基于超高频RFID双天线双标签对照的果园单轨运输机定位
2018-03-09吕石磊梁尹聪王建华王卫星
吕石磊,梁尹聪,李 震,4,王建华,王卫星
基于超高频RFID双天线双标签对照的果园单轨运输机定位
吕石磊1,2,梁尹聪3,李 震1,2,4※,王建华1,王卫星1,2
(1. 华南农业大学电子工程学院,广州 510642;2. 广东省农情信息监测工程技术研究中心,广州 510642;3. 华南农业大学工程学院,广州 510642;4. 国家柑橘产业技术体系机械化研究室,广州 510642)
针对果园单轨运输机在轨位置精准感知的应用需求,该文基于超高频射频识别技术(radio frequency identification, RFID)接收信号强度数据进行了运输机定位试验研究。该研究通过分析RFID通信特征,设计了RFID双天线双标签对照的运输机定位方法,构建了能量传输定位模型和路径损耗定位模型;通过阅读器单天线试验,得到当前RFID设备的安装参数,确定了阅读器天线与轨道标签之间的最优垂直距离为20 cm,双标签之间的最优水平在轨距离为45 cm;通过双天线试验及数据分析,得到适用于试验环境的最优定位模型系数。试验结果表明,该研究提出的定位模型能够有效降低噪声干扰,减少定位误差。RFID设备在最优定位参数条件下,使用路径损耗定位模型得到的最小定位误差均值为1.007 0 cm。该研究验证了基于超高频RFID对果园单轨运输机定位的可行性,提升了运输机运行安全性和可靠性。
农业机械;运输;果园;单轨运输机;RFID;RSSI;定位
0 引 言
中国岭南地区盛产荔枝、柑橘等岭南佳果,受区域地形地貌影响,果园多分布在丘陵山地中。山地果园立地条件较差,地势起伏不平,植保作业、农资和果品运输主要依靠人工或小型农用车等运送方式,劳动强度大、人工费用高,作业环境存在安全隐患[1-2]。普通的轮式或者履带式拖拉机不适宜在大坡度山地果园中作业,难以形成完善的交通运输网络[3]。单轨运输机具有爬坡能力强、转弯半径小、可靠性高等特点,适用于山地果园的运输作业[4]。日本、韩国等正在逐步普及单轨运输机作为山地果园的主要运输工具[5-7]。近年来,中国加大对农业设施的支持力度,已成功研制出包括柴油机驱动式[8]、电牵引式[9]和电驱动式[1]等不同类型的单轨运输机。
当前,单轨运输机的机械理论与应用方面已日趋成熟。在山地果园中,轨道沿山势搭建,运输机穿梭作业时极易受到果树遮挡,导致操作人员无法全程实时遥控运输机。单轨运输机应具有自主到达指定方位的功能,这是实现精准农业的必要前提,而精确感知自身在轨位置是实现运输机自主运行的关键。目前,农机位置测量技术主要采用相对位置测量和绝对位置测量2种方法[10]。其中,机器视觉是相对位置测量方法的典型代表,利用图像处理技术确定导航基准线,进而测量农机与作物的相对位置,具有测量速度快,定位精度高等特点[11-14]。但该类定位技术应用成本较高,测量结果受光照和枝叶遮挡等影响,不适用于密集种植的果园。绝对位置测量方法主要基于全球导航卫星系统,包括美国全球定位系统和中国北斗系统等[15-17]。该类定位系统适用于大区域平整农田中的农机定位,山地果园中果树树冠及地势变化均对其信号传播造成严重影响,从而定位精度受限。
