任务驱动法在现代控制理论课程教学改革中的应用
2017-11-07王立红
王立红
(辽宁工业大学 电气工程学院,辽宁 锦州 121001)
任务驱动法在现代控制理论课程教学改革中的应用
王立红
(辽宁工业大学 电气工程学院,辽宁 锦州 121001)
现代控制理论课程的特点是理论性较强,公式繁多,计算复杂。如果单纯采用常规教学方法,对学生吸引力不大,学生学习兴趣也不高,导致学习效果不好。为此,将任务驱动法引入课堂教学,通过制定合理可行的学习任务,使学生在完成学习任务的过程中掌握教学内容,并利用教学内容解决实际问题,从而调动学生的主观能动性,激发学习兴趣,取得了良好的教学效果。
现代控制理论;任务驱动法;教学改革
《现代控制理论》是在20世纪60年代发展起来的,是《自动控制理论》的后续课程,也是自动化专业的专业平台课,更是其他专业课程的基础。它的理论基础、研究方法对本科生的培养有着至关重要的作用。近年来,许多学校已把该课程作为本专业研究生入学考试的部分内容,因此《现代控制理论》无论是在本科教学,还是在考研领域都占有相当重要的地位。课程主要内容有控制系统的状态空间描述,状态方程的解,系统的能控性和能观测性,李雅普诺夫稳定性分析,状态反馈和状态观测器[1]。归纳起来可以分成三大部分,即建立系统的数学模型(状态空间表达式),系统分析(内部状态的运动分析、能控性分析和能观测性分析、稳定性分析)以及系统的设计。由于《现代控制理论》这门课程具有较强的理论性、枯燥的分析方法和繁琐的计算公式,让学生感到千头万绪,以为仅仅是数学问题,忽略了其工程实用价值。如何激发学生的学习兴趣,感受到本课程在解决工程问题上的作用,做到理论联系实际,是本课程改革的目的所在。笔者凭借多年的教学经验,在现代控制理论课程中应用任务驱动教学法,从数学模型的建立,到系统的定性分析和定量分析,最后到系统的设计,并用matlab仿真验证,环环相扣,使学生充分掌握本课程的教学内容,对所学知识能够做到前后有效衔接,改善课堂教学效果。
一、学习小组的划分
任务驱动教学法的特点是将教师为主体的灌输式教学转变为学生为主体的探究式学习[2],学生在学习过程中,必须紧跟教师的教学思路,积极思考,寻求解决任务的合理方案。采用任务驱动法教学,必须考虑学生实际情况,一个学生很难独立完成学习任务。所以根据专业总人数(110人),每十人一组,划分为11个小组。划分学习小组时,尽量考虑学生实际情况,每组都有一个班级干部作为组长,以便与其他同学沟通。同时还要考虑学生性别、成绩、特长等诸多因素。总之,组与组之间大体平衡。
