基于仿射不变算子的倾斜影像匹配算法评价
2017-10-17刘玉梅王仁礼任保刚
刘玉梅,王仁礼,任保刚
(1.山东科技大学 山东省基础地理信息与数字化技术重点实验室,山东 青岛 266590;2.珠海市测绘院,广东 珠海 519015)
0 引 言
近年来,随着全球信息化进程的加快,数字城市及智慧城市逐渐走进大众的视野,人们对三维建模的精度、视觉效果,以及现势性需求在不断提高,传统的竖直摄影已无法满足需求需要,倾斜摄影测量[1]技术便应运而生。但是,由于倾斜影像往往存在复杂的三维场景、几何畸变和辐射畸变等现象,致使传统空三中的自动选点与转点难以进行。因此,研究适用于倾斜影像的匹配算法,有助于提高倾斜影像空中三角测量的自动化进程。
国内外学者关于影像匹配算法[2]进行了大量的研究,并取得了较多成果,匹配方法、匹配策略及评价标准是当前研究的重点内容。目前影像匹配分为基于灰度的影像匹配和基于特征的影像匹配,基于灰度的影像匹配算法主要有Moravec算子[3]、Harris算子[4]等,这些算子主要适用于垂直摄影或近似垂直摄影,若直接用于多视角影像连接点的提取,在可靠性、精度和效率等方面都存在较大问题;基于特征的影像匹配算子主要有Harris-Laplacia和Harris-Affine算子[5-6]、SIFT算子[7-8]、SURF(Speeded Up Robust Features)算子(Bay等,2006)、CenSurE算子(Motilal Agrawal等,2008)、ASIFT算子(Yu G等,2009)、MSERs算子[9-10]等,这些算子主要是针对单一特征提取,后续还出现了多种特征相结合的匹配算法,一定程度上解决了场景部分遮挡、旋转缩放、视点变化等引起的图像变形等问题。
1 实验算法
本文主要介绍SIFT、Harris-Affine(简称H-A)及MSERs3种基于特征的匹配算子,其基本过程包含特征提取、特征描述和特征匹配。
1)特征提取:分别从参考影像和待匹配影像中提取SIFT、H-A及MSERs3种特征,SIFT提取算子先检测DOG尺度空间上的局部极值点,再通过该算子的经验阈值剔除低对比度点和边缘响应点实现精确定位;Harris-Affine算子首先利用多尺度Harris算子检测出初始角点,然后通过迭代不断调整初始特征点的位置、尺度及邻域形状,得到收敛后的仿射不变特征点;MSERs算子基于分水岭思想提取影像中灰度最稳定的局部区域特征。
2)特征描述:即生成特征描述子,也就是建立特征空间,以每个特征点为中心均匀地利用4×4共16个种子点进行描述,对每个种子点进行8个梯度方向的直方图统计,从而生成一个128维的SIFT特征描述子。
3)特征匹配:欧式距离主要用来衡量特征向量间的相似程度,是通过欧式空间距离或者最近邻距离与次近邻距离比率(最近邻距离比率)来实现的,是特征匹配中常用的方法。过程如下:
设参考影像I1中某个特征点A,对应特征向量DA;特征点A在待配准影像Ii中最近邻欧氏距离特征点B,次近邻欧氏距离特征点C,对应特征向量分别为DB和DC,当满足关系式(1):

则认为特征点A和B是一对同名特征点。其中,t为最近邻欧氏距离与次近邻欧氏距离比值的阈值参数,t取值越大,则匹配的要求越宽松,错误匹配点也越多;t取值越小,则匹配的要求越严格,错误匹配点也越少。
2 评价标准
本文使用均方根误差RMSE(单位:像素)、正确匹配率p和匹配时间t来评价图像匹配算子的性能。其中RMSE和p的定义如公式(2)和公式(3):

一般来说,均方根误差RMSE越小,匹配精度越高;正确匹配率p越高,匹配精度越高;匹配时间t越短,匹配效率越快。
3 实验结果与分析
3.1 数据源介绍
如图1所示,图(a)为垂直镜头拍摄,作为基准影像,图(b)为倾斜镜头拍摄,作为待匹配影像,(a)-(b)构成一组立体像对,立体像对间存在40°左右的视角变化。