射频识别技术(radio frequency identification, RFID)因安全性高,抗污损能力、环境适应性强及非视距通信等特点,在食品质量安全溯源、信息采集和信息管理等农业领域得到了快速应用与推广,被列为实现农业物联网的关键技术之一[18-20]。其中,基于接收信号强度(received signal strength indicator, RSSI)的超高频(ultra high frequency, UHF)RFID定位技术受到众多学者关注,已提出包括SpotON、LANDMARC、VIRE等多种定位算法[21-23]。在此基础上,Huang等提出了基于RSSI的三角定位方法[24];Zhao等基于聚类策略提出了相似RSSI定位方法[25]。现阶段,超高频RFID定位技术已被应用在车间巡检[26]、仓储管理[27]、人员监护[28]等众多领域。但是,现有RFID定位技术多应用于室内环境,作者团队在前期工作中探索利用高频(13.56 MHz)RFID设备对果园运输机进行定点定位研究[29],而超高频 RFID定位在果园环境中的应用情况有待于进一步试验。
本研究针对电驱动式单轨运输机的定位需求,研究基于超高频RFID的运输机在轨位置感知方法;通过分析RFID阅读器与天线之间的通信特征,构建基于RSSI的定位模型;通过设计定位试验及对RSSI数据处理分析,得到超高频RFID最优定位参数。本研究提出的定位方法能够为提高运输机运行安全性,多运输机机协同作业和规划调度等应用提供精准数据支持。
1 系统架构及RFID定位模型
1.1 系统架构
本研究的试验设备由深圳市远望谷信息技术股份有限公司生产,包括XC-RF807型超高频 RFID固定式阅读器及分离式单向天线,XCTF-8405型超高频 RFID无源抗金属标签。阅读器工作频率为902~928 MHz,发射功率可调范围为15~36 dbm,可读取到标签返回的RSSI数据。基于超高频 RFID的单轨运输机定位系统主要由安装于运输机内部的RFID阅读器、运输机前后两端的RFID天线和放置于轨道侧边的RFID标签组成,如图1所示。
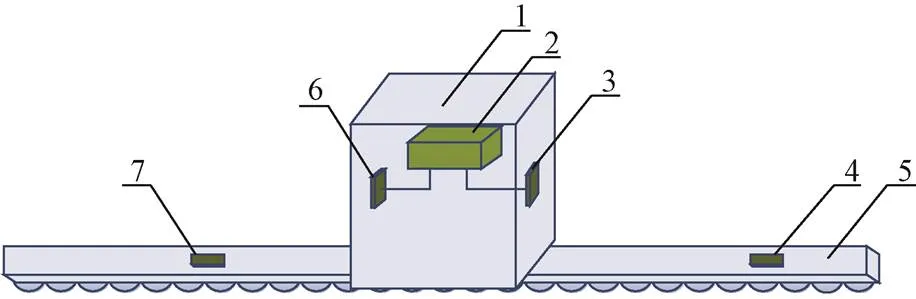
1.运 输机机箱 2.超高频 RFID阅读器 3.天线b 4.标签b 5.单轨轨道 6.天线a 7.标签a
理想状态下,通过阅读器读取的RSSI数据可表征RFID天线接收无源标签反射的信号功率大小,从而能够映射天线与对应标签之间的相对距离[30-31]。但是,由于RFID信号在传播过程中受多径效应、阴影效应等影响[32-33],并且果园作业环境复杂多变,枝叶遮挡、农机农具等会对测量数据造成不同程度影响。因此,在果园环境采集的RSSI数据波动较大,存在较严重的背景噪声干扰,只能对运输机进行轨道区域感知,无法实现精准定位。本研究针对果园作业环境,设计了RFID双天线双标签对照的定位方法,旨在通过对照2对天线-标签的RSSI数据来降低实时的噪声干扰影响,从而降低运输机定位误差,提高定位精度。
本研究的试验场地位于华南农业大学工程学院国家柑橘产业技术体系的柑橘试验园,为方便采集和分析试验数据,对定位系统进行了简化处理,如图2a所示,图2b为现场试验图。本研究将通过试验数据处理,分析基于双天线双标签的超高频 RFID最优安装参数,即图2a中双标签之间的水平在轨距离1和天线与轨道标签之间的垂直距离2。另外,本研究在试验过程中发现,2个单向天线背向叠放将造成严重信号干扰,因此设置双天线错位叠放,且保持固定间隔。
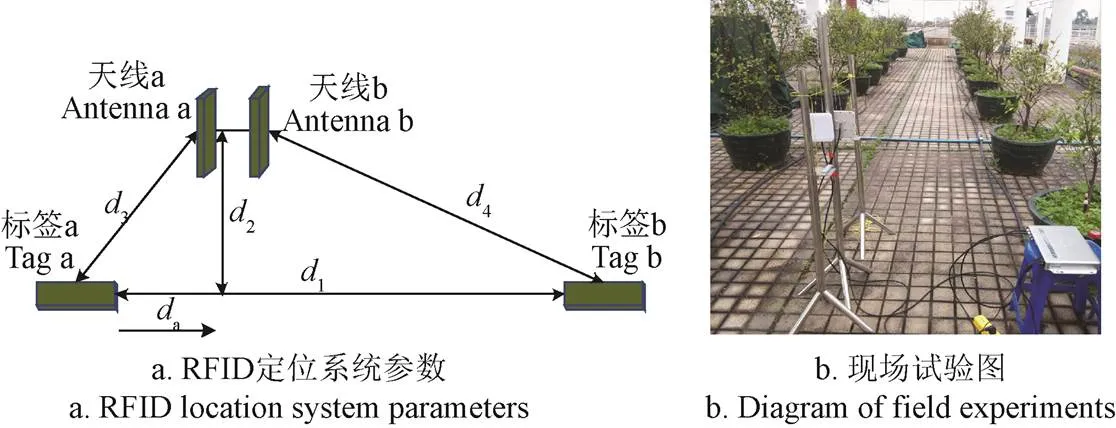
注: d1为双标签的水平距离,d2为天线与标签的垂直距离,d3为天线a与标签a的通信距离,d4为天线b与标签b的通信距离,da为天线a与标签a的水平距离。
1.2 能量传输定位模型
超高频 RFID无源标签没有电源,不能主动向阅读器发送数据。阅读器与无源标签之间的通信遵从电磁耦合原理,阅读器通过天线发射电磁波信号来激活标签,并接收标签反射的电磁波信号[34-35]。
