基于旋转森林的Landsat-8影像森林植被分类1)
2017-09-03梁晰雯赵颖慧甄贞魏庆彬
梁晰雯 赵颖慧 甄贞 魏庆彬
(东北林业大学,哈尔滨,150040)
基于旋转森林的Landsat-8影像森林植被分类1)
梁晰雯 赵颖慧 甄贞 魏庆彬
(东北林业大学,哈尔滨,150040)
以黑龙江大兴安岭塔河林业局瓦拉干林场2013年的Landsat8 OLI影像为数据源,在光谱特征基础上,增加归一化植被指数、纹理特征和地形特征,得到3种特征组合(光谱特征和NDVI (F1);光谱特征、NDVI和纹理特征结合(F2);光谱特征、NDVI、纹理特征和地形特征结合(F3)),将旋转森林算法分别应用于3种特征组合下的森林植被分类,获得分类精度最高的特征组合;之后利用最佳特征组合将旋转森林与最大似然分类法和支持矢量机2种分类方法进行对比和精度验证分析。结果表明:利用旋转森林算法并结合光谱特征、NDVI、纹理特征和地形特征的特征组合分类精度最高,为87.54%,比F1和F2特征组合的精度分别提高了11.08%和3.39%。比较不同分类方法,旋转森林算法进行森林植被的分类精度比最大似然法和支持矢量机方法的分类精度分别提高了13.24%和5.39%。由于旋转森林算法稳定性好,在植被分类中受山地阴影的影响较少,因此在分类图中“椒盐”现象最少,图像更加清晰,分类效果最好。
Landsat-8;旋转森林;森林植被分类;主成分分析
//Journal of Northeast Forestry University,2017,45(8):39-48.
Based on Landsat 8 OLI imageries of Walagan forest farm, Daxing’an Mountains, Heilongjiang Province in 2013, we added NDVI (Normalized Difference Vegetation Index), textural features and topological features to spectral bands, combined them as three feature groups (F1: OLI bands and NDVI; F2: OLI bands, NDVI and texture features; F3: OLI bands, NDVI, texture and topographic features), and implemented forest vegetation classification using Rotation Forest (RoF). With the optimal feature group, RoF was compared with MLC (Maximum Likelihood Classifier) and SVM (Support Vector Machine). F3 feature group yielded the highest classification accuracy using RoF, that is, 87.54%, higher than F1 and F2 group by 11.08% and 3.39%, respectively. Comparing different classification methods, RoF yielded higher classification accuracy than MLC and SVM by 13.24% and 5.39%, respectively. Due to the good stability of RoF, hill shadow had little influence on forest vegetation classification, thus, RoF could provide the best classification map with highest accuracy and least “pepper and salt” effect among the three classification methods.
