低频电磁的管道内检测器跟踪定位技术*
2018-01-08杨理践高松巍
杨理践,申 晗,高松巍,刘 斌
(沈阳工业大学 信息科学与工程学院,沈阳 110870)
信息科学与工程
低频电磁的管道内检测器跟踪定位技术*
杨理践,申 晗,高松巍,刘 斌
(沈阳工业大学 信息科学与工程学院,沈阳 110870)
针对管道内检测器在运行过程中的跟踪定位问题,提出了基于低频电磁的管道内检测器跟踪定位方法,分析了低频磁信号传播特性和发射线圈磁场分布特点,设计了搭载在管道内检测器上的低频磁信号发射机和手持式低频磁信号接收机.采用高磁导率坡莫合金管作为发射线圈磁芯,减少了涡流损耗,采用串联谐振提高了发射效率;设计感应式接收线圈,通过并联谐振提高了信号接收范围和信噪比.结果表明,该跟踪定位系统具有良好的稳定性和可靠性,接收信号具有对称特性.在实际工程应用中,该系统有效定位距离可达8 m,提高了管道内检测器跟踪定位范围.
低频;发射线圈;接收线圈;管道内检测;跟踪定位;串联谐振;并联谐振;涡流损耗
油气管道是国家的能源命脉,为保障管道长期安全、正常运行,必须对管道进行定期检测与维护.目前,主要的检测方式是采用管道内检测器进入管道内部沿管线运行而实现对管道的在线无损检测.在检测过程中,为监测管道内检测器实时位置,确保管道内检测器安全有效运行,必须实时跟踪定位检测器的位置和运行状态.

本文分析了低频信号的传播特性和发射线圈磁场分布特点,设计了管道内检测器跟踪定位系统.该系统具有良好的稳定性和可靠性,在实际工程中应用中,有效定位距离可达8 m,接收信号具有对称特性,提高了管道内检测器跟踪定位范围.
1 内检测器低频跟踪定位原理
管道内检测器跟踪定位主要根据发射机经过接收机下方时,接收机接收到的信号变化判断发射机位置,从而实现对管道内检测器的跟踪定位,图1所示为管道内检测器跟踪定位示意图.
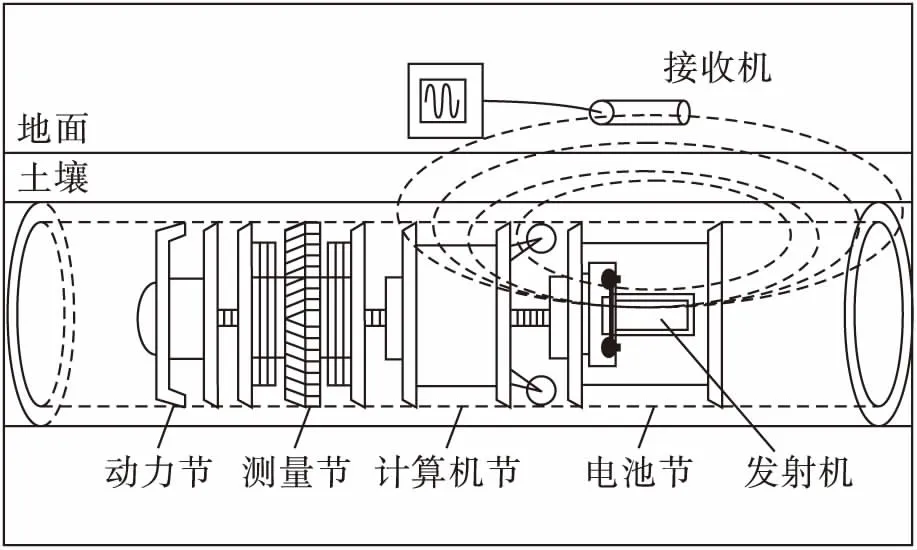
图1 管道内检测器跟踪定位示意图Fig.1 Schematic tracking and positioning diagram for pipeline internal detector
在管道内检测器电池节上安装1个低频磁发射机,并沿着管线在地面上每隔一定距离放置一个低频磁接收机.当进行管道内检测时,装载有低频磁发射机的管道内检测器经过低频磁接收机下方,低频磁接收机通过接收判断低频磁发射机产生的低频磁信号,实现对管道内检测器的实时跟踪定位.