设阅读器的发射功率为P,其发射天线的增益为G,则标签与阅读器天线距离为时反射的电磁波能量P为
式中为标签反射电磁波能力的度量,取值取决于标签物理特性。
则阅读器天线所处位置的功率密度S为
设阅读器接收天线增益为G,信号波长为,则接收天线有效面积A为

则阅读器天线接收到标签反射总功率P为
若分别使用图2a中天线a测量标签a得到的信号强度值RSSIa和天线b测量标签b得到的信号强度值RSSIb来表征天线收到对应标签的反射功率P[24-25],则

由式(5)可知,对于天线a和天线b,二者RSSI数据比值与对应标签通信距离比值的4次方呈负相关。因为测量过程中天线与标签工作环境的一致性和实时性,在理想状态下使用式(5)可有效降低背景噪声干扰。但由于现场RFID信号传播受多方面因素影响,因此本研究使用4次多项式来表征二者关系,即
其中,为多项式系数,=4,变量x=4/3。
1.3 路径损耗定位模型
基于通信距离的路径损耗模型在多个领域被用来模拟由多径衰落、障碍物和移动物体等复杂环境因素引起的RFID无线信号传播的路径损耗[24,36],如式(7)所示。
式中0表示模型参考距离,PL(0)为发射信号在自由空间中传播距离为0时的路径损耗。为路径损耗指数,取值依赖于系统环境,一般设为[1.6,6]。X为阴影衰落,在此模型中表示均值为0,标准偏差为的高斯噪声。
设阅读器的发射功率为P,则与天线距离为的标签反射功率P为
式中为标签功率反射能力的度量,取值取决于标签物理特性。则经过距离后,阅读器天线收到的标签反射功率P为

若分别使用图2a中天线a测量标签a得到的信号强度值RSSIa和天线b测量标签b得到的信号强度值RSSIb来表征天线收到对应标签的反射功率P[24-25],则
由式(10)可知,对于天线和天线,二者RSSI数据差值与对应标签通信距离比值的对数呈负相关。与能量传输定位模型相似,式(10)在理想状态下可有效降低背景噪声干扰。本研究使用式(11)来表征二者关系
(x)=RSSIa−RSSIb=βx+(11)
式中为函数系数,为补偿项,变量x=lg(4/3)。
2 试验设计与结果分析
2.1 试验设计
本研究将通过单天线试验确定RFID设备安装参数(1,2),通过双天线定位试验确定定位模型系数,通过定位模型性能试验验证基于当前应用环境的超高频RFID最优定位参数的有效性,试验设计如图3所示。单天线试验参数如图4所示,双天线试验参数如图2a所示。本研究使用的电驱动式单轨运输机由作者团队自行研制,运行速度为0.2~0.6 m/s[29],前期研究结果表明RFID设备在运输机正常运行状态下能够100%读取到标签信息。为提高数据质量,减小测量误差,本研究的试验数据均在静止状态下采集。

图3 试验设计图
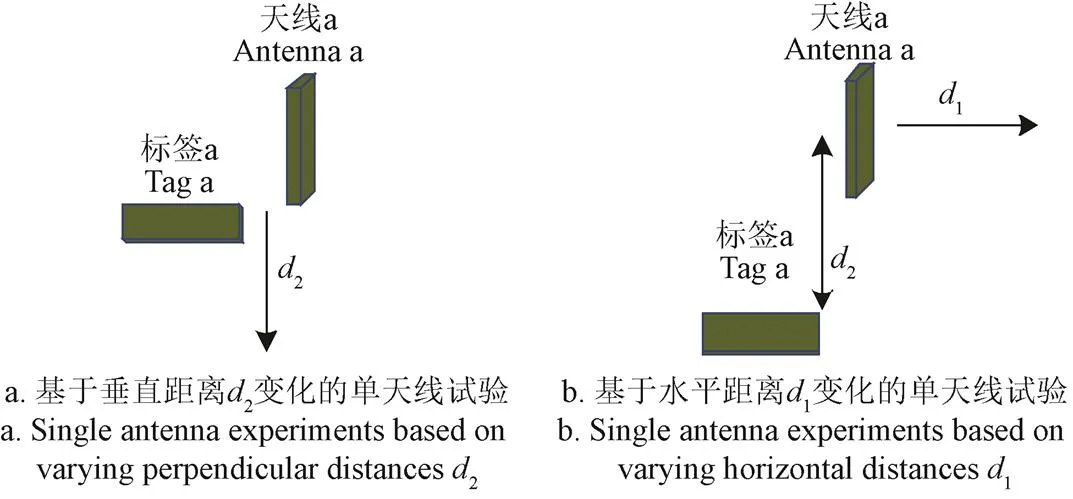
图4 单天线试验参数设计
2.2 基于垂直距离d2变化的单天线试验
如图4a所示,设置阅读器天线a发射功率为33 dbm,设定标签a与天线a的中心水平距离为5 cm,研究在不同读取时间、不同垂直距离2变化下,天线a读取RSSIa的数据变化趋势,试验数据如表1所示。
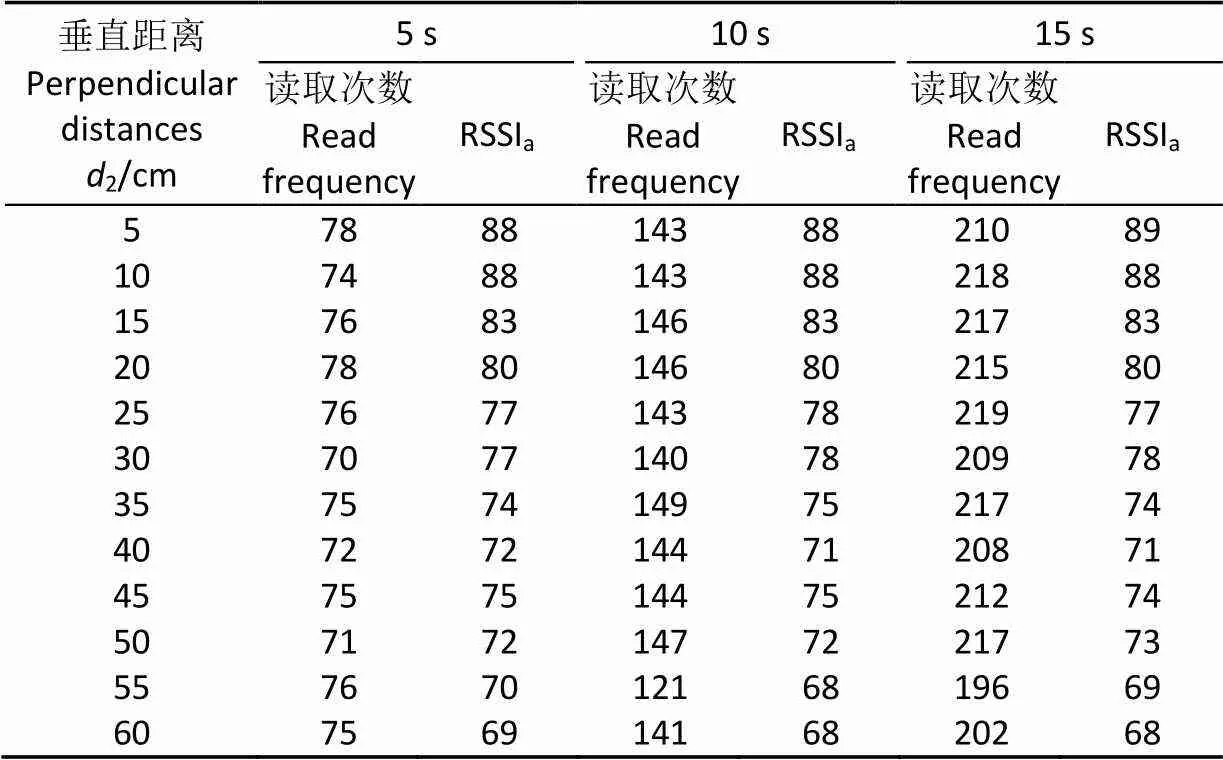
表1 基于垂直距离d2变化的单天线试验
注 :天线a测量标签a得到的信号强度值为RSSIa
Note: RSSIais the radio signal strength indicator of tag a measured by antenna a.
