基于优选傅里叶描述子的粘连条锈病孢子图像分割方法研究
2018-04-18邸馨瑶宋怀波
邸馨瑶 焦 林 宋怀波
(西北农林科技大学机械与电子工程学院 陕西 杨凌 712100) (农业部农业物联网重点实验室 陕西 杨凌 712100)
0 引 言
小麦条锈病是小麦锈病的一种,是中国小麦生产中分布广、传播快、危害面积大的重要病害之一。小麦条锈病曾在全国范围内大范围流行,发生面积近670万hm2,年损失约10亿kg[1]。小麦条锈病一般流行年份可致减产10%~20%,特大流行年份减产可达60%以上,甚至绝产。如何实现条锈病的有效防控一直是我国农业研究领域的重点和难点。条锈病害病孢子呈鲜黄色,椭圆形,成株叶片初发病时夏孢子堆积为小长条状,得到的孢子显微图像需要人工计数分析,误差较大。如何实现粘连孢子的自动准确分割与计数对小麦条锈病孢子的在线检测具有重要的研究意义。
目前,对于粘连目标的分割、计数已经取得了较大的进展。刘晓婉[2]采用基于边界轮廓特征的算法,利用近似多边形法和矢量点积与叉积的性质获取分割点,实现了对粘连目标图像的分割。葛亮等[3]针对光照不均匀的粘连细胞图像,通过改进基于模板集精简的算法,提高了显微细胞图像分割的效率。林小竹等[4]利用新型分水岭分割算法,根据图像中像素的4连通和集水盆地的边缘情况实现了目标的准确计数。梁光明等[5]针对Canny算子在分割图像过程中容易出现的粘连现象,结合目标图像的基本形状特征,实现了平滑目标轮廓,连接断裂图像边缘的效果,提高了目标分割的准确性。Danielisa等[6]为实现了对人脸图像的嘴唇分割,提出了超光谱图像的嘴唇自动分割算法,基于傅里叶描述子对经过图像增强及形态约束处理后的人脸图像进行特征提取。缪慧司等[7]提出了一种结合距离变换与边缘梯度分水岭算法的显微血细胞分割方法,实现了细胞的提取以及粘连细胞的自动分割。杨信廷等[8]为了检测黄瓜叶片的湿润情况,通过将原始图像由RGB颜色空间转换到L*a*b*颜色空间并利用欧式距离度量像素的相似度及K-means算法,实现了黄瓜叶片的水滴荧光图像分割。Bao等[9]为了实现对脑磁共振图像的分割,提出了基于特征敏感标签融合的图像分割方法。陈浩等[10]为实现对集捆后的棒材自动计数,提出了一种基于类圆形假设的图像分割与识别方法。宋怀波等[11]在K-means聚类分割算法基础上,提出了基于凸壳的重叠苹果目标分割方法。
粘连孢子图像存在图像背景噪声、孢子失活等问题,在已有的粘连目标分割、计数方法中,已较好地解决了粘连目标与背景分割的问题,但对多目标粘连的分割问题尚未很好解决。本文拟将K-means聚类算法与傅里叶描述子进行结合,在对目标准确分割的基础上,基于傅里叶描述子方法,解决分割后目标轮廓不够平滑的问题。然后,利用基于距离测度的角点检测方法,实现粘连孢子角点的准确检测,并进行粘连孢子的计数,以期为粘连孢子目标的准确识别提供新的借鉴。
1 实验材料与方法
1.1 实验材料
本文所用小麦条锈菌孢子是在西北农林科技大学植物保护学院实验室培养条件下所得,将孢子与矿物油按体积1∶10相混合后滴加于载玻片上,用Olympus生物电子显微镜(型号:BX63,UCmos 14000KPA Pro系列真彩色高分辨率智能CCD显微镜数字摄像头)采集图像。图像保存为4 096 Pixel×3 288 Pixel大小,JPEG格式。图像采集装置如图1所示。实验采用其中20幅图像进行测试。

图1 图像采集装置
所用图像处理设备为台式计算机,其配置为:CPU:Pentium(R)Dual-Core E5400 2.70 GHz;内存:3 GB。所有算法程序均在MATLAB 2009a上运行。
1.2 方 法
1.2.1孢子图像分割
1) 孢子图像预处理为了获得更为一致的小麦条锈病孢子图像,采用半径为5的‘disk’形结构元素进行了闭运算处理[12]。预处理结果如图2所示。