1.1 低频信号传播特性
在实际工作中,发射线圈产生的磁信号受到管壁、土壤及海水等介质屏蔽和阻碍,磁场强度以指数形式衰减.衰减率α与频率f和介质电导率σ乘积的平方根成正比,趋肤深度δ和衰减率α与频率f的关系式[8]分别为
(1)

(2)
式中:μ0为真空磁导率;σ为电导率.
由式(1)、(2)可知,信号的衰减率α与信号频率f和介质的电导率σ有关.当介质电导率σ一定时,信号频率f越低,衰减率α越低,趋肤深度δ越大.
在实际工程中,管道内检测器通常工作在地下管道或海底管道中,具有高电导率的金属管壁是导致信号衰减的主要因素,因此欲提高传输距离,必须采用低频信号.
1.2 发射线圈磁场分布
图2所示为发射线圈磁场分布示意图,由于发射线圈具有对称性,只需计算yoz平面内磁场的分布即可描述整个发射线圈磁场分布特点,y、z方向分别表示径向和轴向.
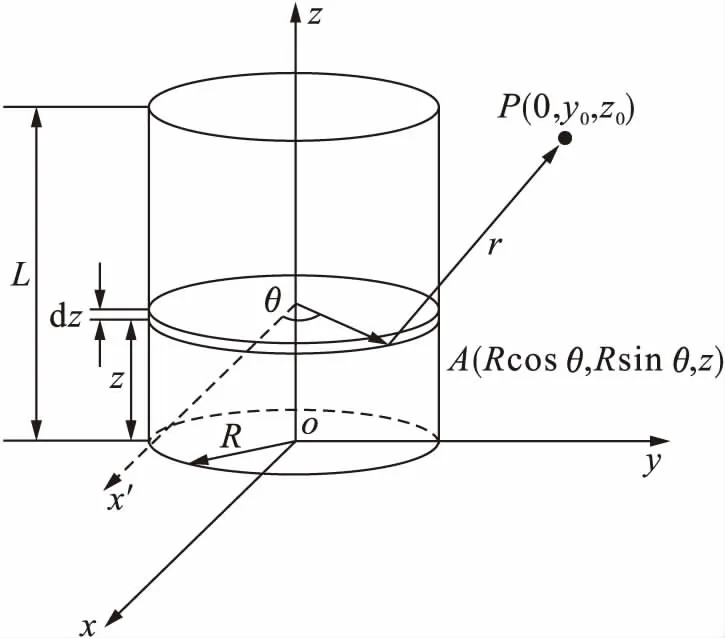
图2 发射线圈磁场分布示意图Fig.2 Schematic magnetic field distribution diagram for launch coil
在yoz平面内取点P(0,y0,z0),在轴向方向上z处取厚度为dz的环,该环电流为I′=nldz.在A点处取电流元I′dl,根据毕奥萨伐尔定律,电流元I′dl在点P产生的磁感应强度为
(3)
式中:r为电流环到P的距离;I为发射线圈上电流;n为发射线圈单位长度匝数;dl为电流的微小线元素.
利用矢量乘法可计算得磁感应强度dB在yoz平面上的轴向分量,即
(4)
式中:y0为P点距发射线圈径向距离;θ为A点与x轴方向夹角.
对式(4)进行积分运算,发射线圈在P点的磁感应强度轴向分量为

(5)
若令发射线圈半径R=10 mm,长度L=20 mm,则当距发射线圈径向距离y0不变时,轴向分量磁感应强度Bz随轴向距离z变化的曲线如图3所示.
