基于三维激光扫描的动态沙方量测量及点云修正
2018-04-27王堃宇高龙山寇晓强徐颖
王堃宇 ,高龙山 ,寇晓强 ,徐颖
(1.天津大学水利工程仿真与安全国家重点实验室,天津 300350;2.天津大学建筑工程学院,天津 300350;3.中交天津港湾工程研究院有限公司,天津 300222)
0 引言
在水利和港口工程建设中,往往需要输送大量的沙土,如何获得现场信息并对运沙船运输方量进行监测计算十分重要。目前,国内外离船实现对动态船舶吃水实时检测的研究仍处于起步阶段,尚无相关设备投入使用[1],国内现有的船舶吃水检测主要通过人工目测,通常在船舶靠岸或者锚泊时进行,并且当前船舶标准化程度低,导致吃水检测既耗时又不准确[2]。此外还有使用压力传感器[3]、超声波测量[4]、电子水尺[5]、激光水位计[6]等的方法[7],但成本高、对环境要求苛刻、精确度不高等因素都限制了这些测量方法的推广,同时检测数据无法存档和记录现场实际情况的问题也逐渐突出,因此急需寻找快速准确的沙方量测量方法。
三维激光扫描技术凭借着获取数据速度快、成果精度高、非接触测量和可以数字化建档等诸多优势,为沙方量测量提供了新的可能。三维激光扫描技术于上世纪90年代中期出现于西方国家,由激光雷达技术发展而来,现阶段在数据采集和测量方面有诸多典型案例[8-11],说明通过三维激光扫描技术进行静态体积测量是可行的。
在动态测量数据处理方面,傅立叶变换是应用较为广泛的方法[12-13]。但该方法较为复杂,需要获得每个扫描点的时间信息,而三维激光扫描仪所发射的激光束在同一时刻可获得大量数据点,难以转换为傅立叶变换所需要的非连续时域信号。
综上所述,已有三维激光扫描实验均在静态理想状态下进行,将该技术运用于动态条件下的体积测量的案例还未涉及,然而在某些实际测量条件下必然会存在物体运动或动态扰动。因此尝试开展基于三维激光扫描的动态监测方法具有实际意义。本文以沙方量测量为例,将该技术应用于波浪扰动下的沙方量动态测量,提出使用曲面拟合的方式修正波浪扰动带来的误差,以满足工程中对动态测量的需求。
1 室内实验
实现沙方量动态测量方法意义重大,而测量精确度则是该方法可以推广的重要前提,本文分别从静态测量、波浪扰动测量两部分设计实验。本文所使用3D激光扫描系统为天津大学岩土工程研究所的FARORLaser Scanner Focus3DX 330(后简称Focus3DX 330),并配置有特殊反射率材料制成的球形标靶。
实验中所用模型船比例尺为1∶40,将4个球形标靶按照严禁遮挡、严禁共线、位置稳定、高度差适中的原则布置在空船附近。为保证船内部不出现扫描盲区,从多个角度对空船进行扫描,每次扫描均包含4个球形标靶。
1.1 静态标定实验
为验证Focus3DX 330在测量沙堆等材料堆积体积时的精度,将模型船放置在室内使其保持稳定,装载已知方量的沙堆后进行扫描。
首先在空船中加载4 L干沙,进行第1次扫描,之后每加载2 L干沙扫描1次,直至最后1次扫描时共装载10 L干沙。
实验模型船见图1。

