基于四杆曲柄滑块机构的可展机构设计
2018-04-17孔凡臣孙建伟张邦成
孔凡臣, 孙建伟,2*, 张邦成,2, 张 炜
(1.长春工业大学 机电工程学院, 吉林 长春 130012;2.长春工业大学 汽车工程研究院, 吉林 长春 130012)
0 引 言
由于运载火箭受到体积和成本的限制,因此,占用空间小、质量轻的可展机构被大量应用于星载天线和空间结构支撑等方面。可展机构具有收拢和展开两种稳定的状态。当机构处于运载阶段时,机构通过折叠收拢的方式来减小自身尺寸,从而使其能够被放置于运载火箭内,当进入预定工作位置时,机构再由收拢状态展开形成星载天线或空间机构支撑结构[1]。
随着航天技术的不断发展,对通讯、卫星定位、对地观测和深空探测等设备的精度和体积提出了更高的要求。对于可展机构的研究已成为机构学的热点研究内容之一。
国内外众多学者围绕该问题进行了深入的研究。比较典型的可展机构有美国TRW公司研制开发的太阳花(Sunflower)天线;剑桥大学可展结构试验室研制的SSDA(Solid Surface Deployable Antenna)以及德国Dornier公司和欧空局ESA联合研制的DAISY(Deployable Antenna Integral System)[2]。廖启征[3]等提出了一种由刚性杆件和柔性铰链组成平面放缩机构的方法,为平面任意形状可展式机构的设计以及机构的惯性力平衡设计提供了一种通用性方法。李端玲[4]等基于球面剪叉单元构造出了各种球面剪叉可展机构,这些机构可保持在球面上运动,具有绕通过球心的轴线转动的特点,有收缩和展开的功能。杨毅[5]等基于7 杆闭环机构提出一种新型四棱锥单元,并将其作为一个基本可展机构单元,设计出了一种全新的大型可展机构,并分析了单元的自由度、运动学和奇异性,给出了机构组合方法与伸缩比计算公式。Deng[6]等给出了基于纯铰链连接设计单环展开/折叠机构的几何方法。系统综合了从5转动副到8转动副的单闭环空间机构构型,进而给出了一系列具有对称运动度的单环展开/折叠机构。Lu[7]等以Hoekens机构为单元提出了一种新型的平面可展/收机构单元,该机构单元可在单一方向上改变其外形轮廓,在运动过程中其另一方向上的长度保持恒定,在此基础上,通过在展收方向上的单元组合获得了大型棱柱型展收机构。基于平面四杆机构的卡丹运动(Cardanic motion),Shieh[8]提出了一个用于综合平面和空间展开机构的系统方法。通过利用平面四杆机构(Cardanic linkages)连杆曲线为一条直线的特点,利用该机构建立了相应的可展机构单元,进而组合成了空间和平面可展机构。
