导弹尾焰对多频连续波雷达影响研究
2018-03-22,,,
, , ,
(1.中国人民解放军63620部队, 甘肃兰州 732750;2.中国人民解放军63636部队, 甘肃兰州 732750)
0 引言
以丹麦Weibel公司产品为代表的多频连续波测量雷达与传统的抛物面雷达存在较大不同,其前端采用微带平板天线、全固态发射机及低噪声零中频接收机,终端部分采用基于FFT技术的频域测速和多频比相测距方法,实现对测量目标速度、加速度、方位角、俯仰角和距离的实时精确测量,在美国等西方国家广泛应用于弹丸外弹道测量与射表编制。
我国常规兵器靶场引进该体制雷达并成功应用后,导弹武器靶场也逐渐引入。在应用于弹道导弹主动段测量时,雷达多次出现回波信号异常中断及测量数据随机误差超差(以下简称“超差”)等问题,测量精度难以达到设计指标,对靶场测控系统的能力提升没有发挥出应有的作用,也引起了靶场内部对于雷达后续应用的争议。
相较于弹丸测量,导弹尾焰以及目标尺寸是影响导弹主动段测量的重要因素。本文以某型X波段多频连续波测量数据为基础,从微波衰减和测量精度两个方面分析主动段导弹尾焰的影响,确认雷达跟踪测量中异常问题的原因,并依据研究结论提出针对性的应对策略以提升雷达参试效果。
1 导弹尾焰的微波衰减
带有固体发动机的导弹,其飞行弹道按照受力情况可以分为主动段、自由段和再入段。主动段飞行中,燃料在发动机燃烧室里高温燃烧,从喷嘴喷出高温尾气,因高温和化学机制将导弹尾部的空气电离,形成等离子体,成为喷焰羽流。由于温度、气流和气压的变化在羽流中还会产生湍流,使羽流成为多层的复杂结构。当无线电信号穿过喷焰羽流时,等离子体中的带电粒子、中性粒子、自由电子等剧烈碰撞,引起电磁波的反射、散射和吸收,造成信号衰减,噪声增加,信噪比降低。
1.1 微波衰减的规律性现象
对靶场多频连续波雷达参加的不同型号多个批次导弹测量数据进行分析,尾焰微波衰减对雷达回波信号的影响表现出一定规律性。选取某型弹道导弹飞行试验主动段测量数据进行分析,如图1所示为头体分离前40 s雷达回波信号信噪比曲线。
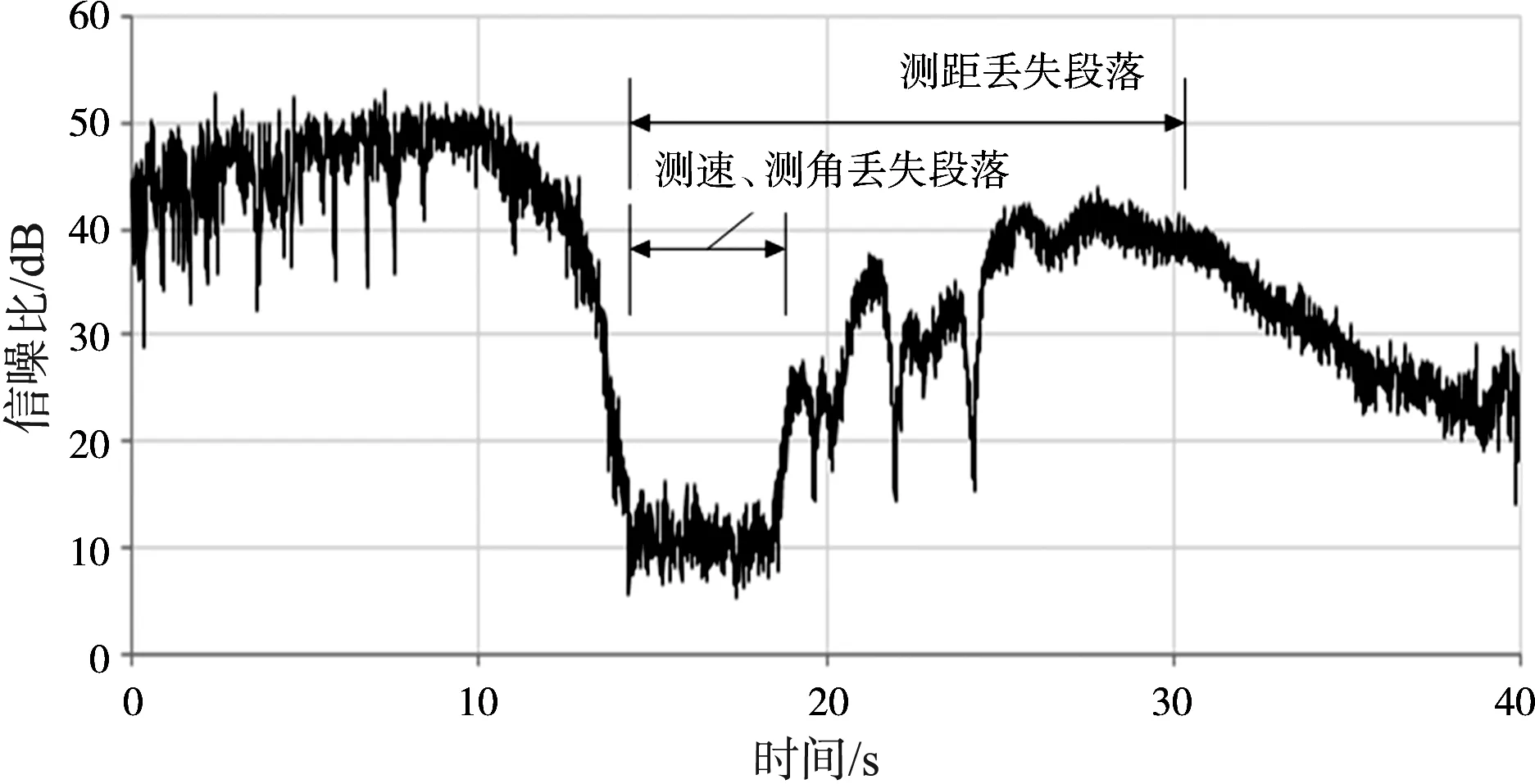
图1 某型弹道导弹主动段雷达回波信号信噪比曲线
图1中,雷达在跟踪测量一段时间后,回波信号信噪比出现快速衰落,当低于捕获门限时,测速、测角、测距等测量数据同时丢失;持续一段时间后,回波信号信噪比逐步回升并有较大起伏;头体分离前一段时间,回波信号信噪比明显下降。
1.2 微波衰减分析
1.2.1 微波衰减值计算
