4287-4294.
LÜ Zhipeng, LIANG Ying, ZENG Zheng, et al. Virtual synchronous motor based control scheme of fast charger for electric vehicle application[J]. Proceedings of the CSEE, 2014, 34(25): 4287-4294.
[15] 刘东奇,钟庆昌,王耀南,等.基于同步逆变器的电动汽车V2G智能充放电控制技术[J].中国电机工程学报,2017,37(2):544-556.
LIU Dongqi, ZHONG Qingchang, WANG Yaonan, et al. A synchronverter-based V2G smart charging and discharging control strategy for electric vehicles[J]. Proceedings of the CSEE, 2017, 37(2): 544-556.
[16] 肖湘宁,陈征,刘念.可再生能源与电动汽车充放电设施在微电网中的集成模式与关键问题[J].电工技术学报,2013,28(2):1-14.
XIAO Xiangning, CHEN Zhen, LIU Nian. Integrated mode and key issues of renewable energy sources and electric vehicles’ charging and discharging facilities in microgrid[J]. Transactions of China Electrotechnical Society, 2013, 28(2): 1-14.
[17] ZHONG Qingchang, WEISS G. Synchronverters: inverters that mimic synchronous generators[J]. IEEE Transactions on Industrial Electronics, 2011, 58(4): 1259-1267.
[18] 李庚银.电力系统分析基础[M].北京:机械工业出版社,2011.
[19] 孟建辉,石新春,王毅,等.改善微电网频率稳定性的分布式逆变电源控制策略[J].电工技术学报,2015,30(4):70-79.
MENG Jianhui, SHI Xinchun, WANG Yi, et al. Control strategy of DER inverter for improving frequency stability of microgrid[J]. Transactions of China Electrotechnical Society, 2015, 30(4): 70-79.
刘其辉(1974—),男,博士,副教授,主要研究方向:新能源发电与并网控制。E-mail: liuqihuifei@163.com
逯胜建(1992—),男,通信作者,硕士研究生,主要研究方向:新能源发电与并网控制。E-mail: 446779441@qq.com
