机器人欠驱动手爪驱动控制器设计
2018-01-23李开霞赵江海花加丽
李开霞,赵江海,丁 玲,花加丽
(1.中国科学院合肥物质科学研究院先进制造技术研究所,常州 213164;2.江苏省产业技术研究院机器人与智能装备技术研究所,常州 213164;3.常州先进制造技术研究所,常州 213164)
0 引言
手爪作为机器人末端执行机构的关键组成部分,其相当于人类的手,主要用于对工具或者工件进行握持和操作,承担着重要的操作执行功能。目前机器人手爪正朝着从简单到复杂,从笨拙向灵巧的方向发展,欠驱动手爪作为一种欠驱动机构的仿人机器人手爪,人手是其研究对象与灵感来源,属于多指手研究领域,目前被诸多研究者应用到机器人研究中。
中国科学院合肥物质科学研究院先进制造技术研究所对欠驱动手爪的研究工作已开展了多年,成功研制出了多种类型机器人欠驱动手爪,拥有多项发明专利,为欠驱动机构在机器人手爪中的应用积累了丰富的宝贵经验,并具有多个机器人成功应用欠驱动手爪的案例[1~3]。欠驱动手爪在欠驱动手指机构的基础上,研制形状自适应手爪机构,集成了具有被动柔顺和多种抓取功能的欠驱动手指机构,具有半主动柔顺指面和主动适应性,进一步增强了手爪对物体形状的适应能力,提高了手爪在实际应用中的可靠性。此类欠驱动手爪的设计充分吸纳了欠驱动机构的优点,具有独特的机械结构设计,具有驱动元件少、控制简单、抓取适应性强和出力大等优点。本文以此为研究基础,以实现欠驱动手爪在机器人系统中的灵活应用为目的而进行驱动控制器设计。
1 欠驱动手爪机械结构