导弹尾焰的微波衰减特性与推进剂配方、发动机工作压力、发动机结构尺寸、微波频率、火焰夹角以及实际飞行环境有关。直接对尾焰中各种离子、粒子、分子等的浓度,自激振荡频率,自由电子碰撞频率等进行微观测试,并采用理论计算方法来计算衰减特性,不仅测试技术难度大,且在工程应用中无法实现[1]。因此利用微波发射天线和接收天线直接将测试电磁波穿过尾焰进行电磁波衰减测试[1-2],测试原理如图2所示。

图2 尾焰微波衰减测试示意图
文献[2]提出分别利用Ku频段(15 GHz)和X频段(8 GHz)微波信号,测试某型固体发动机尾焰直射和斜射(火焰夹角分别为90°和15°)时产生的衰减。测试结果如下:在正常推力时,直射测试15 GHz信号平均衰减为7.7 dB,8 GHz信号平均衰减为8.5 dB,斜射测试15 GHz信号平均衰减为20 dB。斜射时测试信号穿越的路径长,而且喷焰内部温度和电子密度不均匀,中间温度高,外部温度低,一层层有变化,导致微波信号反射很大,还可能有多次反射,因此斜射时衰减会比直射情况大很多。另外,由于尾焰的高速喷出、喷焰飘动及二次燃烧等因素影响,在斜射部分衰减有较大起伏,最小2~3 dB,最大5~8 dB。
靶场多频连续波雷达工作频段在10 GHz附近,且采用反射方式跟踪目标。以上述测试数据为参考,计算导弹尾焰对多频连续波雷达的衰减:当雷达位于侧后方跟踪时,导弹尾焰微波衰减值平均大于40 dB,在考虑起伏的情况下,衰减范围为24~56 dB。
1.2.2 火焰夹角对微波衰减的影响
根据导弹理论弹道以及雷达站址坐标,计算飞行试验中与图1对应的雷达火焰夹角曲线,如图3所示。考虑到飞行中导弹飞行姿态、高程等不会完全等同于理论值,因此计算结果与实际任务之间会有一定偏差。
飞行过程中导弹相对于雷达的位置不断发生变化,雷达火焰夹角相应变化。火焰夹角变化首先会引起导弹弹体RCS变化[3],而从图1、图3中0~10 s火焰夹角及回波信号信噪比变化来看,弹体RCS变化不会引起信噪比的明显变化。此外,导弹尾焰体积会随着飞行高度的增加相应增大,而雷达工作频点在10 GHz附近,尾焰对导弹RCS面积的影响基本可以忽略[4]。因此,主要分析火焰夹角对微波衰减的影响。

图3 某型弹道导弹主动段雷达火焰夹角曲线
对比分析图1与图3可知,导弹尾焰微波衰减与雷达火焰夹角之间存在一定的关联:
1) 导弹起飞后雷达火焰夹角逐步减小,当火焰夹角小于一定角度(约3°)时雷达回波信号信噪比出现明显衰落;当火焰夹角继续减小至最小值(约0.7°)附近时,回波信号信噪比降至门限电平以下,测量数据中断。