由表1中数据可知,分别使用天线a对标签a进行5、10和15 s读取数据,标签a的被读取次数与被读取时间正相关,这表明XC-RF807型超高频 RFID阅读器工作性能较稳定。为不失一般性,后续试验的数据读取时间均以10 s为准。另外,表1数据表明,当垂直距离2为5和10 cm时,RSSIa均为88,不能映射出垂直距离2的变化;并且本研究使用了边长为13 cm的正方形单向天线,当垂直距离2为5或10 cm时,天线距离轨道过近,存在被轨道旁或地面障碍物碰撞损坏的风险。当垂直距离2为15~25 cm时,RSSIa信号强度值较大,且随距离增加,下降趋势稳定。同时,考虑在实际应用环境中运输机机箱距轨最大高度为38 cm,本研究设定垂直距离2的可选数值包括15、20、25 cm。
2.3 基于水平距离d1变化的单天线试验
如图4b所示,设置阅读器天线a发射功率为36 dbm,设定标签a与天线a的中心垂直距离2为15 cm,研究在不同水平距离1变化下,天线a位于标签a最远端时读取RSSIa数据变化趋势。为提高数据准确性,分别进行3次独立试验,数据如表2所示。
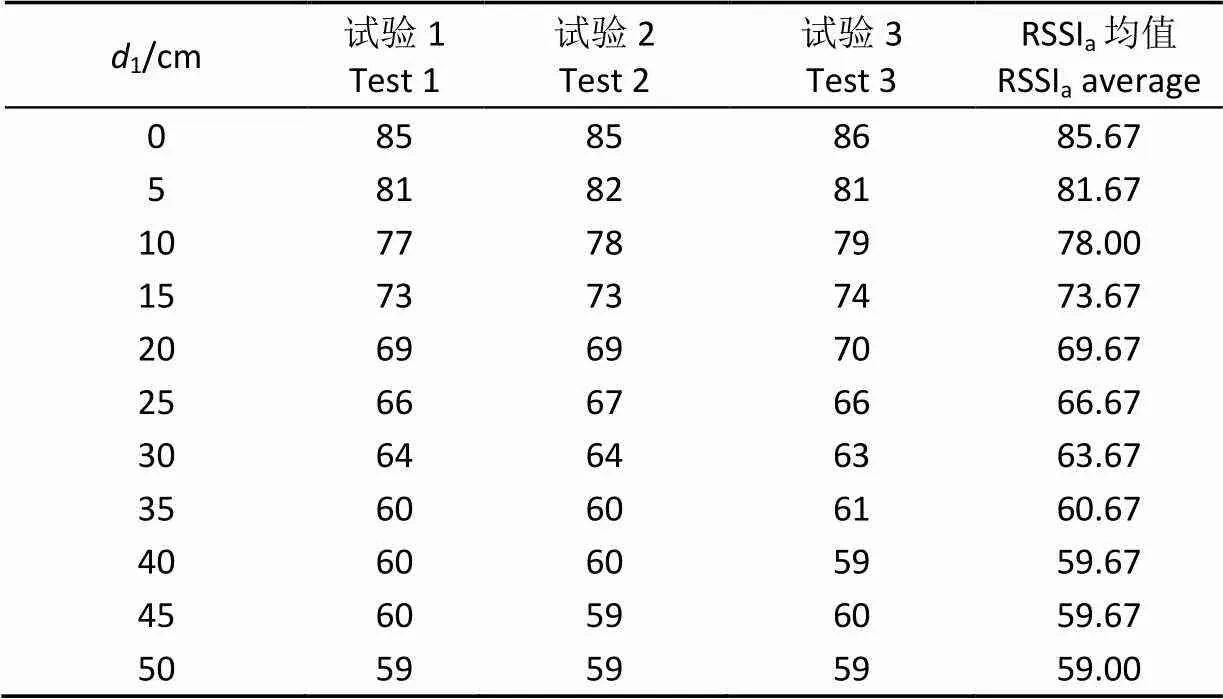
表2 基于双标签的水平距离d1变化的单天线试验
由表2中数据可知,随着水平距离1的变化,RSSIa数据与水平距离1负相关。但是,当水平距离1达到40~50 cm时,RSSIa数据相对保持稳定。试验数据表明在当前试验条件下,本研究使用的RFID设备能够通过RSSIa数据变动来表征的最大水平通信距离不超过50 cm。当设定标签a与天线a的中心垂直距离2分别为20和25 cm时,测量结果存在类似趋势。因此本研究试验中,设定水平距离1的可选数值包括40、45、50 cm。
2.4 双天线定位试验
本研究提出能量传输定位模型和路径损耗定位模型,主要目的是通过双天线双标签来降低实时噪声干扰,进一步明确阅读器天线与标签的通信距离与其所读取RSSI数据之间的映射关系,从而实现运输机的在轨位置感知。通过上述试验数据分析,本研究得到了适用于单轨运输机定位系统的RFID设备安装参数(1,2)。本节将针对不同安装参数进行双天线试验。设置阅读器天线a和天线b发射功率均为36 dbm,天线a和天线b从标签a处开始水平移动,记天线a与标签a的水平距离为a,如图2a所示。试验数据及基于不同定位模型的RSSI比值(x)和差值(x)如表3所示。
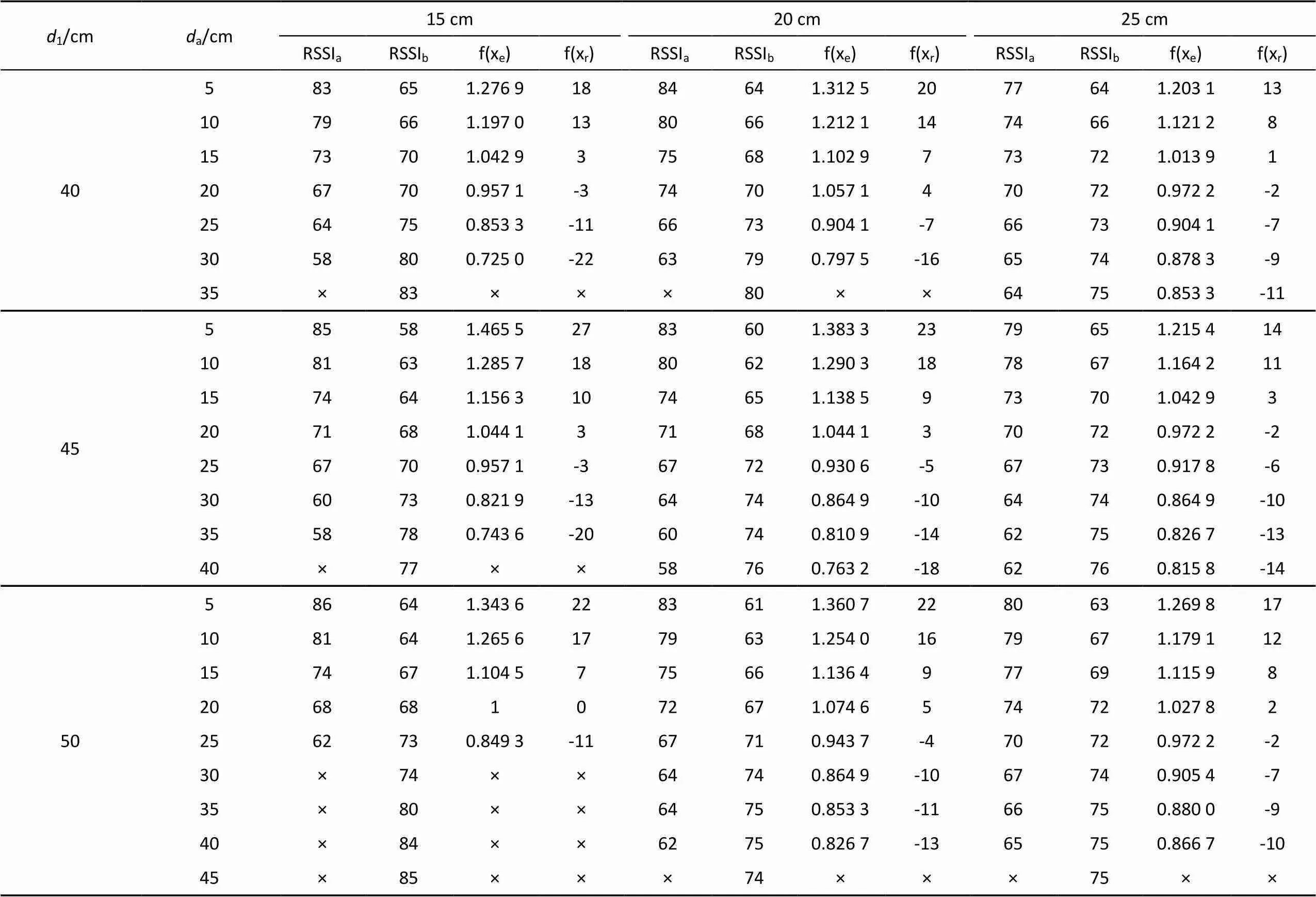
表3 不同垂直距离的双天线试验
注: 天线b测量标签b得到的信号强度值RSSIb。x=4/3,(x)为能量传输定位模型的RSSI比值(RSSIa/RSSIb)。x= lg(4/3),(x)为路径损耗定位模型的RSSI差值(RSSIa-RSSIb)。‘×’表示阅读器天线在试验时间(10 s)内无法读取对应标签RSSI数据。
Note: RSSIbis the radio signal strength indicator of tag b measured by antenna b.x=4/3,(x) is the RSSI ratio in energy transferring location model (RSSIa/RSSIb).x= lg(4/3),(x) is difference of RSSI in path loss location model (RSSIa-RSSIb). ‘×’ means reader antenna can’t obtain the RSSI data of communication tag within 10 s.
