基于BP神经网络和改进D-S证据理论的目标识别方法
2018-04-18杨清海
张 志 杨清海
(西安电子科技大学通信工程学院综合业务网理论及关键技术国家重点实验室 陕西 西安 710070)
0 引 言
D-S证据理论具有很强的处理不确定信息能力,表现出很好的工程实用性,因而成为信息融合的经典算法,多用于多传感器目标识别领域[1-3]。在应用经典D-S证据理论时,其关键参数基本概率赋值的获取往往凭经验公式或用统计方法得出,主观性较大,导致决策的可信度低。文献[4]提出了利用统计证据和利用目标速度与加速度等方法获得基本概率赋值,其中统计证据理论的应用要基于观测值应决定一个似真函数和焦元都是嵌套的假设,应用条件较理想化。利用目标速度和加速度来获取基本概率赋值,对实际运动目标而言具有很高的概率偶然性。文献[5]提出了结合粗糙集理论,定义规则强度和决策扩充规则,基于决策表的基本概率赋值方法。其方法先对初始历史数据作离散化预处理,再根据定义规则进行计算,但计算复杂度高,效率较低。为此,本文提出利用BP神经网络[6-8]获取基本概率赋值。BP神经网络具有很强的自组织、自学习和非线性映射能力及良好的容错性和鲁棒性。且经过训练的BP神经网络具有良好的泛化能力。本文通过红外成像传感器采集到的目标特征数据来训练BP神经网络获取基本概率赋值具有工程实际意义和准确性。
经典D-S证据理论在合成高冲突度证据时,往往会出现与常识推理相悖的情况。为了解决这一问题,学者们提出了各种修正方案,典型的有Yager方法[9]、Murphy方法[10]、李弼程方法[11]等。文献[9]中,Yager提出将证据的冲突部分全部赋给未知命题,去除了Dempster-Shafer归一化过程,此方法虽然能合成高冲突度证据,但完全否定了冲突证据的作用。文献[10]中,Murphy提出先对初始证据集进行算术平均,再利用D-S证据理论。该方法能有效融合高冲突度证据,但是忽略了各条证据间的关联性。文献[11]中,李弼程等将冲突概率按各个命题的平均支持程度加权后再进行分配,也能克服经典D-S证据理论在合成高冲突证据时存在的局限性,但该合成方法较保守,收敛速度慢。
本文考虑到证据之间的关联性,提出了证据信任因子的概念。参照文献[12-13]引入Jousselme距离,先计算n条证据任意两条证据之间的Jousselme距离,然后计算证据Ei到证据集E的欧式距离,进而根据定义计算此证据的信任因子。通过归一化信任因子得到证据的权重,再对修正的证据进行加权平均得到期望证据,最后对期望证据进行n-1次融合。实验结果表明,BP神经网络和本文改进的D-S证据理论相结合,能更准确地进行目标识别。
