抓斗船精挖计算机测控系统
2018-04-27刘国生曹湘波刘烈晖许向东张继潮韦纪军
刘国生,曹湘波,刘烈晖,许向东,张继潮,韦纪军
(中交广州航道局有限公司,广东 广州 510300)
0 引言
港珠澳大桥沉管隧道基槽精挖质量验收指标远远超出了现行的疏浚工程和水运工程规范要求,水下46 m的基槽精挖高程控制,直接受“纵向坡型+横向坡型+潮位+挖泥设备固有误差+海况扰动”等多种垂直动态变化量影响,呈现出复杂的实时高程测量计算关系,常规技术和设备均难以满足隧道基槽开挖质量要求[1-9],承担该工程施工的“金雄”30 m3抓斗挖泥船就存在以下问题有待解决:
1)挖泥定深控制设备是以人工方式预置抓斗设定深度值R,并且没有RTK、潮位基准数据直接输入接口,因此无法自动解算抓斗定位高程动态改正值。
2)不能实时补偿高程波动干扰及船舶海上施工受到的环境扰动。
3)定深设备综合测量和控制误差值,在基槽精挖允许误差范围内(0~50 cm)贡献比例过大,例如:仅缆长测量传感器系统的误差等级为±10 cm,预置设定深度值装置的分辨率也为±10 cm,因而留给下道挖泥工序的可用基槽精挖偏差余量太少。
4)船员基本没有参与类似工程经历。
5)若以常规设备操作和运行方式进行精挖施工,存在挖泥操作工序复杂、质量控制困难、施工效率低等问题,还会增加船员工作强度,或要求船员具有更高的现场操作技能。
为此需对“金雄”30 m3抓斗挖泥船进行适用性技术升级与改造,研发抓斗船精挖计算机测控系统。
1 系统设计思路与方案
由抓斗船精挖计算机测控系统接管或替换原船挖泥定深控制设备,将抓斗挖泥船模拟为1台精密数控机床,其刀具是抓斗,可按基槽设计图纸要求的形状和尺寸,高效实施海底基槽精准成型“精密加工”工艺。
该系统是一个分布式的计算机测控系统,由传感器、通讯网络、工控PC计算机、软件算法、微控制器、PLC、传感器接口电路、机电一体化命令执行驱动装置等组成,如图1所示。

图1 抓斗船精挖计算机测控系统构成示意图Fig.1 The schematic diagram of the computer control system for the grab bucket dredger
抓斗船精挖计算机测控系统由两个主要部分组成:1) GIS电子图形系统;2) 抓斗运动控制系统。
两个系统间通过通信网络,交互提供船体空间定位信息和挖泥设备运行工况信息。系统实现目标如下:1)冗余获取RTK和潮位站高程基准信息;2) 数字地形拟合与图形显示;3) 抓斗运动直接数字闭环控制DDC:修正各类偏差与干扰,抓斗定深精度<50 cm;4)深基槽精挖施工过程可测、可视、可控;5)挖泥操作程序化、数字化、智能化;6)改善挖泥设备运行平稳性,增强工程质量可控性;7)工程质量优先,兼顾高的综合施工效率。
2 主要功能
2.1 地理信息图形显示系统
1)自动寻深:根据基槽施工区域的设计水深文件和测量水深文件,每次抓斗旋转至待开挖坐标(x,y)位置上方时,立即计算出抓斗开挖目标点的空间坐标(x,y,z),并输出到抓斗运动控制系统,实现数字化施工。
2)施工作业平面定位与导航:显示和记录当前船位及抓斗挖泥平面移动轨迹。
3)断面和水深图数据,显示开挖前、后的泥层状态。
4)水下作业区域可视化:显示斗齿挖掘运动轨迹曲线。
5) 显示船体x,y,z空间姿态及挖泥现场实际工况。
6)引导精确(排)布斗位,提高移船效率。
7)辅助施工指挥管理,组织工艺实施。
8)非自航船海上调遣安全监督。
GIS电子图形系统,是在GIS地理信息系统平台上开发完成的,充分利用了GIS空间测量与计算、信息处理以及多图层显示等功能特性。该系统是一个开放性平台,可兼容处理各类流行的图形和地理信息文件,利于今后系统技术升级和移植推广和与其他第三方信息系统对接。
2.2 抓斗精挖高程参考基准冗余方案
抓斗船远海基槽精挖过程中,完全依赖于高程参考基准来满足高精度指标要求的系统定位导航、姿态测量、施工监测、抓斗闭环控制等,必须保证获取的参考高程基准数据有效性、持续稳定,对此系统采取了以下措施:
1) 同时接收RTK(港珠澳大桥工程统一的CORS系统信号)和海上潮位站两类基准数据,高程计算时,以RTK数据为主,潮位数据为辅,互为冗余,由识别算法自动选择。
2)利用正确的RTK基准高程数据,校准潮位站可能产生的分带偏差,保障潮位测量精度和有效性,以备作为RTK基准异常时间段的替代参考高程基准。另外,通过对两类高程基准进行实时数值比对,判断此刻高程基准原始数据适用性。
3)抓斗船可通过单一数传通讯链路,向外广播发布这些可信度高、传输协议兼容性好的远海高程参考基准数据源。
3 抓斗运动控制系统
精挖直接数字控制系统(DDC系统)利用分布式计算机强大的实时运算能力,实现对抓斗精挖施工过程直接数字闭环控制方案,系统控制流程如图2所示,闭环控制模型如图3所示。