表3中符号‘×’表示阅读器天线在试验时间(10 s)内无法读取对应标签RSSI数据,这主要是因为双天线在与标签通信过程中存在信号干扰。综合考虑RFID系统通信质量和数据可靠性,本研究在表3中选取3组具有不同水平距离1,读取数据量较多,且信号强度值较大的RSSI数据,并依此来分别拟合能量传输定位模型和路径损耗定位模型,如式(6)和式(11)所示。
本研究选取的(1,2)参数为:(40 cm, 25 cm)、(45 cm, 20 cm)、(50 cm, 20 cm)。记天线a和天线b之间的固定间隔为d,本研究试验环境中,d=4 cm。通过图2a可得能量传输定位模型参数x和路径损耗定位模型参数x,如式(12)~(13)所示,使用最小二乘法进行模型系数拟合,如表4所示。
x=lgx(13)
3 定位模型性能试验与结果分析
3.1 定位模型性能试验
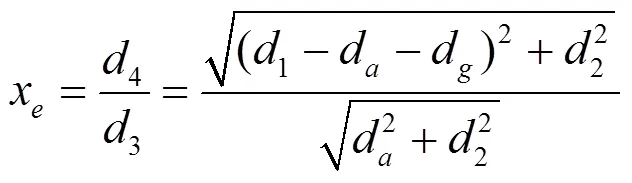
为测试表4中能量传输定位模型和路径损耗定位模型的有效性,本研究基于3组(1,2)参数进行了性能试验,试验数据如表5所示。针对能量传输定位模型,通过测量数据计算得到(x);利用定位模型计算得到变量x,根据式(12)计算得到定位变量,记为ae。针对路径损耗定位模型,通过测量数据计算得到(x);利用定位模型计算得到变量x,根据式(12)~(13)计算得到定位变量,记为ar。
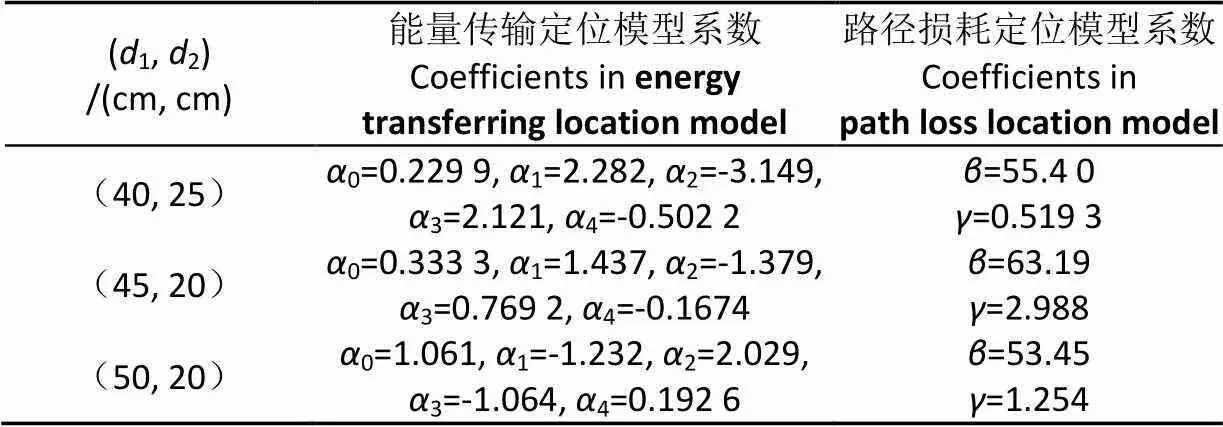
表4 定位模型拟合系数
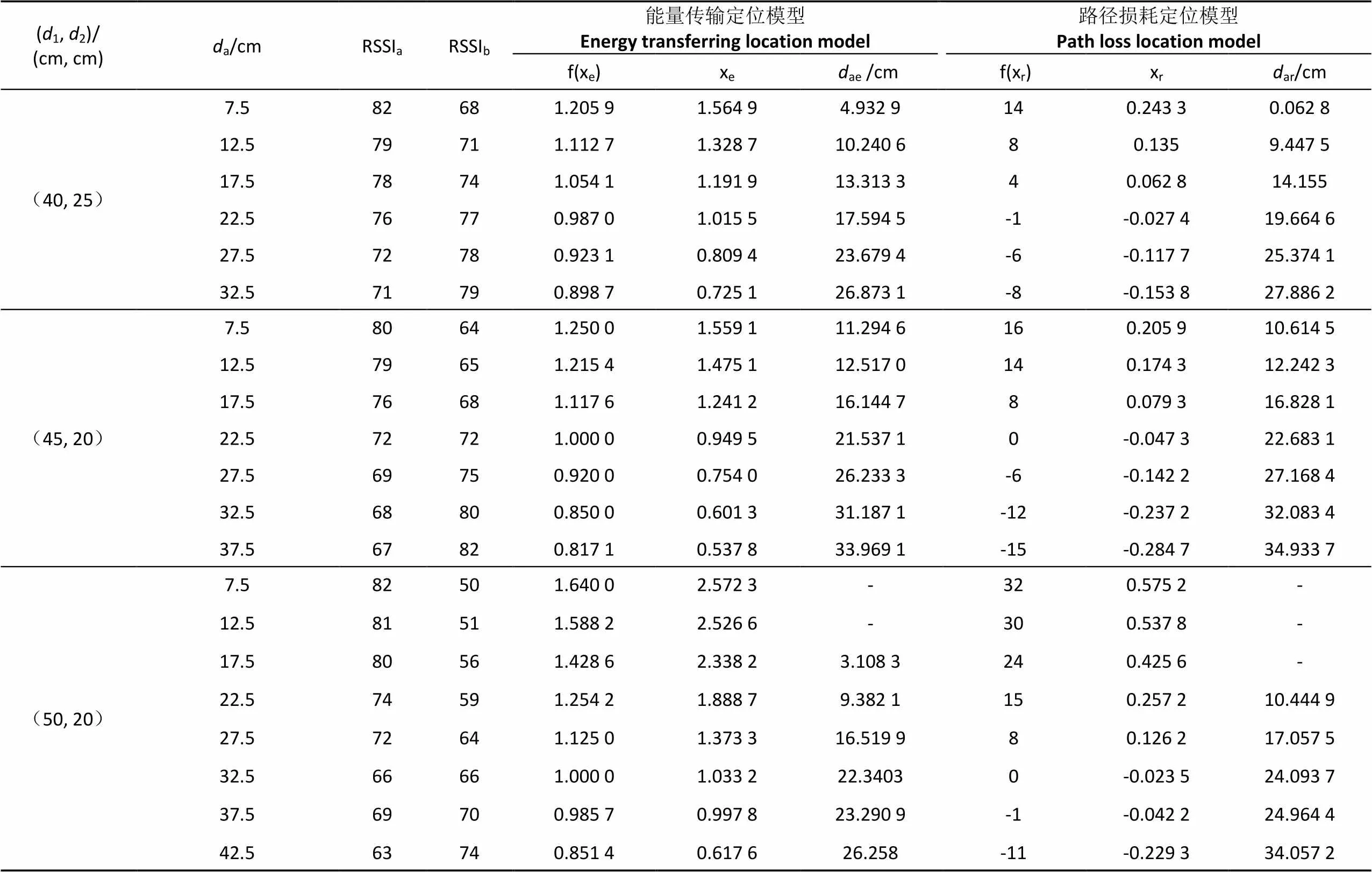
表5 定位模型性能试验
注:ae为使用能量传输定位模型计算的定位结果,ar为使用路径损耗定位模型计算的定位结果。‘-’表示(50 cm,20 cm)参数的部分定位变量计算结果不在合理取值范围内。
Note:aeis the location result using energy transferring location model,aris the location result using path loss location model. ‘-’ means some calculated location results are out of available range.