1 目标识别系统模型
在进行目标识别的场景下,单个传感器获取的信息往往是对待识目标的不完整描述,利用多传感器进行信息提取,能够降低信息的不确定性,增强互补性。为此,本文提出了如图1所示的识别系统模型。该模型由基本概率赋值获取和改进证据理论的目标识别两部分组成。利用多组红外成像传感器[14]对待识别目标进行属性信息的采集,提取出特征向量。将采集数据按特征向量划分训练数据和测试数据,训练数据用于BP神经网络模型的构建,测试数据经由BP神经网络的输出,归一化后作为证据的基本概率赋值。然后利用改进的D-S证据理论进行融合目标识别。该模型不仅充分利用了BP神经网络强大的自组织、自学习和非线性映射能力,解决了基本概率赋值难以获取的问题。而且将改进的D-S证据理处理不确定性信息和高冲突度证据的优势发挥了出来,从而提高了目标识别精度。

图1 系统模型框图
2 神经经网络获取基本概率赋值
2.1 构建BP神经网络组
BP神经网络,是一种利用误差反向传播训练算法的多层前馈网络。为了提高了基本概率赋值的准确性,本文将构建m组BP神经网络。对于每一组BP神经网络而言,参数设置方法如下:
(1) BP神经网络具有强大的非线性映射能力,且任意非线性连续函数都可用三层网络来反映,一般选取一个输入层,一个隐含层,一个输出层的三层结构。
(2) 输入层的神经元个数为特征向量元素的个数;输出层的节点数为待识目标的数目;隐含层的节点数可得出,公式如下:

(1)
传递函数可以抑制边缘奇异性较大的数据,约束输出值范围。一般选取sigmiod型传递函数,其收敛速度快,同时控制输出值在0~1之间。
(3) 最大训练次数和误差精度作为网络训练停止的条件,按照实际需要来设定。
2.2 获取基本概率赋值
设构建m组BP神经网络,有k个待识目标。测试样本经由BP神经网络组得到m组k个[0,1]之间的数值,将每一个BP网络所得的数值归一化处理,即得到该条证据对该命题的基本概率赋值。
归一化过程:
(2)
Vi=(aik,…,ai2,ai1)T
(3)
(4)

3 改进D-S证据理论目标识别
利用BP神经网络组获取基本概率赋值之后,我们需要根据改进D-S证据理论对其进行合成,合成结果是目标识别的依据。
