考虑维修力量影响及载荷动态分配的k/n系统模糊可靠性分析
2018-04-27黎放何有宸狄鹏陈童尹东亮
黎放,何有宸,狄鹏,陈童,尹东亮
海军工程大学 管理工程系, 武汉 430033
工程实践中,由于存在人员准备、故障检测及修理设备启动等环节,使得维修活动并不一定能立即开展,且复杂的外部环境及自身因素影响导致系统部件性能具有一定模糊性的同时,部件间的故障相关现象也对系统可靠性有着不可忽视的影响。
Murthy和Nguyen于1985年首次提出了故障相关这一概念[1],随后学者们对此开展了丰富的研究。目前,一般将故障相关分为3类[2-4]:Ⅰ类为故障传播,即某部件失效会以一定概率引发其余工作件失效;Ⅱ类为故障率相关,即某部件失效后会引发剩余部件的失效率增大,加速劣化进程;Ⅲ类为失效冲击损伤,即一个部件失效的瞬间对其余部件产生冲击,且具有累积性的现象,累积的损伤达到阈值即引发部件失效。国内方面,高文科等[5]以部件间存在Ⅰ、Ⅲ类故障相关且存在不完全覆盖情形的主辅并联系统为对象,建立了(T,N)预防性更换策略优化模型,并通过算例分析了故障检测、损伤累积等因素对系统可靠性的影响;周金宇和谢里阳[6]对存在共因失效的串并联不可修系统进行研究,分析了共因失效的发生与作用机理,采用载荷离散方法及概率发生函数相结合的思路建立了多状态系统可靠性定量评估模型;张卓琦等[7]在考虑Ⅱ类故障相关的基础上,研究了两部件系统的维修策略问题,运用更新过程理论建立了期望维修成本率解析模型,确定了最优维修策略。
值得注意的是,现有关于故障相关问题的研究较少考虑存在故障相关阈值的情形。实际上,系统部件失效后并不一定引起剩余部件劣化速度的加快,而是存在一定阈值,当部件承受载荷超过阈值时才会引发故障相关,导致失效进程加快。此类问题中,载荷分配较为常见,即系统将承受载荷按一定策略分配给系统中的部件共同承担。此类模型的特点是当某一部件失效后,系统会将此部件承担的载荷重新分配给其余工作件[8]。工程实际中存在此类载荷分配机制的系统较为普遍,例如机械系统中,多机械臂搬运物体的动态载荷分配[9]、基于载荷分布的电力系统优化[10]等。研究同型部件构成的k/n系统故障相关问题,考虑载荷平均分配的情形较为符合实际[8]。
此外,在进行常规可靠性研究的同时,学者们注意到由于长期运行导致劣化累积及外部环境等因素的制约,系统的状态性能水平及参数存在一定的模糊性,使得系统可靠性建模较为困难。针对这一问题,国内外学者以模糊数学为基础展开了研究。Ding和Lisnianski[11]首先提出了模糊多状态系统的概念,并引入了模糊通用发生函数研究系统性能水平和状态概率均为模糊数的多状态系统。鄢民强等[12]针对实际工程中多状态系统的性能及其概率分布无法准确获得和不完全覆盖的问题,利用模糊发生函数分析多状态系统并用截集的形式表示元件性能。