一种交叉足竞走机器人机械结构的设计与研究
2018-03-17唐瑜谦
摘要: 本文设计了一种交叉足竞走机器人的机械结构,该机器人能够模拟人的左右腿进行行走,主要结构包括机器人的顶板、腿部结构、连接结构、脚板等机械机构,并绘制了该机器人的CAD模型和三位立体模型。通过对该双足竞走机器人的设计和制作,并进行了运行试验,该机器人能够完成相应的稳定行走动作,该机械结构能够有效应用于教学、竞赛等领域。
Abstract: This paper designed the mechanical structure of the cross foot walking robot, and the robot can simulate people around the leg to walk. The main structure comprises the robot roof, leg structure, connection structure, mechanical foot mechanism, and the CAD model of the robot and three-dimensional model are proposed. Through the design and manufacture of the cross foot walking robot, and running test are given. The robot can complete the corresponding stable walking action, and the mechanical structure can be effectively applied to teaching, competition and other fields.
关键词: 交叉竞走机器人;机械结构;减速伺服电机
Key words: cross foot working robot;mechanical structure;deceleration servo motor
中圖分类号:TG580.23+1 文献标识码:A 文章编号:1006-4311(2018)08-0148-02
0 引言
仿人机器人技术融合了机械设计、结构设计、模型分析、控制技术、计算机技术等,仿照人的运动机理,进行机器人的设计和研究。机器人的机械结构作为机器人最重要的基础设计,通常使用CAD、Soildworks等软件进行整体机械机构的设计。仿人机器人能够模仿人的动作,在机器人研究领域中有着重要的理论研究价值,并且相关研究成果与现实社会联系紧密,有着不可忽视的现实意义[1-2]。目前的机器人的研究中,双足机器人的设计具有重要研究意义和使用价值,仿人型双足行走机器人可以大大地帮助人类解决很多问题,比如驮物,抢险,等一系列危险或繁重的工作[2]。
基于以上研究意义和价值,本文设计了一种交叉足竞走机器人的机械结构[3-4],该机器人只设计机器人的双腿结构。该机器人能够模拟人的左右腿进行行走,主要结构包括机器人的顶板、腿部结构、连接结构、脚板等机械机构,并绘制了该机器人的CAD模型和三位立体模型[5-6]。本文首先介绍了交叉竞走机器人的总体结构设计,并给出了机器人的总体结构三维模型立体图,然后对机器人的机械结构的设计进行描述和分析,包括机器人的顶板和脚板详细设计、机器人腿部结构的详细设计。最后通过运行试验,验证了本文所设计的交叉足竞走机器人的合理性和有效性。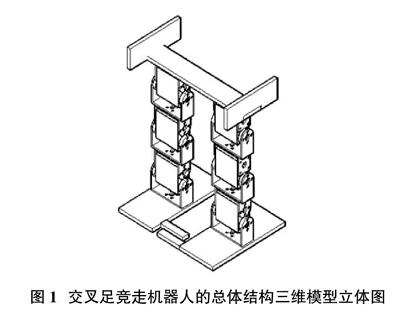
1 交叉足竞走机器人的总体结构设计
交叉足竞走机器人的总体结构三维模型立体图如图1所示,包含交叉足竞走机器人的顶板、机器人左腿、机器人右腿、机器人的左脚板、机器人的右脚板。交叉足竞走机器人左腿和右腿均为一个3自由度的结构构成,每一个自由度由一个金属结构件和一个伺服电机组成;机器人的顶板为一个U型结构,方便放置单片机控制器和7.4V直流电源;机器人的脚板为带齿结构,前端和后端均有一个长方形小齿,实现机器人的稳定前后交叉运行。
2 交叉足竞走机器人机械结构设计