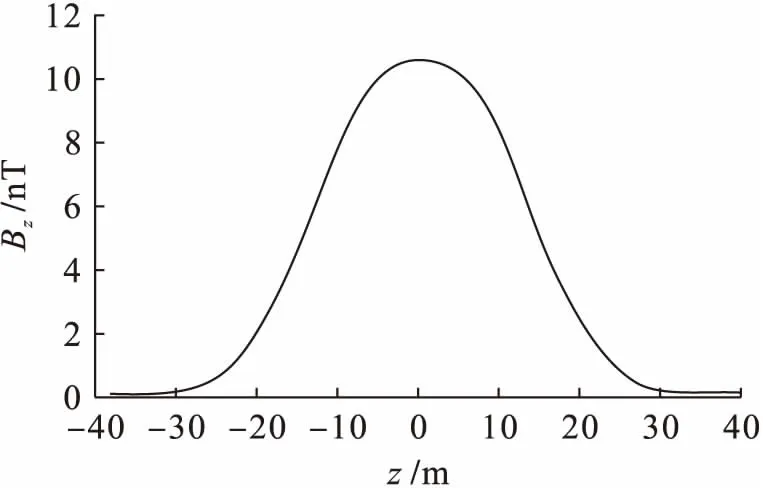
图3 磁感应强度随轴向距离变化的曲线Fig.3 Varying curve of magnetic induction intensity with axial distance
发射线圈轴向方向磁感应强度随轴向距离的增加,先增加后减小,位于发射线圈中心位置时磁感应强度最大,发射线圈磁感应强度曲线呈对称分布特性.
由发射线圈磁感应强度曲线呈对称分布特性可知,当低频磁接收机放置在与管道轴向方向平行的地面上,管道内检测器由远及近逐渐通过低频磁接收机正下方时,接收机接收信号幅值亦呈对称分布,接收机信号幅值逐渐变大再变小,实现对管道内检测器的跟踪定位.
2 跟踪定位系统
管道内检测器跟踪定位系统主要由低频磁发射机和低频磁接收机两部分组成,系统结构框图如图4所示.
信号单元产生方波电压信号,通过驱动电路加载到发射线圈,激励出一定频率的电流信号,在空间建立磁场.变化的磁场信号透过管道及其所处环境的介质,被位于表面的接收线圈接收,发射机移动时,接收线圈接收的磁场信号也随之变化,对接收到的信号进行处理,提取所需信号信息进行显示,实现跟踪定位.
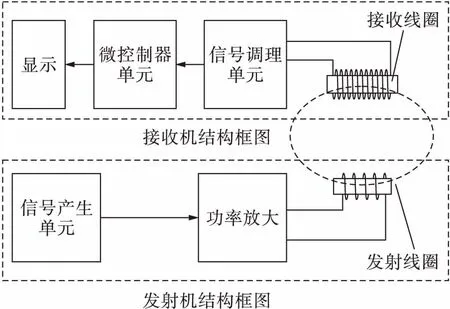
图4 系统结构框图Fig.4 Structure diagram of system
2.1 低频磁信号发射
低频磁发射机采用STM32系列单片机作为信号产生单元,产生23 Hz方波信号,经过MAX9768BE功放模块驱动后,加载到发射线圈两端,在空间建立低频磁场,将发射机与接收机“联系”起来.低频磁发射机体积小,便于携带,采用12 V电源供电,功耗低,电流幅值仅为78 mA.
为提高发射线圈产生的磁场强度,采用漆包线缠绕磁芯形式构成发射线圈,其结构示意图如图5所示,聚酯亚胺薄膜用于绝缘和保护线圈.
磁芯材料选用坡莫合金,坡莫合金具有很高的弱磁场磁导率,其饱和磁感应强度达0.6~1 T,电阻率为60~85 μΩcm,适合在低频条件下使用.
磁芯涡流损耗为发射线圈主要损耗[9],设单位体积磁性材料的涡流损耗为p,涡流损耗p与磁芯材料参数及尺寸关系[10]为

(6)
式中:Ce为磁芯涡流损耗系数,取决于磁芯材料电阻率;a为磁芯材料厚度;f为发射线圈中通入电流频率;Bm为磁感应强度幅值;V为磁芯体积.
由式(6)可知,磁芯的涡流损耗与材料的厚度平方成正比,为减小涡流损耗,传感器磁芯采用管状形式,利用漆包线绕制在坡莫合金管磁芯外部,构成发射线圈.
为提高发射线圈发射信号磁场强度,选择合适匹配电容与发射线圈构成串联谐振回路,发射线圈及其等效电路如图6所示.