图2 孢子图像预处理
图2(a)为在400倍放大下原始孢子的显微图像,图2(b)为经过闭运算处理之后的孢子图像。通过图像对比可以看出,经过闭运算处理的图像中原带毛刺的粗糙边缘变得平滑且原图中影响计数的杂质点及孔洞得到填充,有利于图像中目标孢子与背景杂质的分离,为孢子分割计数做准备。
2) K-means聚类算法介绍由图2可以看出,受到杂质等干扰的影响,孢子的分割难度较大,为了实现孢子图像的准确分割,本研究使用K-means聚类算法对孢子进行聚类处理[13]。首先从经过预处理的孢子图像中任意选择4个对象作为初始聚类中心[14];余下孢子则根据它们与这些聚类中心的相似度,分别分配给与其最相似的聚类;然后计算每个所获新聚类的聚类中心;不断重复这一过程直到标准测度函数收敛为止[15]。
经过重复聚类10次后,对图2(a)的粘连孢子的分割结果如图3(a)所示。由图3(a)可以看出,经过K-means聚类的孢子图像孢子紧凑性较好,可较好地将孢子从复杂的背景中分离出来,为孢子的特征提取奠定了基础。对经过K-means聚类算法后的粘连孢子边缘提取与角点检测,如图3(b)、图3(c)所示。(c)是对(b)进行角点检测并放大后的图像,图中的深色区域均为角点检测的结果。可以发现,由于粘连孢子边缘不够平滑,检测到的伪角点过多,无法利用其进行孢子的计数,尚需进一步对孢子图像边缘进行平滑处理以去除伪角点对目标计数的影响。

图3 K-means算法图像聚类结果
3) 基于优选傅里叶描述子的粘连孢子边缘提取经过K-means算法聚类后,在图像边界处图像的灰度值变化比较剧烈,所提取到的伪角点数量偏多,本文采用傅里叶描述子对图像边缘进行平滑以解决伪角点数目过多的问题。
傅里叶描述子的基本思想是:在xy平面的一个由K个像素点组成的数字边界内,从任一点(x0,y0)开始,以逆时针方向在该边界上行进时,会遇到坐标对:
((x0,y0),(x1,y1),…,(xK-1,yK-1))
(1)
该坐标也可以表示为x(k)=xk和y(k)=yk的形式,并用坐标序列描述图像边界得到:
s(k)=[x(k),y(k)]k=0,1,…,K-1
(2)
将每个坐标对可当做一个复数来处理,即s(k)=i(k)+j·y(k)。序列s(k)的离散傅里叶变换(DFT)可以写成:
(3)
式中:复系数a(u)称为边界的傅里叶描述子。
通过对傅里叶描述子系数的傅里叶反变换可以重建图像边界s(k),即:
(4)
假设在计算反变换时,不使用所有的傅里叶描述子系数,而只使用前P(P≤K)个系数。这相当于令上面函数中的a(u)=0(u>P-1)。所得结果是s(k)的如下近似值:
(5)
由式(5)可以看出,对于原始轮廓进行傅里叶描述的关键就是确定一个合适的参数P,在能够表达原始轮廓的前提下得到尽可能平滑的轮廓[16]。对原始孢子轮廓进行一维傅里叶变换所得到的频谱分布如图4所示。由图4可见其频谱大部分区域的能量相对较低,说明此处表达的是图像边缘中的高频信息,对于图像概貌的表达能力有限,因此可以对其频谱图像进行拟合,以剔除这些能量较小的区域。由于图像频谱大致呈高斯分布,可以采用高斯拟合的方式对孢子图像频谱曲线进行拟合。
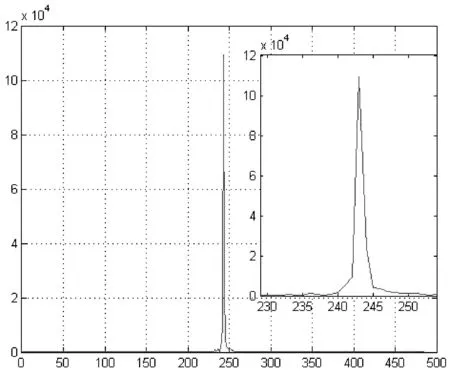
图4 频谱分布图像
4) 傅里叶描述子个数优选方法由式(5)可知,高频分量决定细节部分,低频分量决定图像概貌。随着P的减小,边界细节的丢失就会增加,从而得到更为平滑的轮廓。分别令P为240、96、48、24、12和6,得到的图像轮廓结果如图5所示。图5(a)、(b)使用240个、96个傅里叶描述子显示了图像原始边界的紧密对应,图5(c)、(d)使用相对较少的傅里叶描述子生成的图像显示的边界稍微平滑一些,且基本形状与原始形状十分接近。图5(e)、(f)显示了无法接受的失真,丧失了边界的主要特征。优选傅里叶描述子个数描绘孢子边缘,既要保留粘连孢子的主要特征,又要保证边缘相对平滑,用于描述图像特征最优。