文中将以平面四杆曲柄滑块机构为基础,根据机构轨迹输出和函数输出的特点[9],分别对具有恒定截面的棱柱形可展机构和具有负泊松比的圆形可展机构进行设计。并对其进行机构建模和运动学仿真分析,通过动态仿真验证其运动原理。
1 平面四杆曲柄滑块机构输出数学模型
1.1 轨迹输出
平面四杆机构是结构最简单、应用最广的低副机构,曲柄滑块机构作为四杆机构的一个类型,其机构模型如图1所示。

图1 平面四杆曲柄滑块机构轨迹输出模型
图中,A点位于坐标原点处,AB和BC的杆长分别为l1和l2;P点为连杆BC上任意一点,BP的杆长为l3;滑道中心线与曲柄转动中心的偏离距离为l4;BP与BC的夹角为α;x轴与AB杆夹角为θ1;连杆BC与x轴夹角为θ2。P点轨迹可以表示为xy平面上的一组点的集合,其解析式可写为以θ1和θ2为变量的函数式:
xP=l1cosθ1+l3cos(α-θ2)
(1)
yP=l1sinθ1+l3sin(α-θ2)
(2)
当l1=l2=l3=l,l4=0且α=180°时,如图2所示。
由式(1)和式(2)可得P点在x-y坐标系下的表达式为:
xP=lcosθ1-lcosθ2
(3)
yP=lsinθ1+lsinθ2
(4)
当-90°≤θ1≤90°时,由正弦定理可知θ2=θ1,则由式(3)和式(4)可得:
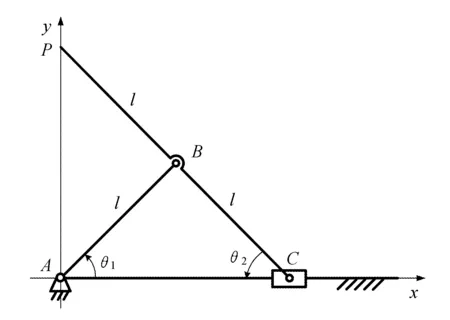
图2 特定尺寸条件下四杆曲柄滑块机构模型
当90°≤θ1≤270°时,由几何关系可知θ2=180°-θ1,则由式(3)和式(4)可得:
xP=2lcosθ1
(7)
yP=2lsinθ1
(8)
将式(7)和式(8)整理可得
(9)
根据式(5)、式(6)和式(9)可以发现,当l1=l2=l3=l,l4=0且α=180°时,曲柄滑块机构的连杆轨迹为一条直线和一个以2l为半径的半圆构成的封闭曲线,如图3所示。

图3 轨迹输出特点
1.2 函数输出
四杆曲柄滑块机构如图4所示。