森林植被是构成森林资源的主体,准确地识别森林植被是研究和利用森林资源的基础和依据[1]。随着遥感技术的发展,森林植被的信息能够实现大面积、实时、动态地获取[2]。但是,由于林区特殊的地理环境和生物分布特点,森林植被普遍存在“同物异谱”和“异谱同物”的现象,使其分类问题成为研究难点。近年来,许多分类方法用于植被分类中,例如:(1)人工神经网络(Artificial Neural Networks,ANNs)[3-4];(2)决策树分类[5-6];(3)支持矢量机分类[7-5];(4)随机森林和Adaboost算法[9];(5)线性判别分析[10-11];(6)光谱角度匹配[12];(7)回归树分类器[13];(8)最大似然法[13]并与其他一些分类方法(或算法)进行比较分析的研究。例如,Pu et al.[13]、Cho et al.[14]、Peerbhay et al.[15]、Deng et al.[16]和Ghosh et al.[17]以WorldView-2(或结合IKONOS、Quickbird、LiDAR)数据进行植被分类,研究表明,支持矢量机法、随机森林算法和回归树分类器等方法表现优异。最大似然法分类精度极低,在高维、多源数据分类中能力有限,但其计算速度快、实施方便,还是被广泛应用于影像分类[18]。虽然分类方法种类很多,但是至今还没有一种算法适用于不同地区的多种林分,而且,现今获取的数据量越来越大,数据类型也趋于复杂,因此,对分类精度和算法稳定性的要求越来越高,传统的这些分类方法都属于单一的分类系统,当先验知识不充分时,除非进行大量的实验,否则很难确定最优的分类器[19]。
Suen于1990年提出了集成多分类器的概念,为分类领域开辟出了新的道路[20]近年来,使用分类器集成来提高分类精度已成为一个重要研究方向,在遥感影像分类中具有广阔的应用前景。旋转森林是Rodriguez et al.[21]在近期提出的一种新的集成算法,旋转森林分类算法的特点是基于特征变换,对属性集的分割,不仅增大了基分类器的差异性,还具有适用高维数小样本数据,不容易过拟合等优点,分类精度较高.国内外对旋转森林算法也在不断改进和完善。毛莎莎等[22]提出了一种使用旋转森林策略集成2种不同模型分类器的方法,即异构多分类器集成学习算法,该方法既缩短了运行时间,又同时提高了分类精度,达到了较好的集成效果。刘敏[23]提出了基于旋转森林和协同训练算法,用未标记的数据提高基分类器之间的差异性,提高集成效果。陈金瓯[24]将旋转森林算法应用在DNA微阵列数据分类的研究上,并通过实验证明了算法的参数只受线性变换方式和集成规模的影响,基分类器的选择以及是否剪枝对结果的影响不大,说明该算法的稳定性较强。Du et al.[25]将旋转森林算法应用于全极化遥感影像分类研究,对植被、居民地、水体的总体分类精度达到86.73%。
Landsat系列卫星数据为全球的资源环境提供连续的观测数据长达40年之久,2013年NASA在美国加州成功发射了Landsat 8卫星,在光谱分辨率有很大的改进[26]。为了有效的利用Landsat 8的影像信息,本研究以黑龙江大兴安岭塔河林业局瓦拉干林场2013年9月的Landsat 8影像为数据源,利用旋转森林分类算法对研究区的森林植被类型进行分类,并和最大似然分类法(MLC)、支持矢量机分类法(SVM)进行精度对比分析,以期将旋转森林算法应用于Landsat 8遥感影像的分类,获取高精度的森林植被类型分布图。
1 研究区概况
黑龙江大兴安岭塔河林业局瓦拉干林场位于大兴安岭北部的塔河县中部,地理位置123°13′~125°7′E、52°33′~53°4′N(见图1)。南与绣峰林场相连,西与盘古镇接壤,东连十八站林业局,北与开库乡为邻。瓦拉干全境为典型的山地地带,土壤为棕色针叶林土,属第六积温带,昼夜温差大。瓦拉干林场海拔700 m,面积199 068 hm2。有林地面积154 822 hm2,森林蓄积量9 340 984 m3。瓦拉干镇物产资源丰富,矿产资源有金矿和煤矿;动物资源有棕熊、马鹿等50多种;森林资源有落叶松(Larixgmelinii(Rupr.) Kuzen)、樟子松(Pinussylvestrisvar.mongolicaLitv.)、白桦(BetulaplatyphyllaSuk)、云杉(Piceakoraiensis)等树种。