分析历次任务数据发现,当导弹主动段中火焰夹角最小值低于某一角度(目前试验样本中该值约为1°)时,雷达回波信号信噪比必定会出现大幅下降现象,下降幅度范围为25~35 dB(回波信号信噪比低于冷空噪声时,无法准确计算信噪比下降数值),与上一节计算数据基本吻合。
2) 雷达火焰夹角由小变大的过程中,在火焰夹角大于一定角度(约2°)之前,回波信号持续受影响,持续时间因导弹型号、批次的不同而有所不同;随着火焰夹角的继续增大,尾焰微波衰减减小,回波信号信噪比出现跃变并逐步回升,雷达重新完成捕获。
文献[5-6]中指出,复杂目标可以视为由大量的独立反射体组成,雷达接收机测得的信号是雷达方向各个反射目标回波信号的矢量和。各个信号相对相位和幅度可能互相叠加,也可能互相完全抵消,通常是介于完全叠加和完全抵消之间;由于目标各部分反射体之间的间距远大于雷达波长,在雷达接收机处各反射信号的相位将随观测方向而变,引起回波信号闪烁,这种只由目标本身产生的起伏称为目标噪声。导弹本身尺寸较大,属于复杂目标,分析信号回升中出现的较大起伏现象为尾焰微波衰减与目标噪声中的幅度起伏(幅度闪烁)[5]叠加所致。该现象在不同类型导弹、不同布站雷达中均存在。
导弹头体分离前30~40 s的回波信号信噪比降低现象,经计算为空间衰减产生的正常变化。分析雷达数据发现,该时间段内导弹幅度起伏较大时,容易引起测量数据中断。
2 导弹尾焰对雷达测量精度的影响
由于导弹尾焰中自由电子分布不均匀,雷达信号通过喷焰区时,向不同方向折射、散射并产生相互干涉,除造成衰减外,还会产生相移和调幅调相噪声,给雷达测量带来误差,且信号穿过喷焰区的路径越长,影响越大。
2.1 对测速数据影响
2.1.1 多普勒测速原理
雷达采用多普勒测速,其原理如图4所示。发射机经发射天线发出频率为f0的连续波信号,目标以线速度V运动,目标线速度方向与雷达至目标径向速度Vd方向的夹角为α,则接收信号的频率为f0+fd。其中,fd是由于目标以径向速度Vd运动所产生的多普勒频率。
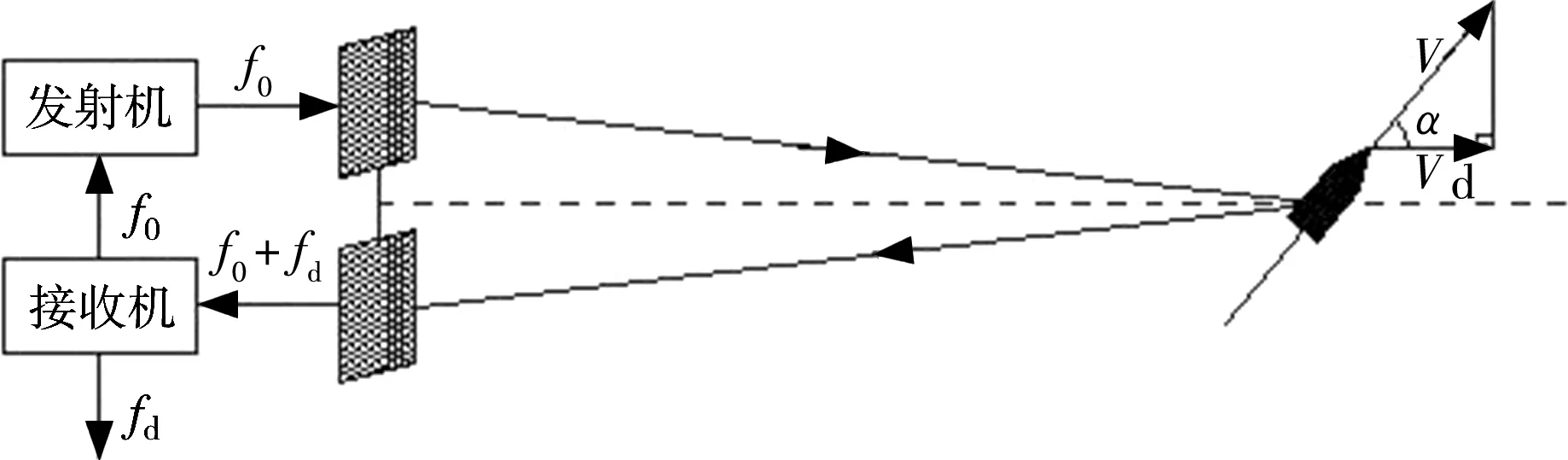
图4 多普勒测速原理示意图
雷达终端采用频域FFT频谱分析的方法,提取运动目标所产生的多普勒频率,从而得出目标的径向运动速度:
(1)
式中,c为光速,并有关系Vd=V·cosα。
2.1.2 测速数据分析