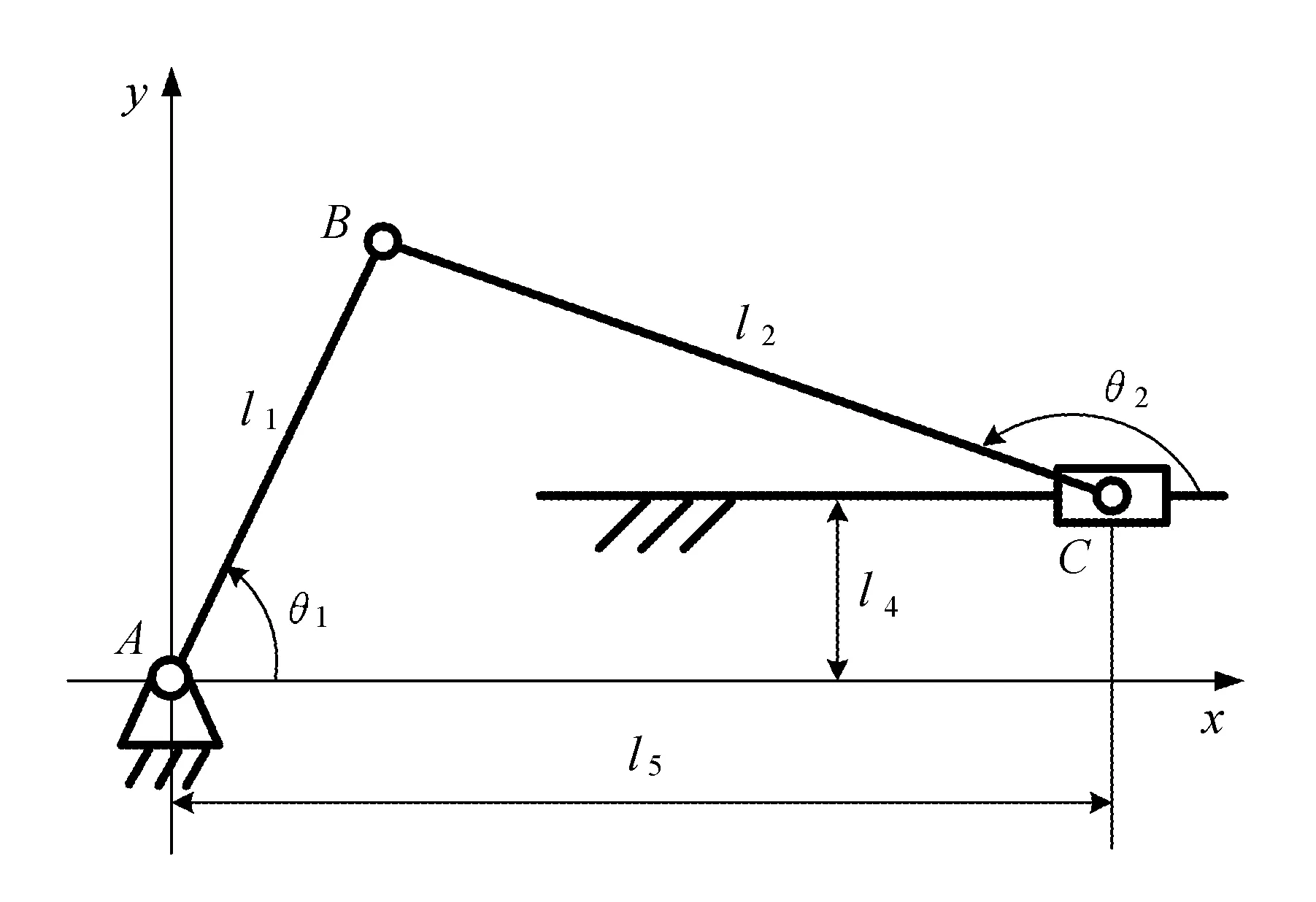
图4 四杆曲柄滑块机构
图中,A点位于坐标原点处,AB和BC的杆长分别为l1和l2;滑道中心线与曲柄转动中心的偏离距离为l4;θ1和θ2分别为杆AB和BC与x轴的夹角;l5为滑块中心C点与A点在x轴方向上的距离。根据几何关系,θ1与l5之间的函数关系为:
l5=l1cosθ1-l2cosθ2
(10)
同理,θ1与θ2之间的函数关系为:
l1sinθ1-l4=l2sin(180°-θ2)
(11)
整理可得:
(12)
当l4=0时,平面四杆曲柄滑块机构函数输出模型如图5所示。

图5 l4=0时平面四杆曲柄滑块机构函数输出模型
由式(12)可得,θ1与θ2之间的函数关系为:
(13)
(15)

2 具有恒定截面的棱柱展开机构
2.1 可展单元结构
通过1.1的运动分析,将图2所示的能够实现直线轨迹输出的曲柄滑块机构作为基本机构来设计,具有恒定截面可展机构单元,恒定截面可展机构单元结构如图6所示。
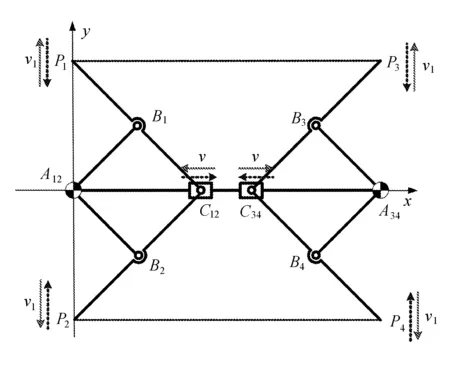
图6 恒定截面可展机构单元简图
在图6中,曲柄滑块机构A12B1C12P1和A12B2C12P2通过共用绞点A12和滑块C12来组成一对展收机构单元;同理,曲柄滑块机构A34B3C34P3和A34B4C34P4通过共用绞点A34和滑块C34来组成一对展收机构单元。将两对机构滑动副共用的导轨组合在一起就构成了文中提出的具有恒定截面特点的可展机构单元,装配形式如图7所示。

图7 恒定截面可展机构单元模型图
当P1和P3的初始位置纵坐标相同时,可展单元在展收过程中P1、A12和P2始终保持在同一直线上,P2、A34和P4始终保持在同一直线上。可展单元包括12个绞点、2个滑动副和10个杆件,根据自由度计算公式可得机构单元的自由度为:
2.风险评估。风险评估是内部控制的首要前提,是在风险识别和预测的基础上,采用定性或定量方法,对风险发生可能性和影响程度进行预计和估算,最终确定风险评级的过程。具体内容包括风险管理组织体系、风险识别和分类、风险评估、风险应对及风险监控与报告等。企业应全面梳理、识别和评估影响目标实现的相关风险,建立本企业风险清单或风险库。针对不同风险,结合本企业的风险偏好和承受度,权衡利弊,按照成本效益原则制定完善相应的规避、降低、分担或承受措施。通常情况下,内部风险可以进行有效防范和控制,外部风险主要采取规避。