3.2 结果分析
由于定位模型的定位变量(ae、ar)与模型函数值((x)、(x))之间均为非线性映射关系,同一模型函数值可能存在多个与之对应的定位变量。根据试验数据可知,ae∈[0,1],ar∈[0,1]。表5中符号‘-’表示(50 cm,20 cm)参数的部分定位变量计算结果不在合理取值范围内,这表明基于该参数的定位模型不适用于本研究的试验环境。针对(40 cm,25 cm)参数和(45 cm,20 cm)参数的定位结果分析如表6所示。当安装参数设为(40 cm,25 cm)时,能量传输定位模型的定位误差均值稍优于路径损耗定位模型,但路径损耗定位模型的定位误差最小值优于能量传输定位模型;当安装参数设为(45 cm,20 cm)时,路径损耗定位模型的定位误差均值优于能量传输定位模型,但能量传输定位模型可得到定位误差最小值;能量传输定位模型和路径损耗定位模型在(45 cm,20 cm)参数条件下,均可得到更好的定位结果,定位误差均值分别为1.748 6和1.077 4 cm,2种定位模型曲线与实测数据如图5所示。
在果园作业环境中,影响RFID系统定位精度的因素复杂多变。本研究认为,产生定位误差的原因主要包括系统误差、测量误差和干扰误差。首先,由于本研究使用的RFID设备输出RSSI数据精度受限,系统误差难以避免;其次,移动标签和天线的测量过程中会引入人为测量误差。但是,本研究提出的双天线双标签对照的定位方法能够有效降低系统误差和测量误差。因此,在没有干扰误差存在的理想试验环境中,由系统误差和测量误差导致的定位误差主要受标签和天线的测量移动间距(5 cm)影响。结合表6中不同参数条件下定位误差最大值可知,能量传输定位模型和路径损耗定位模型在(45 cm,20 cm)参数条件下能够更好地消除信号干扰导致的定位误差。另外,本研究试验结果表明,与1=40 cm相比,1=45 cm时2种定位模型均可得到更好的定位精度,这表明通过减小标签之间的在轨距离,即增大标签部署密度,并不能保证提高定位精度。

表6 定位结果分析I
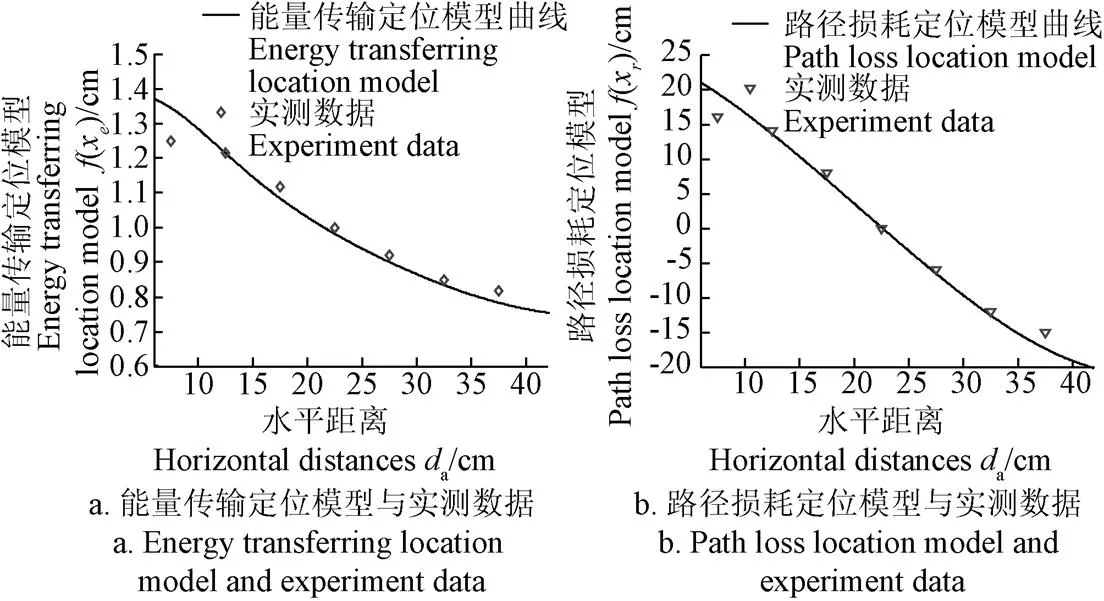
图5 定位模型与实测数据
综上所述,在本研究试验环境中,基于(45 cm,20 cm)参数的路径损耗定位模型定位精度最佳。为不失一般性,若记单轨运输机机箱长度为d,则当前RFID定位系统的最优参数包括:安装参数(1+d-d,2),即(d+41 cm,20 cm);模型系数=63.19,=2.988。
3.3 果园试验及结果分析
为进一步验证定位方法的有效性,本研究在南亚热带果树种质资源圃(广州)进行了现场试验(植株间距约4 m,果树高度约5 m),现场试验如图6所示。能量传输定位模型和路径损耗定位模型基于不同安装参数的计算结果如表7所示。通过数据分析可知,现场试验的定位结果与定位模型性能试验的定位结果具有一致性,即当安装参数设为(45 cm,20 cm)时,能量传输定位模型和路径损耗定位模型具有更好的定位结果;定位模型的定位误差均值相对稳定,使用路径损耗定位模型得到的定位误差均值为1.007 0 cm。因此,现场试验结果表明本研究提出的RFID双天线双标签对照定位方法能够有效降低环境噪声干扰,减小运输机定位误差。

图6 现场试验
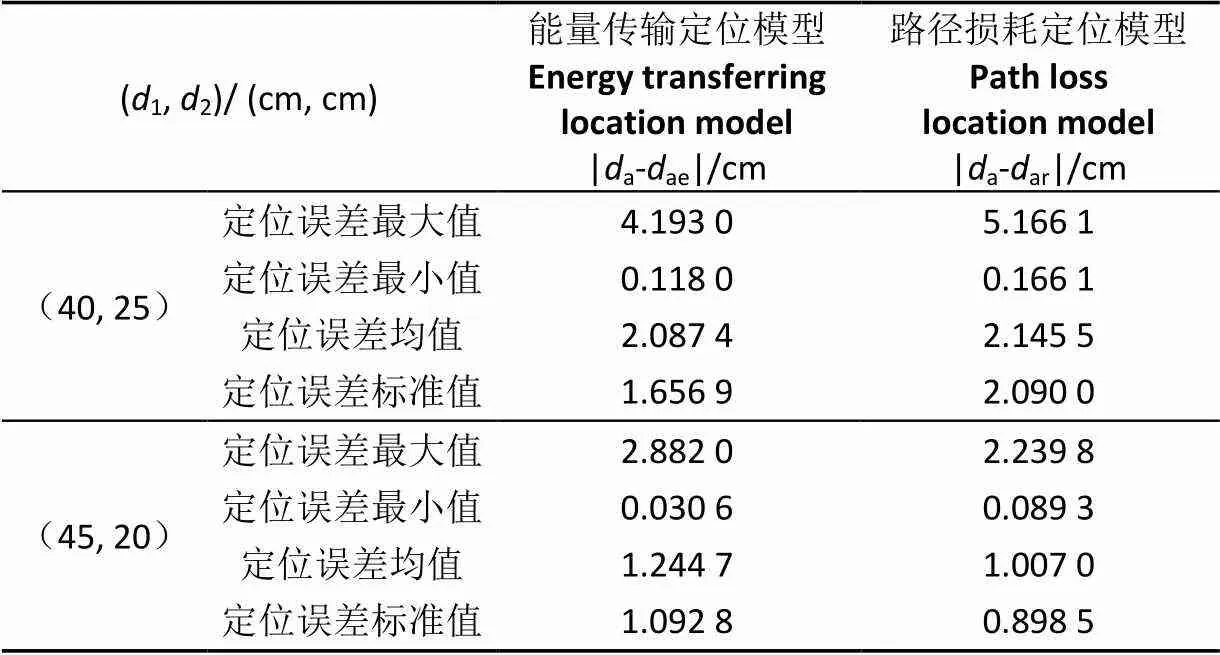
表7 定位结果分析II
4 结论与讨论
本研究基于超高频RFID RSSI数据对电驱动式单轨运输机进行在轨位置感知试验,设计了双天线双标签对照的定位方法来降低现场噪声干扰,构建了能量传输定位模型和路径损耗定位模型。通过RFID单天线/双天线试验确定了适用于试验环境的RFID定位系统的最优参数,并通过定位模型性能试验和现场试验均验证了定位方法的有效性。试验结果表明:
1)双天线双标签对照的定位方法能够有效降低噪声干扰,从而减少系统定位误差,但不能完全消除噪声干扰;减小轨道标签之间的部署距离,即增大标签部署密度,不能保证提高系统定位精度。
2)适用于当前RFID设备的最优安装参数为(45 cm,20 cm),使用不同型号的单轨运输机时应考虑机箱的不同长度将导致安装参数发生变化。
3)在不同试验环境中,基于(45 cm,20 cm)参数的路径损耗模型具有最小平均定位误差。
本研究的试验数据验证了基于超高频 RFID的单轨运输机定位方法的可行性。下一步工作将研究果园动态环境及运输机运行参数等因素对定位精度的影响。
[1] 李震,洪添胜,孙同彪,等. 山地果园蓄电池驱动单轨运输机的设计[J]. 西北农林科技大学学报:自然科学版,2016,44(6):221-227,234.