如图1(a)欠驱动手爪实物样机所示[4~6],此款欠驱动手爪机构由形状自适应欠驱动手指、平行四边形精确捏取机构和手指位置调整机构三个部分组成。欠驱动手爪设计具有3个手指、手指基座外形为圆柱的形状,整体形状与人手相近,由手腕、手掌、手指以及各个手指的驱动传动机构和拇指位置调整机构组成,能很好的实现对物体的抓持和操作,手指安装到手掌上后,分别具有3个自由度,加上1个拇指机构旋转自由度,整个手爪共具有10个自由度。拇指旋转由一个安装在手掌内的步进电机驱动,通过拇指的旋转配合其他三个手指实现更多的抓取模式,拇指的旋转角度范围为0°~90°。
手指驱动传动机构如图1(b)所示[4~6],欠驱动手爪的3个手指机构的驱动传动机构的驱动电机采用微型力矩电机,可以直接在电机的旋转轴上配合设计螺纹副,从而将旋转运动转化成直线运动控制手指的开合。微型力矩电机带动其螺杆转动,螺杆的转动和导轨对螺母的限制作用又使得螺母沿螺杆移动,通过其正反转控制螺母的移动方向,通过控制螺母的移动距离从而与螺母连接的手指机构便处于不同的抓取、捏取或松开状态。
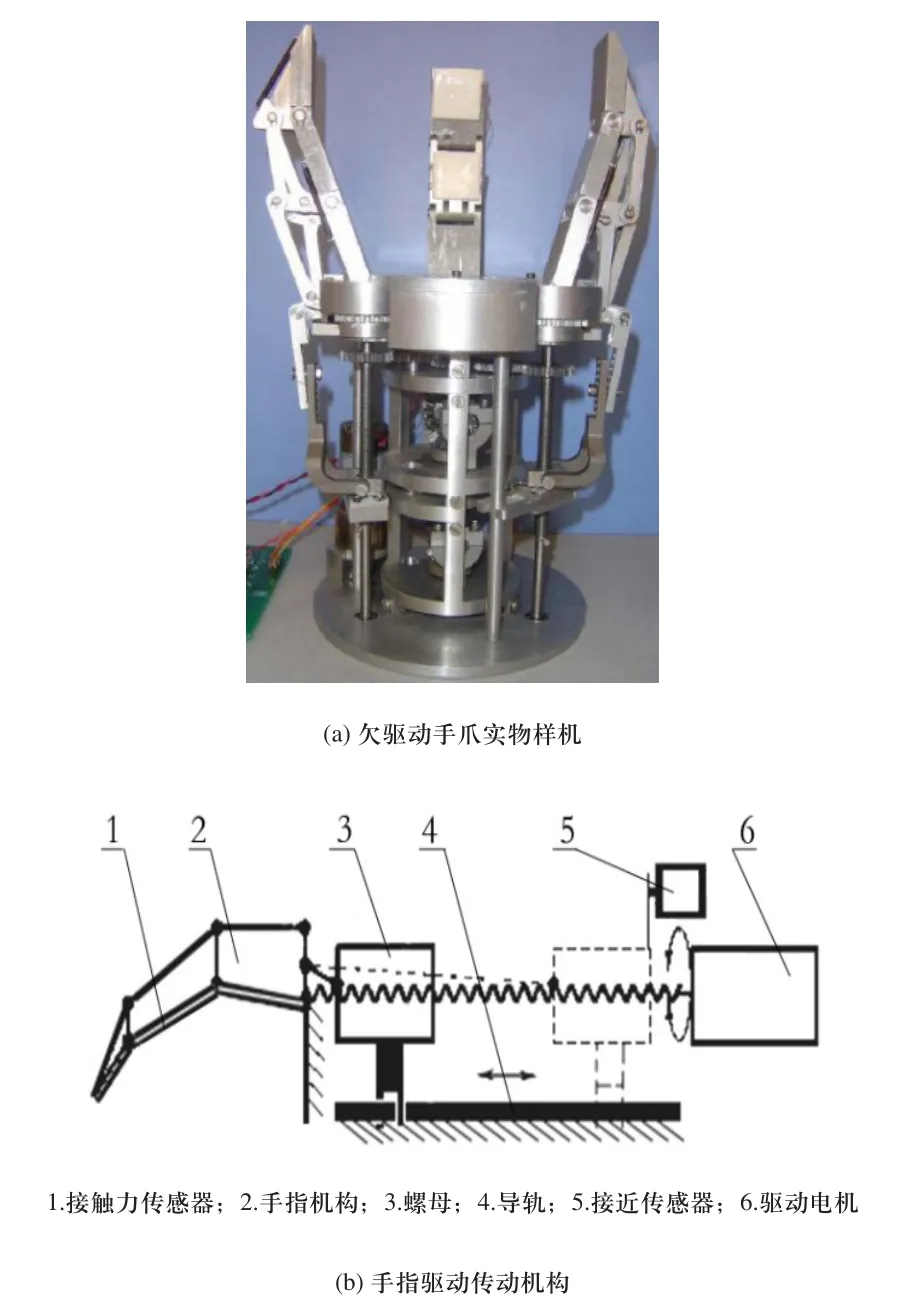
图1 欠驱动手爪实物样机与手指驱动传动结构
欠驱动手爪设计中,3个手指的9个指面均可安装触力传感器,根据实际需求选择安装(实验中只在每个手指末关节安装了传感器),用于感知被抓取物体并获取其相关信息。另外,在各手指的电机螺杆行程的末端极限位置以及旋转机构极限位置,分别设置有限位开关,用于限制螺母沿螺杆的最大行程和旋转机构的极限旋转位置以保护驱动传动机构。
2 驱动控制设计
2.1 驱动控制需求分析