涂春泰等[13]对含有旁联系统、冷贮备系统、热贮备系统、串并混联系统等子系统的大型复杂可修系统的模糊可靠性进行了研究,得到了模糊稳态可用度和模糊可靠度,Liu和Huang[14]就多状态系统部件性能和状态转移率均为模糊数的情况,利用模糊通用发生函数法分析了不可修模糊多态系统的可靠性,更进一步地,胡林敏[15]研究了部件失效转移率、修复转移率和状态性能水平均为模糊数的串并混联多状态系统,并提出了评估系统模糊可用度的新方法,此方法不需计算系统模糊状态性能水平与系统要求的总模糊性能水平差的隶属函数,从而可大大简化计算的复杂程度,Uprety和Patrai[16]运用失效次数和部件修复次数均遵循模糊指数分布的马尔可夫模型描述可修系统的可靠性,使用水平截集法,从传统的清晰集出发,得到了系统稳态指标隶属函数的截集区间,Garg[17]为了解决工业系统中存在的不确定性问题,建立了模糊状态的马尔可夫模型,使用Runge-Kutta方法评估了瞬时和稳态下的系统模糊可靠性,并通过改变系统的失效转移率和修复转移率对灵敏度进行分析,从而找出关键部件。
另一方面,考虑到部件参数及状态性能水平具有一定模糊性,可能造成故障不完全覆盖的情形。工程实践中,系统的冗余管理功能可能发生失效,导致系统无法正确地检测、隔离以及调整发生失效的冗余组件,进而可能引发系统的整体失效。这些未被检测出的故障即为不完全覆盖(ImPerfect Coverage, IPC)故障。针对不完全覆盖问题,Amari等[18-19]进行了较为深入的研究,随后Myers[20]在研究不完全覆盖对k/n系统可靠性影响时提出了4种不完全覆盖模型下系统可靠度的计算方法,Peng等[21]首先采用了一种通用生成函数对故障不完全覆盖条件下串并联结构的阶段性任务系统进行可靠性分析,研究了提升系统可靠性的最优结构并验证了方法的正确性及适用性。考虑到部件参数性能存在不确定性可能给故障的完全检测带来一定困难,因此在系统可靠性分析中适当考虑故障不完全覆盖的情形是较为合理的。
基于上述分析,针对现有研究较少将部件性能存在模糊性及部件间故障相关现象同时纳入建模中对系统可靠性进行评估,本文以k/n系统为研究对象,认为部件承受的载荷是动态分配的,即某一部件失效后会将自身载荷转移到剩余工作件,超过故障相关载荷阈值时就会导致剩余工作件失效率增大。结合系统长期运行后状态参数及性能水平存在不确定性的情形,将部件失效转移率、修复转移率均假定为模糊数的同时,考虑了维修活动具有准备期及故障不完全覆盖这一常见情况,建立了多修理工且维修带准备期的系统可靠性模型,通过逆向逐层分析的思路得到了系统稳态概率的递推表达式。最后运用Zadeh扩张原理分析了系统模糊状态概率的隶属函数,采用参数规划技术得到了系统的稳态指标,并通过算例给出了系统稳态指标随部件参数模糊程度的变动情况。
1 问题描述及重要参数
本文相关参数符号的定义如表1所示。考虑k/n系统,系统共有n个部件,至少有k个部件工作时系统正常运行,若出现n-k+1个部件发生故障,则系统停机接受维修,此时部件不再发生劣化。