a.大兴安岭地区 b.塔河林业局 c.瓦拉干林场
图1 研究区位置
2 试验数据
遥感数据:本研究从地理空间数据云网站(http://www.gscloud.cn/)下载Landsat-8影像数据,成像时间为2013年9月3日,图像云量为2%。发布的数据产品为L1T级,即已经进行了几何校正的图像。将下载后的Landsat8影像直接在ENVI5.1软件中进行了UTM-WGS84投影,先后进行辐射定标、大气校正、全色波段与多波段图像融合,以及通过塔河林业局瓦拉干林场矢量边界进行裁剪,波段组合等处理,最终得到Landsat 8 OLI 5、4、3波段假彩色影像。
辅助数据:选取瓦拉干边界矢量数据;由美国太空总署(NASA)和国防部国家测绘局(NIMA)联合测量的SRTM3数据,分辨率为90 m;塔河林业局1997年的森林资源二类调查数据,调查内容包括各类林地的面积、权属、森林覆盖率、林木蓄积等;以及依照不同的林分类型、不同立地条件选取2010年的森林资源清查固定样地复测数据(样地面积为0.06 hm2)11块(如图2所示),样地林分类型包括落叶松林、针叶混交林、针阔混交林等。最终以森林资源二类调查数据和固定样地数据为辅助确定林分类型,建立本研究的分类系统。
3 研究方法
3.1 遥感影像特征分析
遥感影像各波段相关性:由表1可知,各波段间相关性非常高,尤其是波段1、波段2和波段3,相关系数达到0.97以上,波段6和波段7的相关系数达到0.99,说明两个红外波段在光谱信息上具有很强的一致性。由于各波段相关系数都超过0.95,因此,本研究在图像信息提取和分析时进行了主成分分析(PCA),以降低波段自相关性,更好地利用波段中的有效信息。

图2 瓦拉干林场5、4、3波段假彩色融合影像及固定样地位置
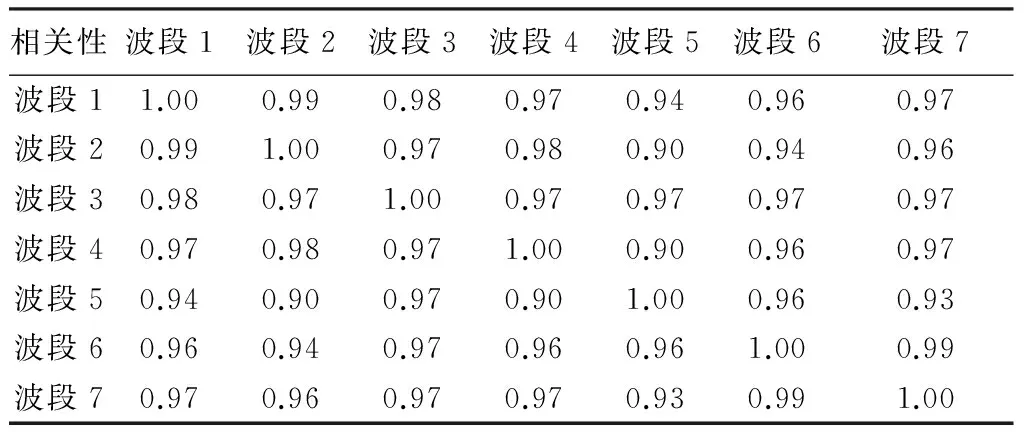
表1 各波段间相关系数矩阵
地物可分性分析:将选取的训练样本,通过遥感图片处理软件(ENVI)的n-D mean 进行统计分析,得到地物光谱反射曲线(图3)。通过该光谱曲线,道路和居民地亮度值高,其次是灌草地,待分类地物在各个波段均能清晰的分辨出。而在有林地中的植被分类,可分性较低。所以在地物分类有植被的时候,只借助于光谱特征是远远不够的,还要融入纹理特征、地形特征等其他特征。

图3 不同地物的光谱反射曲线
3.2 特征提取与特征组合
对于旋转森林分类而言,不同特征变量参与遥感影像分类在一定程度上可减少地物同物异谱、异物同谱的影响,有效提高遥感影像分类精度。同时,旋转森林算法要对特征维数进行分割,特征维数过少,不利于分割;特征维数过多,就会导致数据冗余,且分类结果未必好,因此,选择合适的特征,对分类精度至关重要[26-28]。
3.2.1 特征提取
纹理特征提取:由于波段较多,且多光谱数据波段间高度相关,若对每个波段都提取纹理特征图像,并参与分类,会产生大量数据,计算量大,信息过剩,甚至会影响分类精度[29]。所以,提取纹理特征之前先对影像进行主成分分析。主成分分析通过坐标轴旋转来增大方差,生成互不相关的波段,从而达到隔离噪声,减少数据维数的目的。主成分分析结果见表2,从表可看出,前3个主成分分量累计方差贡献率达到了99.95%,几乎集中了所有波段的信息。

表2 主成分分析统计