图1 室内静态实验Fig.1 Indoor static experiment
在使用量筒测量干沙以及将干沙转移至空船的过程中,均使干沙保持自然堆积状态,不采取人工压实措施。
1.2 波浪扰动实验
在验证Focus3DX 330精度后,为模拟船体在水中的真实情况,将在三维激光扫描过程加入波浪扰动,实验在中交天津港湾工程研究院有限公司的造波装置中进行,如图2所示。
图2 造波装置Fig.2 The wave maker
本次实验保持在同一位置进行3次重复扫描,波浪扰动依次增大,波高分别为3 cm、4 cm、5 cm。在实验过程中对船体施加外部约束模拟抛锚状态,保证船体不会离开静态平衡位置,仅在原地随波浪晃动。此外,实验进行过程中需要避免由于沙堆与水接触而导致沙堆方量改变。
2 数据处理与误差分析
数据处理分为前处理和后处理两个过程,分别由Scene和3DReshaper软件完成。
首先处理空船的扫描点云,使用Scene提取球形标靶坐标信息,对不同角度的扫描点云进行定位,在手动删除周围环境点及噪点后,将仅保留下来的不同角度的空船点云置于同一坐标系下进行拼接,得到完整的空船点云。
之后将沙堆的扫描点云导入Scene中进行前处理,仅保留所载沙堆表面点云,修整后的扫描点云与处理完成的空船扫描点云进行拼接,生成.xyz格式文件为后处理做准备。
后处理过程将.xyz文件导入3DReshaper软件,按照点间距过滤噪点和孤立点,防止干扰后续网格的生成。3DReshaper在网格化过程中自动筛选一定量适于操作的点,相互连接形成三角形网格,网格大小通过调整点间距控制。最终可直接提取封闭网格所包含的体积,即沙堆方量。
2.1 静态标定实验误差分析
4次静态实验数据处理后的导出图像如图3所示。
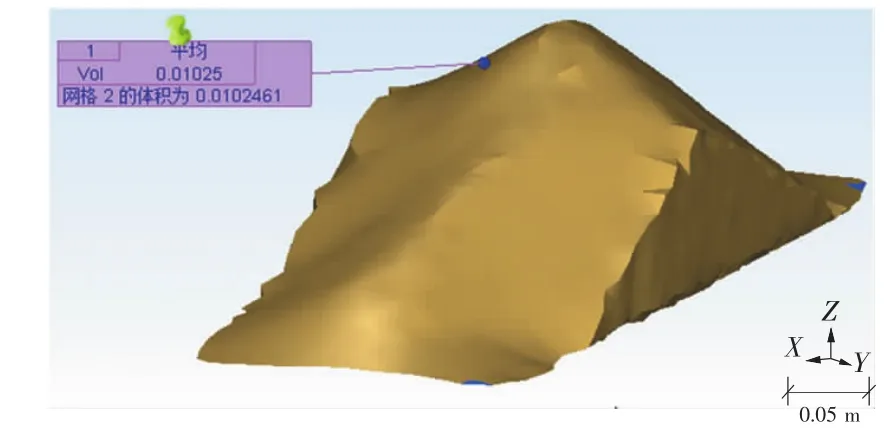
图3 静态标定实验结果Fig.3 Results of static calibration test
网格还原了静态条件下平滑的沙堆表面,由于3DReshaper所使用的网格为三角形,故在转角处形成了部分锯齿形起伏。方量及误差见表1。

表1 静态标定实验数据汇总Table 1 Data of static calibration test
静态实验体积测量平均相对误差为2.57%,且较为稳定,能够达到误差不大于3%的实际工程要求,误差来源主要分为:
1) 仪器误差,根据Focus3DX 330参数,在25 m范围内扫描所得的点位误差为2 mm,同时在测量干沙体积时,量筒本身存在0.3%的误差;
2)拼接误差,沙堆表面与船体内部面形成封闭空间时造成的误差;
3) 点云网格化过程中在稀疏的部分采用插值,不可避免的在其中使用了误差点,此外三角形网格在沙堆边缘还原沙堆自然堆积状态时存在误差;
4)沙堆堆积状态改变带来误差,沙从量筒中向模型船中转移会改变沙堆的堆积状态,使实际体积与测量体积不一致;
2.2 国内现状 近几年,国内假肢矫形器生产企业在3D打印技术方面也在进行着积极的探索。湖北省康复辅具技术中心于引进华科三维HKP500工业级3D打印机,利用丰富的3D数字化平台和先进的康复辅具设计制造工艺,将3D打印技术应用到康复辅具行业,研发出了3D打印透气性接受腔一体化小腿假肢、3D打印脊柱矫形器、3D打印弹力仿生脚等系列产品,让3D打印技术惠及到更多的残疾人。西安南小峰脊柱矫形工作室和德国的Weiss博士合作,成功制作出了国内首例3D打印脊柱侧弯支具。浙江省社会福利中心与杭州电子科技大学3D打印中心合作,为杭州市儿童福利院的小朋友穿上了3D打印踝足矫形器。
5) 偶然误差。
2.2 波浪扰动实验误差分析
原始点云处理及数据提取过程与静态实验数据处理过程相同,波浪扰动实验测量结果及导出图像如图4所示。