3.1 Dempster-Shafer(D-S)组合规则

3.2 改进的证据理论
研究发现,使用经典的D-S证据理论进行证据合成时,可能出现1信任悖论、0信任悖论、“一票否决”等与主观常识相悖的结果。因此经典D-S证据理论的使用范围具有一定的局限性。为了避免上述问题,本文提出了证据信任因子的概念,按照信任因子的大小赋予证据不同的权重,得到期望证据。其核心思想是,根据证据与证据集的欧式距离,得到该证据的冲突度。高冲突度的证据,信任因子小,赋予的权重系数也小。相反,信任因子大,权重系数也大,加权平均后得到期望证据。这样就消减了高冲突度证据对合成结果的影响。
3.2.1证据冲突度的衡量方法
若识别框架U={θ1,θ2,…,θn},下有E1和E2两个证据,对应的基本概率赋值为m1和m2,焦元分别为A和B,则证据E1和E2两个证据之间的Jousselme距离:
(6)
D为2n×2n的正定矩阵,矩阵中的元素:
(7)
式中:D(A,B)称为Jaccard系数,反映了焦元A和B间相似性。
d(m1,m2)的具体计算式如下:
(8)
式中:
假设有n个证据,利用式(7)、式(8)可定义证据距离矩阵Dn×n:
定义证据Ei到证据集E的欧式距离:
(9)
式中:Si是衡量证据Ei冲突度大小的指标,反映了该证据与其他证据的差异程度。当Si较小时,说明Ei与其他证据较一致,冲突度低。相反,Si较大时,说明Ei同其他证据存在较大的差异,该证据歧异性大,冲突度高。
3.2.2证据信任因子Crd的计算
冲突度低的证据,与其他证据的差异性小,可信度高,此时Si→0,Crdi→1,且Crdi随着Si的增大缓慢减小。相反,高冲突证据的可信度低,则Si→1,Crdi→0,且Crdi随着Si的增大迅速趋于0。可见信任因子Crdi与证据的欧式距离Si之间负相关且符合指数函数关系。可假设:
Crdi=f(Si)=(1-Si)α-Si
(10)
对其求导:f′(Si)=(Silnα-lnα-1)α-Si
要保证f(Si)在Si∈[0,1)时是减函数,则需要f′(Si)<0即:
f′(Si)=(Silnα-lnα-1)α-Si<0得到α≥e-1。
如图2所示,对α取不同的值,通过MATLAB仿真,观察f(Si)曲线的变化趋势,当α=e-1时,最符合f(Si)的性质。
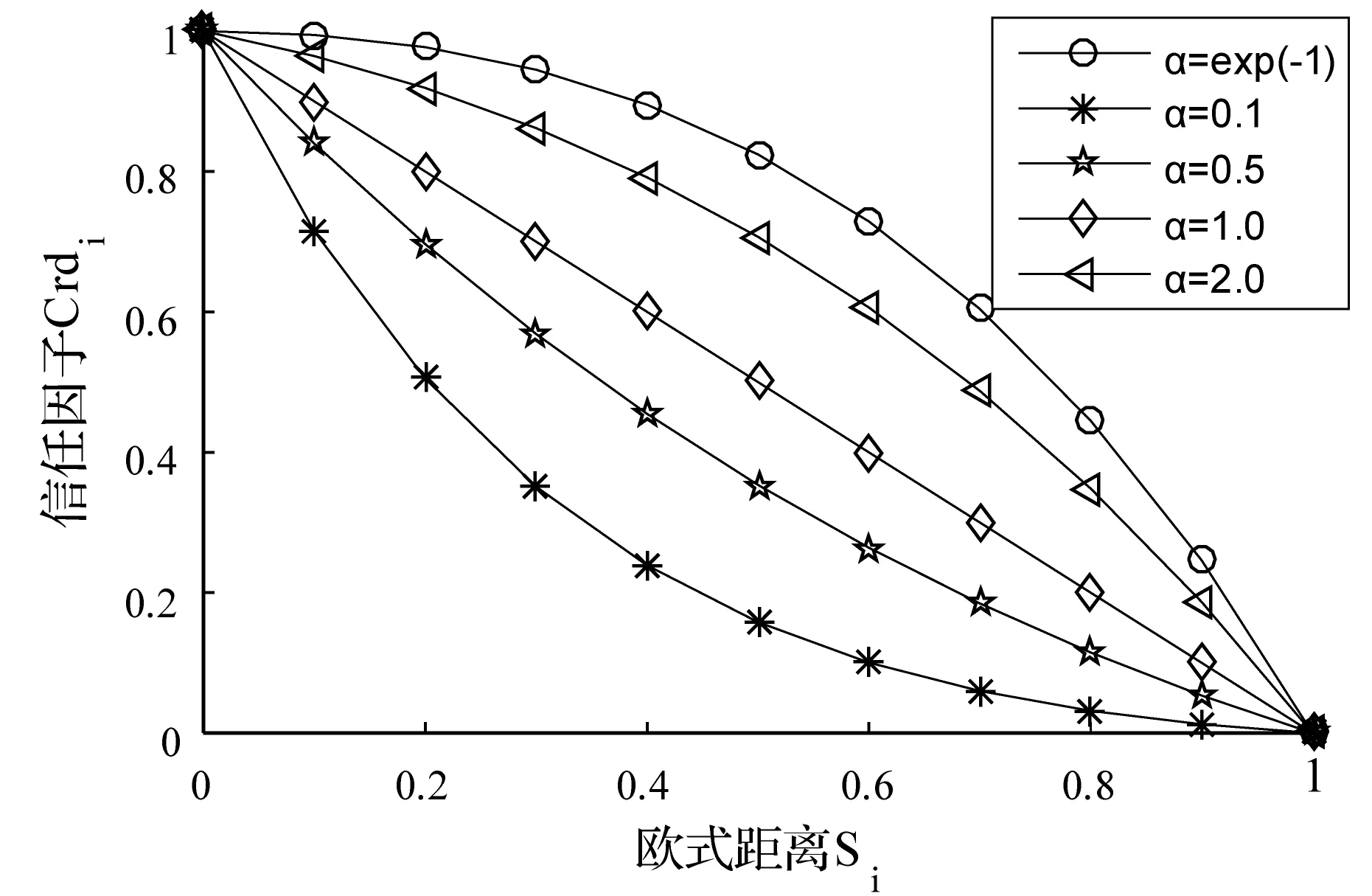
图2 信任因子与欧式距离关系曲线
取α=e-1,则