遥感影像大多为随机纹理,服从统计分布,所以常采用灰度共生矩阵的方法来提取纹理特征。Haralick于1973年首先提出灰度共生矩阵,灰度共生矩阵是通过对影像灰度级之间二阶联合条件概率密度的计算得到的矩阵[30],用来描述各像元灰度的空间分布(方向、相邻间隔)和结构特征(排列规则)。通过ENVI的Co-occurrence Measures工具可以提取8个常用的纹理测度,包括:均值、方差、协同性、对比度、非相似性、熵值、二阶矩、相关性,这些纹理测度可划分为4大类:基于信息理论的特征;基于统计特性的特征;基于线性关系的特征、表达清晰度的特征。通过研究,最终设定窗口大小为5×5,移动步长为1个像元,取45°方向,灰度量化级别为64 bit的前提下,将第一主成分进行灰度共生矩阵计算,得到如图4的8幅影像。8个纹理特征影像皆截取为瓦拉干林场的同一区域。
8个纹理测度并不都适合于参与分类,应从变量本质特点、图像灰度值标准差大小、图像纹理特征是否明显三方面选择纹理测度。变量同质性、对比度、非相似性的特点相似,均用来描述图像纹理不同区域的局部灰度变化,可以代表图像的清晰度。从图4上分析,只能看出非相似性的纹理特征不清晰,如图4(e),但是无法辨别同质性和对比度,如图4(c)和(d),通过对比二者的标准差(见表3),可以选择对比度参与分类。对于具有统计特征的3个特征变量,虽然二阶矩的标准差较小,但是从图4(g)上来看,很明显二阶矩的信息量更大一些,均值和方差的纹理特征不清晰,如图4(a)和(b)所示,不利于植被的区分,且二阶矩又称为能量,是灰度共生矩阵元素值的平方和,可以反映图像灰度分布均匀程度和纹理粗细度;相关性和熵的标准差虽然不高,但是相关性反映的是矩阵行列的相关度,熵反映的是纹理的随机性和复杂性。通过分析,最终选择相关性、熵、对比度、二阶矩4个纹理特征来分别描述纹理的相关度、复杂性、清晰度、均匀性等特征,参与分类。
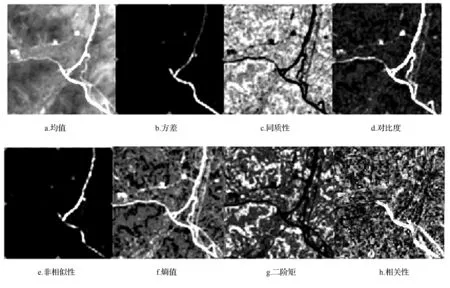
图4 由第一主成分提取的8种纹理特征图像
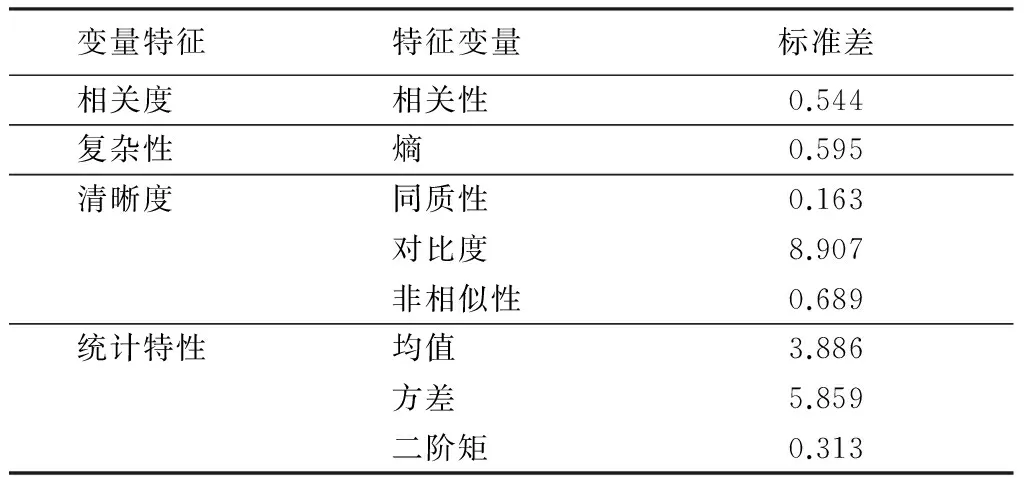
变量特征特征变量标准差相关度相关性0.544复杂性熵0.595清晰度同质性0.163对比度8.907非相似性0.689统计特性均值3.886方差5.859二阶矩0.313
归一化植被指数的提取:在遥感领域,植被指数应用广泛。主要用来定性和定量评价植被覆盖和生长状况。遥感影像波段间的比值运算可以消除部分地形的影响。植被指数模型有几十种,本研究主要选择归一化植被指数(IN,D,V)来作为特征变量之一。归一化植被指数的特点是消除综合影响因子,增强对植被的反应能力,对区分植被和非植被地有很大的帮助。基于Landsat 8 OLI的归一化植被指数运算公式如下[31]:
IN,D,V=(RN,I-R)/(RN,I+R)。
式中:RN,I表示近红外波段反射值;R表示红外波段反射值。
地形特征提取:地形的空间分布特征也对分类结果有影响[32]。描述地形的因素有海拔、坡度和坡向。坡度是指过地表面任一点的切平面与水平面的夹角,表示地表面在该点的倾斜程度;坡向为地表面上任一点的切平面的法线矢量在水平面的投影与过该点的正北方向的夹角;高程为地面上任一点的海拔高度。在低平地区及阳坡,阔叶林、居民地、道路分布较多;在海拔高的地区及阴坡,针叶林分布较广泛。本研究区域多是山地,受地形影响较大。因此,本研究引入动力效应模型数据,通过遥感图片处理软件派生出坡度、坡向作为遥感分类的特征变量。
3.2.2 特征组合
本研究将不同特征组合下的分类结果进行对比分析,特征组合方式如下。
F1:光谱特征和归一化植被指数的8个变量(如表4所示的序号1~8)。
F2:光谱特征、归一化植被指数和纹理特征结合20个变量(如表4所示的序号1~20)。
F3:光谱特征、归一化植被指数、纹理特征和地形特征结合23个变量(如表4所示的序号1~23)。
通过遥感图片处理软件图层叠加工具,将各特征变量叠加到一起,分别形成特征集F1、F2和F3。
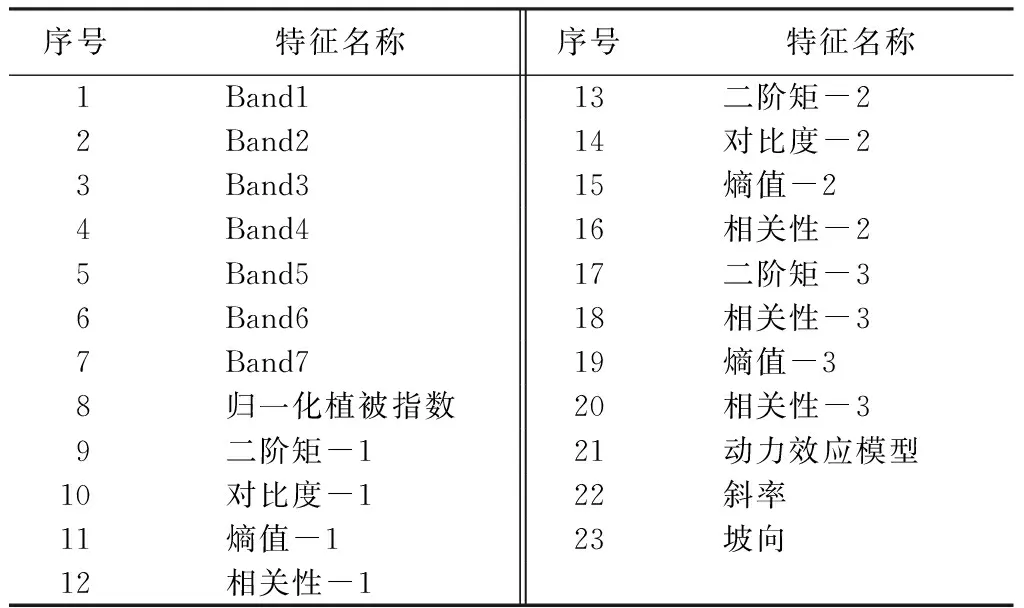
表4 特征序号及其对应的特征名称
3.3 确定分类系统