表1 参数符号及定义Table 1 Parameters and definitions
系统共配备有c个修理工,每个修理工一次只能修理一个故障件,且维修前需要一定时长的准备期。修理完一个部件后,若系统中仍有故障件,则修理工继续进行维修,当系统中无等待维修的故障件时,修理工进入空闲期。系统各部件之间存在故障相关,且维修时存在故障不完全覆盖的情形。下面对问题作进一步描述。
2) 某部件失效时将自身载荷转移到剩余工作件,超过部件载荷承担阈值时会引发故障相关。



7) 所有参数均服从指数分布且相互独立。
2 模型构建与分析
2.1 系统建模
令Z(t)={0,1,…,n-k+1}、J(t)={0,1,…,c}分别表示t时刻系统中故障件的数量及处于工作状态的修理工人数。系统中有n-k+1个故障件时停机。接到维修任务后,修理工由空闲期经过一段随机时间的准备后进入忙期,开始对故障件进行维修。假设每个修理工一次只能修理一个部件,系统的状态转移过程见图1。由此可得瞬时状态下模糊状态概率微分方程组为
第1行:
(1)
第c行:
(2)
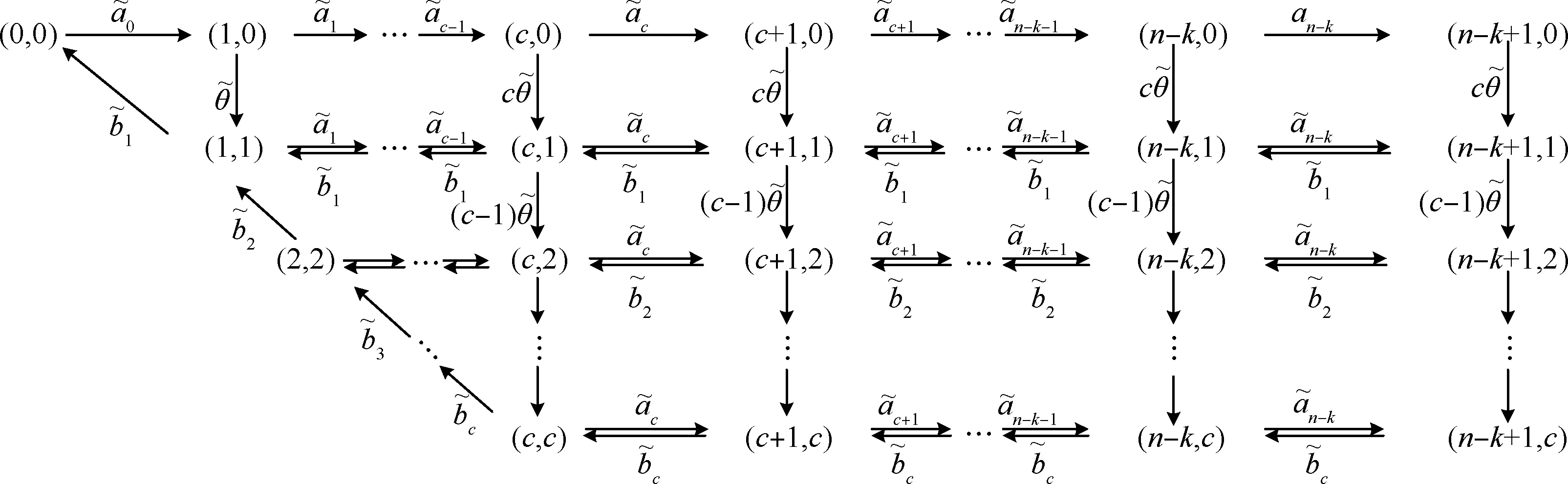
图1 系统模糊状态转移图Fig.1 Diagram for system fuzzy state transition
第2≤j≤c-1行:
(3)

2.2 逆向求解递推关系
求解系统稳态概率方程组一般可以采用直接求解法,但随着系统状态及变量数目的增多,运算量会出现几何式递增,尤其是对于大型复杂多状态系统,直接求解较为困难。通过建立系统的无穷小生成元矩阵,采用迭代的方法也可得到系统稳态概率,矩阵几何解法是处理此类问题的有力工具,且能将结果精确到任意程度。但是同样的,假如系统较为复杂,参变量数量过多,无穷小生成元矩阵的建立本身就较为困难,同时需要经过迭代运算,可能会出现运算量过大导致计算机运行负担较重的情形。
首先根据状态转移微分方程组求解系统的稳态概率方程组。由式(1)可得:
(4)

则可得:


2≤i≤c

c+1≤i≤n-k
可得:
2≤i≤c
(6)
(7)

(8)
(9)
则可得
2≤i≤c
(10)
c+1≤i≤n-k
(11)

1≤i≤n-k
(12)
由此可得
(13)
式中:Qi、Wi为常系数。又由
2≤i≤c
(14)
c+1≤i≤n-k
(15)
再次令
则可得
2≤i≤c(16)
c+1≤i≤n-k
(17)

2≤i≤c
(18)
c+1≤i≤n-k
(19)
那么可知
{Qi-1=XiQi+Yi+1Qi+1+Fi
Wi-1=XiWi+Yi+1Wi+12≤i≤c
(20)
c+1≤i≤n-k
(21)