图5 不同傅里叶描述子个数对孢子边缘的描述
为了优选出适合进行孢子分割的图像轮廓,对频谱曲线采用高斯拟合的方式进行拟合,拟合公式如式(6)所示:
f(x)=a1×exp(-((x-b1)/c1)2)
(6)
式中:x为待拟合频谱的序号;f(x)为频谱的幅度;a1、b1、c1均为待拟合系数。当拟合结果的残差平方和SSR 越接近于0,R2-square越接近1,则表明拟合曲线对原曲线f(x)的解释能力越强,拟合结果越好。根据不同阶次拟合误差分析结果如表1所示,可见当使用5阶高斯拟合时综合误差相对较小。因此,本文利用采用5阶高斯拟合方式对图4中的放大区域进行拟合,结果如图6所示。
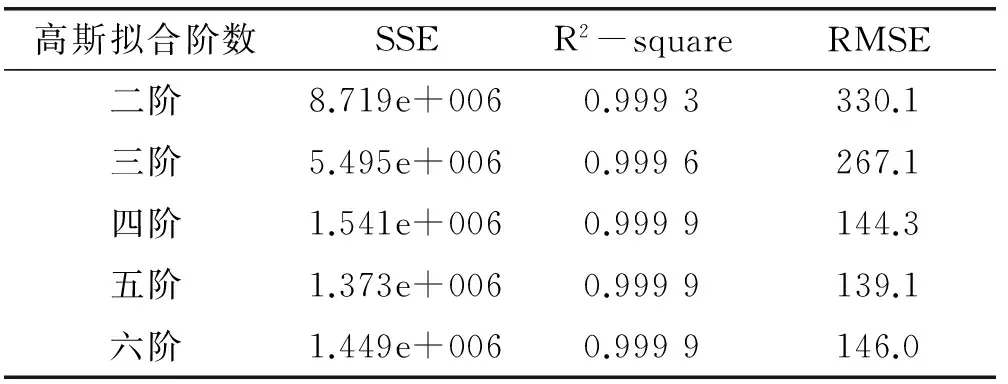
表1 不同阶次高斯拟合误差对比

图6 五阶高斯拟合曲线
由频谱拟合曲线可知,图像频谱幅值在[230,258]区间内频率幅值显著,采用28个傅里叶描述子对孢子边缘进行描述效果较优。对K-means聚类后的孢子图像使用28个傅里叶描述子提取孢子图像边缘,效果如图7所示。可见,采用28个傅里叶描述子提取到的孢子边缘相对更加平滑,并且保留了孢子图像各方面的基本特性,为更精准地提取孢子角点做好准备。

图7 傅里叶描述子对孢子图像边缘提取
1.2.2角点检测
1) 边缘跟踪对于粘连孢子目标,粘连位置存在较为明显的角点,可以用来进行粘连目标的分割。为了得到连通轮廓的角点,首先对孢子轮廓进行编码获取边界序列[17]。
2) 质心-边缘点距计算在轮廓编码算法后即可计算轮廓与质心点之间的距离。对于一个给定的图像质心点C(x0,y0)和编码的轮廓矢量V(x1,y1,x2,y2,…,xN,yN,),其中N是轮廓点的数量,点C(x0,y0)和轮廓点之间的距离计算如下所示[18]:
(7)
以三角形轮廓为例,图8(a)显示了闭合轮廓,其中M是图像的质心点,在图8(b)显示了闭合轮廓质心点M和轮廓之间的距离。对于一个给定的质心点M,轮廓编码顺序为:A-B-C-A,距离的变化从一个较长的距离d1变化到较短的距离d2,然后从距离d2变化到较长的距离d3,并形成了质心-轮廓距离曲线的极值点,如图8(c)所示。通过计算距离曲线的极值点的个数来快速求出候选边角的指数,并通过移除一些曲率极小的伪点来实现顶点的检测。

图8 轮廓角点检测的示意图
根据质心-边缘点距离变化判断角点的关键是中心点M的选择,当孢子的质心落在其边缘上(如图9(a)质心点A所示)时,不能提取到孢子的全部角点,并存在伪角点(如图9(b)所示),则质心-边缘距离变化曲线无效。