根据《土地利用现状分类》[33]国家标准分类体系并结合瓦拉干林场内二类调查森林植被类型的数据,将瓦拉干林场土地利用类型划分为二个一级分类体系,即植被区和非植被区。其中,非植被区包括道路、居民地。植被区的二级体系包括灌草地和林地。林地按照树种组成可分成针叶纯林、阔叶混交林、阔叶纯林、针阔混交林、针叶混交林等类型。但根据瓦拉干林场固定样地数据显示,阔叶纯林为白桦,块数只有一块,其余为白桦和其他阔叶树的混交林,故将阔叶纯林和阔叶混交林归为一类,即阔叶林。因此,本研究最终将分类系统确定为阔叶林、针叶纯林、针阔混交林、针叶混交林、灌草地、道路、居民地共7类。
3.4 采集训练样本
本研究以瓦拉干林场二类调查林相图和固定样地数据为基础图,通过目视判读在Landsat 8 OLI 543波段标准假彩色合成影像上,按照阔叶林、针叶纯林、针阔混交林、针叶混交林、居民地、道路、灌草地7个类别人机交互的分层随机选取训练区。最终确定样本共3250个样本点,居民地面积较小,所以只选取250个样本点,其余6类各选取500个样本点。所有3 250个样本点中80%(共计2 600个样本点)为训练样本,20%(共计650个)为测试样本。
3.5 分类方法
旋转森林算法:是基于特征变换的算法,首先将样本的特征集随机分割,再将得到的特征子集进行特征变换,重新组合获得新的样本,然后再参与基分类器的分类。这样通过对数据的预处理,增大基分类器间的差异性,用以提高分类精度[21-23]。
本研究通过MATLAB软件和遥感图片处理软件平台实现旋转森林算法在遥感图像分类中的应用。通过遥感图片处理软件平台将二类调查数据矢量图、固定样地数据和遥感图像叠加,分层选取训练样本的感兴趣区域,将采取到的样本点输出成ASCII码的格式,最后输入到MATLAB中。然后将遥感图像存为TIFF格式,作为matlab的待分类矩阵数据。矩阵数据是三维的,不能直接输入到算法里,必须先将其变为二维数据,即(像元数量×特征变量)的形式。且要将灰度值转换成双精度格式并归一化到[0,1]。最后按照下述的旋转森林分类方法步骤构建分类器模型,并对遥感影像进行分类,最终将分类结果用RGB显示。
假设X为初始训练数据集(N×n维),N为训练数据的样本个数,n为选取的分类特征个数;Y表示训练样本集X中对应的样本类标(N×1维);F表示特征集;K表示划分的特征子集个数;D1,D2,…,DL表示L个基分类器,{ω1,ω2,Λ,ωc}为类标集合。支持矢量机法在解决高维小样本非线性问题中有许多优势,在分类和回归问题中,取得了巨大成功[34],所以本研究选择支持矢量机法作为基分类器。旋转森林模型构建步骤如下:
(1)将特征集F随机划分为K个子集Fj(j=1,2,…,K),则每个子属性集包含约M=n/K个特征,如果特征数不能整除,则将剩余特征加入最后一组特征中。

(2)重复步骤2,将得到的K组主成分系数存入一个系数矩阵Ri中:


其中,L为基分类器个数,c为类别个数。样本x归属为最大可信度所属类别。
旋转森林参数的设置。影响旋转森林分类精度的主要参数有2个:一个是特征子集划分数K,另一个是集成基分类器(SVM)的个数L,即集成规模。R为重采样时的比率,一般对分类精度无影响[25]。
通过Matlab软件,设置L=6,R=10、20、…、100,得到结果如图5所示,通过图5分析,在集成规模不变的情况下,各特征集中,总体精度随着K的增加而增加,到一定程度趋于稳定,最后随着K继续增加,呈现下降趋势。要想达到较好的精度,在只有8个特征变量的F1集合中,K需要划分到5,如图5所示;而在20个特征变量F2特征组合和23个特征变量F3特征组合中,K需要划分到13。3种特征组合中,F3特征组合融合了光谱特征、归一化植被
指数、纹理特征和地形特征的精度最高。无论哪种特征组合,数据重采样比率(R)无明显变化,所以依照惯例,令R=0.75即可[35]。

图5 旋转森林总体精度随参数(特征子集数K)变化结果
集成规模L是影响旋转森林分类精度的另一个重要的参数。首先令初值等于5,每次增加5个值,一直到50,即L=5、10、15、…、50,通过MATLAB计算,得到旋转森林总体精度随参数(集成规模数L)变化结果如表5所示。通过表5可以看出,总体精度在集成规模L为10以内就可以达到很好的精度,随着集成规模的增加,总体精度趋于平稳。3种特征集合下,依然是在光谱特征下,结合归一化植被指数、纹理和地形特征的集合分类精度较好。

