基于INNOSTAR平台的武术擂台机器人设计与实现
2018-01-02李正洁李元金
王 杨,李正洁,李元金,程 科
(1.滁州学院 计算机与信息工程学院;2.江苏科大智慧海工装备有限公司,江苏 镇江 212000;3.滁州学院 发展规划处,安徽 滁州 239000)
基于INNOSTAR平台的武术擂台机器人设计与实现
王 杨1,2,李正洁3,李元金1,程 科2
(1.滁州学院 计算机与信息工程学院;2.江苏科大智慧海工装备有限公司,江苏 镇江 212000;3.滁州学院 发展规划处,安徽 滁州 239000)
目前机器人广泛应用于各领域,本文设计的武术擂台机器人采用北京博创科技有限公司提供的“创意之星”套件来实现的,基于INNOSTAR平台,利用灰度传感器、红外测距传感器、红外传感器、电机、舵机及相关部件来搭建,并验证机器人外形的科学性,在合理的范围内自主完成武术擂台机器人的设计与实现.控制机器人部件的软件程序是通过C语言编写的,通过实验测试表明,机器人实现了登台、攻击、起身等动作,并模拟人的形态、基本动作和简单的思维,基本满足功能设计需求.
武术擂台机器人;INNOSTAR平台;“创意之星”套件;传感器;智能化
在当今信息化社会,机器人技术不断地发展进步,融合了电子、机械、传感器、自动控制和人工智能等众多先进技术.从20世纪以来,机器人技术的出现不仅标志人类技术的进步,还是人们迈向新时代的第一步.在经过多年的发展,机器人技术经历了诞生到成长,如今已经步入青年,正处于朝气蓬勃的时期,已经成为全世界公认的不可少的核心技术.世界上有约100万台机器人正在帮助人们完成各种任务,在工业上有各种各样的工业机器人协助人们完成日常工作,在生活上有娱乐、服务、医疗机器人等,还有很多如仿人机器人、军用机器人、农业机器人、空中机器人、水下机器人、消防救援机器人等各种用途的机器人应用于人类的生活中,通过设计、制作、调试,可以激发科技人员的想象力和工程潜力,培养设计能力、创新能力、动手能力、合作精神.本文设计的武术擂台机器人就是立足于此.
1 武术擂台机器人硬件分析
武术擂台机器人硬件框图如图1所示.
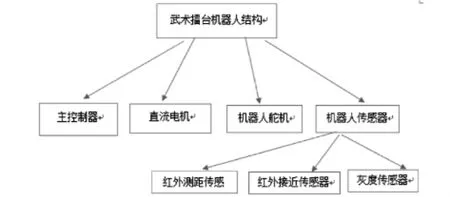
图1 硬件框图
机器人的主控制器是机器人的大脑,本文选用MultiFLEXTM2-AVR控制器作为主控器,电机选取“创意之星”标准配备的直流电机,该电机采用外电源通过BDMC1203驱动器连接控制器来控制直流电机转动,机器人的动力关节采用舵机来代替,该舵机集成了直流电机、电机控制器和减速器等,既可以作为电机使用也可以作为舵机使用,都是通过输入数字模拟信号来控制其运行,传感器作为机器人的眼睛尤为重要,一个反应灵敏的机器人,其传感器起着至关重要的作用.
2 武术擂台机器人外形设计
2.1 机器人底盘设计
机器人地盘设计,首先电机与舵机我们选取电机,而且使用4个电机,因为电机的重量比舵机重,4个电机可以大大增加机器人的下身重量,降低机器人的中心,并且4个电机可以增加机器人与地面的接触点,以至于不易被推到.其次,地盘下在前后电机之间各安装一个灰度传感器,用于检测武术擂台的颜色变化,同时2个灰度传感器方便对比,机器人总是向颜色淡一点的方向转动.
2.2 机器人腿部设计
机器人腿部采用2个舵机作为机器人上身与腿部的动力关节,腿部与底盘采用螺丝固定在一起,可以单只腿与地盘之间添加固定装置,以保证机器人的稳定性.
2.3 机器人手部设计
机器人手臂采用3个舵机作为动力关机,因为手臂肩关节有高度要求,所以手臂的重量不易太重,太重会增加机器人的上半身量,导致起重量偏高容易摔倒.
2.4 机器人头部及胸部设计
机器人胸部最低端离地面的高度30cm,头部可以适当增加高度,使机器人的器人总高度不得低于50cm.
3 武术擂台机器人程序设计
3.1 武术擂台机器人程序设计平台介绍
在NorthStar编程环境里,可以采用全代码的形式编写程序,完全通过C语言编写代码,具体如图2所示.