Crdi=f(Si)=(1-Si)e-SiCrdi∈(0,1]
(11)
3.2.3期望证据的合成
在得到证据Ei的信任因子Crdi之后,进一步获得此证据被其他证据的支持度,并将该支持度作为此证据的权重ωi,计算式为:
Crdmax=max(Crd1,Crd2,…,Crdn)
(12)
(13)
得到证据的权重系数向量为:
W=[ω1,…,ωi,…,ωn]
(14)
对n条证据加权平均后,得到期望证据:
(15)
利用D-S证据理论对期望证据M迭代组合n-1次后的结果作为n条证据的合成结果。
3.2.4目标判决准则
本文采用以下准则进行最终目标判决:
(1) 最终判决的目标具有最大的基本概率赋值。
(2) 最终判决的目标与其他目标的基本概率赋值之差要大于设定的阈值ε1。
(3) 不确定基本概率赋值m(Θ)必须小于设定的门限ε2,其中Θ为不确定集合。
(4) 最终判决的目标的基本概率赋值要大于不确定基本概率赋值m(Θ)。
4 实例仿真及结果分析
4.1 红外成像传感器采集目标属性信息
本文采用四组(S1,S2,S3,S4)红外成像传感器对三个目标(攻击舰、辅助舰、指挥舰)进行9种属性信息的采集。分别采集22组属性数据,一共88组数据。表1是攻击舰(O1)、辅助舰(O2)、指挥舰(O3)的红外样板特征值。

表1 红外样板特征值
4.2 神经网络组的构建
本文将88组数据样本进行划分,前84组作为训练样本,其中85、86、87、88组数据作为测试样本。测试样本数据如表2所示。

表2 测试样本特征值
注:O1代表攻击舰,O2代表辅助舰,O3代表指挥舰
将84组训练样本的9个特征参数分成四组分别训练BP神经网络,得到BP神经网络组。将测试样本也以同样的方式分组,输入训练好的神经网络,获得的输出作为D-S证据理论的证据进行下一步的合成。
建立的BP神经网络分别为:
NN1、NN2、NN3、NN4。
第一组的输入向量:
(A,AT,α,β,EA,P,Rαβ)T。
第二组的输入向量:
(AT,α,β,EA,P,Rαβ,I1)T。
第三组的输入向量:
(A,AT,α,β,EA,P,Rαβ,I1)T。
第四组的输入向量:
(AT,α,β,EA,P,Rαβ,I1,I2)T。
网络的输出,设定为三种:
(1,0,0)T、(0,1,0)T、(0,0,1)T。这三个输出向量分别表示目标O1(攻击舰)、目标O2(辅助舰)、目标O3(指挥舰)。