Li Zhen, Hong Tiansheng, Sun Tongbiao, et al. Design of battery powered monorail transporter for mountainous orchard[J]. Journal of Northwest A&F University: Natural Science Edition, 2016, 44(6): 221-227, 234. (in Chinese with English abstract)
[2] 杨洲,洪添胜. 山地果园运送装备[M]. 北京:中国农业出版社,2016.
[3] 张俊峰,李敬亚,张衍林,等. 山地果园遥控单轨运输机设计[J]. 农业机械学报,2012,43(2):90-95.
Zhang Junfeng, Li Jingya, Zhang Yanlin, et al. Design of remote control monorail transporter for mountainous orchard[J]. Transactions of the Chinese Society of Agricultural Machinery, 2012, 43(2): 90-95. (in Chinese with English abstract)
[4] 贾闯,李加念,洪添胜,等. 山地果园单轨运输机超声波避障系统的设计与试验[J]. 农业工程学报,2015,31(增刊2):69-74.
Jia Chuang, Li Jianian, Hong Tiansheng, et al. Design and test of ultrasonic obstacle avoidance system for mountain orchard monorail conveyor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp.2): 69-74. (in Chinese with English abstract)
[5] 刘滨凡,王立海. 单轨车的发展及在我国林业中的应用[J]. 森林工程,2008,24(1):25-27.
Liu Binfan, Wang Lihai. Development of monorail and its application in forestry in China[J]. Forest Engineering, 2008, 24(1): 25-27. (in Chinese with English abstract)
[6] Yamamoto S, Kanamitsu M, Ajiki K, et al. S-shaped multipurpose monorail for hillside orchards[J]. Japan Agricultural Research Quarterly Jarq, 2013, 41: 147-152.
[7] 刘滨凡. 森林生态型单轨运输设备安全稳定研究[D]. 哈尔滨:东北林业大学,2009.
Liu Binfan. The Safe and Stable Research of Forest Ecotype's Transporting of Monorail Vehicle[D]. Harbin: Northeast Forestry University, 2009. (in Chinese with English abstract)
[8] 汤晓磊. 7YGD-45型单轨果园运输机的设计[D]. 武汉:华中农业大学,2012.
Tang Xiaolei. Design of 7YGD-45 Type Single-Track Orchard Transport[D]. Wuhan: Huazhong Agricultural University, 2012. (in Chinese with English abstract)
[9] 张俊峰,李敬亚,张衍林,等. 山地果园遥控单轨运输机设计[J]. 农业机械学报,2012,43(2):90-95. Zhang Junfeng, Li Jingya, Zhang Yanlin, et al. Design of remote control monorail transporter for mountainous orchard[J]. Transactions of the Chinese Society of Agricultural Machinery, 2012, 43(2): 90-95. (in Chinese with English abstract)
[10] 胡静涛,高雷,白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报,2015,31(10):1-10. Hu Jingtao, Gao Lei, Bai Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(10): 1-10. (in Chinese with English abstract)
[11] 刁智华,王会丹,宋寅卯. 基于机器视觉的农田机械导航线提取算法研究[J]. 农机化研究,2015,37(2):35-39.
Diao Zhihua, Wang Huidan, Song Yinmao. Research of farm machinery navigation algorithm based on machine vision[J]. Journal of Agricultural Mechanization Research, 2015, 37(2): 35-39. (in Chinese with English abstract)
[12] 孙元义,张绍磊,李伟. 棉田喷药农业机器人的导航路径识别[J]. 清华大学学报:自然科学版,2007,47(2):206-209.
Sun Yuanyi, Zhang Shaolei, Li Wei. Guidance lane detection for pesticide spraying robot in cotton field[J]. Journal of Tsinghua University: Sci & Tech, 2007, 47(2): 206-209. (in Chinese with English abstract)
[13] Ball D, Upcroft B, Wyeth G, et al. Vision-based obstacle detection and navigation for an agricultural robot[J]. Journal of Field Robotics, 2016, 33(8): 1107-1130.
[14] 何洁,孟庆宽,张漫,等. 基于边缘检测与扫描滤波的农机导航基准线提取方法[J]. 农业机械学报,2014,45(11):265-270.
He Jie, Meng Qingkuan, Zhang Man, et al. Crop baseline extraction method for off-road vehicle based on boundary detection and scan-filter[J]. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45(11): 265-270. (in Chinese with English abstract)
[15] Robati J, Navid H, Rezaei M, et al. Automatic guidance of an agricultural tractor along with the side shift control of the attached row crop cultivator[J]. Journal of Agricultural Science and Technology, 2012, 2(1): 151-158.
[16] Ortiz B V, Balkcom K B, Duzy L, et al. Evaluation of agronomic and economic benefits of using RTK-GPS-based auto-steer guidance systems for peanut digging operations[J]. Precision Agriculture, 2013, 14(4): 357-375.
[17] 罗锡文,张智刚,赵祚喜,等. 东方红 X-804 拖拉机的 DGPS 自动导航控制系统[J]. 农业工程学报,2009,25(11):139-145.
Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25 (11): 139-145. (in Chinese with English abstract)
[18] 陈琴刚,马本学,李锋霞,等. 基于RFID农畜产品质量安全溯源系统研究进展[J]. 农机化研究,2013,35(8):224-227.
Chen Qingang, Ma Benxue, Li Fengxia, et al. Based on RFID animal product quality and safety of the traceability system research progress[J]. Journal of Agricultural Mechanization Research, 2013, 35(8): 224-227. (in Chinese with English abstract)
[19] 王玲玲,黄家健,翁绍捷,等. 基于RFID的热带特色农业田间信息采集系统[J]. 农业工程学报,2010,26(增刊2):98-102.
Wang Lingling, Huang Jiajian, Weng Shaojie, et al. Field information collection system for characteristic and tropical farming based on RFID[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(Supp.2): 98-102. (in Chinese with English abstract)
[20] 李永钧. 基于RFID的智慧园林信息集成管理系统研究[J]. 黑龙江农业科学,2016(6):133-136.
Li Yongjun. Research on information integration management system of intelligent garden based on RFID[J]. Heilongjiang Agricultural Sciences, 2016(6): 133-136. (in Chinese with English abstract)
[21] Hightower J, Wantand R, Borriello G. SpotON: An Indoor 3D Location Sensing Technology Based on RF Signal Strength[R]. Technical Report UW-CSE, University of Washington, Department of Computer Science and Engineering, Seattle WA, 2000.
[22] Ni L M, Liu Y, Lau Y C, et al. LANDMARC: Indoor location sensing using active RFID[J]. Wireless Networks, 2004, 10(6): 701-710.
[23] Zhao Y, Liu Y, Ni L M. VIRE: Active RFID-based localization using virtual reference elimination[C]// International Conference on Parallel Processing. Xi'an: IEEE, 2007: 56-63.
[24] Huang Y, Lü S, He Y, et al. An isosceles triangular placement of reference tags for RFID indoor location system[J]. Chinese Journal of Electronics, 2011, 20(3): 504-510.
