一种波纹管式水下机器人设计
2018-04-18刘子浪李日辉李德荣劳俊达刘冠灵李志鹏
刘子浪,李日辉,李德荣,劳俊达,刘冠灵,李志鹏
一种波纹管式水下机器人设计
刘子浪,李日辉,李德荣*,劳俊达,刘冠灵,李志鹏
(广东海洋大学 机械与动力工程学院,广东 湛江 524088)
针对目前作业级水下机器人的噪音大、影响水生物正常生长的问题,提出一种基于波纹管平衡器的作业级ROV水下机器人设计,具有浮力控制精度高、控制反应迅速的特点,可应用于水产养殖等浅水作业领域,具有能耗低、噪声小、对水下生物干扰小的优点。开架式的设计使该ROV水下机器人具有模块化优势,通过姿态控制系统调整浮力,可搭载不同的作业设备,能满足深水网箱养殖的多种需求。
波纹管;水下机器人;姿态控制;模块化;低噪音
ROV(Remote Operated Vehicle)水下机器人可分为观察级和作业级。观察级ROV本体尺寸、重量较小,负载能力低,搭载有摄像头,常用于水下视频监测,设备可扩展能力弱,功能较为单一。作业级ROV主要用于水下施工、公安消防、科研等领域[1-3],可搭载液压或电动水下机械手,能进行水下打捞、水下施工、水下抓取、水下采样、水下标记等水下作业,但往往设备体积庞大、工作噪声大,设备操作复杂且造价高昂。
针对以上问题,本文提供了一种作业级波纹管式水下机器人的设计,具有能耗低、噪音小、作业时对水生物干扰小的特点,可应用于水产养殖领域,满足对网箱实行全天候的水下监控、检测网箱破损情况和网箱内部饵料剩余情况、病体水产采样、检测水温水质参数变化等多种需求,具有很高的设备使用频率和很好的应用前景。同时,开架式的设计使该ROV具有模块化[4]的优势,通过姿态控制系统调整浮力,可搭载不同的作业设备,能满足深水网箱养殖的多种需求。
1 控制系统整体设计
本设计控制逻辑上内建有ROV控制系统,如图1所示,具体包括姿态控制系统、定深控制系统、偏航控制系统、设备自检系统、水下作业系统、水环境检测系统等。
1.1 控制中心(电子仓)
控制中心(电子仓)采用防水密封结构,内有电控装置以及多种水质传感器。开口处安装有多组防水接头和一组线缆管道。水下摄像头、推进器、水下照明装置、多功能云台、水下作业装置多功能接口的线缆均通过防水接头引出。线缆管道从电子仓中引出后分成四组通往四个平衡总成,平衡总成中直线驱动装置、温湿度传感器、压力传感器的线缆通过线缆管道接入电子仓,这种处理可以减少电子仓上开孔数量。上盖有两组开孔,水压传感器、水质传感器由这两个孔位伸出,再通过螺栓锁紧,并用橡胶垫进行密封。
1.2 姿态控制系统(平衡总成)
平衡总成(图2)通过螺栓与波纹管平衡器上的波纹管法兰连接,并用橡胶密封圈进行密封加固形成封闭腔,腔内装有直线驱动装置,通过销钉与法兰顶盖、法兰底盖连接。直线驱动装置做往复直线运动,压缩波纹管平衡器从而改变封闭腔内气体体积。

1.法兰顶盖2.尼龙垫圈3.铝合金垫片4.套筒5.直线驱动装置 6.铜轴套7.橡胶密封圈8.法兰底盖9.带法兰四氟波纹管
波纹管平衡器,又称为四氟波纹管平衡器,在本设计中指一种用可折叠皱纹片沿折叠伸缩方向连接成的管状弹性敏感元件,可通过压缩、拉伸改变长度。聚四氟乙烯(PTFE)波纹管,目前主要用于管道柔性连接和作为深海设备压力平衡器等,具有很好的伸缩性能、独特的耐腐蚀性能、良好的抗疲劳性能等,按GB l040-79测得PTFE断裂伸长率为233%[5]。聚四氟乙烯波纹管精度要求高、材质弹性模量低、波纹结构易变形[6],在力的作用下波纹管的波峰、波谷产生形变。相对于利用皮囊形变进行浮力改变的装置[7],该部件的优点有:压缩时噪音小;伸缩形变稳定,可精确控制浮力;具有一定的耐压能力,浅水作业时无须另外加装压力平衡装置。相对于不锈钢波纹管,该部件的优点有:降低结构重量、降低对直线驱动装置的动力需求、提高耐海水腐蚀能力、提高形变柔韧性、具有耐形变疲劳能力。同时考虑到水下作业需要较好的耐压能力,本设计中采用耐正、负压的聚四氟乙烯波纹管。波纹管两端的法兰两侧都放置有铝合金垫圈,提高螺栓密封性能。
