轨道交通车辆模态参数辨识方法研究*
2018-04-27程畅
程 畅
(常州轻工职业技术学院,213164,常州∥副教授)
轨道交通车辆运行平稳性是车辆动力学性能的重要评价指标。模态参数是轨道交通车辆的固有参数,反映振动系统的固有动态特性[1],由悬挂系统的刚度及阻尼,以及部件的惯量及其在系统中的位置共同确定。车辆一旦设计制造完毕,其动力学性能就基本确定。真实车辆的模态参数可在试验台或运行工况下通过试验设计及振动测试,并采用相应的辨识算法通过辨识得出[2]。由于模态参数不依赖于线路输入条件,而试验测试得到的模态参数反映了真实车辆包括组装性能在内的系统动态特性,故通过运用模态参数来评价轨道交通车辆的动态设计性能更具有普遍性。
轨道车辆动力学系统的模态在1 Hz附近较密集,运用传统辨识算法及工况模态辨识算法计算量较大,并且即使在已知输入的实验室条件下,也不能有效辨识这些密集且大阻尼比的模态参数。
子空间辨识数值算法(N4SID)是利用新增输入输出数据对在线估计系统参数矩阵进行的一种辨识算法。N4SID不关心被辨识系统的模型结构形态,仅需给定模型的阶数(该阶数可在辨识过程中观察矩阵的奇异值获得),无需求解复杂非线性优化函数,采用奇异值分解(SVD)和正交三角(QR)分解的线性代数算法,避免了叠代算法中收敛、局部最小及初始条件敏感等问题,从而广泛应用于辨识领域[3]。
本文主要研究运用N4SID算法通过辨识直接获得系统的状态方程,通过对系统矩阵进行特征值分解获得模态参数,然后运用稳态图来保留真实系统的物理极点,运用所编制的程序对仿真模型进行辨识分析。
1N4SID
N4SID一般包含3个步骤[4]:①运用SVD和QR分解对输入输出数据Hankel矩阵进行投影运算,得到投影矩阵Oi,同时确定系统的阶次n;②估计求解出拓展可观测矩阵Γi、或者卡尔曼滤波状态序列估计i;③确定系统的参数矩阵A、B、C、D。
当m阶输入、l阶输出的n阶系统矩阵为线性时,不变系统的离散状态空间模型可表示为

式中:
k——采样时刻;
A——系统状态矩阵,为n阶方阵;
B——输入分配矩阵,为n×m矩阵;
C——输出矩阵,为l×n矩阵;
D——直接输出矩阵,为l×m矩阵;
vk——测量噪声,vk∈Rl;
wk——过程噪声,wk∈Rn。