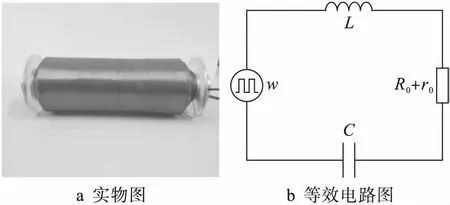
图6 发射线圈及等效电路Fig.6 Launch coil and equivalent circuit
图6中,w为信号单元产生的23 Hz低频方波信号,L为线圈电感值,C为线圈分布电容和传感器匹配电容,r0为线圈内阻.
发射线圈相当于电感,根据式(7)选取合适参数的匹配电容,构成串联回路,即

(7)
串联回路的输入阻抗为
(8)
当电路谐振频率与信号频率相同,则电路发生谐振时,容抗和感抗相等,电路中阻抗最小,呈现纯阻特性,电流最大.此时发射线圈电感和电容两端电压升高,有利于提高低频磁发射机发射效率.
2.2 低频磁信号接收与处理
低频信号经管道和土壤等介质屏蔽,分布在空间中的磁场信号极其微弱,易被背景噪声所掩盖,因此低频磁接收机设计中采用高分辨率接收线圈接收低频磁信号,同时对信号进行放大、滤波调理,提高信号信噪比,低频磁信号接收与处理框图如图7所示.
接收线圈主要用于接收低频磁发射机产生的低频磁信号,采用感应式磁传感器形式,外部包裹铝箔屏蔽层用于屏蔽高频信号干扰.
根据法拉第电磁感应定律,匝数为N,截面积为As的线圈放在随时间变化的磁场B(t)中时,线圈中产生的感应电动势为
(9)
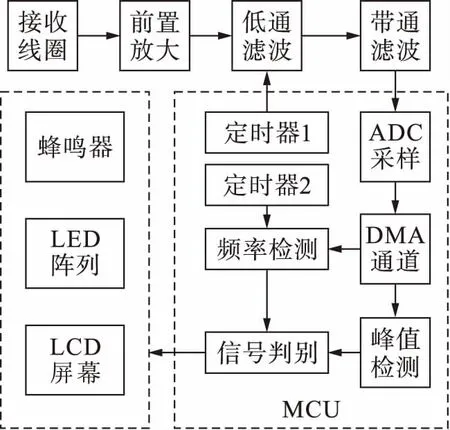
图7 低频磁信号接收与处理框图Fig.7 Block diagram for receiving and processing of low frequency magnetic signal
式中:As为接收线圈的等效横截面积;μr为磁芯相对磁导率;i(t)为激励电流.
实际上,接收线圈输出的电压信号并不是接收线圈上的感应电动势ε,而是电容两端的电压输出U,接收线圈及其等效电路如图8所示.
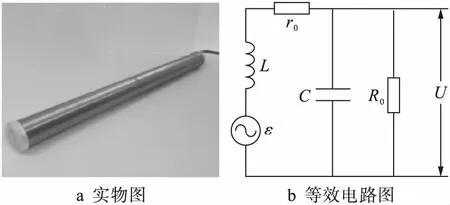
图8 接收线圈及等效电路Fig.8 Receiving coil and equivalent circuit
由图8分析可知,接收线圈输出的电压为
(10)
接收线圈输出的电压信号不仅与发射线圈产生的空间磁场强度有关,还与接收线圈本身的材料属性和尺寸参数有关.接收线圈采用具有高磁导率的1J85坡莫合金作为磁芯,采用多匝线圈密绕形式制成,接收效果良好.
信号调理电路主要用于对接收线圈产生的低频电压信号进行放大、滤波处理,提供给MCU电路进行判决处理.
前置放大器是降低噪声电压的关键,选用TLC2652芯片,其具有优异的直流特性,共模抑制比高,适合于微弱信号的放大.为满足系统需求,采用两级放大电路,反馈电路中通过调节电阻R13和电阻R17阻值实现不同放大倍数,前置放大电路如图9所示.