图2DDC系统控制流程图Fig.2 The control flow chart of the DDC

图3 DDC系统闭环控制模型Fig.3 DDC closed-loop control model
3.1 DDC系统实现功能和目标
1)抓斗定深下放闭环控制算法:从GIS电子图形系统获得当前船体空间位置信息,并采集传感器数据,修正各类偏差与干扰,使抓斗定深精度<50 cm。
2)平整挖泥模式控制算法:精确控制抓斗闭合挖掘过程,实现精度指标范围内的挖掘效率最大化。
3)超深监控方案:强化质量监控,提高施工效率。
4)挖泥机具操作程序化、智能化、数字化:通过提高挖泥设备操作的自动化水平,弥补挖泥船定深设备自身不足,降低船员操作水平差异化影响,促进基槽精挖精度和平整度保持一致性或稳定性。
5)挖泥工艺参数修定:使抓斗船挖掘能力能更好适应不同土质特性或施工工况。
6)及时测量:系统自动识别记录每斗实际挖深坐标、装泥重量、时间等施工信息。回放这些数据,可及时评估施工现状。
7)水深测量系统校准:消除DDC传感器系统累积偏差,检验测量设备性能状态。
8)生产安全的监测:在线监测设备运行状态参数。
3.2 DDC系统3项关键技术
1)抓斗定深下放闭环控制算法
抓斗定深下放闭环控制的软件算法,通过把采集反映现场工况的传感器信息数据,与由GIS电子图形系统提供的抓斗目标定位信息数据进行动态比对计算处理,消除或修正偏差干扰,如图3所示,最后由机电一体化命令执行驱动装置,将抓斗驱动移位到指定坐标位置。如表1所示,列举了闭环控制所考虑的各种偏差情况和对应解决方法。
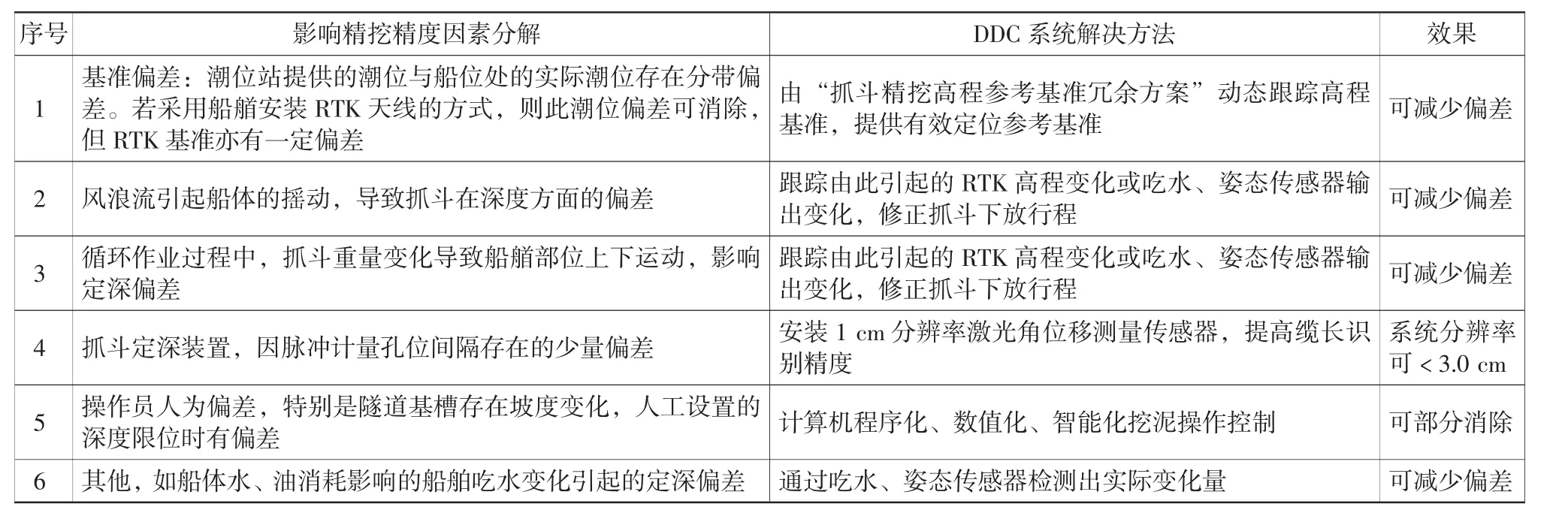
表1 抓斗定位偏差控制Table 1 The grab bucket positioning deviation control
2)平整挖泥模式控制算法
DDC系统将抓斗控制定位到指定坐标位置后,接下来的工序是闭斗挖泥,待闭斗到约占全开口尺度的28%后,接着DDC有两种闭斗挖掘模式可供选择,即:平整挖泥、定深挖泥。定深挖泥模式DDC系统不需要介入抓斗闭合挖掘过程,只监控是否超深,基槽精挖施工主要采用平整挖泥模式。
平挖模式是当抓斗挖掘到全开口尺度的28%,形成一个(R-18)cm的土坑后,DDC系统依据斗形运动特征函数(1)建立的控制算法模型,和挖掘区域当前泥质状况,动态调控抓斗沉降碟盘刹车力矩Pn,用至少16个重复步骤Sn,控制抓斗斗体一边下放一定的位移量Hn,一边同时闭斗挖掘,逐步削平28%后的72%由抓斗齿运动几何形状产生的挖掘泥面浅点土层,待抓斗完全闭合后,形成一块存在约±20 cm凸凹起伏相对平整的泥面,并与抓斗全开口尺度前28%段的泥面保持在同一水平高程,相对于定深挖泥模式,平挖模式能充分利用抓斗开口尺度,达到精度指标范围内的无浅点挖掘面积最大化。平整挖泥模式目标效果如图4所示,如图5所示展示了平整挖泥控制流程。由于Hn限定在±20 cm范围,所以DDC系统采用了分辨率≤2 cm抓斗位移的测量传感器,测量沉斗实际位移量Hn,保证平整挖泥模式高测控精度要求。