图9 孢子角点检测图像
对质心在边缘上的孢子轮廓,通过选择不同的“中心点”得到的孢子质心-边缘距离曲线如图10所示。图10(b)是孢子通过质心-边缘距离算法检测到的角点示意图。经过该点对孢子轮廓的角点检测结果与图9(b)进行对比,可知该中心点所检测到的角点更为准确。

图10 中心点孢子角点检测图像
2 实验结果与分析
为了验证本研究结果的正确性,采用20幅粘连孢子的图像进行本文算法的处理,并将其中4幅经过傅里叶描述子处理的孢子图像所提取到的边缘与图像原始边缘进行了对比,结果如图11(b)、(c)所示。可见傅里叶描述子对边缘的提取更加平滑,而且还可以剔除边缘上的毛刺,使孢子边缘更加清晰,便于对孢子计数。利用质心(中心)-边缘距离变化检测孢子图像角点,对比两种边缘提取方式下的角点个数,结果如图11(d)、(e)所示。从组图中A点可见,在原始边缘中,边缘曲线不够平滑,会提取到一些伪角点,而经过傅里叶描述子提取到的边缘不仅使边缘曲线相对平滑,还保留了孢子图像基本特征,可以精准地提取到孢子图像的角点,区分孢子个数。
对20幅孢子图像频谱拟合,采用优选傅里叶描述子个数对孢子边缘进行提取,并进行角点检测,结果如表2所示。采用傅里叶描述子提取边缘比原始边缘对角点的检测效果更优,总体准确率高达96.2%。由此可见,经过傅里叶描述子提取的边缘角点检测更加精准,可以为图像之后的特征识别、孢子计数提供较好的基础。
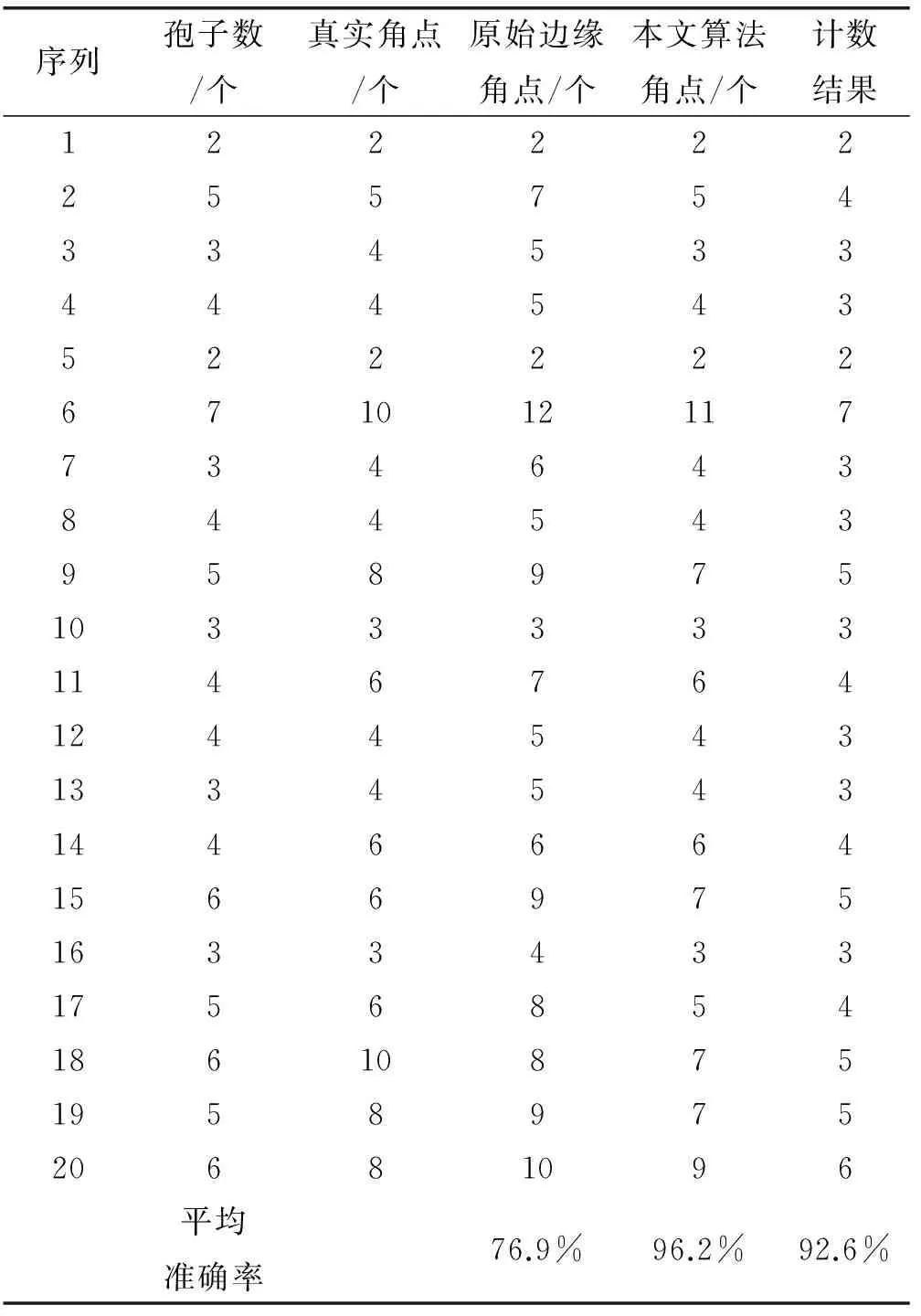
表2 不同边缘提取对角点检测的影响
3 结 语
粘连孢子的准确分割是小麦条锈病孢子准确计数的关键,为了实现其准确分割,本文结合K-means聚类算法与傅里叶描述子优选方法,较好地实现了粘连孢子的准确分割,所取得的主要结论如下:
(1) 结合K-means聚类算法与优选傅里叶描述子技术,可以较好地实现复杂背景下目标的准确分离。通过优选傅里叶描述子,可以获得更为平滑的目标轮廓,为准确地确定粘连孢子的角点奠定了基础。
(2) 为了解决现有角点检测技术存在伪角点的问题,采用基于距离测度的角点检测技术,可以较好地去除伪角点的影响。实验结果表明,利用该方法进行粘连孢子角点检测的准确率可达96.2%。
[1] 万安民,赵中华,吴立人.2002年我国小麦条锈病发生回顾[J].植物保护,2003(29):5-8.
[2] 刘晓婉.基于几何特征的雨滴谱粘连颗粒图像的快速分割算法[J].科技资讯,2016(14):179-180.
[3] 葛亮,于卡.改进的模板匹配显微细胞图像分割算法[J].计算机与现代化,2015(8):1-7,12.
[4] 林小竹,王彦敏,杜天苍,等.基于分水岭变换的目标图像的分割与计数方法[J].计算机工程,2006(32):181-183.
[5] 梁光明,孙即祥.一种基于数学形态学的多结构元图像分割算法[J].计算机工程与应用,2007(43):70-72.