图4 波浪扰动实验结果Fig.4 Results of the wave disturbance experiment
沙堆表面应为平滑曲面,由三次网格图像可以明显看出,波浪扰动导致点云严重失真,失真程度随波浪扰动增大而增大。图4中已可看出船体轴线垂直于波浪运动的方向受影响最大。方量及误差见表2。

表2 波浪扰动下沙方量测量实验结果汇总Table 2 Experiment results of sand volume measurement under the dynamic disturbance
波浪扰动下的体积测量平均相对误差为5.37%,均大于静态标定实验误差值,且超出误差不大于3%的工程要求,除了和静态测量实验相同的误差来源外,说明波浪造成的动态扰动不可忽略,需要探寻新的点云处理方法,使其精度大于通过扫描点云网格化形成封闭空间并测量体积的方法。
2.3 误差修正
波浪中船体的运动分为平动和转动,均分别沿x、y、z三个方向。由于造波频率和扫描仪水平方向旋转频率均远小于扫描仪竖直方向旋转频率,且竖直方向旋转一圈消耗时间极短,故可认为三维激光扫描仪竖直方向每旋转一圈所采集的是船体在水中晃动过程中某个瞬时所处位置的点云,简称瞬时点云。为说明误差修正原理,将船体简化为长方体,辅以示意图5进行说明。
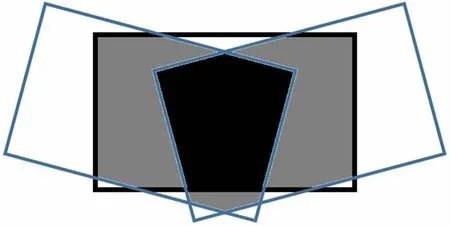
图5 点云示意图Fig.5 Sketch map of the point cloud
图5为最终获得的点云数据在xz平面上的投影,是扫描所得的全部点云。中间黑色矩形边界框为扫描对象静止稳定状态,灰色矩形边界框为晃动幅度最大的两个瞬时状态。以不同颜色标明各个区域的点云密度,每次扫描过程中分辨率和质量固定不变,黑色部分点云密度最高,在波浪扰动下由所有瞬时点云重叠形成;白色部分点云密度最低,为未重叠点云;灰色部分密度中等,在波浪扰动下部分点云重叠形成。可见,除了黑色部分必须保留外,灰色和白色部分均需要有选择的删除和保留,如何在点云密度相同的情况下对灰色和白色部分进行过滤是后期处理中出现的难题。
在进行修正之前,3DReshaper只能通过连接已有点或在已有点之间进行插值形成网格。插值的目的是估算出基准数据之间各点的函数值,因此所得曲线要尽可能穿过基准数据,而拟合是为了得到曲线或曲面,用以最好地表现夹杂噪声的测量数据,但不要求拟合曲线穿过这些测量数据[14]。在图5中可表示为,已知静止稳定状态点云应为矩形,则通过矩形来拟合所得点云,以去除噪点并得到最合适的矩形作为最终结果。
2.3.1 静态测量结果修正
为验证曲面拟合的适用性,对静态标定实验点云数据进行拟合,计算并对比所得体积值。分析沙堆在自然堆积条件下的表面形态,选取二次曲面进行描述最为合理。过滤后的点云以.asc文件格式导出并导入Matlab中使用SurfaceFittingTool进行拟合,坐标系内分析x、y、z之间关系后,二次曲面函数形式选取为:

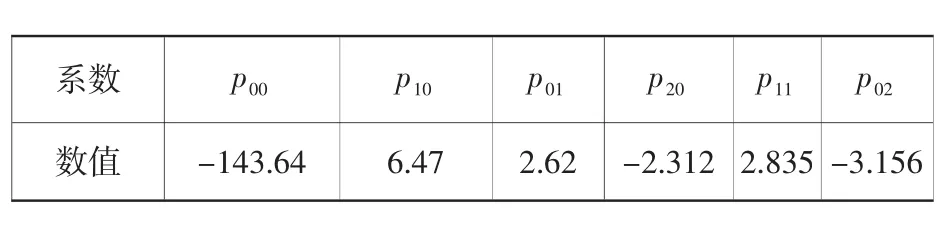
表3 验证实验拟合参数Table 3 Fitting parameters of confirmatory experiment
将原始点云的x、y值代入拟合所得函数,所得点集即为拟合点云。
静态标定实验所得点云满足工程要求,可作为真值进行参考,综合考虑误差平方和、确定系数、调整确定系数以及标准差(表4)可知,使用二次曲面拟合静态标定实验点云结果良好。