计算公式如下:
式中:为浮力;为水的密度;为波纹管位移量;为直径;2为工作水深环境水压;1为大气压强;为重力加速度;0为工作水深;为浮筒内部压力;为波纹管内空气体积;为气体物质的量;为常数;为热力学温度。
在需要更换搭载的其他作业设备时,其浮力由压缩的空气体积改变量决定,具体取决于浮筒内径、波纹管压缩量。当该ROV通过压缩波纹管平衡器达到需要的压缩量时,即可保持装置整体的零浮力状态。
选定带负载能力40 kg、最大水深30 m进行设计,根据尺寸规格参数选取波纹管内径为140 mm、压缩量为0~100 mm,计算出环境水压2绝对值,以设计最大水深作工作水深为例进行计算。使用SolidWorks结构仿真计算求得:4个波纹管处于拉伸行程极限时管内空气体积为78 L,并记此时为状态1,可知该状态对应浮筒内气压即为预加气压值;当波纹管压缩量最小时波纹管的位置记为状态2,并令此时管内气压等于2。由此可算出波纹管压缩量,代入公式求得出状态2管内空气体积为62 L。代入公式,可算出状态1浮筒内部气压为3.5×105Pa,这一数值可作为预加气压的参考值[8]。
ROV在水中共有6个自由度,包括:进退、横滚、沉浮、偏转、横摇、俯仰均,可由姿态控制系统实现。图3为实现机器人主体的实现俯仰运动的原理图。
1.3 设备自检系统
设备自检系统包括温湿度传感器、电流传感器、六轴姿态传感器。温湿度传感器等,通过螺栓固定于法兰顶盖的肋板上,用于检测直线驱动器是否发生故障、平衡总成是否发生漏水。电流传感器置于电子仓内,用于检测各个直线驱动器、推进器的电流大小,以监测设备运转状况。
2 ROV整体设计
ROV整体设计如图4所示。框架整体由铝支架型材搭建而成,该型材刚度高、耐腐蚀性好、成本较低。框架结构上下部分别通过螺栓固定有顶板、底板及线缆夹具。脐带电缆通过线缆夹具进行夹持固定并接入电子仓,连接上位机控制端与下位机设备,为下位机设备提供供电和进行通讯。顶板、底板上均留有多个预留孔位,用于固定配重块。顶板上设置有浮体,通过选择合适的浮体、调整配重块数目及位置便可调整设备为零浮力状态、重心处于框架几何中心所在垂线。框架两侧搭载有推进器,通过PID控制调整偏航角。PID控制由于其结构简单,参数调节容易,控制精度高。
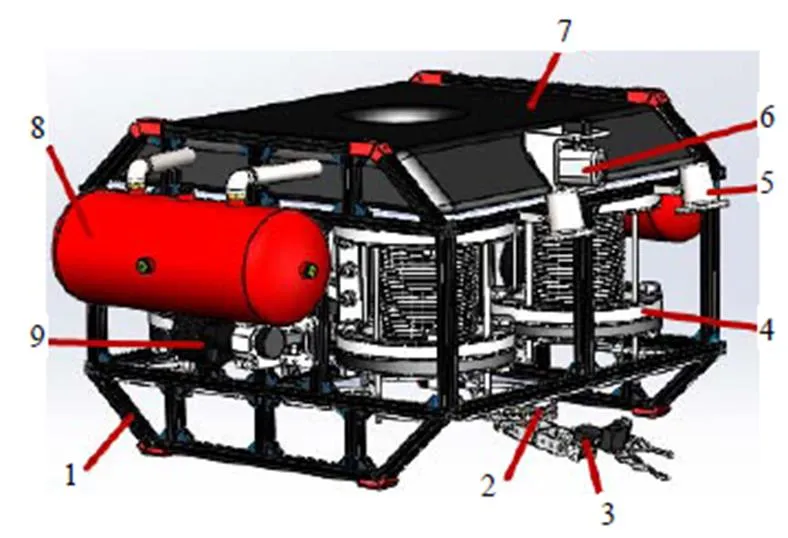
1.铝合金框架 2.多功能云台 3.机械爪平衡总成 4.平衡总成 5.照明灯 6.水下摄像头 7.浮体 8.缓冲罐 9.推进器
3 应用前景
随着我国海洋开发事业的发展,水下机器人操作手在水下勘探、水下采矿、海洋石油工程等领域发挥着越来越重要的作用[9]。波纹管压缩时耗能低、噪音小、控制精度高,作业时对水下生物产生的不良影响极低。从长期来看,水下机器人作为智能化、自动化作业的典型应用,拥有广阔的发展前景[10],可广泛应用于深水网箱养殖、水下施工、水下考古、水下科研等水下作业中,并能有效降低人类活动对海洋生态干扰。
[1]王丹. 水下机器人在深水海底电缆维修中的应用[J]. 科技资讯,2012(20):20-21.
[2]彭阿静. 一种用于安保的水下机器人设计[J/OL]. 机电工程技术,2015,44(6):59-61.
[3]彭学伦. 水下机器人的研究现状与发展趋势[J]. 机器人技术与应用,2004(4):43-47.
[4]徐玉如,李彭超. 水下机器人发展趋势[J]. 自然杂志,2011,33(3):125-132.
[5]吴海桥,李永生,王银惠,董珉. 聚四氟乙烯波纹管刚度性能研究[J]. 压力容器,1997(2):20-24,90.
[6]吴迎春,谢波. 聚四氟乙烯波纹管的车削加工[J]. 轻工机械,2014,32(6):78-80.
