连杆机构预定轨迹设计及仿真
2018-04-27聂晶晶武汉商学院机电工程与汽车服务学院
聂晶晶 武汉商学院机电工程与汽车服务学院
在中国,连杆机构的应用可以追溯到两千年前,欧洲在中世纪也有对连杆机构的研究,例如张衡发明的地震仪,椭圆车削装置,都采用了平面连杆机构。在现代,连杆机构的应用日益广泛,如在仿生学上,连杆机构可以实现人类关节功能,在设计机器人四肢时,往往优先选择连杆机构。
在20世纪80年代,对连杆机构的研究主要集中在设计、运动规律、分析、廓线的综合等四个研究方向;到90年代,出现了大量的动力学、振动、优化设计、误差分析和CAD/CAM等研究论文;近些年,对平面四杆机构的共轭曲面原理、专家系统、动态仿真、可靠性分析也有了更多的研究。
1 连杆机构设计
四杆机构设计常用的方法有解析法、图解法和图谱法。解析法的精度比较高,但是由于连杆曲线是高阶曲线,建立方程的过程比较繁琐,计算量很大;图解法很直观,比较容易理解,但由于作图误差的存在不可避免,作图法的精度比较低;图谱法比较简单,但是图谱本身有限,不可能将所有的连杆曲线包含在内,因此也不能满足所有设计要求。
生产制造中要实现的连杆曲线轨迹是多种多样的,每次所给的限制条件和初始条件也不相同,按照常见设计类型将平面连杆机构的运动设计分为以下三类问题:
(1)要求所设计构件能够带动某一个构件经过给定的若干个位置坐标。
(2)按照事先确定的函数关系来设计从动件和主动件的运动关系(包括位置,速度和加速度)。
(3)要求所设计的连杆能够带动某杆上的某一点按照一个给定的运动轨迹(比如圆,椭圆,直线等)来运动。
平面连杆设计包括运动方法设计和运动尺寸设计。运动方法设计实在设计机械过程中,当工艺动作确定之后,选择适宜的连杆机构的结构形式,包括构件数目以及运动副的类型和数目。运动尺寸设计是在运动方案设计基础上,根据机构要完成的运动而提出的设计条件,确定机构运动简图及其参数。
矢量用于表示一个具有大小和方向的物理量。一个位移矢量表示了空间任意两点之间的有向距离。连杆机构中的每一根杆都可以看作是一个位移矢量,一断作为起点,另一端作为终点。这个杆长就是位移矢量的大小,而连杆的夹角规定为矢量与x轴正向间的夹角就是(逆时针为正)。
2 连杆机构计算
在工业中,为了实现某种特殊工艺要用连杆机构来实现一条确定的运动轨迹是常见的机械设计问题,常见于间歇机构和连续机构的设计中,能否准确的实现运动轨迹是工业控制能否精确控制的前提条件。因此,研究如何设计和实现连杆轨迹是非常实用的。、
现在设计一个如图所示一个曲柄摇杆机构,当AB整周旋转时,要求BC杆上的点E实现给定的运动规律,连杆机构如图中所示。

图1 连杆机构简图
在这里要确定的值有连杆机构中各杆杆长L1,L2,L3,L4,以及各杆初始角度θ1,θ2,θ3,以及连杆上的点E与BC杆的夹角ψ。在建立数学模型函数时,保证杆BC上E点的实际轨迹与给定轨迹之间坐标值误差均方根值最小,并设置曲柄摇杆机构存在的约束条件。用MATLAB软件编写M文件计算出四杆的杆长以及夹角。
计算得出的数据如下:
L0=51.7,L1=8,L2=53.6,L3=25.62,L4=22.7,θ1=38.65°。
根据曲柄连杆机构的结构得出初始角度如下:
(b)The endoscopic appearance of atrophic gastritis showed red and white mucosa,mainly white mucosa,the folds became flat or disappeared,and some mucosal blood vessels were exposed,which could be accompanied by particles or nodules.

计算得到θ3′=−82.24°; θ3′′′=69.65°;根据连杆运动机构的连续性,选择θ3=69.65°。
同理计算θ2
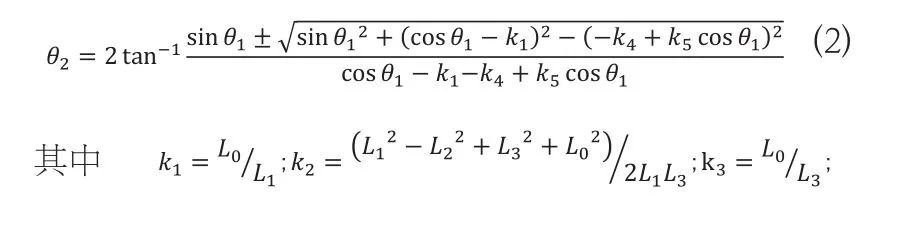
计算得到θ2'=-53.59°;θ2'''=43.87°;根据运动机构的连续性,选择θ2=69.65°。
使用Simulink仿真。
为了方便使用Simulink进行仿真,首先对连杆机构建立闭环矢量方程
对矢量方程求导,得到连杆机构运动的角速度方程。经过整理得到矩阵方程如下:

式(5)为连杆机构的数学模型。表示连杆机构四杆的位置关系,以及运动过程中各杆时间角速度的关系。

式(6)为连杆机构上BC杆上的一点E点的数学模型,表示了E点的x,y轴坐标值,φ角是E点与BC杆之间的夹角。
三、连杆曲线仿真
在MATLAB软件中编写M文件1.m和2.m分别描述连杆机构以及点E的数学模型。接着进入MATLAB软件中的SIMULINK仿真模块,调用之前编写的M文件并根据连杆机构的运动关系建立仿真模型。
设置仿真初始值,将θ1,θ2和θ3的角度改成弧度,θ1=0rad,θ2=0.766rad,θ3=1.2156rad。设置过程如下图所示:

图2 设置θ2 初始弧度

图3 设置θ3 初始弧度
在建立好仿真模型并设置好仿真的初始条件后,点击SIMULINK下拉菜单中的start按钮,软件开始仿真,设置好合适的XY绘图坐标区间以及取样时间,可以得到光滑连续的仿真曲线,该模型仿真曲线如下图所示:

图4 仿真得到的连杆曲线
可以看到与我们所要得到的轨迹曲线形似,但是仍然有很多误差。
3 总结
本文设计一个要求通过规定位置的连杆机构,通过MATLAB建模计算得到连杆机构的杆长以及初始角度后,使用SIMULINK模块对连杆机构上一点M点所经过的轨迹进行仿真,得到连杆曲线,得到的曲线与给定位置形似,但仍然有误差,后面将对误差产生的原因以及缩小误差的方法进行研究。通过研究发现,通过软件建模计算连杆机构,之后再进行仿真的办法要比传统的解析法实现起来更加简单,比图谱法更加灵活,可以根据设计需求不断修改数学模型,从而实现不同的连杆曲线运动轨迹。
[1]年大华,华志宏.连杆机构设计与应用创新[M].北京:机械工业出版社,2008.
[2]何珣,姚俊,张声.基于SIMULINK平面五杆机构运动学仿真[J].湖北工业大学学报,2014,29(4):18-22
[3]宋志强,基于 matlab 的平面四连杆机构优化设计[J]. 呼伦贝尔学院学报,2014,6:108-109