当输入未知时,可假设确定性输入为0,此时系统状态空间模型不包含B、D矩阵,模型退化为随机子空间模型。定义输入数据的Hankel矩阵为

式中:
i——矩阵行数的1/2;
j——矩阵列数,Hankel矩阵U0|2i-1中,i=j;
Up——过去输入矩阵,是U0|2i-1的分块矩阵;
Uf——将来输入矩阵,是U0|2i-1的分块矩阵。
n×j阶状态序列Xi为


依据以上定义,对
式中:
Ya|b——第1列第1个元素为a,且第1列最后1个元素为b的分块矩阵。
于是,由“将来”输入行空间到“过去”输出行空间的投影矩阵为
其中
式中:
LUp——L矩阵的过去输入矩阵;
LUf——L矩阵的将来输入矩阵;
LYp——L矩阵的过去输出矩阵。
由式(7)可以求出 LUp、LUf和 LYp。
依据假设条件可知
Qi= Γii(8)
式中:
i——卡尔曼滤波状态序列Xi的估计。
对式(6)右侧第1项进行奇异值分解,依据奇异值分布设定系统的阶数,然后对奇异值矩阵进行分
块为S1和S2的直和,其形式如下。

式中,ρw、ρv为残差矩阵。
2 车辆模态参数的辨识及分析
由于车辆力学模型的模态参数可通过理论分析准确获得,所以采用仿真模型不仅可验证辨识算法的有效性,还可方便地模拟量测噪声信号,以便于分析噪声信号对辨识精度的影响[5]。本文运用轨道交通车辆的6自由度垂向动力学模型来校验算法及所编制辨识程序的有效性。该6自由度车辆的垂向动力学模型如图1所示。
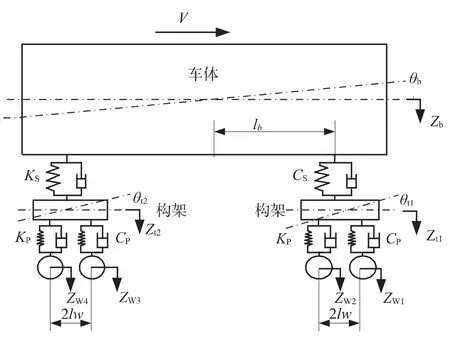
图1 客车垂向动力学模型图
根据图1模型,结合上述子空间辨识算法理论,运用影响系数法建立动力学方程,选取状态矢量,将动力学方程转为状态方程,依据采样时间对连续系统的状态方程离散,即可获得形如式(1)的状态空间模型。在Simulink/Matlab软件环境下建立仿真模型如图2所示。
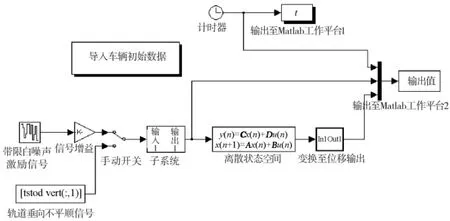
图2 车辆自由度数为6的垂向Simulink模型图
在辨识算法研究中,客车动力学模型参数选自某典型客车,离散模型的时间步长为0.005 s(采样频率为200 Hz)。本文分别运用带限白噪声信号、轨道谱反演的轨道不平顺信号及确定性的扫频信号作为轨道的垂向不平顺输入,并考虑了轮轴输入的时延,以车体中部、心盘处,以及每个构架的中部、端部共9个测点处的垂向位移作为系统的输出,对所编制的程序进行了校验。辨识结果表明,当运用不包含噪声信号的仿真数据进行辨识时,在各种输入信号下,均能获得与理论模态基本一致的高精度辨识结果。