2.1 机器人的顶板和脚板
交叉足竞走机器人的顶板和脚板如图2所示,2(a)为机器人的顶板的俯视图,2(b)为其中一个脚板的俯视图,两个脚板为一个对称结构。为了方便设计和加工,本文采用2mm的黑色的亚克力板作为材料来制作和加工,因为亚克力板是轻型高硬度材料,易于切割和打孔。
2.2 机器人腿部结构
交叉足竞走机器人腿部结构如图3所示,图3(a)为机器人的正视图,3(b)为机器人的侧视图。交叉足竞走机器人腿部结构包含左腿和右腿,每条腿均由一个3自由度的结构构成,每一个自由度由一个金属结构件和一个伺服电机组成。每个自由度代表一个关节,每个关节可以实现0-180度的旋转,实现机器人行走动作的模拟。通过该结构的设计,可以实现机器人的前进、后退、前跟头,左转、右转等动作。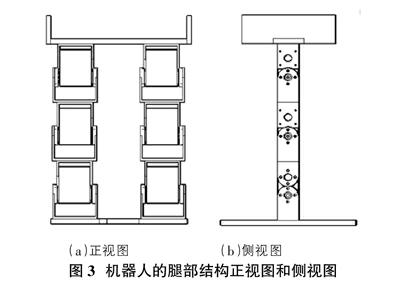
2.2.1 伺服电机
本文设计的交叉足竞走机器人选用伺服电机来实现和模拟人的关节运动。伺服电机的好坏决定了机器人行走的质量,为了保证机器人的运行平稳、执行到位,通常选用扭力在12-15kg左右的伺服电机,结构件的尺寸与型号决定的关键是在于舵机的尺寸型号,所以制作机器人要优先决定好舵机的尺寸与型号。
本伺服电机选用双轴伺服电机,包含一个主动轮和一个从动轮,相关参数见表1。该伺服电机的重量为60g,尺寸大小为40*20*40.5mm,速度为0.16sec/60°7.2V,堵转扭矩为15kg/cm 7.2V,工作电压为5-7.2V,工作电流>100mA。其中主动轮的舵盘的安装孔间距为14mm,直径为20mm,其中花齿孔径5.5mm,花齿数量25,使用4个M3攻丝安装孔。
2.2.2 金属结构件
金属结构件主要用于机器人关节的连接,固定于交叉足竞走机器人的顶板、脚板和伺服电机上。结构件大小和尺寸的设计取决于伺服電机的尺寸和大小。为了便于结构简的设计和加工,交叉足竞走机器人的结构件采用铝材的作为材料进行制作,铝材具有硬度高、质量轻、易加工等优点。结构件的尺寸如图4所示,长度为52mm,宽度为25mm,高度为42.5mm,厚度为2.5mm。
3 机器人的结构分析与实验
基于上面交叉足竞走机器人的设计,为了验证本文所设计的交叉竞走机器人设计的合理性、稳定性和可行性,通过机器人的直走、前滚翻、后退、左转弯、右转弯等动作完成率,来进行运行试验分析。
通过每个动作的20次试验,动作完成情况和完成率如表2所示,该结构机器人实现直走的后退动作的完成率均为100%,完成左转弯和右转弯的完成率为90%,完成前翻动作的完全率为80%。虽然本文所设计的机器人结构不能在20次试验中,100%完成所有的动作,但是受限于只有双足结构,一定程度上是符合设计要求的。本文所设计的交叉足竞走机器人能够有效完成的机器人相应的动作,该机器人能够完成相应的稳定行走、后退等动作,该机械结构能够有效应用于教学、竞赛等领域。
4 结论
本文设计了一种交叉足竞走机器人的机械结构,该机器人能够模拟人的左右腿进行行走,主要结构包括机器人的顶板、腿部结构、连接结构、脚板等机械机构,文中给出了该机器人的CAD模型和三位立体模型。通过对该双足竞走机器人的设计和制作,并进行了运行试验,该机器人能够完成相应的稳定行走动作,证明了该机械结构的有效性和合理性。由于本文设计的交叉足竞走机器人只有双足结构,存在一定的问题,可以通过进一步的设计和改进,实现100%完成相关的动作,可以广泛应用于教学、竞赛等领域。
参考文献:
[1]崔庆权,尹逊和,唐瑜谦.一种竞赛型双足竞步机器人设计与研究[J]. 电子测量技术,2015(11):96-99.
[2]崔庆权.一种双层头部结构的双足机器人:CN 205256500 U[P].2016.
[3]朱开波,等.机械工程基础[M].西南交通大学出版社,2015.
[4]王占军,赵玉刚,刘新玉.直角坐标型机器人机械结构与控制系统的设计[J].制造业自动化,2015(4):18-19.
[5]林悦香,潘志国,刘艳芬.工程制图与CAD[M].北京航空航天大学出版社,2016.
[6]封金祥,姜隆,史晓君.机械制图与CAD[M].北京理工大学出版社,2016.