欠驱动手爪的自适应抓取功能可分为包络抓取和精确捏取两大类,精确捏取分为三指平行捏取和三指对心捏取,包络抓取分为三指平行包络和三指对心包络抓取。以上为欠驱动手爪具备的动作能力,但是手爪作为执行机构,是具有被动性的,因此,若想在机器人系统中让欠驱动手爪完成机器人总控系统指定的任务,那么手爪必须与机器人系统进行集成应用,建立与之的通讯系统,这样手爪才能实时接受机器人系统总控的命令与指挥,以机器人为领导而做出动作,配合完成任务而实现应用。
综合考虑欠驱动手爪的机械结构设计与手爪功能设计后得出,欠驱动手爪的驱动、控制、检测对象总结起来由三个微型直流力矩电机、一个步进电机、9个可选触力传感器(设计中检测接口为3路)、4个限位开关以及与机器人系统的通讯接口组成,需要实现的功能为,机器人控制系统发送命令至驱动控制器,欠驱动手爪接收命令并执行,通过对手指指面触力的检测,结合电机电流检测,限位检测,实现手指速度与位置控制,从而实现对手指作用力的控制,完成欠驱动手爪的自适应抓取。
2.2 硬件设计
如图2所示驱动控制器总体由以下几部分组成:单片机MCU、电机驱动模块、电流采样模块、限位开关模块、压力传感器模块、CAN总线通讯模块及电源模块。其中电机驱动与电流采样模块分别包含了三个直流力矩电机及一个步进电机。

图2 驱动控制器统硬件框图
根据系统需求对单片机MCU进行选型,综合考虑各种资源需求,包括速度、存储、IO、AD、CAN模块等,最终选择飞思卡尔工业级单片机MC9S08DZ60,在满足丰富片上资源的同时,保证系统稳定可靠。电机驱动模块驱动手爪电机运动,电流采集模块用于对电机驱动电流进行采集,参与力计算的同时用于限流保护。单片机集成CAN控制器,经CAN驱动后与机器人控制系统的CAN接口组成CAN总线通讯,以此建立两者之间的通讯系统。