为了分析噪声对辨识精度的影响,当输入为白噪声信号时,在输出信号上叠加了均方根值为原信号1%和5%的零均值、正态分布噪声信号(以下分别简为“1%噪声”及“5%噪声”)得到辨识结果如表1所示。辨识结果表明:N4SID算法辨识精度极高,但噪声信号越强,辨识精度越低。若想提高辨识精度,必须增加所采用的输出数据点数,但计算时间随之增加。表1中在5%噪声信号下的分析结果运用了35 s长的输出数据才能得到与在1%噪声信号下、15 s长数据相当的辨识精度。
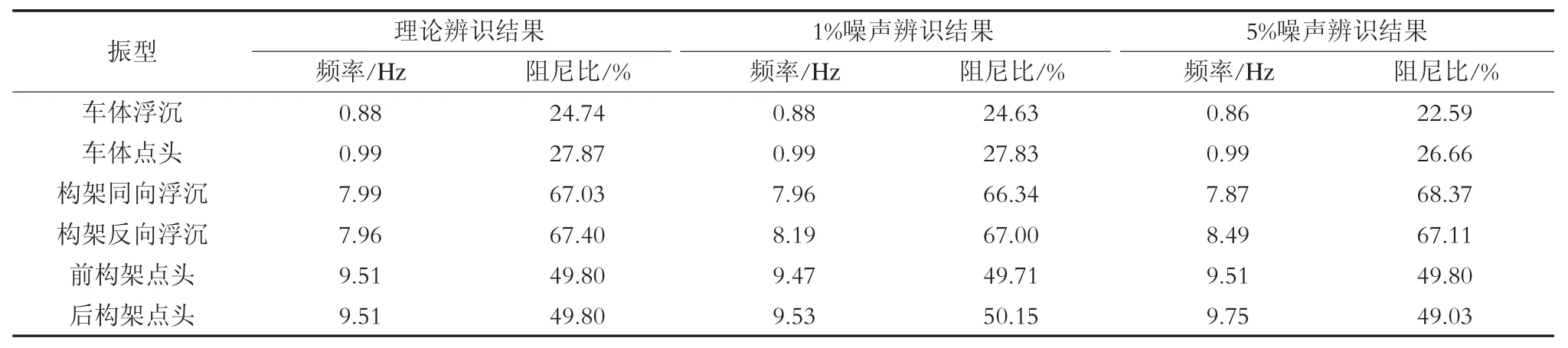
表1 车辆模态参数N4SID算法辨识结果
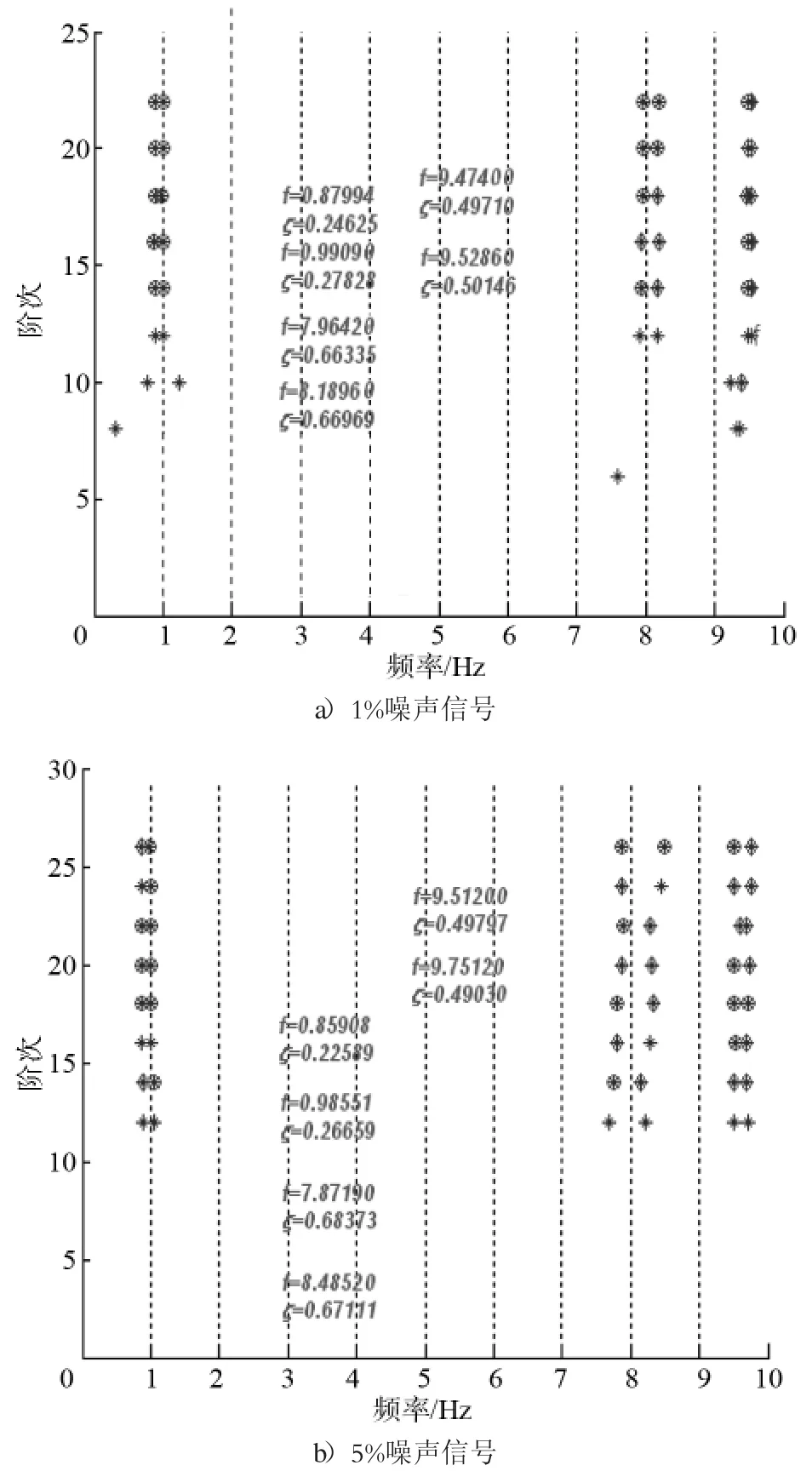
图3 N4SID的稳态图
图3为车辆存在1%噪声和5%噪声信号时,为了挑选稳定的系统极点所绘制的稳态图。绘制稳态图的准则是特征频率的变化率不大于1%、阻尼比不大于8%、振型矢量不大于2%。图3表明:在1%噪声信号辨识时,较早获得稳定的极点,并且识别的精度较高。
在实验室条件下,虽然构架和车体的位移响应可通过测量获得,但是位移的测量往往比加速度的测量复杂很多。经分析,从轨道不平顺至车辆位移及加速度响应的状态方程中可知,A、B矩阵完全相同,C、D矩阵不同。因此将加速度响应作为系统输出,如能辨识出系统矩阵A,将获得位移输出相同的系统极点,并具有相同的振型频率和阻尼比。本文运用构架及车体仿真加速度输出信号进行辨识时发现:当输出信号没有噪声时,仍可精确地辨识出车辆系统的模态参数;但将上述1%噪声信号及5%噪声信号加入后,无论是随机输入信号、轨道谱反演信号还是扫频信号都无法获得良好的辨识效果。在6级轨道谱反演数据输入时,没有噪声和有1%噪声信号情况下的辨识结果见表2。
从表2可以看出:没有噪声信号时,辨识结果基本与理论模态精确一致;有1%噪声信号时,虽然辨识结果也具有较高精度,但未能辨识车体的点头振型;当有5%噪声信号时,只能辨识出构架的点头振型,而不能有效地辨识车辆的点头及浮沉振型。

表2 轨道谱反演输入时运用车辆加速度响应的构架及车体辨识结果