F=3n-2PL=3×10-2×14=2
(16)
由于自由度为2,为保证展开和收拢的同步性,将两个滑块与同步带固定后采用同一齿轮输入动力来实现滑块的同步反向运动,同时将单元的自由度降为1(展开与收拢过程见图6)。
由图6可知,单元收拢时的高度为图2中两根连杆BP厚度和一根曲柄AB厚度之和,而单元展开高度近似为4l。
2.2 可展机构单元组合连接
以图6所示的可展机构为基本单元,通过组合就可以构成具有恒定截面的棱柱形可展机构,恒定截面三棱柱可展机构展开过程如图8所示。
图8(a)和(b)分别为三棱柱可展机构收拢状态下的主视图和俯视图。图8(c)~(f)为具有恒定截面三棱柱可展机构的展开过程。从图中可以看出,在机构展开过程中其横截面(图8中三角形框架)始终保持不变。
恒定截面四棱柱可展机构展开过程如图9所示。
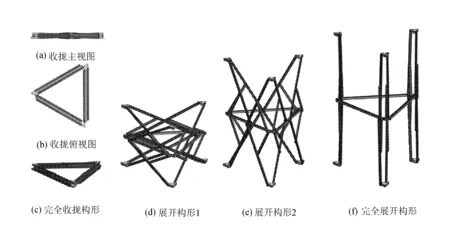
图8恒定截面三棱柱可展机构展开过程

图9 恒定截面四棱柱可展机构展开过程
图9(a)和(b)分别为两段四棱柱可展机构收拢状态下的主视图和俯视图。图9(c)~(g)为具有恒定截面四棱柱可展机构的展开过程。从图中可以看出,在机构展开过程中其横截面(图9中四边形框架)始终保持不变。基于文献[7]的研究成果,为保证图9中上、下两段可展机构的同步展收,文中采用在上、下两段可展机构的连接绞点添加齿轮副实现动力传递。
3 负泊松比可展机构
3.1 负泊松比可展单元结构
通过1.2的运动分析,将图5所示的曲柄滑块机构作为基本机构来设计,具有负泊松比可展机构单元如图10所示。
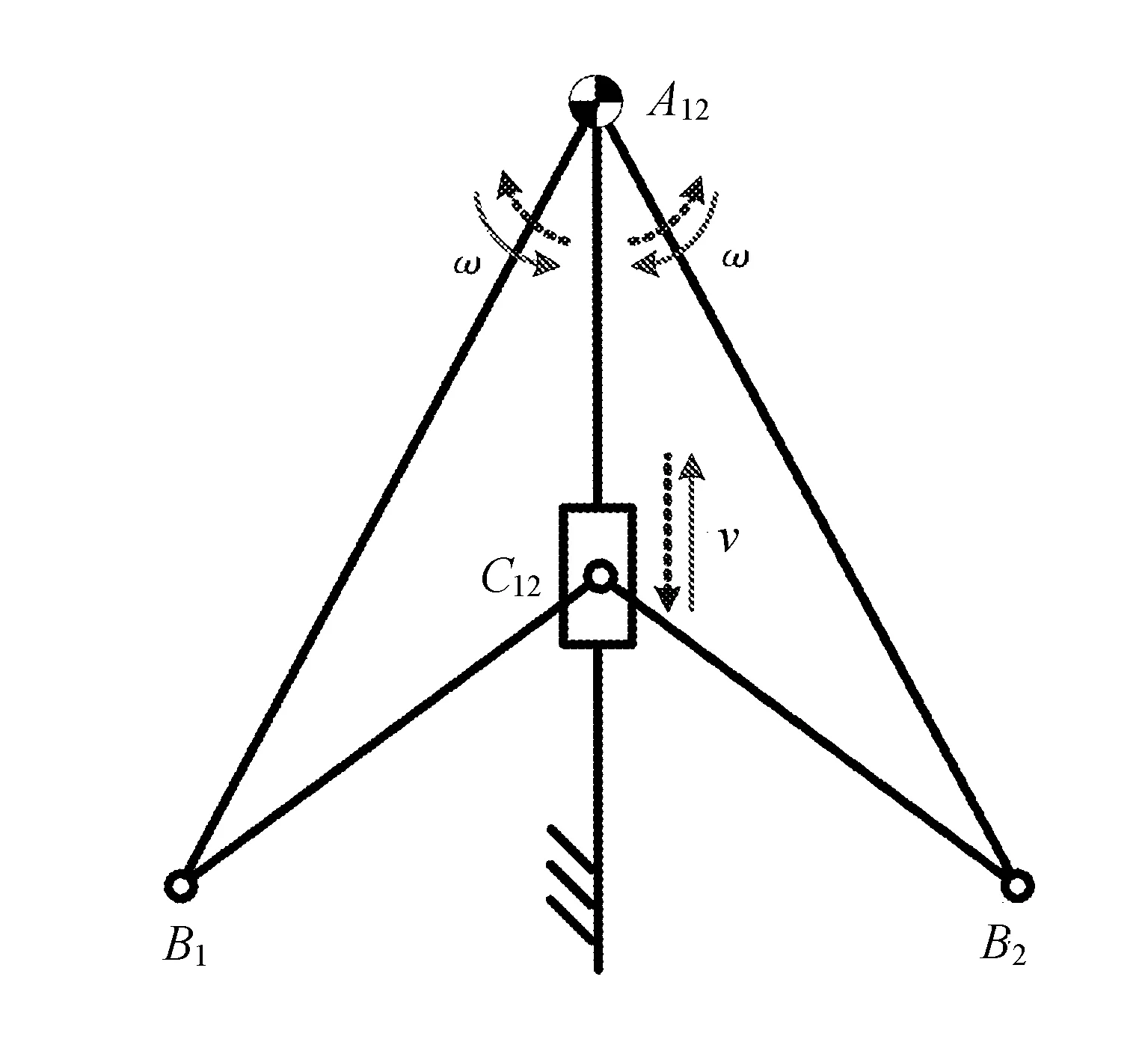
图10 负泊松比可展机构单元简图
在图10中,曲柄滑块机构A12B1C12和A12B2C12通过共用绞点A12和滑块C12来组成一对展收机构单元,装配形式如图11所示。

图11 负泊松比可展机构单元模型图
可展单元包括6个绞点、1个滑动副和5个杆件,根据自由度计算公式可得机构单元的自由度为:
F=3n-2PL=3×5-2×7=1
(17)