图2 NorthStar软件代码化界面图
3.2 机器人登台模块程序设计
根据擂台的结构设计,出发及登台区用正蓝色,高15cm,宽40cm,程序设计如下:
对于正蓝色:通过机器人地盘下两个灰度传感器和后方一个红外传感器判断是否启动登台程序.灰度传感器i1检测蓝色返回的模拟数字大约630,灰度传感器i2检测蓝色返回的模拟数字大约690,误差在10左右,具体代码如下.
i1=MFGetAD(1);//灰度传感器输入数据;
i2=MFGetAD(2);//灰度传感器输入数据;
IR2=MFGetDigiInput(2);//红外传感器输入数据
if(IR2==0&&(i1>630&&i2>690))//红外测距传感器与灰度传感器判断登台条件;
{
while(i1>630&&i2>690)

3.3 机器人攻击模块程序设计
机器人攻击由两个红外测距传感器共同决定攻击方式,当传感器i0的值大于等于15或者传感器i5大于等于30时,说明前方有敌人,需采取攻击方式.当敌人仍没有倒并且还继续靠近,需加大攻击力度,攻击动作1与2及快与慢的结合,以此来推倒敌人,具体代码如下.


3.4 机器人起身模块程序设计
机器人摔倒起身动作,主要是由机器人的右臂和腿部的舵机协调完成.本次机器人起身模块程序设计主要考虑了机器人前倒和后到,前倒后倒都有5个动作组合,具体每个动作的模拟数值如表1所示.
void Before_the_fall1()//前倒起身动作1
{


表1 前、后倒起身动作模拟数值表
4 结论
本文利用了灰度传感器、红外传感器、红外测距传感器、电机、舵机及相关部件来设计武术擂台机器人,具有登台、攻击、起身等动作,模拟人的形态、基本动作和简单的思维,并通过模拟擂台的测试基本满足功能设计需求,但设计出的武术擂台机器人也存在后续要解决的问题,机器人传感器的适用,无法实现机器人的实时监控,机器人只能在执行某个特定的程序时才对外检测,因此采用缩短其他程序执行的延时,让这个盲区持续的时间尽量缩短,今后考虑引入高清摄像头来实施监控.
〔1〕王田.全力推进我国机器人技术[J].机器人技术与应用,2007,10(2):17-23.
〔2〕杨学军,丁盖盖.防守型武术擂台机器人的研究与实践[J].机器人技术与应用,2009,5(4):44-46.
〔3〕李卫国,王志刚.进攻型武术擂台机器人的研究与实践[J].机器人技术与应用,2009,5(4):41-43.
〔4〕张悦,盖之慧,赵伟,杨博,夏庆锋.武术擂台技术挑战赛机器人整体设计[J].机器人技术与应用,2010,6(4):38-40.
〔5〕王志良,周桌.竞赛机器人制作技术[M].北京:机械工业出版社,2007.
〔6〕江海波,王卓然,耿德根.深入浅出 AVR 单片机—从 ATmega48/88/168开始[M].北京:中国电力出版社,2008.
〔7〕方浩,王永武,吴志明.中国机器人大赛的思考[J].科技创新导报,2009,6(4):209-211.
〔8〕刘银萍.足球机器人路径规划技术的现状与展望[J].伺服控制,2007,10(9):20-22.
〔9〕Canamero L.Emotion Understanding from the Perspective of Autonomous Robots Research.Neural Networks,2005,10(85):28-30.
〔10〕UedaK,UmedaA.Characterization ofshock accelerom etersusing davies barand strain-gages[J].Experimental Mechanics,1993,6(82):228-233.
G642
A
1673-260X(2017)12-0023-03
2017-09-23
安徽省自然科学基金项目(1308085MF96)滁州学院教学质量工程项目(2016kcgg015)