触力传感器采用FlexiForce Sensor的MODEL A201(0-25lbs(110N)),信号经过信号调理电路的调制、放大、滤波等处理后送至单片机进行AD采集、计算,数据采集校准及标定参考传感器的电导曲线进行[7]。
2.3 软件设计
如图3驱动控制器总体软件流程所示,机器人控制系统根据需求提出控制任务,并通过CAN总线进行命令发送,驱动控制器在接收任务后,对欠驱动手爪的四个电机执行驱动命令,驱动手指调节初始姿势,手指以预定速度运行,通过手爪上的接触力传感器获取抓取过程中的力信息,判断抓取稳定性,当手爪达到合适位置时,手爪对物体形成包络抓取或是精确捏取姿势,然后手指形成对被抓取物体的多点约束或是面约束,根据传感器反馈的信息形成闭环,根据控制算法判断是否完成了稳定抓取。
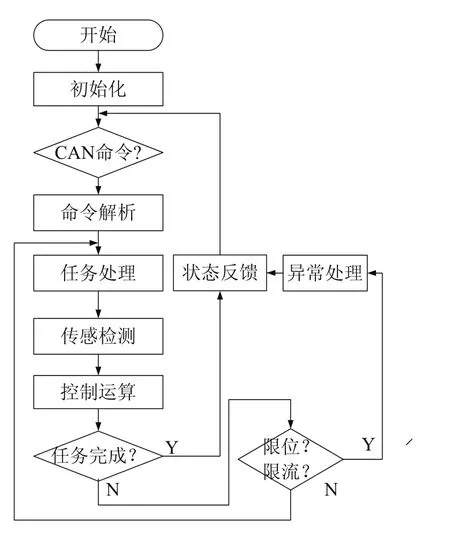
图3 驱动控制器总体软件流程
2.4 控制算法设计
接触力的控制是稳定抓取的关键,由于欠驱动手指的特点,输入和输出之间具有高度的非线性,各个手指面的接触力取决于物体对手指约束,抓取过程中可能出现某个接触力过大或是手指和物体没有接触的情况,造成不稳抓取或是损害物体。因此,手爪抓取采用基于传感器反馈的控制模式,关节指面安装接触力传感器,实时检测手爪在抓取物体过程中的动态接触力,判断手爪与目标物的接触状态,监测动态接触力的变化过程,并根据反馈结果来调整抓取的接触力大小。
单个手指的接触力控制采用如图4所示的模糊神经网络算法进行力的控制[8,9],其中Fd为期望接触力,Fn为实际检测到的触力,Ke、Kc、Ku分别为输入误差e、误差变化Δe及输出u对应的比例因子,限流保护用于避免因电流过大而损坏电机及驱动的保护环节。