由于自由度为1,可展单元需用一个气缸推动滑块实现机构的展开与收拢。
基于图11所示的可展机构单元,文中设计了l1和l2的长度分别为310 mm和490 mm ,3×3单元布局的平板式可展机构。
负泊松比可展机构展收构态如图12所示。

图12负泊松比可展机构展收构态
图12(a)和(b)分别是该机构的收拢和展开状态时的俯视图。从图中可以看出,机构在展开收拢过程中,其尺寸在两个方向上同时增加或减少(由于这种现象与材料学中的负泊松比材料的拉伸膨胀类似,文中定义该机构为具有负泊松比特点的可展机构)。对于可展机构,伸缩比是一个重要的性能指标,我们可以通过对l1和l2长度的调整来实现机构伸缩比和负泊松比的控制。
3.2 圆形可展机构
由于圆形展开面在展开过程中随着半径的增大,展开面的周长也在增大,因此,要求可展机构在展开过程中需要具有负泊松比特点,而传统的可展单元很难实现这一要求。文中以图11所示的可展机构为基本单元,通过组合构成了可以实现圆形展开面要求的负泊松比可展机构,如图13所示。
图13(a)~(d)为该可展机构的展开过程。图13(e)和(f)分别为可展机构收拢状态和完全展开状态下的俯视图。从图13(f)中可以看出,在机构展开后可基本实现近似的圆形展开。
4 结 语
1)给出了通过组合四个曲柄滑块机构来构成具有恒定截面的平面可展机构单元的方法。通过提出的可展机构单元的进一步组合,设计出了具有恒定截面的棱柱可展机构。该可展机构可保证展开过程中保持底座长度不变的要求,并具有较大的伸缩比。此外,通过对棱柱可展机构单元的组合可在其展收方向上形成大型棱柱形可展机构。
2)根据曲柄滑块机构函数输出特点,给出了通过组合两个曲柄滑块机构来构成具有负泊松比特性的平面可展机构单元的方法。通过提出的可展机构单元的进一步组合,设计出了具有圆形展开面的可展机构。并对该可展机构进行了设计和仿真,通过仿真结果可以看出,该结构能够基本实现大尺度圆形展开面的设计要求。
3)文中仅仅基于曲柄滑块机构对两种可展单元进行了初步的结构设计,没有进行相应的运动学分析、展开面强度分析、静力学性能分析和自振频率特性分析。因此在下一步的工作中,将针对以上问题进行进一步分析与研究,进而给出两种可展单元结构的最优参数。

图13圆形可展机构展开过程
参考文献:
[1]A Das, M W Obal. Revolutionary satellite structural systems technology: avision for the future[J]. IEEE Aerospace Conference,Snowmass at Aspen, USA,1998,21(28):57-67.
[2]刘荣强,田大可,邓宗全.空间可展开天线结构的研究现状与展望[J].机械设计,2010,27(9):1-9.
[3]廖启征,李端玲.单层及多层平面图形放缩机构的构造方法[J].机械工程学报,2008,44(6):43-48.
[4]李端玲,张忠海,于振.球面剪叉可展机构的运动特性分析[J].机械工程学报,2013,49(13):1-7.
[5]杨毅,丁希仑.四棱锥单元平板式可展开收拢机构的运动特性分析[J].航空学报,2010,31(6):1257-1265.
[6]Z Q Deng, H L Huang, B Li, et al. Synthesis of deployable/Foldable single loop mechanisms with revolute joints[J]. ASME Journal of Mechanisms and Robotics,2011,3(3):031006.1-031006.12.
[7]S N Lu, D Zlatanov, X L Ding, et al. A new family of deployable mechanisms based on the hoekens linkage[J]. Mechanism and Machine Theory,2014,73:130-153.
[8]W B Shieh. Design of the deployable mechanisms based on the cardanic motion of planar four-Bar linkage[J]. Mechanisms and Robotics Conference, V05AT08A061, Buffalo, New York, USA,2014,38:17-20.
[9]苍鹏,刘文瑞,孙建伟.平面连杆机构轨迹输出的小波分析[J].长春工业大学学报,2015,36(4):433-437.