图1 实验所用数据Fig.1 Experimental data
3.2 实验结果及分析
基于VS2010编程实现3种算法,分别对(a)-(b)立体像对影像数据进行特征点的提取和匹配实验,实验过程中各程序的阈值都是采用经验阈值。图2、图3和4图分别表示3种算子提取的特征点和匹配结果图,其中提取的特征点用黄色圆圈表示,正确匹配点对用红线连接。
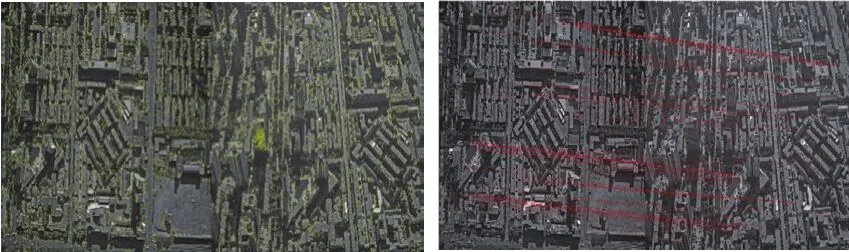
图2 SIFT特征提取和匹配结果图Fig.2 Feature extraction and matching results of SIFT operator

图3 H-A特征提取和匹配结果图Fig.3 Feature extraction and matching results of H-A operator
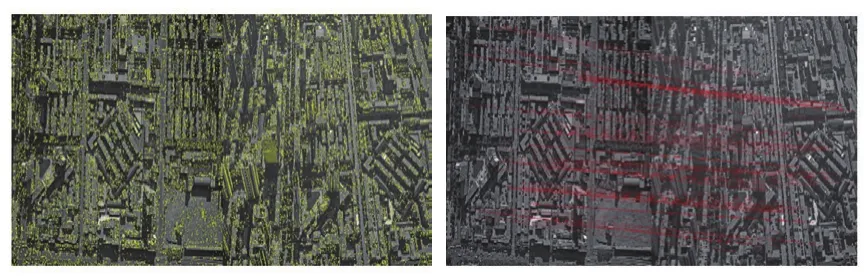
图4 MSERs特征提取和匹配结果图Fig.4 Feature extraction and matching results of MSERs operator
将匹配点保存为Envi识别的“.pts”格式,并导入Envi软件中,具体步骤:①分别打开参考影像和待配准影像,点击“File-Open Image File”;②导入同名点坐标,按照“Map-Registration-Select GCPs:Image to Image”过程选择基准影像和待配准影像,然后点击“File-Restore GCPs from ASCII”导入“.pts”同名点文件,对左右立体像对匹配的同名点进行点对点检查,查看同名点位置是否正确,结果见表1。

表1 3种经典算子匹配结果分析表Tab.1 The matching results of three classic operators
由图2、图3及图4可以看出,基于影像(a)-(b),3种算子提取的特征点数目存在较大差异,分布情况也不尽相同。Harris-Affine算子提取的特征点及正确匹配的同名点相对较多,而且分布也比较均匀;而SIFT和MSER算子提取的特征点数目则相对较少,分布情况也比较分散。
本文是以匹配时间t、正确匹配率p和均方根误差RMSE作为评价3种算子匹配性能的标准,对比分析结果见表1。从表1可以很直观地看出每种算子的匹配结果统计值,进而可以得出如下的比较:①RMSE:Harris-Affine<MSERs<SIFT;②p:SIFT<Harris-Affine<MSERs;③t:Harris-Affine<SIFT<MSERs。因此,从正确匹配率的角度而言,Harris-Affine和MSERs算子的性能明显优于SIFT算子,即当立体像对存在较大的视角变化时,Harris-Affine和MSERs算子具有更强的鲁棒性。而在Harris-Affine和MSERs算子正确匹配率比较接近的情况下,Harris-Affine算子的匹配点数为379,明显多于MSERs算子,而且Harris-Affine算子的匹配效率相对较高,均方根误差相对较低,说明了Harris-Affine算子在特征检测数量方面优于MSERs算子,即Harris-Affine算子更适合于初始匹配。
综上可知,当立体像对存在较大的视角变化时,Harris-Affine和MSERs算子的适应性优于SIFT算子;而在特征检测数量方面,Harris-Affine算子明显优于MSERs算子。
4 结束语
本文针对郑州某地区的两幅航空影像数据,设计了SIFT、Harris-Affine及MSERs3种特征提取算子,为了更好地对比分析其匹配性能,均采用相同的匹配策略、匹配方法及评价标准,发现Harris-Affine、MSERs算子的正确匹配率相对较高、适应性较强,而考虑到匹配效率及特征点提取数量的要求,Harris-Affine算子性能则更理想。