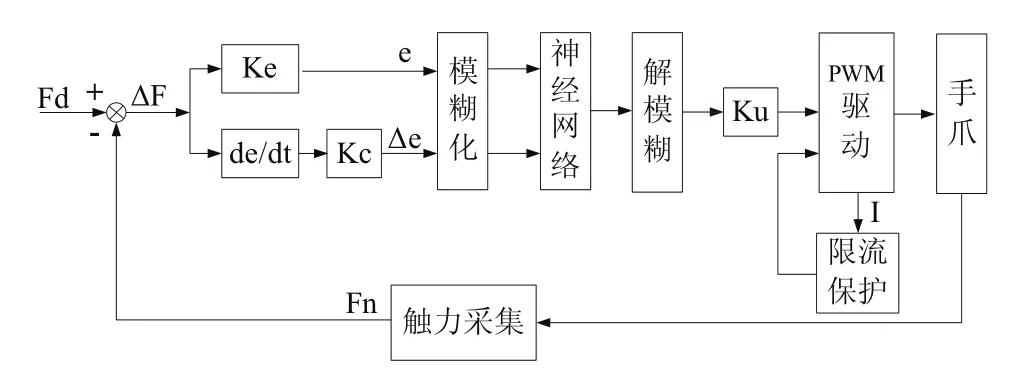
图4 模糊神经网络控制框图
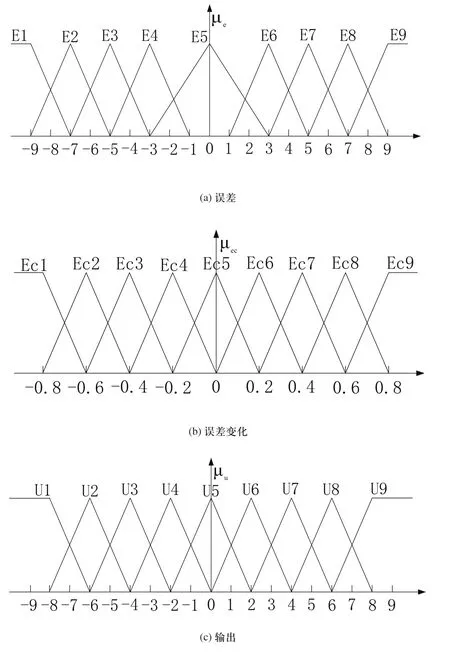
图5 误差、误差变化及输出隶属函数
其中输入误差e、误差变化Δe及输出u分别用模糊集E={E1,E2,…,E9},Ec={Ec1,Ec2,…,Ec9},U={U1,U2,…,U9}表示,E、Ec及U的隶属函数如图5所示。采用如表1所示控制规则表,设计原则为:当误差较大时,控制量的变化应尽量使误差迅速减小,当误差较小时,除了要消除误差,同时需要考虑系统稳定性,防止产生不必要的超调,甚至引起震荡。
便于在单片机中实现控制算法,采用Larsen模糊推理法结合神经网络结构实现解模糊方法,如图6所示。已知e=e0,Δe=Δe0,根据Larsen模糊推理法得到规则式:根据规则式共得出81条规则,分别对应9种输出选择,将对应于同一输出UK的ωij进行取最大处理:例如:运用神经网络结构进行去模糊化处理得到最终输出:
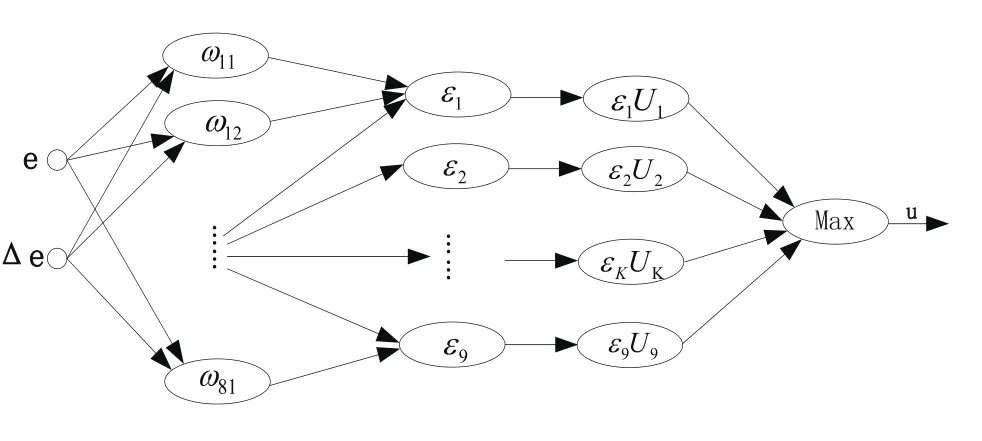
图6 模糊神经网络结构示意图
3 实践结果
根据欠驱动手爪机械结构设计具体要求,研制出控制驱动器样机,电路板实物如图7所示,电路板尺寸为直径6.5cm,结构紧凑,集成度高,体积小。电路板设计可以根据具体机械结构设计配合做出相应外形尺寸调整,具有一定灵活性与通用性。直流工作电压范围为12~24V,最高输出持续电流3A,峰值电流7A,工作温度-15℃~+85℃。经反复测试实验,样机整体性能指标达到使用要求,能够实现欠驱动手爪的驱动与控制。