二、教学任务的设计
任务驱动法教学模式成败的关键在于如何设计一个好的学习任务,该任务能够有效引导学生进入学习状态,产生学习兴趣,激发学习热情,主动投入到学习任务当中[3]。因此,教师在授课过程中,需要根据课程性质和知识点,针对授课对象制定合理可行的学习任务。该任务必须从基础知识开始,由浅入深,由易到难,循序渐进,逐步扩展,直至覆盖全部教学内容。设计任务时必须注意前后知识的衔接,既可以设计一个综合性任务,也可以将一个任务划分为若干个子任务,各子任务之间具有承上启下的关系,每个子任务包含教学基本知识点、重点和难点。学生在接到学习任务之后,明确学习目的,为完成学习任务开始积极探索,努力创新,通过个人思考,小组讨论,有效完成学习任务。笔者多年从事本课程的教学,积累了丰富的教学经验,对学生更是充分了解。下面设计的学习任务,内容全面、覆盖面广,各任务之间衔接得当,在连续几届学生当中取得了良好的教学效果。
任务一:数学模型的建立
已知系统的传递函数为
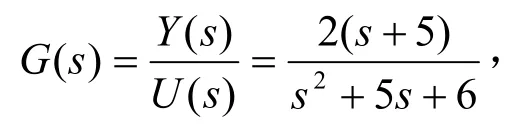
建立状态空间表达式。
此任务完成的是由传递函数建立状态空间表达式,采用的分解方法不同,得到的数学模型也不一样,所以必须全面考虑。
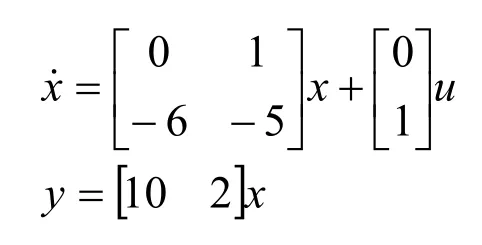
(1)直接分解。采用传递函数直接分解法,可得能控标准形的状态空间表达式
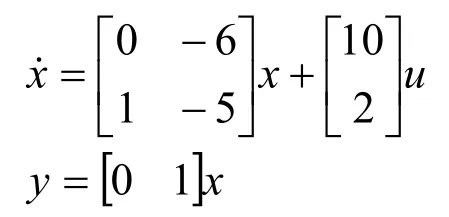
(2)对偶实现。能控标准形状态空间表达式的对偶实现可得能观测标准形
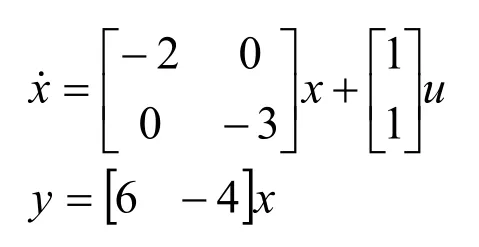
(3)并联分解。采用传递函数并联分解法,可得对角标准形的状态空间表达式
(4)由微分方程建立
拉氏反变换可得系统的微分方程为
建立状态空间表达式如下
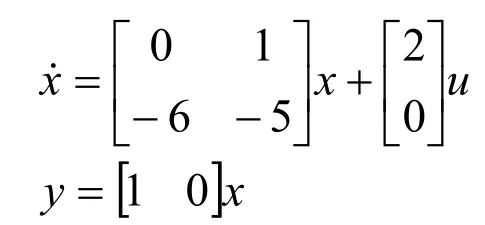
此状态方程为普通形。
通过这个任务的学习,使学生充分掌握状态空间表达式的建立方法。