在线路运行条件下,轨道不平顺测量比较困难。分析车辆的动力学方程可以看到,车体振动完全由构架输入所产生,故可将构架作为输入来辨识车体的模态参数。由于构架位移至车体位移响应与构架加速度至车体加速度响应具有相同的传递函数,因此本文也研究了运用构架加速度输入和车体加速度输出辨识车体模态参数的效果,辨识结果如表3所示。
从表3可以看到:当噪声信号很低时,以构架加速度为输入可完整地辨识出车体的振型,并且辨识精度很高;当噪声信号增强时,辨识精度随之变差,但比表2分析结果稍好。此次分析辨识出了点头振型,而且辨识精度稍高。
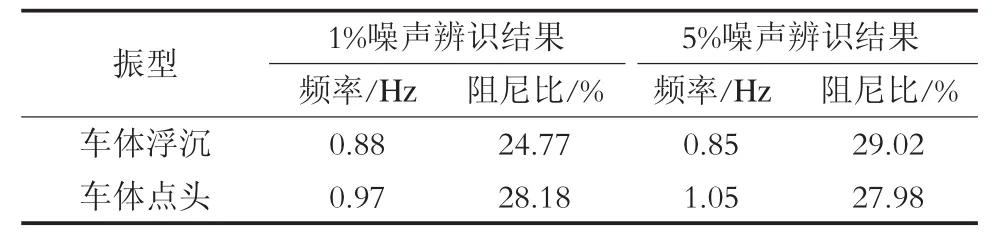
表3 轨道谱反演输入时以构架加速度响应为输入的车体辨识结果
3 结语
本文运用N4SID算法对轨道车辆垂向仿真模型进行了模态参数辨识研究。如以车体和构架的位移响应作为系统输出,并以轨道不平顺为随机输入、轨道谱反演时域不平顺输入及确定性信号输入,则即使噪声信号较大,仍均能获得良好的识别效果。当以仿真模型的加速度输出进行辨识时,若输出信号没有受到噪声污染,则能获得精确的辨识结果;若输出信号加入了模拟的噪声信号,则只能识别出较高频率的模态参数,识别精度也相应受到噪声信号的影响。如以构架加速度作为输入,以车体振动响应作为输出,则在噪声信号低于5%时,仍能有效识别出车体的振动模态参数。
[1] 周劲松,张洪,任利惠.模态参数在铁道车辆运行平稳性研究中的运用[J].同济大学学报(自然科学版),2008,36(3):383.
[2] Bart P,Buido D R.Stochastic System Identification for Operational Modal Analysis:A Review,Journal of Dynamic Systems[J].Measurement,and Control,2001,12(123):659.
[3] 黄金峰,张合新,胡友涛,等.基于有限记忆变遗忘因子的子空间辨识算法[J].控制理论与应用,2012,29(7):893.
[4] 李冬冬.基于子空间辨识算法的压电悬臂梁振动主动控制研究[D].兰州:兰州理工大学,2014.
[5] 沃德·海伦,斯蒂夫·拉门兹,波尔·萨斯.模态分析理论与试验[M].白化同,郭继忠,译.北京∶北京理工大学出版社,2001.