本文构建只包含一个输入层、一个隐含层和一个输出层的三层网络模型。NN1、NN2、NN3、NN4中输入层的神经元个数分别是7、7、8、8,输出层的节点数都为3,隐含层的节点数都为13(取α=10)。设置的最大训练次数为5 000,误差精度为10-2,传递函数为tansig。
将84组训练样本分别输入神经网络组,得到的训练误差曲线分别如图3-图6所示。
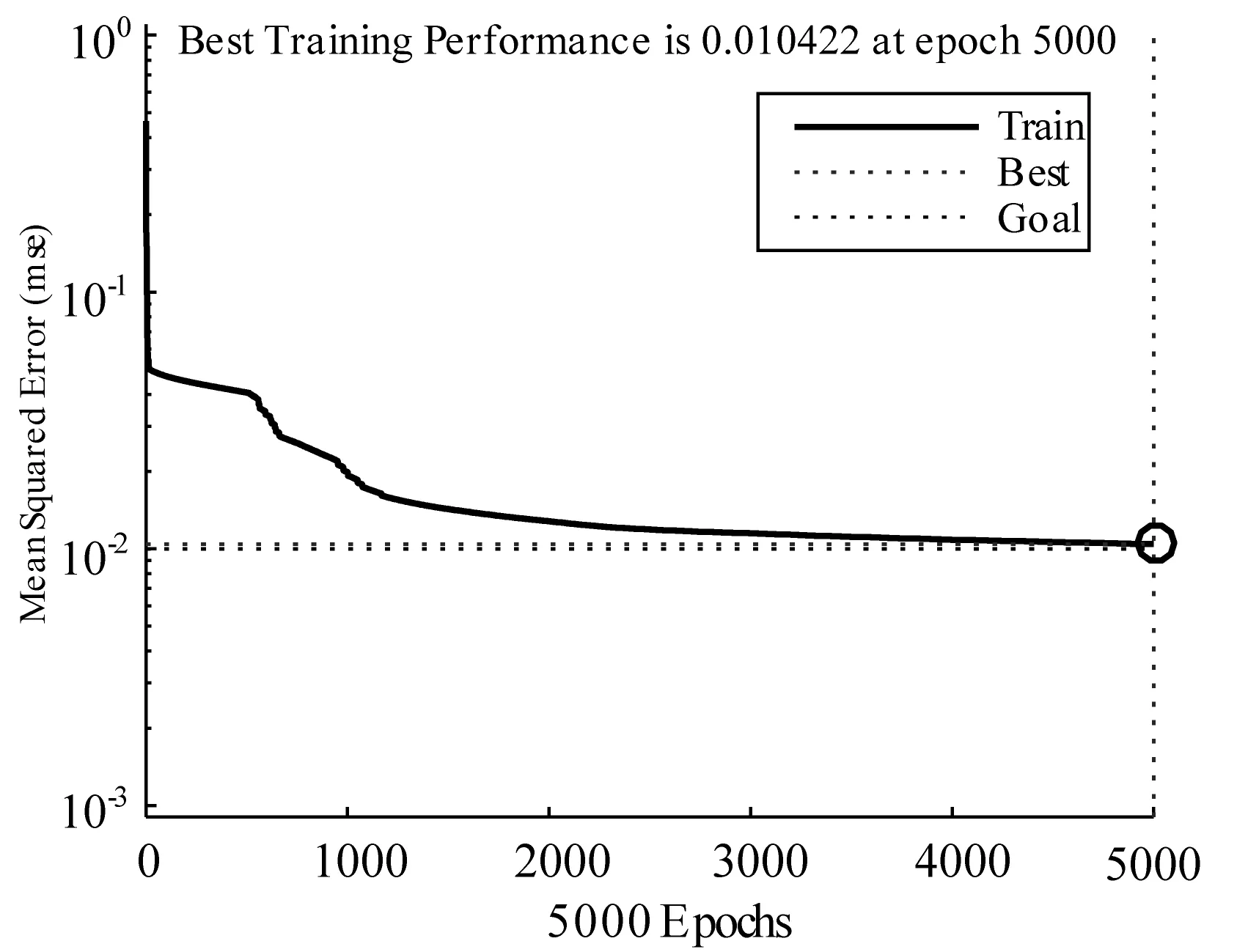
图3 神经网络NN1误差变化曲线

图4 神经网络NN2误差变化曲线

图5 神经网络NN3误差变化曲线
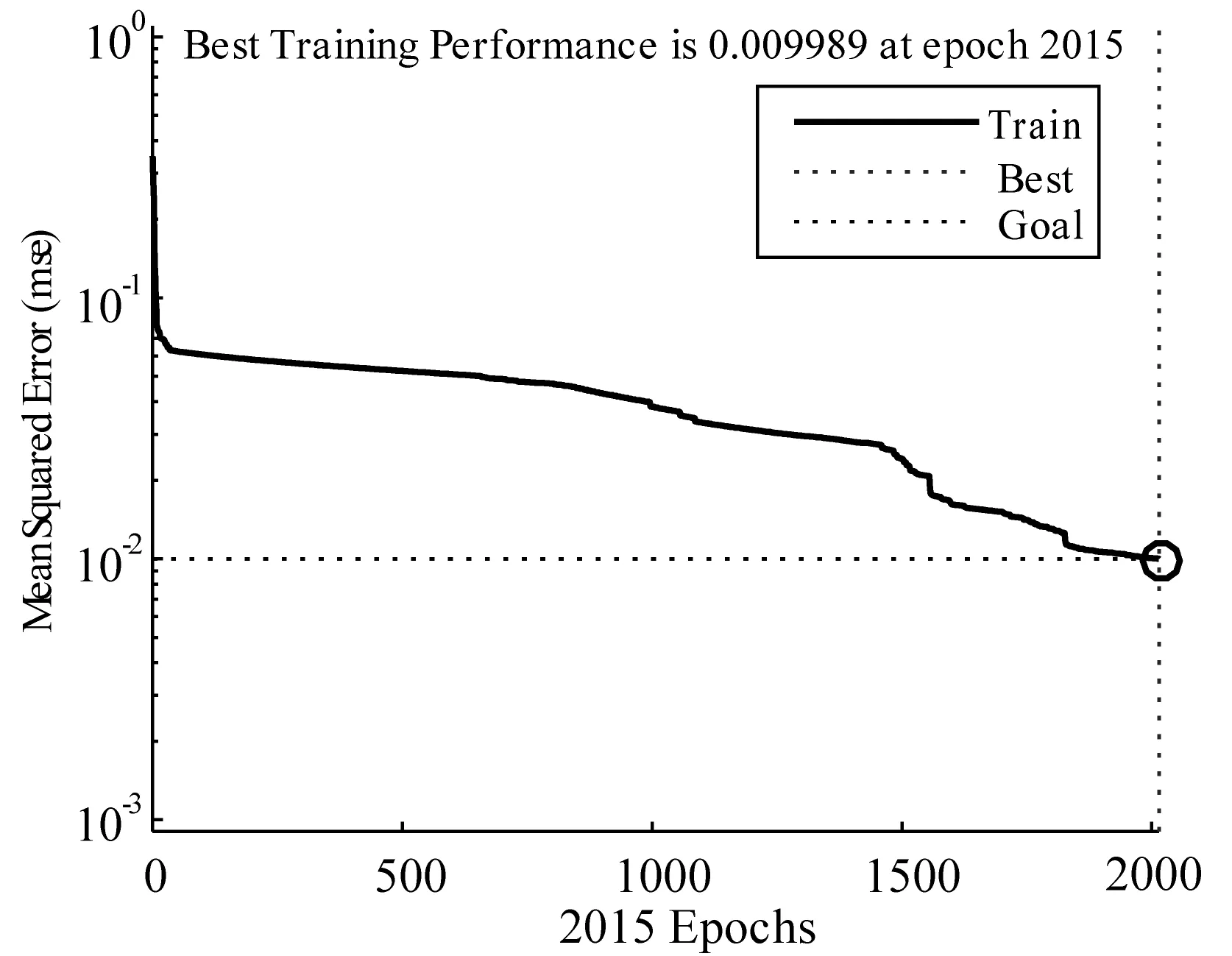
图6 神经网络NN4误差变化曲线
4.3 基本概率赋值的获取
测试样本经由4组BP神经网络得到4组3个[0,1]之间的数值,将每一个BP网络所得的数值归一化处理,即得到该条证据对该命题的基本概率赋值。
4.4 证据合成及对比结果分析
为了说明本文方法的有效性和改进效果,下面对上文中获取的基本概率赋值分别采用经典D-S证据理论合成方法、Yager算法、Murphy算法和本文的改进算法进行证据组合。并对融合结果做比较分析。测试样本经由4种不同算法融合结果,如表3-表6所示。
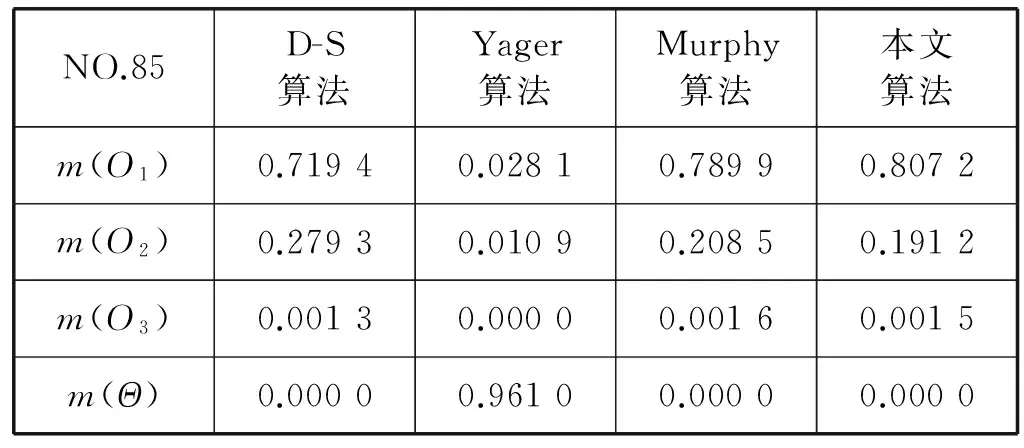
表3 样本85经由四种算法合成结果

表4 样本86经由四种算法合成结果

表5 样本87经由四种算法合成结果

表6 样本88经由四种算法合成结果
4.5 识别结果
若取门限值ε1=0.05,ε2=0.7,根据目标判决准则可以得到四种不同算法的识别结果如表7所示。

表7 四种算法识别结果
注:O1代表攻击舰,O2代表辅助舰,O3代表指挥舰
4.6 结果分析
对于85号和87号测试样本,D-S经典算法、Murphy算法、本文算法都能做出准确目标识别,且本文算法精度最高。而对于86号和88号测试样本,D-S经典算法都做了误判,究其原因,当证据之间高度冲突时,特别是出现了基本概率赋值趋于0的证据,即使后面的证据高度支持此命题,但依据D-S经典合成公式,此命题的概率依然会很小,甚至一直为0。对于Yager算法,由于其不确定命题的基本概率赋值m(Θ)都大于给定的ε2=0.7,因此识别结果都是无法判断。这是因为Yager将支持冲突的基本概率赋值完全归入未知领域,我们无法做出判断。