同一系统,如果选择的状态变量不同,得到的状态空间表达式不同,所以状态变量的选择具有非唯一性。
任务二:系统分析
系统分析是本课程的第二大模块,主要包括系统运动状态分析、能控性分析、能观测性分析和稳定性分析。此处只对能控标准形进行分析。
(1)系统运动状态分析。
为了便于观察系统状态的变化情况,此任务可借助matlab完成,输入以下命令:
A=[0,1;-6,-5];B=[0;1];C=[10,2];D=[0];G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x)
可得系统状态的变化曲线如图1所示。
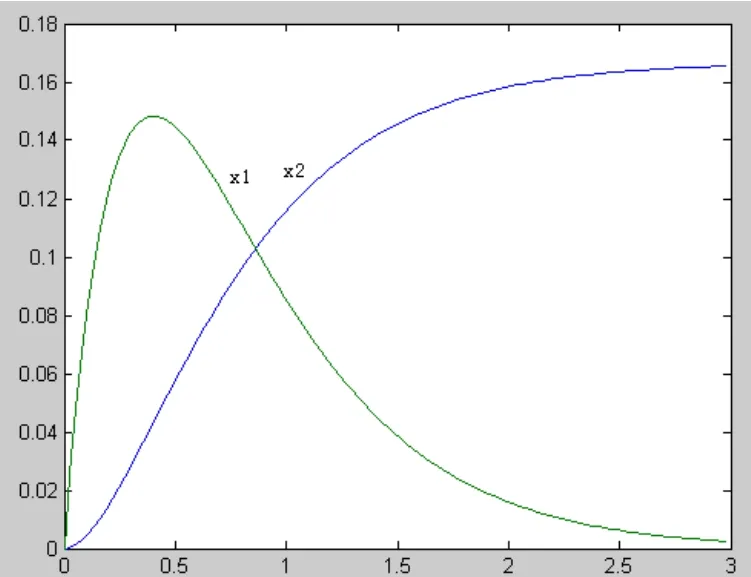
图1 状态变化曲线
(2)能控性、能观测性分析。
因为系统状态方程为能控标准形,所以一定是状态完全能控的。能观测性矩阵
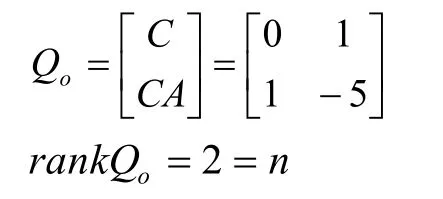
所以系统状态是完全能观测的。
(3)稳定性分析。
可得
因为P是正定的,所以系统是大范围渐近稳定。
通过任务二的学习,可以使学生将各部分内容衔接起来,掌握系统运动状态、能控性、能观测性以及稳定性的分析方法。
任务三:系统设计。
系统设计包括状态反馈极点配置和观测器的极点配置。仍以能控标准形为例,设计观测器,将极点配置在s1,2=-10±j10上。
在此基础上,设计状态反馈矩阵K,将闭环极点配置在s1,2=-5±j5上。
(1)观测器的极点配置
设观测器的反馈矩阵
则观测器的特征多项式为

期望特征多项式为

令
得观测器的反馈矩阵为
(2)状态反馈极点配置
设状态反馈矩阵
则状态反馈闭环系统的特征多项式为

期望特征多项式为

令
得状态反馈矩阵为
(3)matlab仿真验证
这里只给出状态反馈极点配置前后的仿真图和仿真结果,观测器的极点配置略。
状态反馈极点配置前的仿真图和仿真结果如图2和图3所示。
状态反馈极点配置前的仿真图和仿真结果如图4和图5所示。
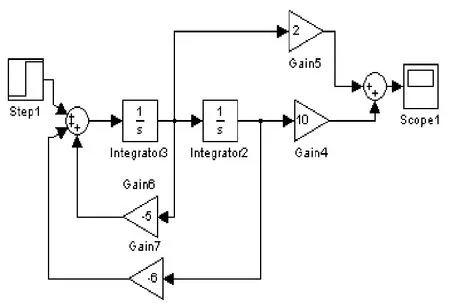
图2 状态反馈极点配置前的仿真图
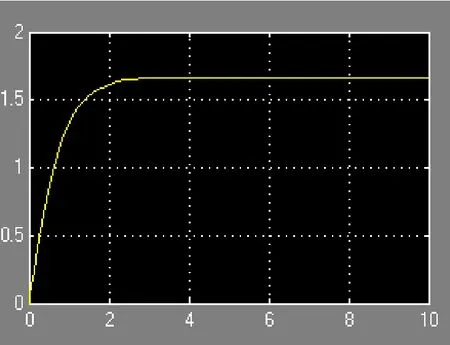
图3 状态反馈极点配置前的仿真结果