[25] Zhao Y, Liu K, Ma Y, et al. Similarity analysis-based indoor localization algorithm with backscatter information of passive UHF RFID tags[J]. IEEE Sensors Journal, 2017, 17(1): 185-193.
[26] 郭国法,卢运栓,张开生. 适用于车间巡检定位的改进 RFID定位算法[J]. 实验室研究与探索,2016,35(12):29-33.
Guo Guofa, Lu Yunshuan, Zhang Kaisheng. An improved RFID location algorithm applied to the location of workshop inspection[J]. Research & Exploration in Laboratory, 2016, 35(12): 29-33. (in Chinese with English abstract)
[27] Zhang D, Yang L T, Chen M, et al. Real-time locating systems using active RFID for internet of things[J]. IEEE Systems Journal, 2016, 10(3): 1226-1235.
[28] Ruan W. Unobtrusive human localization and activity recognition for supporting independent living of the elderly[C]//IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops). Sydney: IEEE, 2016: 1-3.
[29] 李震,刘岳,洪添胜,等. 山地果园蓄电池驱动单轨运输机的在轨位置感知系统[J]. 河南农业大学学报,2017,51(1):53-59.
Li Zhen, Liu Yue, Hong Tiansheng, et al. On-track positioning system for battery-drive mountainous orchard monorail transporter[J]. Journal of Henan Agricultural University, 2017, 51(1): 53-59. (in Chinese with English abstract)
[30] Truijens M, Wang X, de Graaf H, et al. Evaluating the performance of absolute rssi positioning algorithm-based microzoning and rfid in construction materials tracking[J]. Mathematical Problems in Engineering, 2014, 2014(1): 1-8.
[31] Çaliş G, Becerik-Gerber B, Göktepe A B. Analysis of the variability of RSSI values for active RFID-based indoor applications[J]. Turkish Journal of Engineering & Environmental Sciences , 2013, 37: 186-210.
[32] Rappaport T S. Wireless Communications: Principles and Practice[M]. Upper Saddle River: IEEE press, 1996.
[33] Sanpechuda T, Kovavisaruch L. A review of RFID localization: Applications and techniques[C]// 5th International Conference on Electrical Engineering/ Electronics, Computer, Telecommunications and Information Technology. Krabi: IEEE, 2008, 2: 769-772.
[34] Fan Z, Qiao S, Huang-Fu J T, et al. Signal descriptions and formulations for long range UHF RFID readers[J]. Progress In Electromagnetics Research, 2007, 71: 109-127.
[35] Friedewald O, Papenbroock J, Herzog M A. Analysis of the radio propagation model at RFID applications[C]// 2013 European Conference on Smart Objects, Systems and Technologies (SmartSysTech). Nuremberg: VDE, 2013: 1-4.
[36] Chandrasekaran V, Narayan K, Vasani R K, et al. InPLaCE RFID: Indoor path loss translation for object localization in cluttered environments[C]// 2015 IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP). Singapore: IEEE, 2015: 1-6.
Orchard monorail conveyer location based on ultra high frequency RFID dual antennas and dual tags
Lü Shilei1,2, Liang Yincong3, Li Zhen1,2,4※, Wang Jianhua1, Wang Weixing1,2
(1.,,510642,; 2.510642,; 3.,,510642,; 4.,510642,)
As the main transportation equipment in mountainous orchards, monorail conveyers have strong climbing capacity and high reliability. However, monorail conveyers in working status can be invisible frequently because of tree shades. It is impossible for operators to monitor a working monorail conveyer with a remote control in real time. Thus the monorail conveyer should have the capacity of arriving at the designated locations autonomously. The key technology is to locate the conveyer on the monorail accurately. In recent years, there has been growing attention on the technology of ultra high frequency RIFD (radio frequency identification) location, which is based on RSSI (received signal strength indicator) data. The ultra high frequency RIFD location has been applied in many fields including workshop inspection, warehouse management and staff supervision. However, these applications are carried out in indoor environment. There is little research on locating agricultural implements using ultra high frequency RIFD. Considering the application requirement of locating the conveyer on the monorail accurately, experiments of the monorail conveyer location awareness have been carried out in this paper, which is based on the RFID RSSI data. The RFID equipment used in this paper include an XC-RF807 UHF RFID reader with 2 separated unidirectional antennae and several XCTF-8405 anti-metal passive tags, which are provided by Invengo Technology Pte. Ltd, Shenzhen, China. The operating frequency of reader is 902-928 MHz and the transmitted power can be varied from 15 to 36 dbm. Firstly, RFID communicative features are analyzed. The approach of conveyer location is proposed by comparing the RSSI data between dual antennae and dual tags, which aims to reduce the noise interference in conveyer location. Then the energy transferring location model and path loss location model are formulated. Secondly, several experiments are carried out in the citrus orchard, which is located in the China Agriculture Research System, Guangzhou, China. The 2 significant setting parameters of RFID equipment,i.e. the optimal perpendicular distances between RFID antenna and the tag on the monorail, and the optimal horizontal distances between tags on the monorail, are obtained in the experiments of RFID single antenna. Parameters of the 2 location models are fitted to be applicable to experiment environment through the analysis of RSSI data, which can be obtained in the experiments of RFID dual antennae. Finally, the results of performance experiments on location models show that the approach of conveyer location, which is implemented by comparing the data of dual antennae and dual tags, can reduce the noise interference effectively. It can reduce the location error and improve the location system accuracy, but the interference cannot be eliminated completely. The experiment results also demonstrate that reducing the distance between dual tags on the monorail, which increases the density of deployed tags, is not a good way to improve the location system accuracy. The optimal horizontal distances between tags, and the optimal perpendicular distances between RFID antenna and the tag on the monorail are 45 and 20 cm, respectively, and the optimal coefficients in path loss location model are 63.19 and 2.988, respectively, which are applicable to the experiment environment. The varying lengths of conveyers should be considered when different types of conveyers are used. Under the optimal conditions, the minimal average location error is 1.077 4 cm by using the path loss location model, and the minimal location error is 0.017 0 cm by using the energy transferring location model. In order to further verify the effectiveness of the proposed approach, another experiment is carried out in Germplasm Resource Garden of Southern Subtropical Fruit Trees, Guangzhou, China. It shows the similar location results. The research in this paper verifies the feasibility of locating the conveyer on the monorail accurately by using ultra high frequency RIFD equipment. The proposed location approach can improve the safety and reliability of working monorail conveyers.
agricultural machinery; transportation; orchards;; RFID; RSSI; location
2017-09-29
2018-01-11
国家自然科学基金项目(61601189、61602187);现代农业产业技术体系建设专项资金(CARS-26);广东省科技计划项目(2016A020210088)
吕石磊,博士,讲师,主要从事农业信息化研究。Email:lvshilei@scau.edu.cn
李 震,博士,教授,博士生导师,主要从事机电一体化技术应用研究。Email:lizhen@scau.edu.cn
10.11975/j.issn.1002-6819.2018.04.009
TP274; S126
A
1002-6819(2018)-04-0071-09
吕石磊,梁尹聪,李 震,王建华,王卫星.基于超高频RFID双天线双标签对照的果园单轨运输机定位[J]. 农业工程学报,2018,34(4):71-79.doi:10.11975/j.issn.1002-6819.2018.04.009 http://www.tcsae.org
Lü Shilei, Liang Yincong, Li Zhen, Wang Jianhua, Wang Weixing. Orchard monorail conveyer location based on ultra high frequency RFID dual antennas and dual tags[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 71-79. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.04.009 http://www.tcsae.org