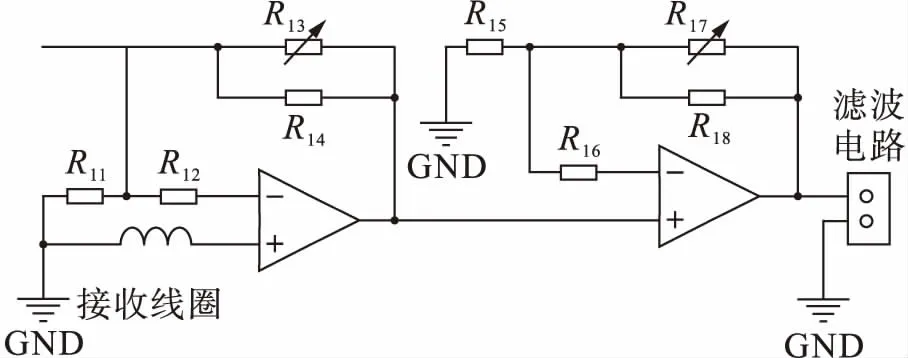
图9 前置放大电路Fig.9 Preamplifier circuit
低通滤波电路主要采用LTC10691八阶低通椭圆滤波芯片,其具有陡峭的衰减特性,利用MCU中定时器提供所需的时钟脉冲信号,用于滤除前置放大器输出信号中的高频噪声信号和工频干扰信号,提高信噪比.
信号经前置放大和低通滤波处理后,再通过LTC1068-200芯片组成的多级带通滤波电路,以实现高品质因数、高增益的窄带滤波处理,最终实现信号调理.
微控制器处理单元采用STM32F103RBT6单片机,其带有12位的具有直接存储器存取的ADC,满足低频信号的采样需求.接收到的信号经过信号调理电路后,满足单片机AD采样的电压输入范围.将调理后的信号利用MCU内部的ADC进行采样,通过DMA通道对信号进行峰值检测和频率检测.将采集后的数据存储到片内存储中,设置阈值,对信号进行判别,利用蜂鸣器和LED指示灯阵列变化情况,判定接收机与发射机相对位置的变化.
3 实验与结果分析
3.1 实验方法
将低频磁发射机搭载在管道内检测器上,放置在与管道轴向方向平行的管道内部,将低频磁接收机平行放置在管道上方的地面上,低频磁发射机持续向外发射低频磁信号,实验示意图如图10所示.
3.2 结果分析
当管道内检测器在管道中由远及近逐渐通过低频磁接收机正下方时,接收线圈上输出电压具有对称分布特性;当管道内检测器上的发射机位于低频磁接收机正下方时,接收线圈输出电压最大;当发射机逐渐远离低频磁接收机时,接收线圈输出电压逐渐变小.当二者距离约为8 m时,调理输出信号电压幅值趋近于零,说明在实际工程应用中,该低频定位系统有效跟踪定位距离可达8 m.
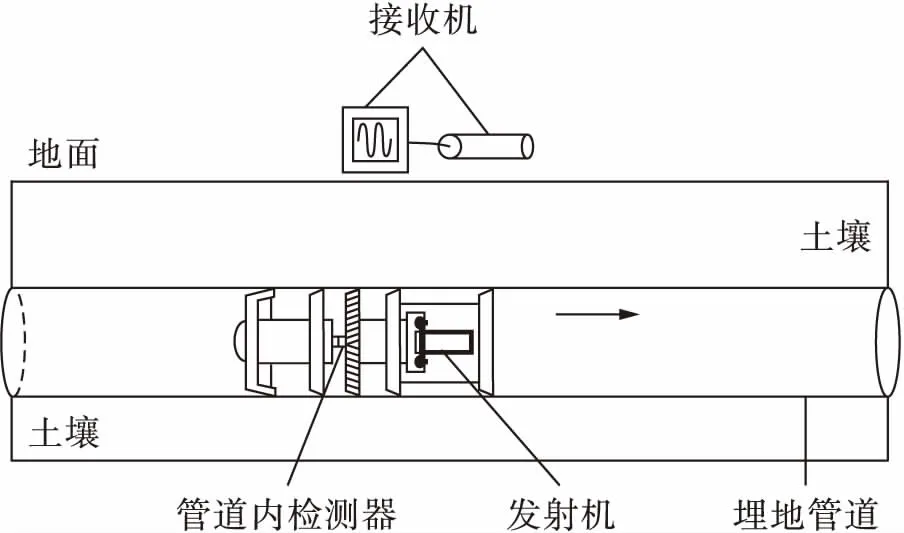
图10 实验示意图Fig.10 Schematic diagram for experiment
当管道内检测器行进速度分别为1、2、3和4 m/s时,接收机接收信号判别情况如表1所示.