[7]康昌霖,周春琳,朱琦. 一种水下机器人自排油式浮力调节装置[P]. CN205150199U,2016-04-13
[8]刘子浪,杨芳,庄集超,张立群,张德立,苏婷. 用于深海网箱养殖的一种小型ROV结构设计[J]. 渔业信息与战略,2017,32(3):211-216.
[9]常宗瑜,陈秉聪. 水下机器人——机械手系统的动力学分析[J]. 机械,2006(4):4-6,29.
[10]朱帅. 海洋开发,水下机器人大有可为[J]. 中国工业评论,2017(8):72-76.
Design of a Bellows Underwater Robot
LIU Zilang,LI Rihui,LI Derong,LAO Junda,LIU Guanling,LI Zhipeng
( Mechanical and Power Engineering College, Guangdong Ocean University, Zhanjiang 524088, China)
In view of the noise of working class underwater robot, affecting the normal growth of aquatic organisms. This article presented a design of an operating level ROV underwater robot which based on bellows balancer. This underwater robot has characteristics of high precision and rapid respond of buoyancy control. It can be used in shallow water operation, such as aquaculture, and has the advantages of low energy consumption, small noise and small interference to underwater organism. At the same time, the design of open shelves so that the ROV robot has the advantages of modular, through the attitude control system to adjust buoyancy, can be equipped with different operating equipment, can meet the various needs of offshore cage aquaculture.
bellows;underwater robot;attitude control;modularization;small noise
S951.3
A
10.3969/j.issn.1006-0316.2018.03.010
1006-0316 (2018) 03-0039-04
2017-06-12
广东海洋大学“创新强校工程”2013年省奖补资金支持建设项目——基于校企协同的工程训练育人平台建设(GDOU2013010306);广东海洋大学“创新强校工程”2016年省财政专项资金支持项目——金工实习教学团队GDOU2016041003;广东海洋大学海之帆——起航计划(qhjh2017kj09);2018年度广东大学生科技创新培育专项资金(攀登计划pdjha0232)
刘子浪(1994-),男,湖南岳阳人,本科,主要研究方向为机电一体化。
李德荣(1968-),男,广东湛江人,硕士,高级实验师,主要研究方向为数字化设计与制造技术、机电自动化装备设计与制造。