注意到
又经递推式有
故可求出
则可得
(22)
c≤i≤n-k
可得
c≤i≤n-k
(23)
等价于
Ai-Ai-1=Bi+1-Bi+Ci
c≤i≤n-k
(24)
式中:
(25)
由递推式可得
c≤i≤n-k
(26)
c≤i≤n-k
(27)
又因为
故可得

c≤i≤n-k
等价于
c≤i≤n-k
(28)
Vi-3Ki-2Ki-1Ki+Vi-2Ki-1Ki+
Vi-1Ki+Vi+…=
c≤i≤n-k
(29)
3 故障相关规则建立
部件间的故障相关现象大量存在,对系统可靠性造成一定影响。例如载荷分配系统中,某一部件失效会将自身载荷转移到剩余工作件上,导致其余工作件的负担增大,加速失效。
此类例子较为常见,如车辆超载导致大桥承重梁出现裂痕,继而引发断裂现象;又如飓风损毁桥梁斜拉索,导致其余钢索承受应力增大,超过应力极限时容易出现裂纹,进而发生断裂的情况;车辆系统中,一系弹簧、一系垂向减振器、二系空气弹簧、二系垂向减振器均承担着车辆垂向减振任务,若其中之一失效,将导致施加于其余工作件的应力增大,致使其失效率随之增大。
然而值得注意的是,现有研究大多是在故障相关现象必然发生这一前提下进行的。但在工程实际中,故障相关关系虽然广泛存在,却大多拥有一定的发生条件。比如某一部件失效,并不一定会引发剩余工作件的失效率增大,而是存在故障相关载荷阈值,即部件承担的载荷超过某一阈值时,才会从缓慢的自然失效过程进入加速劣化的状态。
对于此类存在载荷动态分配现象的实际问题,Power Law规则常用于可靠性建模,一定程度上能够较好地反映系统部件间的故障相关关系。考虑到系统由同型部件构成,故假设任意时刻系统承担的总载荷都平均分配给工作件是较为合理的。
(30)
(31)
式中:li=W/(n-i)为系统中有i个部件失效时剩余每个工作件的承担载荷,W为系统承受的总载荷。
4 系统稳态指标

(32)

(33)

结合各项参数,可得状态概率的下边界为

0≤α≤1
(34)
上边界为

0≤α≤1
(35)
4.1 模糊稳态可用度
又由清晰集下系统可用度定义,可得系统模糊稳态可用度为
(36)

(37)
(38)
4.2 模糊维修忙期概率
认为只要系统中有一个修理工正在工作,修理工就处于忙期,则修理工繁忙的模糊稳态概率为
(39)

(40)
(41)
4.3 忙期修理工平均人数
系统中正在进行维修任务的修理工平均数量为
(42)

(43)
(44)
4.4 系统故障件平均数量
系统中平均故障件数量为
(45)

(46)
(47)
4.5 系统平均换件数量
由部件的不完全覆盖假设可得
(48)

(49)
(50)
5 实例分析
可靠性数据的获得通常有两种途径,即可靠性试验和现场收集[22]。前者需经过大量试验,消耗的资源、时间较多,但可信度较好。后者通过现场实地获得,操作较为方便,但可能出现系统状态不稳定导致数据失真的情况。
考虑到本文研究的是系统长期运行后处于稳态的情形,在对历史数据进行收集整理的基础上,通过筛选将误差较大的数据剔除后进行技术处理,得到系统部件的所有性能参数、人员维修速率及维修准备率,运用于本文算例中说明模型的适用性。