[6] Danielis A,Giorgi D,Larsson M,et al.Lip segmentation based on Lambertian shadings and morphological operators for hyper-spectral images[J].Pattern Recognition,2017,63:355-370.
[7] 缪慧司,梁光明,刘任任,等.结合距离变换与边缘梯度的分水岭血细胞分割[J].中国图象图形学报,2016(21):192-198.
[8] 杨信廷,孙文娟,李明,等.基于K均值聚类和开闭交替滤波的黄瓜叶片水滴荧光图像分割[J].农业工程学报,2016(32):136-143.
[9] Bao S,Chung A C S.Feature Sensitive Label Fusion with Random Walker for Atlas-based Image Segmentation[J].IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society,2017,26(6):2797.
[10] 陈浩,王景中,姚光明.基于类圆分割的棒材计数图像识别[J].工程图学学报,2004(25):98-103.
[11] 宋怀波,张传栋,潘景朋,等.基于凸壳的重叠苹果目标分割与重建算法[J].农业工程学报,2013(3):163-168.
[12] 邓仕超,黄寅.二值图像膨胀腐蚀的快速算法[J].计算机工程与应用,2017(53):207-211.
[13] 汪中,刘贵全,陈恩红.一种优化初始中心点的K-means算法[J].模式识别与人工智能,2009(22):299-304.
[14] 杨善林,李永森,胡笑旋,等.K-means算法中的k值优化问题研究[J].系统工程理论与实践,2006(26):97-101.
[15] Gan G,Ng K P.k-means clustering with outlier removal[J].Pattern Recognition Letters,2017,90(C):8-14.
[16] 赵三琴,刘德营,丁为民,等.边界点数量对傅里叶描述子识别精度的影响[J].农业机械学报,2014(45):305-310.
[17] Gheorghiu E,Kingdom F A A,Sull M,et al.Curvature coding in illusory contours[J].Vision Research,2009,49(20):2518-2530.
[18] Hasim A,Herdiyeni Y,Douady S.Leaf shape recognition using Centroid Contour Distance[J].IOP Conference Series:Earth and Environmental Science,2016,31(1):012002.