以弹载GPS差分数据为基准,对雷达测速数据进行分析,修正系统误差后的雷达测速数据与GPS差分数据吻合,主动段全程随机误差不同程度超差。另外,将不同任务中测速数据随机误差、雷达火焰夹角、接收信号信噪比进行综合分析,可以发现以下3个时间段/点超差现象明显: 1) 信噪比起伏接近或超过20 dB时刻; 2) 尾焰微波衰减影响明显时段; 3) 导弹头体分离前时段。
由式(1)可知,多普勒频率fd变化会导致测速数据变化,而雷达回波信号相位上的变化反映到频域上会产生频移和展宽,从而导致雷达终端通过FFT频谱分析测得的fd发生变化。
导弹作为复杂目标,飞行时相对于雷达的方向发生变化,雷达接收机接收的回波信号相位和幅度会随之变化[5]。大部分时间段内测速数据随机误差是设计指标的1~4倍,分析原因为各反射目标回波信号相对相位介于完全叠加和完全抵消之间,相位变化较小;个别时刻随机误差是设计指标的10倍以上,此时信噪比下降接近或超过20 dB,分析原因为相对相位接近完全抵消,相位变化较大。
在尾焰微波衰减影响明显时段内,若信噪比变化相对平稳,随机误差是设计指标的1~4倍,与其他时段基本相同;若信噪比变化超过10 dB,对应时刻随机误差是设计指标的10倍以上。分析原因,导弹尾焰本身对雷达回波信号相位影响有限,但当尾焰影响与幅度起伏同时作用时,会造成回波信号相位较大变化,测速数据超差。
导弹头体分离前发动机接近关机,出现燃料燃烧不均匀、火焰回卷等现象,雷达信号穿越尾焰以及燃料未完全燃烧形成的烟尘造成较大相移,导致测速数据出现更大程度的超差。
2.2 对测距数据影响
2.2.1 多频比相测距原理
雷达采用多频比相原理测量雷达到目标的斜距,其测量原理如图5所示。
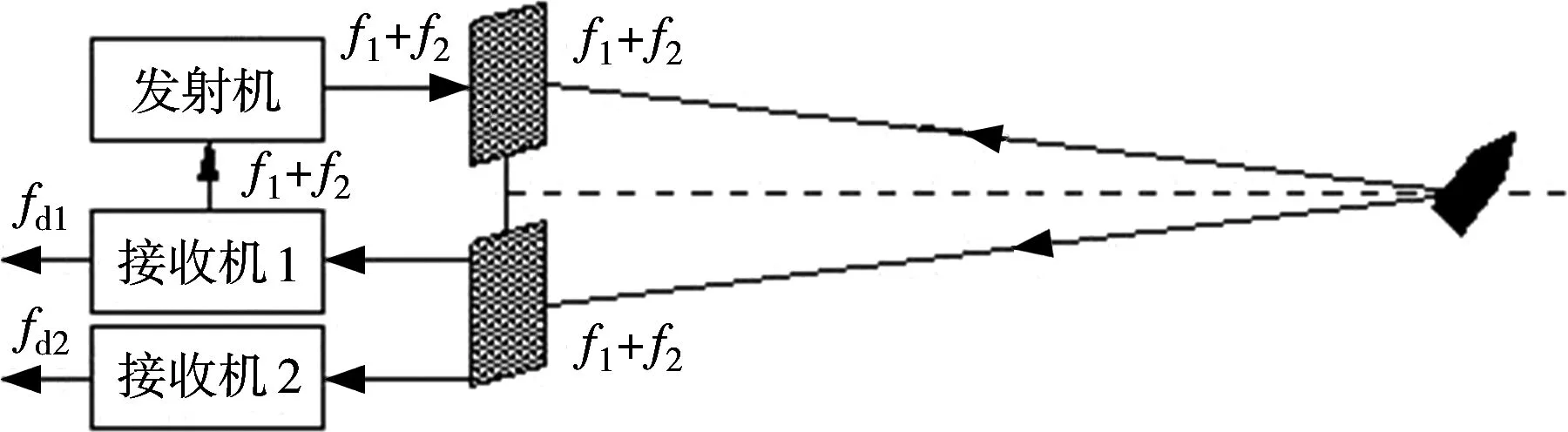
图5 多频比相测距示意图
测距时雷达同时发射频率为f1和f2的两个信号。接收的两个信号同时由目标反射,并同时被同一接收天线接收。在接收机1中,从接收信号中减去频率f1可得到多普勒频率fd1。在接收机2中,从接收信号中减去频率f2得多普勒频率fd2。测量fd1和fd2两个多普勒频率相位差θ,这样在t0时刻,便可由下式计算出雷达天线至目标间的斜距R0:
(2)
式中,c为光速, Δf=f1-f2为两个测距频率的差频,θ为在t0时刻多普勒频率fd1和fd2之间的相位差。
连续波测距时,测距精度与最大不模糊距离是一对矛盾。因此雷达采用多频测距体制,即分时、顺序发射多组差频,分别接收后,计算出对应的多个相位差。利用解模糊技术,对多个相位值进行求解,得到目标距离的最佳估值。
2.2.2 测距数据分析