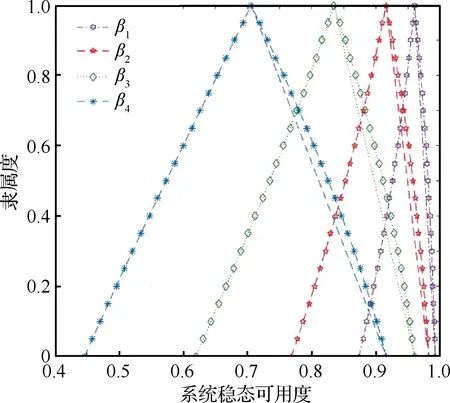
1)c 当c 运用2.2节提出的求解思路,给出系统的模糊稳态指标,如图2所示。 由图2(a)可知考虑部件之间的故障相关性时,可用度约在0.872~0.992之间,忽略故障相关影响时,系统的稳态可用度在0.971~0.999之间,可用度区间下界差值为0.099,可以看出是否考虑故障相关性对系统可用度区间下界影响较大。由图2(b)可知考虑部件故障相关性的影响,修理工繁忙的稳态概率在0.28~0.67之间,忽略故障相关影响时,忙期概率为0.265~0.58之间。由图2(c)可知故障相关时,系统中处于忙期的修理工平均人数为0.335~0.965之间,忽略故障相关时,忙期的平均人数为0.29~0.755之间。如图2(d),考虑载荷动态分配对部件失效率的影响,可知系统中故障件的平均数量在0.62~1.75之间,忽略部件故障相关性,故障部件的平均数量为0.54~1.31。根据图2(e)可知考虑故障相关时需进行换件维修设备的平均数量为0.026~0.265,忽略故障相关时为0.025~0.198。 2)c≥n-k+1 当c≥n-k+1时,由于单个修理工每次只能对一个故障件进行维修,若c>n-k+1,则会出现修理工空闲的情况,此时可对空闲修理工进行其余任务的指派,以提高生产效率。因此只需考虑c=n-k+1的情形,即c=4。此时系统的稳态概率方程组为 图2 c 由图3(a)可知考虑部件之间的故障相关性时,可用度约在0.922~0.996之间,忽略故障相关影响时,系统的稳态可用度在0.982~0.999之间,可用度区间下界差值为0.06,可以看出故障相关性对系统可靠性存在一定影响。由图3(b)可知考虑部件载荷动态分配时修理工繁忙的稳态概率在0.275~0.635之间,忽略故障相关影响时,忙期概率为0.26~0.57之间。由图3(c)可知考虑部件载荷动态分配时,系统中处于忙期的修理工平均人数为0.42~1.35之间,忽略故障相关时,忙期的平均人数为0.26~1之间。如图3(d),考虑故障相关对部件失效率的影响,可知系统中故障件的平均数量在0.6~1.55之间,忽略部件故障相关性,故障部件的平均数量为0.54~1.24。根据图3(e),考虑故障相关时,系统中需要进行换件维修设备的平均数量为0.026 5~0.235,忽略故障相关时为0.025~0.175。 图3 c≥n-k+1对应的系统模糊稳态指标Fig.3 System fuzzy steady features with c≥n-k+1 同时,由于系统中部件之间的故障相关关系服从Power Law规则,因此载荷分配系数β0的变化对系统整体可靠性的影响也不容忽视(见图5)。图中载荷分配系数1为β1=1.2,系数2为β2=1.8,系数3为β3=2.4,系数4为β4=3.0。可以看出,当载荷分配系数逐渐增大时,系统稳态可用度降低,这与工程实际较为相符,且更进一步地,当载荷分配系数为β4=3.0,可用度区间的上下界差值达到了约0.47,反映出部件参数模糊性对系统可靠性评估的影响较大。从中不难得知,当系统的载荷分配系数逐渐增大,部件参数性能的不确定性对系统可用度的影响也逐渐增大,主要体现在可用度区间上下界差值的扩大。 通过分析可得系统主要稳态指标,如用户较为关心的稳态可用度,管理者更为关心的修理工忙期概率和正在进行维修活动的修理工平均人数,以及备件保障方注重的故障件平均数量等。考虑到工程实际中存在一定的不确定性因素,得到的稳态指标均为区间范围,有利于更好地为管理层提供决策支持,合理进行任务分工及资源分配,在保证系统可用度的前提下尽可能降低资源消耗。例如第1个例子中考虑故障相关时处于维修忙期的修理工平均人数在0.335~0.965之间,那么从长远考虑,只需准备最多一个修理工对应的资源或经费即能保证维修任务的顺利完成。又例如第2个例子中,考虑故障相关时故障件的平均数量为0.6~1.55之间,那么从长远看,备件保障方确保随时能够提供两台设备的维修预算费用是较为经济合理的。 图4 系统稳态可用度随维修准备率的变化Fig.4 Steady state availability of system vs maintenance preparation rate 图5 系统稳态可用度随载荷分配系数变化Fig.5 Steady state availability of system vs load distribution coefficient 长期运行的劣化累积和复杂多变的外部环境导致系统状态性能存在模糊性,且部件间的故障相关问题使得系统可靠性建模尤为困难,本文同时考虑系统模糊性及部件之间的故障相关问题进行研究。 1) 通过分析修理工数量与k/n系统故障件数量关系对系统可靠性的影响,便于在保证系统可用的情况下合理安排作业任务。 2) 维修前存在准备期,且修理工的不同准备速率对系统可靠性指标具有重要影响,尤其对于维修准备速率不定的情形,模糊理论可以较好评估。 3) 将故障相关性分析及不完全覆盖的情形纳入系统可靠性建模之中,认为故障相关的发生存在一定阈值,以Power Law规则为基础,考虑系统载荷动态分配的k/n模型,评估结果较为符合实际。 5) 最后,通过算例给出了部件参数不同模糊程度对系统可靠性指标的影响,并对关键参数进行分析,为维修力量的合理指派及降低资源消耗提供了参考,对研究复杂条件下的多状态系统具有一定意义。 [1] MURTHY D N P, NGUYEN D G. Study of two-component system with failure interaction[J]. Naval Research Logistics Quarterly, 1985, 32(2): 239-247. [2] NAKAGAWA T, MURTHY D N P. Optimal replacement policies for a two-unit failure interaction[J]. Operations Research, 1993, 27(4): 427-438. [3] LEUNG K N F, LAI K K. A preventive maintenance and replacement policy of a series system with failure interaction[J]. Optimization, 2012, 61(2): 223-237. [4] SUNG C K, SHEU S H, HSU T S, et al. Extended optimal replacement policy for a two-unit system with failure rate interaction and external shocks[J]. International Journal of System Science, 2013, 44(5): 877-888. [5] 高文科, 张志胜, 周一帆, 等.存在故障相关及不完备检测的主辅并联系统可靠性建模与维修策略[J].自动化学报,2015, 41(12): 2100-2114. GAO W K, ZHANG Z S, ZHOU Y F, et al. Reliability modeling and maintenance policy for main and supplementary parallel system with failure interaction and imperfect detection[J]. Acta Automatica Sinica, 2015, 41(12): 2100-2114 (in Chinese). [6] 周金宇, 谢里阳.多状态系统共因失效机理与定量分析[J].机械工程学报, 2008, 44(10): 77-82. ZHOU J Y, XIE L Y. Common cause failure mechanism and risk probability quantitative estimation of multi-state system[J].Journal of Mechanical Engineering, 2008, 44(10): 77-82 (in Chinese). [7] 张卓琦, 吴甦, 李斌锋.考虑故障相关的两部件系统机会维修策略[J].清华大学学报(自然科学版), 2012, 52(1):122-127. ZHANG Z Q, WU S, LI B F. Opportunistic maintenance policy for a two-unit system with failure interactions[J]. Journal of Tsinghua University (Science & Technology), 2012, 52(1): 122-127 (in Chinese). [8] AMARI S V, MISRA K B, PHAM H. Reliability analysis of tampered failure rate load-sharingk-out-of-n: G system[C]∥Proceedings of ISSAT International Conference on Reliability and Quality in Design, 2006: 30-35. [9] 王兴贵, 韩松臣, 秦俊奇, 等. 多机械臂搬运同一物体的协调动态载荷分配[J].力学学报, 1999, 31(1): 119-125. WANG X G, HAN S C, QIN J Q, et al. Coordinated dynamic load distribution for mutiple robot manipulators carrying a common object system[J]. Acta Mechanica Sinica, 1999, 31(1): 119-125 (in Chinese). [10] BORGES C L T, FALCAO D M. Optimal distributed generation allocation for reliability, losses, and voltage improvement[J]. International Journal of Electrical Power and Energy Systems, 2006, 28(6): 413-420. [11] DING Y, LISNIANSKI A. Fuzzy universal generating functions for multi-state system reliability assessment[J]. Fuzzy Sets and Systems, 2008, 159(3): 307-324. [12] 鄢民强, 杨波, 王展.