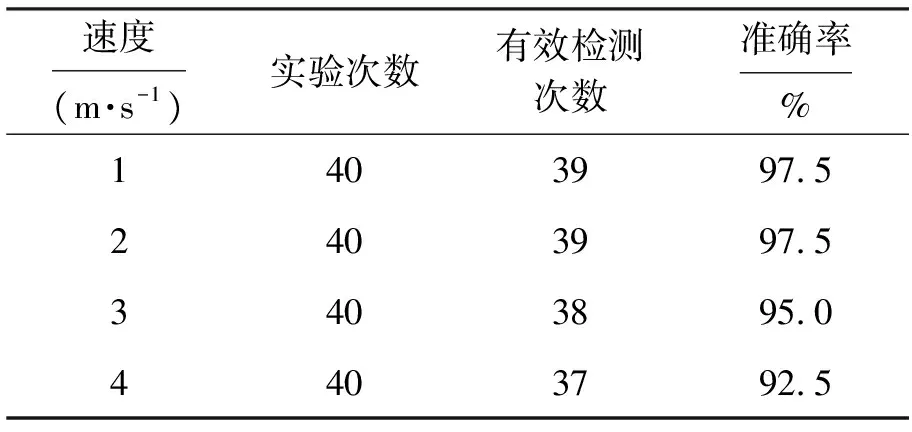
表1 实验数据Tab.1 Experimental data
由表1可知,管道内检测器运行速度越快,发射线圈产生的磁场通过接收机的时间越短,检测信号越难判别,系统的准确率越低.当管道内检测器在管道中以4 m/s的速度运行时,跟踪定位系统仍能可靠工作,具有良好的稳定性和可靠性,满足实际工程中管道内检测器实时跟踪定位需求.
4 结 论
通过以上分析,可以得到结论如下:
1) 信号频率越低,衰减率越小,低频信号可透过土壤和管壁传播,适合在管道内检测定位应用;
2) 发射线圈轴向方向磁感应强度随轴向距离的增加,先增加后减小,位于发射线圈中心位置时磁感应强度最大,发射线圈轴向方向磁感应强度具有对称分布特性;
3) 采用高磁导率坡莫合金管结构作为发射线圈磁芯,可有效减少涡流损耗,提高信号发射效率;
4) 基于低频电磁技术的管道内检测器跟踪定位系统,具有良好的稳定性和可靠性,在实际工程中应用时,有效定位距离可达8 m,满足长输油气管道工程中对管道内检测器的实时跟踪定位需求.
[1] 杨理践,李晖,靳鹏,等.管道地理位置测量系统的动态初始对准方法 [J].沈阳工业大学学报,2015,37(6):656-661.
(YANG Li-jian,LI Hui,JIN Peng,et al.Dynamic initial alignment method for geographic position measurement system of pipeline [J].Journal of Shenyang University of Technology,2015,37(6):656-661.)
[2] 蔡雄,陈水平,张志文,等.油气管道检测用极低频磁信号收发系统的实验研究 [J].清华大学学报(自然科学版),2014,54(12):1615-1620.
(CAI Xiong,CHEN Shui-ping,ZHANG Zhi-wen,et al.Experimental research on the transmitting and receiving system for ELF magnetic signals for oil and gas pipeline inspections [J].Journal of Tsinghua University (Science and Technology),2014,54(12):1615-1620.)
[3] 陈水平,郭静波,胡铁华.铁磁管道环境下极低频微弱磁场的分布及检测 [J].仪器仪表学报,2011,32(10):2348-2356.
(CHEN Shui-ping,GUO Jing-bo,HU Tie-hua.Distribution and detection of ELF weak magnetic field in ferromagnetic pipeline environment [J].Chinese Journal of Scientific Instrument,2011,32(10):2348-2356.)