表5 旋转森林总体精度随参数(集成规模L)变化结果
最大似然分类法是最经典的分类算法之一,是建立在贝叶斯准则基础上分类错误概率最小的一种非线性监督分类方法。它的分类思路是求出像元数据相对于各类别的似然度,然后把像元分到似然度最大的类中去[18,36]。
支持矢量机是在特征空间上的间隔最大的线性分类器。其算法是通过寻求结构化风险最小来提高学习机的泛化能力,实现经验风险和置信范围的最小化,从而利用少量样本也能得到高效、稳定、准确的分类效果[37-38]。
女助手说:“我真没有发现有什么不对的地方,以前的警察也来过几次,我都这么说,毛老师是一个很严谨的人,也很守信的,他失踪前一天还答应对我的论文进行指导的,可是他那天晚上下班后就没有再回来了,我还帮他草拟了接下来一个星期的日程安排,他还亲自提笔改了几处的。”
4 结果与分析
本研究从两方面进行比较分析,一是比较不同特征组合变量下,采用旋转森林进行分类的结果及精度评价;二是在统一特征变量下,不同分类方法,即最大似然法、支持矢量机法和旋转森林法的分类结果及精度评价。
4.1 不同特征组合下旋转森林分类
采用3种特征组合(F1、F2、F3)进行旋转森林分类,其分类结果如图6和表6所示。

表6 基于旋转森林算法的不同特征集分类精度评价结果
注:Ⅰ.阔叶林;Ⅱ.针叶纯林;Ⅲ.针阔混交林;Ⅳ.针叶混交林;Ⅴ.灌草地;Ⅵ.居民地;Ⅶ.道路。

图6 基于旋转森林算法的不同特征集分类结果图
从表6可以看出,不同特征集下的旋转森林分类结果区别很大,分类精度,F1为76.46%,F2为84.15%,F3为87.54%;Kappa系数,F1为0.72,F2为0.81,F3为0.85。结合了光谱特征、NDVI、纹理特征和地形特征的F3,比基于光谱特征和归一化植被指数的F1和基于光谱特征、NDVI和纹理特征的F2精度提高了11.08%和3.39%;Kappa系数分别提高了0.13和0.04。
结合图6和表6分析可知,植被与非植被之间得到很好的区分,但是林地之间区分能力较弱。只基于归一化植被指数和光谱特征(F1)的阔叶林、针阔混交林、针叶混交林之间发生混分现象,其中阔叶林和针阔混交林分类精度较低分别只有70%和68%。融合了归一化植被指数、纹理特征之后(F2),各种林分类型的精度都有明显提高,其中阔叶林精度提高的最多,增加了18%,原因可能是阔叶林和一些混交林光谱信息、生长的海拔高度相近,且针叶林类的形态结构比阔叶林更规则,均质性较好,而阔叶林的异质性要高于针叶林,需要借助其他纹理特征才能将阔叶林类型有效的分出。F1和F2没有融合地形特征,研究区受山区地形的影响,易产生阴影区域,在阴影区域,针叶纯林与针叶混交林光谱信息和纹理特征相近,易发生混分现象。融合地形特征之后,针叶纯林和针叶混交林的精度有所提高,混分现象减少,且各林型的空间分布规律更加清晰,瓦拉干林场地势西南高,东北低,所以,针叶林类大多数集中分布于西南部,而阔叶林则在东北部较多。利用F3特征集后,各个类别都得到了较好的区分,对比各图可看出(图6),分类界限清晰,碎斑现像大幅度减少,分类精度高,分类效果更贴合实际。
4.2 不同分类方法下的分类结果
在对研究区进行旋转森林算法(RoF)分类外,还进行了基于传统的分类方法中的最大似然分类法(MLC)和支持矢量机(SVM)的分类,由旋转森林中F3特征集分类效果最好,所以,对于不同的分类方法均采用F3组合特征,分类精度评价如表7。从表7可知,利用F3特征集的最大似然法、支持矢量机、旋转森林3种方法的分类精度分别为74.3%,82.15%,87.54%,Kappa系数分别为0.69,0.79,0.85。旋转森林与最大似然法和支持矢量机相比,分类精度最高。由分类结果图8可以看出,最大似然法产生的“椒盐”现象明显,很多“阔叶林”和“针阔混交林”被错分。支持矢量机算法的分类图中“椒盐”得到明显缓解。由于旋转森林算法具有集成学习的优势,且在植被分类中受地形的影响较少,因此在分类图中“椒盐”现象最少,图像更加清晰,分类效果最好。