分析雷达测距数据发现,测距数据与弹载GPS差分数据吻合,但在两个时间段内存在明显超差: 1) 尾焰微波衰减影响明显时段; 2) 导弹头体分离前时段。
由式(2)可知,多频比相测距是通过测量两个回波信号的相位差来实现的,f1或f2信号变化都可能引起测量结果的变化。导弹幅度起伏会对不同频率信号相位差造成不同的影响。测速数据随机误差较大(超过10倍),对应回波信号f1相对相位接近完全抵消,因此测距数据随机误差超差;若另一差频信号f2相对相位接近完全抵消,就会出现测距超差但测速超差不明显的现象。
由于雷达多组差频频率设置相差一般不超过2 MHz,在导弹尾焰本身对雷达回波信号相位影响有限情况下,尾焰造成的相位差变化可以忽略;当导弹尾焰对回波信号相位影响较大时,则会引起雷达差频信号间的相位差变化。因此导弹头体分离前,测距数据会出现更大程度的超差。
另外,目标相对于雷达的方位改变时,会引起雷达反射的视在中心由一点漂移到另一点,从而引起噪声或角跟踪颤抖,形成角度起伏,又称角闪烁[5]。远距离小目标产生的角度起伏,大多数情况下影响很小;对于导弹这类较大目标,角度起伏是限制跟踪精度的主要因素。而雷达在应用中与可见光/红外光学跟踪装置组成光雷一体化跟踪测量系统,充分利用光学精密测角、稳定跟踪性能,避免了角度起伏对测距精度的影响。
2.3 对测角数据影响
2.3.1 比相测角原理
雷达采用单脉冲比相测角,原理如图6所示,用上、下(或左、右)两个接收天线接收目标的回波,由雷达从发射到两个接收天线的路径差,计算出两个多普勒信号的相位差为
(3)
两个多普勒信号经FFT变换后得到其频谱。取输出频谱幅度最大的FFT滤波器输出的幅角为多普勒信号相位的估值,由两个接收天线的多普勒信号的相位之差,即可求出目标视线相对于天线法线的夹角,即误差角:
(4)
由于目标视线角很小,可近似为
(5)
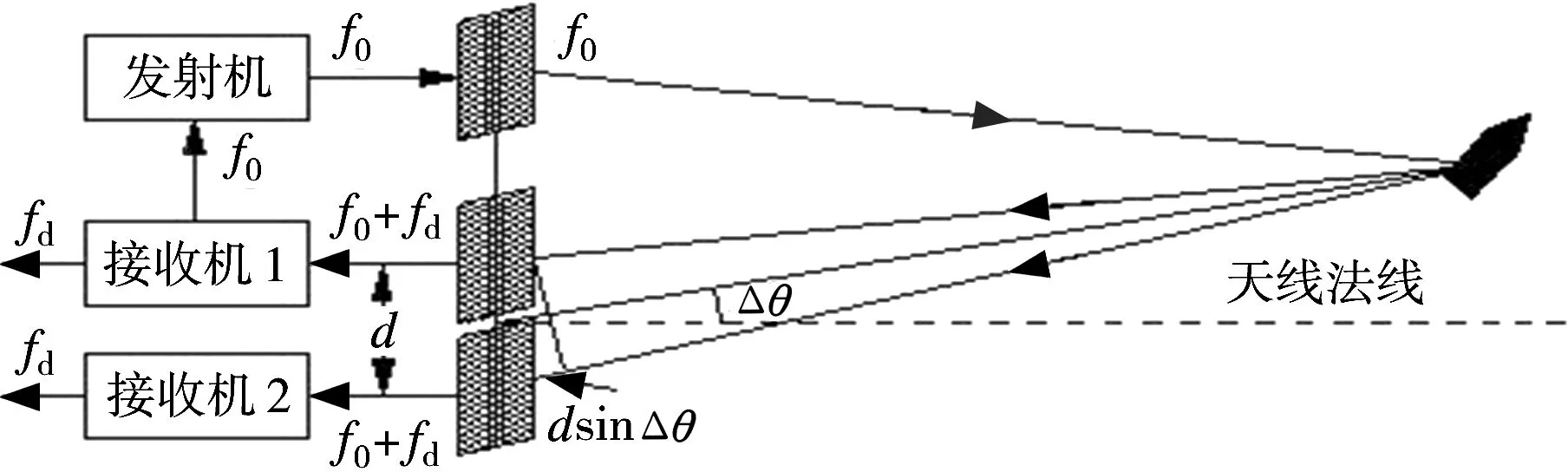
图6 比相测角原理示意图
2.3.2 测角数据分析
同样以弹载GPS差分数据为基准分析,导弹尾焰对雷达测角数据影响无明显表现,但在导弹头体分离后出现随机误差明显增大现象。
由于导弹距离雷达较远,可以认为到达雷达不同接收通道的信号穿越导弹尾焰的路径一样,因而信号相位差Δφ保持不变,由式(5)可知,测角数据精度不受尾焰影响。
与测距数据一样,雷达与光学的结合避免了角度起伏对测角精度的影响。
导弹头体分离后,雷达波束内同时存在弹体和弹头两个目标。由于弹体RCS明显大于弹头RCS,雷达出现跟踪弹体现象,引起测角数据超差。
3 研究结论