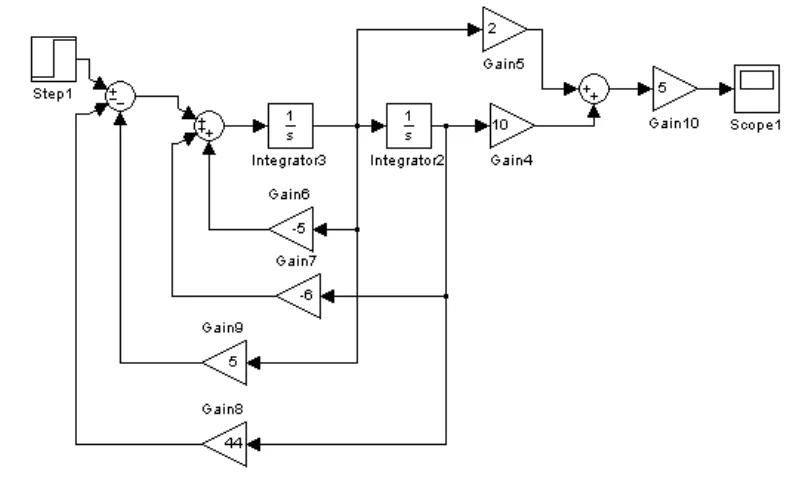
图4 状态反馈极点配置后的仿真图
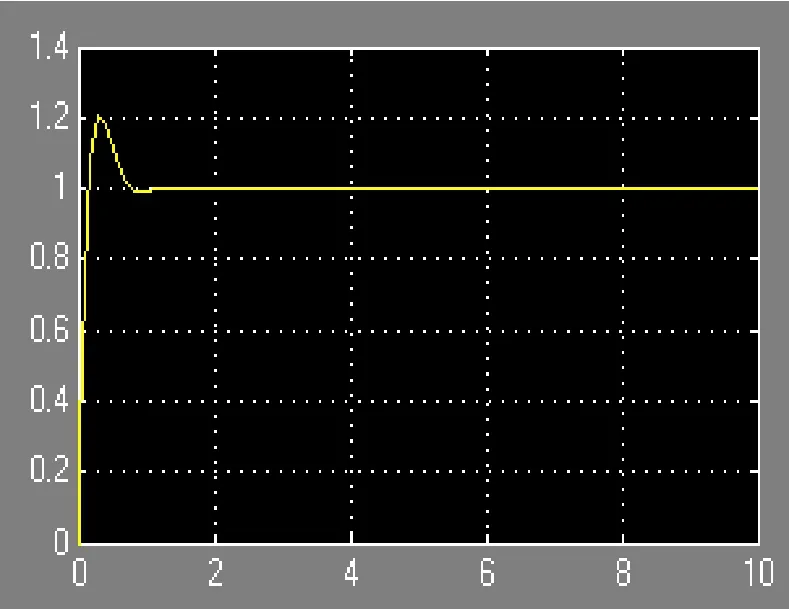
图5 状态反馈极点配置后的仿真结果
通过这个任务的学习,使学生掌握系统设计的方法,并利用matlab软件进行仿真,观察极点配置的作用,验证设计结果的正确性,加深对理论知识的理解,避免了纯理论学习的枯燥性和乏味性,激发了学习兴趣。
三、结束语
任务驱动教学法改变了传统的教学模式,学生是教学过程中的主体,而教师的任务则是辅助学生完成学习任务。要完成一个学习任务,学生必须集中精力,认真领会学习任务所覆盖的知识点,然后开始大量查阅参考书目,个人理解以及组间同学讨论等。在课堂上采用任务驱动教学法取得了以下几个方面的效果:
(1)教与学都是围绕一个具体任务进行的,比如数学模型的建立,教师引导学生模型建立的几种方法,学生则实际去完成,学生在教师的启发下轻松愉快地掌握学习内容。
(2)每次授课教师都要求学生完成一个具体的学习任务,因此在教师讲解过程中,学生不是被迫地接受,而是有目的、有意识地跟着教师的思路去思考。从而激发了学生的学习兴趣,调动学生学习积极性和主动性。
(3)教学任务的设计从数学模型的建立,到系统的定性分析和定量分析,再到系统设计,最后通过matlab验证设计结果的正确性,贯穿了课程的全部教学内容。学生通过完成学习任务,既掌握了教学内容,也能应用教学内容解决实际问题。
(4)教学任务设计完成后,不限定学生实现任务的方法和思路,只要合理可行即可,因此学生可以自由发挥,大胆创新。
[1]张嗣瀛, 高立群. 现代控制理论[M]. 北京:清华大学出版社, 2006:2-3.
[2]吴海江. 任务驱动法在可编程控制器技术教学中的应用研究[J]. 辽宁教育行政学院学报, 2010(4): 132-135.
[3]姜振安. “任务驱动”教学法与学生实践能力培养[J]. 职教通讯, 2003(7): 152-155.
G642.475
A
1674-327X (2017)05-0125-04
10.15916/j.issn1674-327x.2017.05.038
2017-03-30
王立红(1971-),女(满族),辽宁辽阳人,副教授。
(责任编校:付春玲)