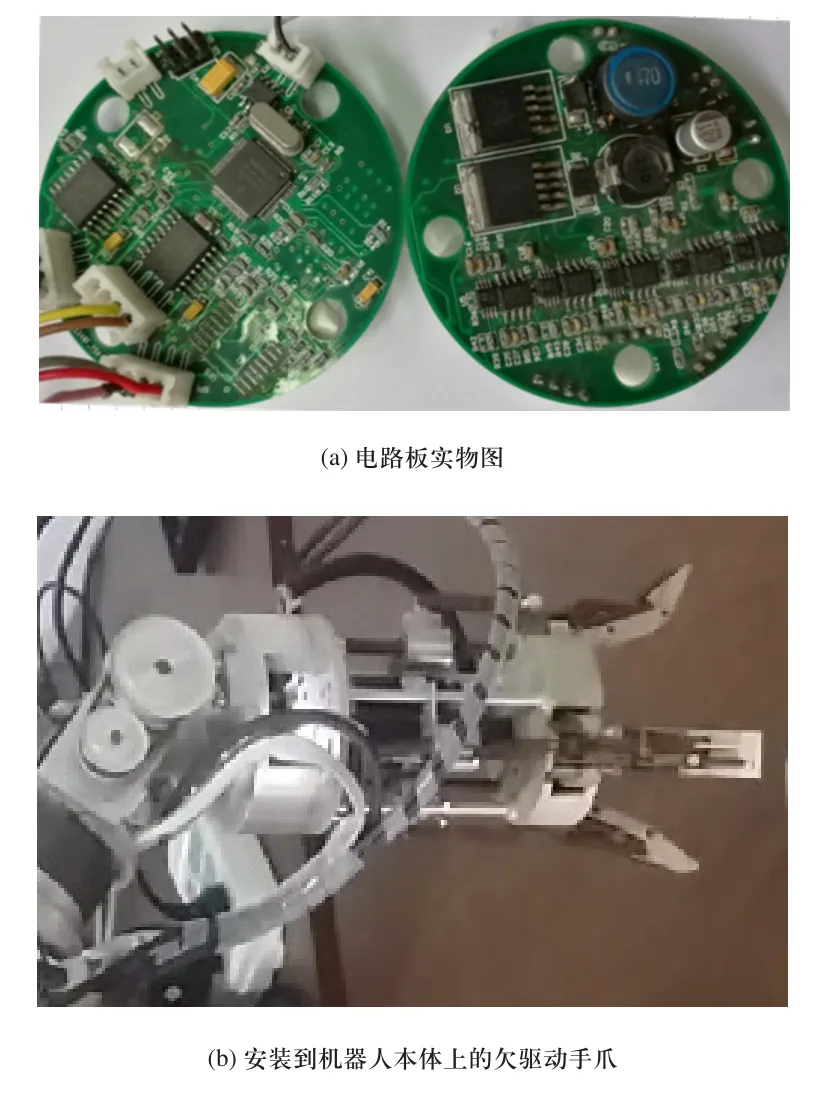
图7 实物图
将研制的欠驱动手爪及驱动控制器集成至工业机器人手臂上,构成高可靠性欠驱动多关节手爪抓取实验平台,通过大量抓取实验验证了驱动控制器设计的正确性和有效性[6,10,11]。
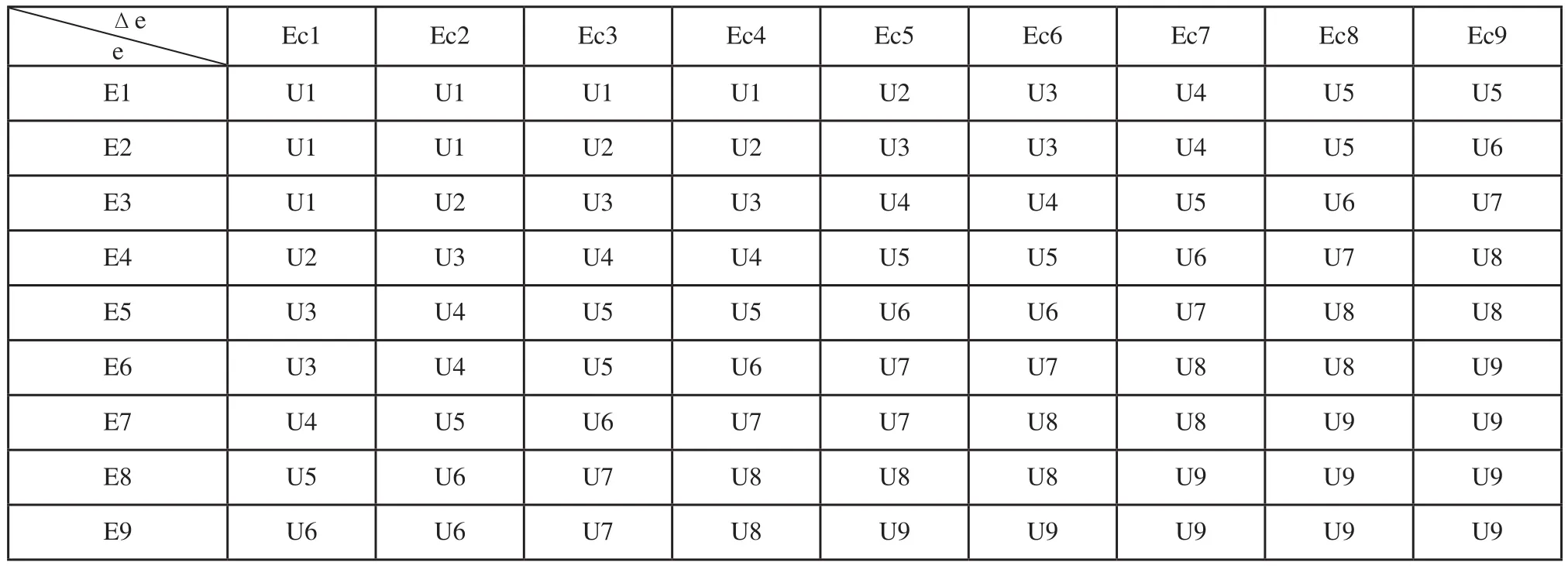
表1 模糊控制规则表
【】【】
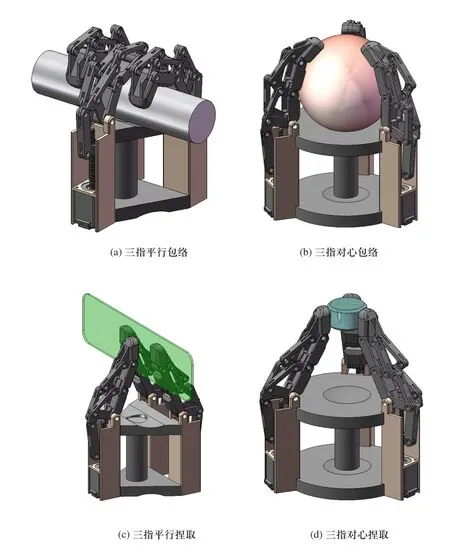
图8 欠驱动手爪抓取
4 结束语
针对目标欠驱动手爪的机械结构,分析驱动控制需求后,综合应用多项检测与控制技术,设计出了结构紧凑,集检测、驱动、控制及CAN总线传输于一体的欠驱动手爪驱动控制器,集成度高,功能完善,通过作用力控制,能够满足稳定抓取的功能需求。通过实验验证,欠驱动手爪驱动控制器能够实现目标欠驱动手爪在机器人系统中的应用,为欠驱动手爪的普及应用提供了便利,同时也为欠驱动手爪的模块化生产打下了基础。下一步将针对驱动控制器在宽范围电压输入、宽范围功率输出及模块化应用方面做进一步改进与完善。
[1]Minzhou Luo,Tao Mei,Grasp characteristics of an underactuated robot hand[A].In Proceedings of the 2004 IEEE International Conference on Robotics and Automation[C].New Orleans,America, April 26-May 1,2004,pp.2236-2241.