最大似然法分类精度较低只有74.3%,分类效果较混乱。因为受山区地形影响较严重,阴影较多,存在严重的“椒盐噪声”现象,图像较破碎。很多灌草地都被错分为居民地、道路,与实际不符。在针叶纯林、针叶混交林、针阔混交林之间,混分现象严重,原因可能因为都是混交林,在纹理和光谱特征上都很相似,而最大似然法需要假设训练样本的光谱特征成正态分布,不适合离散的、复杂的样本;支持矢量机的分类精度要比最大似然法高,总体精度达到82.15%,较最大似然法提高了7.85%,分类效果有所改善,错分和漏分现象也有减少。旋转森林算法比最大似然法和支持矢量机方法总体分类精度提高了13.24%、5.39%;Kappa系数分别提高了0.16、0.06。从旋转森林算法的图像中(图7),可以看出针阔混交林以及道路被很好的提取出来,各类都得到了较好的区分。大大减少了针叶纯林、针叶混交林、针阔混交林之间的错分、漏分现象。

表7 利用F3特征集的不同分类器分类精度评价结果
注:Ⅰ.阔叶林;Ⅱ.针叶纯林;Ⅲ.针阔混交林; Ⅳ.针叶混交林; Ⅴ.灌草地;Ⅵ.居民地; Ⅶ.道路。
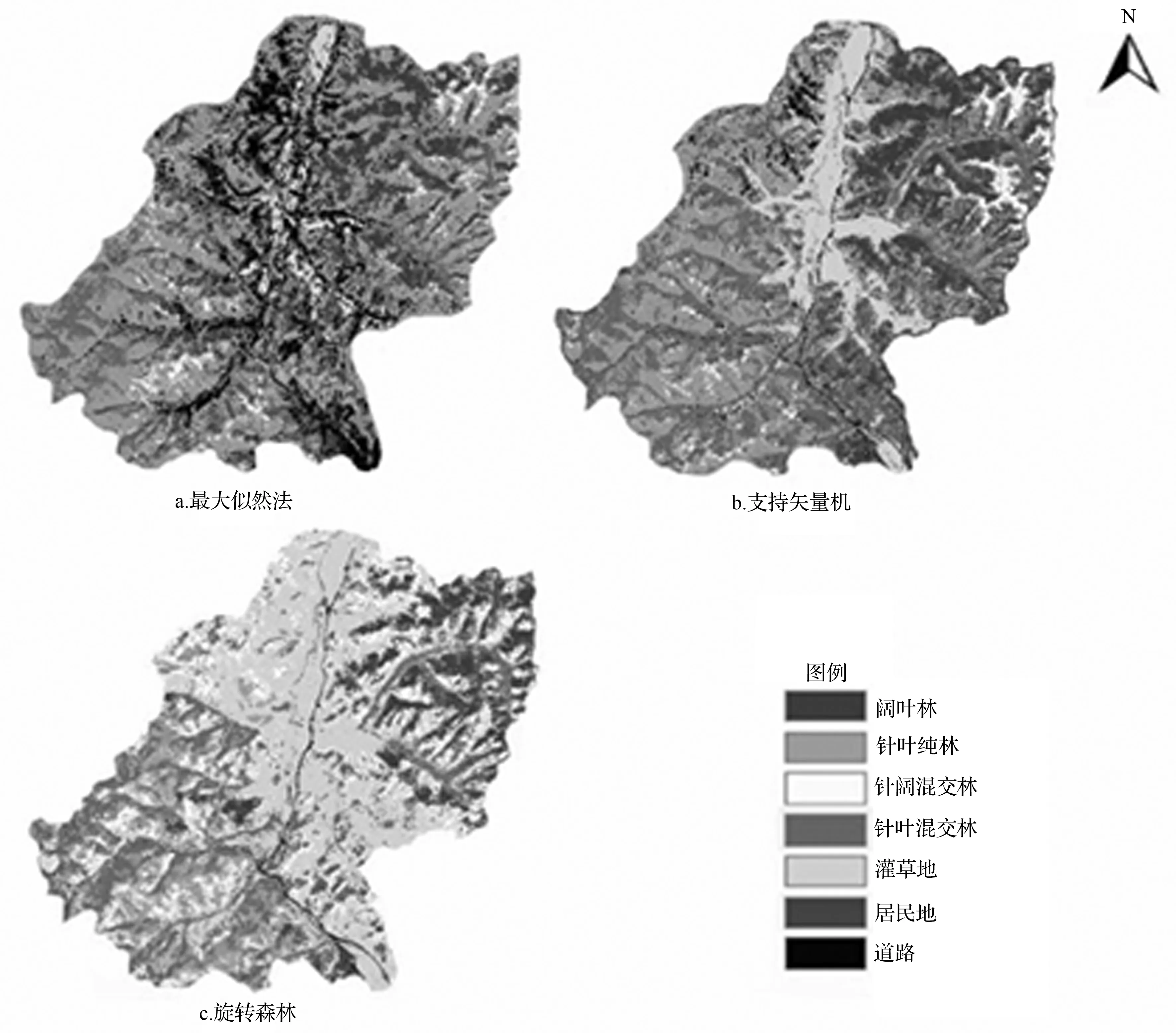
图7 利用F3特征集的不同分类方法的分类结果图
5 结论与讨论
本研究以黑龙江省塔河林业局瓦拉干林场为研究区域,以Landsat 8 OLI遥感图像为数据源,结合森林调查数据、DEM数据,采用不同特征组合的方式以旋转森林算法对研究区域进行森林植被分类,并进行不同特征组合(F1:光谱特征和归一化植被指数;F2:光谱特征、NDVI和纹理特征;F3:光谱特征、归一化植被指数、纹理特征和地形特征)和不同分类算法的对比分析,研究不同特征组合和分类算法对森林植被分类的影响。研究表明,将旋转森林算法应用于Landsat 8 OLI图像进行植被分类是可行的。旋转森林算法,巧妙利用了特征划分、变换增大了分类器的差异,基于F1、F2和F3的特征组合下旋转森林的分类精度分别达到了76.46%、84.15%和87.54%。显然,综合了多特征变量的分类,减少了"同物异谱,同谱异物"的问题,分类精度明显提高。在相同特征(F3)下,与最大似然法和支持矢量机方法相比,旋转森林方法的分类精度分别提高了13.24%和5.39%。多光谱各波段之间相关系数较高,进行主成分分析,提取波段最大信息量后,再提取特征变量,能够突出植被特征,使得地物之间的可分性提升并能够剔除无用的特征,避免数据的冗余。对瓦拉干林场的森林植被类型划分中,旋转森林对于非植被的分类精度较好;植被区中,尤其是混交林之间,依然有错分、混分现象,通常需要借助纹理、地形等辅助特征,才能更好的区分林型。但是与最大似然法和支持矢量机分类方法相比,由于旋转森林算法稳定性好,在植被分类中受山地阴影的影响较少,因此在分类图中"椒盐"现象最少,图像更加清晰,分类效果最好,且植被空间分布规律更明显。传统的监督分类方法由于受分辨率、地形、算法的局限性等影响,分类精度低,图像碎斑较多,不能有效的区分植被类型。
从国内外学者对旋转森林算法分类研究来看,刘帅等[39]针对高分辨率遥感图像,提出了一种多特征融合的分类方法,总体平均分类精度提高了10%,这与本研究达到的效果相符合。张颖等[40]对Landsat 8影像进行了主成分分析,使得森林植被得到了更好的提取,分类精度达到84.7%,而本研究对影像进行了主成分分析后,明显增强了影像纹理信息,改善了分类精度,最高分类精度达到87.54%。Du[25]将旋转森林算法应用于全极化遥感分类中,在多特征变量下,对植被、居民地、水体的分类精度达到86.73%,与本研究分类精度相似。
虽然较传统分类方法,旋转森林分类精度较高,错分现象大大减少,但是受“同谱”现象的影响,对森林植被类型的划分还有很大的提升空间。有研究表明[22],结合不同模型的分类器能够增加差异性,改善分类器集成性能。如何能既增大差异性又避免过拟合等问题,还需要进一步研究。
[1] 刘旭升,张晓丽.森林植被遥感研究进展与对策[J].林业资源管理,2004(1):61-64.
[2] 张光辉.高光谱遥感技术在现代林业中的应用与发展[J].四川林勘设计,2007(16):66-69.