表4 验证实验质量指标Table 4 Fitting quality index of confirmatory experiment
在此基础上,继续计算拟合后的沙堆体积值进行验证,对拟合得到的沙堆表面方程在给定区间内进行定积分,实验中所用模型船内部表面规则,相邻表面相互垂直且均与底面垂直,故体积计算公式及结果如下:

式中:a、b、c、d为积分边界;zmin为z的最小值,所得结果相对误差满足实际工程误差小于3%的要求,同时与静态标定实验中,测量10 L沙堆时的结果相差0.20%,即拟合精度为99.8%。说明二次曲面拟合用于点云修正是可行的。
2.3.2 动态测量结果修正
验证二次曲面拟合的适用性后,将该方法用于波浪扰动下的点云修正,图6为导入的原始点云,可见原本平整的沙堆表面由于波浪扰动出现起伏。
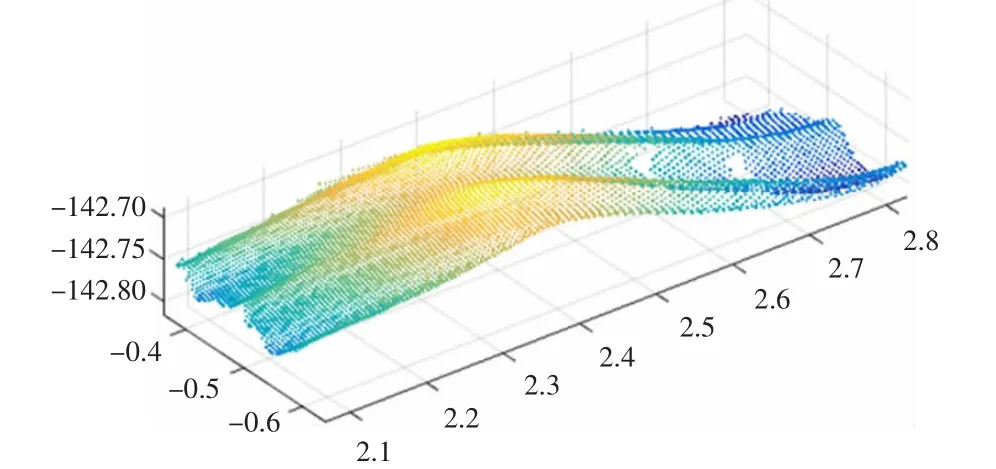
图6 过滤点云(m)Fig.6 Point cloud after filtering(m)
拟合方法与前述验证过程一致,所得拟合参数值见表5。

表5 曲面拟合参数Table 5 Surface fitting parameters
与前述拟合结果的评价方式有所不同,由于波浪扰动的存在,动态扰动实验点云本身具有较大误差,拟合质量(表6)好坏不能完全参照原始点云,若过分追求好的拟合质量指标,得到的结果必定是病态的。

表6 曲面拟合质量指标Table 6 Surface fitting quality index
此时应计算出拟合后的体积值与静态实验进行比较。将x、y值代入拟合方程后,得到修正后的沙堆表面如图7所示。