[2]LUO Min-zhou,MEI Tao.Analysis and simulation of enveloping grasp stability of the multi-phalange underactuated robot hand[J].Optics and Precision Engineering.VoI.12,NO.5,Oct.2004:510-517
[3]骆敏舟,梅涛,卢朝洪.多用途欠驱动手爪的自主抓取研究[J].机器人,2005,27(1):20-25,30.
[4]李涛,骆敏舟,张志华,路巍,徐林森.基于欠驱动机构的仿人机器人手爪设计[J].机电一体化,2010,16(1):29-33.
[5]李涛,骆敏舟,时张杰,徐林森.欠驱动仿人机器人手爪的精确捏取与包络抓取研究[J].机械设计,2009,26(11):42-44.
[6]李涛.基于欠驱动机构的仿人机器人手爪研究[D].合肥:中国科学技术大学,2009.
[7]FlexiForce Sensor User Manual (Rev H). http://www.tekscan.com.
[8]李伟.基于触觉传感器的仿人假手抓取控制研究[D].哈尔滨:哈尔滨工业大学,2014.
[9]潘伟.基于嵌入式的机器人多传感器及信息融合系统研究[D].杭州:杭州电子科技大学,2012.
[10]张波,陈丹惠,陈俭.双臂机器人多功能欠驱动手爪的研制[J].产业与科技论坛,2017,16(1):69-70.
[11]丁玲,孙鹏,李开霞,赵江海,王容川,叶晓东.一种机械手爪的控制装置及其控制方法[P].发明专利,申请号:201610413425.4,2016.