综合前面分析,可以得出如下结论:
1) 导弹尾焰和幅度起伏是导弹主动段测量中数据中断的主要原因。
导弹主动段测量中,当火焰夹角低于某一角度(约1°)时,尾焰会造成25~35 dB的微波衰减,导致雷达回波信号低于捕获门限,测量数据长时间中断。
另外,导弹头体分离前距离增加造成的空间衰减使雷达回波信号信噪比快速降低,此时导弹自身幅度起伏可能导致雷达回波信号低于捕获门限,测量数据闪断。
2) 导弹尾焰和幅度起伏是导弹主动段测量中数据超差的主要原因。
发动机正常工作时,导弹幅度起伏是影响测量精度的主要原因,在回波信号相对相位接近完全抵消时刻测速、测距数据明显超差,导弹尾焰在火焰夹角(约3°)较小时会加大超差程度。
发动机接近关机时,导弹尾焰影响明显,与幅度起伏共同作用使测速、测距数据出现明显超差, 火焰夹角越小超差越大。
雷达与光学的结合应用,避免了导弹角度起伏对测量精度的影响。
3) 多频连续波雷达用于导弹主动段测量完全可行。
虽然受导弹尾焰以及目标噪声影响,雷达测量精度难以达到设计指标,但从数据处理情况来看,雷达测量数据经过筛选、拼接处理后仍然可以达到较高的精度,可以作为靶场测控的有益补充。
4 应对策略及效果
针对导弹尾焰影响,采取优化雷达布站点位、任务参数设置以及多站联合测量等方法发挥雷达效能、改善雷达整体任务情况。
1) 优化布站点位选择
采取反射式跟踪的多频连续波雷达比应答式雷达更容易受到导弹尾焰影响。在选择布站点位时,可以提前计算雷达火焰夹角,选择火焰夹角大于一定角度(如6°)的点位,以降低导弹尾焰对雷达信号的影响。
任务中根据雷达火焰夹角计算安排同型号雷达在不同点位参试,在设备状况、参数设置及跟踪策略一致情况下,当火焰夹角较大时,雷达获取了导弹头体分离前更多测量数据,测量数据随机误差也得到明显改善。
2) 优化雷达参数设置
雷达数据分析中发现个别任务存在信噪比大幅下降但测量数据没有中断的情况,此时雷达接收信号信噪比保持在捕获门限以上。通过优化雷达参数设置提高雷达接收信号信噪比,使雷达即使受导弹尾焰衰减或幅度起伏影响仍保持捕获状态。
在避免接收机饱和的前提下,合理设置雷达发射衰减和视放增益,尽量提高雷达接收信号信噪比;雷达信号处理参数上选择较大的积分时间、采样点数。应用该方法,雷达在后续测量中提供了更多有效数据。
3) 多站联合测量
通过两台或多台雷达的合理布站,互补形成完整弹道,实现对导弹主动段的覆盖测量,有效降低导弹尾焰及目标噪声影响。