[4] 郭静波,谭博,蔡雄.基于反相双峰指数模型的微弱瞬态极低频信号的估计与检测 [J].仪器仪表学报,2015,36(8):1682-1691.
(GUO Jing-bo,TAN Bo,CAI Xiong.Estimation and detection of the weak transient ELF signal based on the phase inverting double-peak exponential model [J].Chinese Journal of Scientific Instrument,2015,36(8):1682-1691.)
[5] Qi H,Ye J,Zhang X,et al.Wireless tracking and locating system for in-pipe robot [J].Sensors & Actuators A Physical,2010,159(1):117-125.
[6] Qi H,Zhang X,Chen H,et al.Global localization of in-pipe robot based on ultra-long wave antenna array and global position system [J].High Tech Communication,2009,15(2):120-125.
(WEI Ming-sheng,TONG Min-ming,ZI Bin.Pipeline robot localization system based on PSO-BFGS hybrid algorithm [J].Chinese Journal of Scientific Instrument,2012,33(11):2594-2600.)
[8] 王少平,刘金海,高丁,等.海底管道内检测器实时跟踪与精确定位 [J].无损检测,2013,35(9):26-30.
(WANG Shao-ping,LIU Jin-hai,GAO Ding,et al.A method of tracking and precisely pocating submarine in-line inspection Tool [J].Nondestructive Testing,2013,35(9):26-30.)
[9] 邵英秋,程德福,王言章,等.高灵敏度感应式磁传感器的研究 [J].仪器仪表学报,2012,33(2):349-355.
(SHAO Ying-qiu,CHENG De-fu,WANG Yan-zhang,et al.Research of high sensitivity inductive magnetic sensor [J].Chinese Journal of Scientific Instrument,2012,33(2):349-355.)
[10]陶伟,张世田,刘新安,等.极低频/超低频/甚低频宽带磁传感器技术研究 [J].电波科学学报,2012,27(3):182-186.
(TAO Wei,ZHANG Shi-tian,LIU Xin-an,et al.ELF/SLF/VLF broadband H-filed sensor [J].Journal of Radio Science,2012,27(3):182-186.)
Lowfrequencyelectromagnetictrackingandpositioningtechnologyforpipelineinternaldetector
YANG Li-jian, SHEN Han, GAO Song-wei, LIU Bin
(School of Information Science and Engineering, Shenyang University of Technology, Shenyang 110870, China)
Aiming at the tracking and positioning problem of pipeline internal detector in its operating process, a low frequence electromagnetic tracking and positioning method for the pipeline internal detector was proposed, and the propagation characteristics of low frequency magnetic signal and the distribution characteristics of magnetic field generated by the launch coil were analyzed.In addition, a low frequency magnetic signal transmitter mounted on the pipeline internal detector and a portable low frequency magnetic signal receiver were designed.The permalloy with high magnetic permeability was taken as the magnetic core of launch coil to reduce the eddy current loss, and the series resonance was used to improve the emission efficiency.The induction type receiving coil was designed, and the signal receiving range and signal noise ratio were improved through adopting the parallel resonance.The results show that the proposed tracking and positioning system has good stability and reliability, and the
signal has the symmetrical characteristics.In the practical engineering application, the effective positioning distance of the system is 8 m, and the tracking and positioning range of pipeline internal detector gets improved.
low frequency; launch coil; receiving coil; pipeline internal detection; tracking and positioning; series resonance; parallel resonance; eddy current loss
2016-12-22.
国家自然科学基金资助项目(61571308);科技部国家重大仪表专项基金资助项目(2012YQ090175);辽宁省教育厅资助项目(L2015388).
杨理践(1957-),男,湖南长沙人,教授,博士生导师,主要从事管道检测及无损检测技术等方面的研究.
* 本文已于2017-10-25 21∶12在中国知网优先数字出版.网络出版地址:http://kns.cnki.net/kcms/detail/21.1189.T.20171025.2112.030.html
10.7688/j.issn.1000-1646.2018.01.09
TM 937
A
1000-1646(2018)01-0048-06
景 勇 英文审校:尹淑英)