式中:xn表示斗齿的水平移动位置;yn表示斗齿的垂向移动位置;an表示抓斗侧向投影几何运动轨迹修正参数;n=1~16。

图4 平整挖泥目标效果示意图Fig.4 Flat dredge target effect schematic diagram
3) 超深监控方案
DDC系统中平挖工艺执行PLC的软件控制算法,利用分辨率≤2 cm抓斗的位移测量传感器数据,及接收来自GIS电子图形系统的船体空间定位数据,在线计算出斗齿当前的空间位置坐标,监测每步Sn挖掘斗齿是否超深,同时,DDC系统读取碟式刹车液压回路制动压力值,作为碟刹制动力矩与土质之相关性算法的输入变量之一,间接识别判断斗齿处土质,预测各步长Sn抓斗下沉位移量Hn,如发现斗齿轨迹超出±20 cm范围,立即发出制动刹车命令,阻止抓斗下滑(沉降),并终止本次闭斗挖掘。平整挖泥控制及超深处理流程如图5所示。
3.3 设定DDC系统运行工艺参数
隧道基槽各管节施工时,为使DDC系统适应环境变化,达到较优的控制效果,利用DDC的综合偏差调整功能,提炼出4个物理上容易理解的关键参数,供船长或工程管理人员结合施工经验合理设定及优化配置调整。
参数配置列表见表2。

图5 平整挖泥控制及超深处理流程示意图Fig.5 The schematic diagram of flat dredging control and ultra deep processing
4 结语
2011年4月2日抓斗船精挖计算机测控系统在沉管隧道基槽开挖工程中投入使用,经历了西人工岛E1段精挖两个工程节点,实际工作情况表明:抓斗垂直综合开挖精度<+30 cm的可信度达到95%(测试的最大挖深约19.5 m),每斗挖泥循环周期<4 min,能在可施工海况条件下,满足精挖工程质量指标要求。

表2 参数配置列表Table 2 Parameters configuration table
参考文献:
[1]JTS 257—2008,水运工程质量检验标准[S].JTS 257—2008,Standard for quality inspection of port and waterway engineering construction[S].
[2]JTJ/T 325—2006,淤泥质海港适航水深应用技术规范[S].JTJ/T 325—2006,Technical specification ofnauticaldepth applied to muddy harbour[S].
[3]GB/T 18314—2001,全球定位系统(GPS)测量规范[S].GB/T 18314—2001,Specifications for globa l positioning system(GPS)surveys[S].
[4]中交公路规划设计院有限公司.港珠澳大桥主体工程岛隧工程施工图设计[R].2011.CCCC Highway Consultants Co.,Ltd.Construction drawing of island and tunnel project of Hongkong-Zhuhai-Macao Bridge main project[R].2011.
[5] JTJ 319—1999,疏浚工程技术规范[S].JTJ 319—1999,The technical code of dredging engineering[S].
[6]JTS 258—2008,水运工程测量质量检验标准[S].JTS 258—2008,Standard for quality inspection of port and waterway engineering survey[S].
[7] JTJ 203—2001,水运工程测量规范[S].JTJ 203—2001,Specifications for port and waterway engineering survey[S].
[8] JTJ 213—1998,海港水文规范[S].JTJ 213—1998,Code of hydrology for sea harbour[S].
[9]港珠澳大桥管理局.港珠澳大桥施工及质量验收标准[S].2013.Hongkong -Zhuhai-Macao Bridge Authority.Construction and quality acceptance criteria for Hongkong-Zhuhai-Macao Bridge[S].2013.