由表7可以看出,Murphy算法和本文算法4次都能做出正确的目标识别,不过结合表3-表6,可以看到本文算法的识别精度都是高于Murphy算法。这是因为Murphy算法仅是对证据进行简单的算术平均,忽略了证据之间的关联性。本文算法,考虑到了证据之间的关联性,提出了信任因子的概念,而且依据严谨的数学推理给出了信任因子的表达式。根据信任因子赋予每条证据相应的权值,再结合D-S公式进行证据合成,因而其识别结果具有更高的准确度。
5 结 语
本文采用BP神经网络,有效解决了基本概率赋值难以获取的问题,且获取过程更符合实际场景。同时,改进的D-S证据理论不仅解决了高冲突度证据的合成问题,而且较其他改进算法有更高的目标识别精度,从而证明了BP神经网络和改进D-S证据理论的结合方法在目标识别应用中的有效性。
[1] Li Y, Chen J, Ye F, et al. The Improvement of DS Evidence Theory and Its Application in IR/MMW Target Recognition[J]. Journal of Sensors, 2016(6):1-15.
[2] Wang P, Shang C X, Han Z Z. Target identification based on evidence theory of improved basic probability assignment[M]// Electronics, Communications and Networks IV.2015:1171-1175.
[3] 王力,白静. 改进的证据理论在多传感器目标识别中应用[J]. 科技通报, 2016, 32(7):134-137.
[4] 孙锐, 孙上媛, 葛云峰. 基于D-S证据理论的基本概率赋值的获取[J]. 现代机械, 2006(4):22-23.
[5] 路艳丽, 雷英杰, 李兆渊. 一种D-S证据推理的BPA获取方法[J]. 空军工程大学学报(自然科学版), 2007, 8(3):39-42.
[6] Huang D Z, Gong R X, Gong S. Prediction of Wind Power by Chaos and BP Artificial Neural Networks Approach Based on Genetic Algorithm[J]. Journal of Electrical Engineering & Technology, 2015, 10(1):41-46.