除此之外,雷达与光学结合可以有效发挥光学精密测角、稳定跟踪性能和雷达精准测距性能,在有效应对导弹尾焰以及目标噪声、头体分离影响等方面发挥了重要作用,在靶场实际应用中取得了良好效果。
5 结束语
多频连续波雷达应用于弹道导弹主动段测量是靶场为提升测量能力开展的一次尝试,而具体应用中的诸多问题给这一尝试增加了不确定性。本文通过理论与数据的结合,研究分析了导弹尾焰对雷达回波信号电平及测量精度的影响,实现了问题原因定位,提出的解决措施使多频连续波雷达参试效果得到显著改善,也为雷达研制改进提供了有益借鉴。下一步主要是研究发挥雷达在不同任务场景下测量能力,真正使多频连续波雷达成为光学交会、GPS差分外又一高精度测量手段。
[1] 任泌青,宫秀良,程博,等. 固体火箭发动机尾焰电磁波衰减试验验证技术研究[J]. 计算机测量与控制, 2016, 24(11):249-252.
REN Miqing, GONG Xiliang, CHENG Bo, et al. Study on Experimental Verification Technology of Electromagnetic Wave Attenuation for Solid Rocket Motor Plume[J]. Computer Measurement & Control, 2016, 24(11):249-252.(in Chinese)
[2] 邓明纫,王公森,唐剑,等. 喷焰羽流微波衰减的测试[C]∥2007计量与测试学术交流会, 北京:中国宇航学会, 2007:381-386.
[3] 丁鹭飞,耿富录. 雷达原理[M]. 3版. 西安:西安电子科技大学出版社, 2002:141-144.
[4] 郭德阳,陈建文,吴瑕. 弹道目标尾焰特性探究[J]. 雷达科学与技术, 2014, 12(1):106-111.
GUO Deyang, CHEN Jianwen, WU Xia. Research on Characteristics of Tail Flame of Ballistic Target[J]. Radar Science and Technology, 2014, 12(1):106-111.(in Chinese)
[5] SKOLNIK M I. 雷达系统导论[M]. 3版. 左群声,徐国良,马林,等译. 北京:电子工业出版社, 2014:28-45, 140-148.
[6] SKOLNIK M I. 雷达手册[M]. 3版. 南京电子技术研究所, 译. 北京:电子工业出版社, 2010:369-378.