不完全覆盖的模糊多状态系统可靠性计算方法[J].西安交通大学学报, 2011, 45(10): 109-114. YAN M Q, YANG B, WANG Z. Reliability assessment for multistate system subject to imperfect fault coverage[J]. Journal of Xi’an Jiaotong University, 2011, 45(10): 109-114 (in Chinese). [13] 涂春泰, 阚树林, 殷海蒙.大型复杂可修系统的模糊可靠性分析[J]. 机械设计与研究, 2002, 18(3): 13-14. TU C T, KAN S L, YIN H M. Fuzzy assessment for multi-state repairable-system[J]. Machine Design and Research, 2002, 18(3): 13-14 (in Chinese). [14] LIU Y, HUANG H. Reliability assessment for fuzzy multi-state system[J]. International Journal of Systems Sciences, 2010, 41(4): 365-379. [15] 胡林敏.串并混联可修系统的可用度分析及应用研究[D]. 秦皇岛: 燕山大学, 2014: 83-106. HU L M. Research on availability analysis and application for repairable series-parallel compound systems[D]. Qinhuangdao: Yanshan University, 2014: 83-106 (in Chinese). [16] UPRETY I, PATRAI K. Estimating reliability of a repairable system with imperfect coverage and fuzzy parametric non-linear programming approach[J]. Opsearch, 2016, 53(1):1-15. [17] GARG H. An approach for analyzing the reliability of industrial system using fuzzy Kolmogorov’s differential equations[J]. Arabian Journal for Science and Engineering, 2015, 40(3): 975-987. [18] AMARI S. Reliability, risk and fault-tolerance of complex systems[D]. Kharagpur: Indian Institute of Technology, 1997: 33-42. [19] AMARI S, DUGAN J, MISRA R. A separable method for incorporating imperfect fault-coverage into combinatorial models[J]. IEEE Transactions on Reliability, 1999, 48(3): 267-274. [20] MYERS A F.k-out-of-n: G system reliability with imperfect fault coverage[J]. IEEE Transactions on Reliability, 2007, 56(3): 464-473. [21] PENG R, ZHAI Q, XING L, et al.Reliability analysis and optimal structure of series-parallel phased-mission systems subject to fault level coverage[J]. IIE Transactions, 2016, 48(8): 736-746. [22] 任博, 吕震宙, 李贵杰, 等. 基于通用生成函数的系统寿命可靠性分析[J]. 航空学报, 2013, 34(11): 2550-2556. REN B, LV Z Z, LI G J, et al. Reliability analysis for system life based on universal generating function[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(11): 2550-2556 (in Chinese).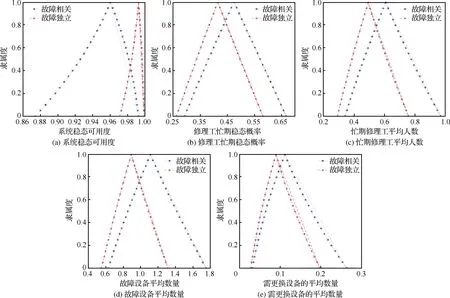


6 结 论