[7] 吴春华,冯夏云,袁同浩,等. 基于BP神经网络的光伏故障电弧检测方法研究[J]. 太阳能学报, 2016, 37(11):2958-2964.
[8] Wu B, Han S, Xiao J, et al. Error compensation based on BP neural network for airborne laser ranging[J]. Optik-International Journal for Light and Electron Optics, 2016, 127(8):4083-4088.
[9] Yager R R. General approach to the fusion of imprecise information[J]. International Journal of Intelligent Systems, 1997, 12(1): 1-29.
[10] Murphy C K. Combining belief functions when evidence conflicts[J]. Decision Support Systems, 2000, 29(1):1-9.
[11] 李弼程,王波,魏俊,等.一种有效的证据理论合成公式[J].数据采集与处理,2002,17(1):33-36.
[12] Han D, Dezert J, Yang Y. New Distance Measures of Evidence Based on Belief Intervals[C]// International Conference on Belief Functions. Springer International Publishing, 2014:432-441.
[13] Wang H, Li W, Qian X, et al. An Improved Jousselme Evidence Distance[M]// Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems. Springer Singapore, 2016.
[14] 张旭艳,华宇宁,董晔,等.一种基于不变矩的红外目标识别算法[J]. 沈阳理工大学学报, 2016, 35(2):10-13.