图7 修正点云(m)Fig.7 Modified point cloud(m)
体积计算方法与验证过程一致,修正后的沙堆体积V=10.297 L,修正后体积相对误差e=满足实际工程误差小于3%的要求,说明动态误差修正有效。修正后结果与静态实验相比仍有差距,主要原因是二次曲面在描述不规则的沙堆表面存在误差,以及在晃动过程中造成的沙堆形状轻微改变。二次曲面拟合是众多拟合形式中的一种,如何找到与不同实际工程对应的拟合形式,以及在置信区间内调整参数以减小误差,是后续研究的重点。
3 结语
1)由静态方量测量实验结果可知,三维激光扫描仪测量沙方量误差较为稳定且能达到工程实际要求,用于沙方量测量是可行的。
2)由动态扰动下方量测量实验结果可知,波浪扰动会使扫描结果严重失真,失真程度随扰动增大而增大,且对体积测量造成的误差不可忽略。
3)通过拟合静态标定实验所得点云,验证了二次曲面拟合在点云误差修正中的适用性,所得图像和体积值均与静态实验接近。将该方法应用于波浪扰动下的点云修正,效果良好,不仅较好地还原了真实的点云图像,修正后的误差也达到了实际工程的要求,证明了修正方法的可行性。
参考文献:
[1] 熊木地,朱四印,李禄,等.通航船舶吃水实时检测系统数据处理方法研究[J].仪器仪表学报,2012,33(1):173-180.XIONG Mu-di,ZHU Si-yin,LI Lu,et al.Research on data processing method of real-time detection system for dynamic ship draft[J].Chinese Journal of Scientific Instrument,2012,33(1):173-180.
[2] 周达超.船舶吃水量信息采集处理系统的研究[D].大连:大连海事大学,2010.ZHOU Da-chao.Research on ship draft information collection and process system[D].Dalian:Dalian Maritime University,2010.
[3] 王智孝,玄相本.一种用微型计算机控制压力传感器测量“动态吃水”方法的研究[J].海洋科学进展,1988,6(3):68-73.WANG Zhi-xiao,XUAN Xiang-ben.A study on the method of measuring motional water line with a microprocessor controlled pressure sensor[J].Advances in Marine Science,1988,6(3):68-73.
[4] 叶家玮,郑灼辉,陈一波.超声波船舶载重量测量仪精度评估及相关技术[J].武汉理工大学学报:交通科学与工程版,1994,18(3):293-300.YE Jia-wei,ZHENG Zhuo-hui,CHEN Yi-bo.Error analysis of ultrasonic instrumentfor measuring ship carring capacity[J].Journal of Wuhan Transportation University,1994,18(3):293-300.
[5] 刘晓艳,芮雪,刘小勇.基于正交多项式作最小二乘曲线拟合的水位流量率定系统设计与实现 [J].新疆农业大学学报,2009,32(3):86-90.LIU Xiao-yan,RUI Xue,LIU Xiao-yong.Design and realization of stage-discharge relation system based on least square curve-fitting of orthogonal polynomials[J].Journal of Xinjiang Agricultural University,2009,32(3):86-90.
[6] 盖志刚,赵杰,杨立,等.一种新型激光智能水位测量系统的研制[J].光电子·激光,2013,24(3):569-572.GAI Zhi-gang,ZHAO Jie,YANG Li,et al.Development of a new laser intelligent water level measuring system[J].Journal of Optoelectronics·Laser,2013,24(3):569-572.
[7]钟辉.三峡通航船舶吃水远程监测与预警系统的研究[D].大连:大连海事大学,2011.ZHONG Hui.Research on the three gorges ship draft system of remote monitoring and early warning[D].Dalian:Dalian Maritime University,2011.
[8] WULF Oliver,WAGNER Bernardo.Fast 3D scanning methods for laser measurement systems[J].Key Engineering Materials,2005,295-296(1):735-740.
[9]CHEN F,BROWN G M,SONG M.Overview of three-dimensional shape measurement using optical methods[J].Optical Engineering,2000,39(1):10-22.
[10]王金涛,刘子勇,张珑,等.大型油罐容量计量中3D空间建模方法研究与比对实验分析[J].仪器仪表学报,2010,31(2):421-425.WANG Jin-tao,LIU Zi-yong,ZHANG Long,et al.Research on 3D laser scanning method for tank volume metrology and its comparison experiment analysis[J].Chinese Journal of Scientific Instrument,2010,31(2):421-425.
[11]邵学君.铁路罐车(箱)容积三维激光扫描测量方法[J].中国铁道科学,2014,35(2):79-85.SHAO Xue-jun.3D laser scanning measurement method for the volumn of railway tank car(container)[J].China Railway Science,2014,35(2):79-85.
[12]LEGARDA-SAENZ Ricard,RODRIGUEZ-VERA Ramon,ESPINOSA-ROMERO Arturo.Dynamic 3-D shape measurement method based on quadrature transform[J].Optics Express,2010,8(3):2 639-2 645.
[13]SU Xian-yu,CHEN Wen-jing,ZHANG Qi-chan,et al.Dynamic 3-D shape measurement method based on FTP[J].Optics and Lasers in Engineering,2001,36(1):49-64.
[14]乐亚南.基于曲线拟合理论的点云数据处理分析[D].成都:西南交通大学,2015.LE Ya-nan.Processing and analyzing the point cloud data based on the curve fitting theory[D].Chengdu:Southwest Jiaotong University,2015.