[3] ERBEK F S, OZKAN C, TABERNER M. Comparison of maximum likelihood classification method with supervised artificial neural network algorithms for landuseactivities[J]. International Journal of Remote Sensing,2004,25(9):1733-1748.
[4] FOODY G M. Supervised image classification by MLP and RBF neural networks with and without an exhaustively defined set of classes[J]. International Journal of Remote Sensing,2004,25(15):3091-3104.
[5] LAWRENCE R, BUNN A, POWELL S, et al. Classification of remotely sensed imagery using stochastic gradient boosting as a refinement of classification tree analysis[J]. Remote Sensing of Environment,2004,90(3):331-336.
[6] PAL M, MATHER P M. An assessment of the effectiveness of decision tree methods for land cover classification[J]. Remote Sensing of Environment,2003,86(4):554-565.
[7] DALPONTE M, BRUZZONE L, VESCOVO L, et al. The role of spectral resolution and classifier complexity in the analysis of hyperspectral images of forest areas[J]. Remote Sensing of Environment,2009,113(11):2345-2355.
[8] PLAZA A, BENEDIKTSSON J A, BOARDMAN J W, et al. Recent advances in techniques for hyperspectralimage processing[J]. Remote Sensing of Environment,2009,113(9):110-122.
[9] CHANJCW, PALINCKX D. Evaluation of Random Forest and Adaboost tree based ensemble classification and spectral band selection for ecotype mappingusing airborne hyperspectralimagery[J]. Remote Sensing of Environment, 2008,112(6):2999-3011.
[10] DU Q, REN H. Real-time constrained linear discriminant analysis to targetdetection and classification in hyperspectralimagery[J]. Pattern Recognition,2003,36(1):1-12.
[11] CLARK M L, ROBERTS D A, CLARK D B. Hyperspectral discrimination of tropical rain forest tree species at leaf to crown scales[J]. Remote Sensing of Environment,2005,96(3):375-398.
[12] CHRISTIAN B, KRISHNAYYA N S R. Classification of tropical trees growing ina sanctuary using Hyperion (EO-1) and SAM algorithm[J]. Current Science,2009,96(12):1601-1607.
[13] PU R, LANDRY S. A comparative analysis of high spatial resolution IKONOS and WorldView-2 imagery for mapping urban tree species[J]. Remote Sensing of Environment,2012,124(9):516-533.
[14] CHO M A, MATHHIEU R, ASNER G P, et al. Mapping tree species composition in South African savannas using an integrated airborne spectral and LiDAR system[J]. Remote Sensing of Environment,2012,125(10):214-226.
[15] PEERBHAY K Y, MUTANGA O, ISMAIL R. Investigating the capability of few strategically placed WorldView-2 multispectral bands to discriminate forest species in KwaZulu-Natal, South Africa[J]. IEEE Geoscience & Remote Sensing Society,2013,7(1):307-316.
[16] DENG S Q, KATOH M, GUAN Q W, et al. Interpretation of forest resources at the individual tree level at Purple Mountain, Nanjing City, China, using WorldView-2 imagery by combining GPS, RS and GIS technologies[J]. Remote Sensing,2014,6(1):87-110.
[17] GHOSH A, JOSHI P K. A comparison of selected classification algorithms for mapping bamboo patches in lower Gangetic plains using very high resolution WorldView-2 imagery[J]. International Journal of Applied Earth Observation and Geoinformation,2014,26(1):298-311.
[18] 王增林,朱大明.基于遥感影像的最大似然分类算法的探讨[J].河南科学,2010,28(11):458-461.
[19] ZHANG R Q, ZHU D L. Study of land cover classification based on knowledge rules using high-resolution remote sensing images[J]. Expert Systems with Applications,2011,38(4):3647-3652.
[20] SUEN C Y, NADAL C, MAI T A, et al. Recognition of totally unconstrained handwritten numerals based on the concept of multiple experts[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,1995,17(1):90-94.
[21] RODRIGUEZ J J, KUNCHEVA L I, ALONSO C J. Rotation forest: a new classifier ensemble method[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(10):1619-1630.
[22] 毛莎莎,熊霖,焦李成,等.利用旋转森林变换的异构多分类器集成算法[J].西安电子科技大学学报,2014,41(5):48-53.
[23] 刘敏,谢伙生.一种基于旋转森林的集成协同训练算法[J].计算机工程与应用,2011,47(30):172-175.
[24] 陈金瓯,柳青.DNA微阵列数据判别的旋转森林方法[J].中国卫生统计,2012,29(4):525-528,534.
[25] DU P J, SAMAT A, WASKE B, et al. Random Forest and Rotation Forest for fully polarized SAR image classification using polarimetric and spatial features[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2015,105(3):38-53.
[26] 韩敏,刘贲.一种改进的旋转森林分类算法[J].电子与信息学报,2013,35(12):2896-2900.
[27] 丁要军.基于改进的旋转森林算法的不平衡网络流量分类方法[J].计算机应用,2015,35(12):3348-3351.
[28] 陈齐,李新通.Landsat 8 OLI影像新增特征对土地覆盖遥感分类的影响分析[J].亚热带资源与环境学报,2015,10(3):79-86.
[29] 丁海勇,卞正富.基于SVM算法和纹理特征提取的遥感图像分类[J].计算机工程与设计,2008,29(8):2131-2132,2136.
[30] 苑丽红,付丽,杨勇,等.灰度共生矩阵提取纹理特征的实验结果分析[J].计算机应用,2009,29(4):1018-1021.
[31] 苗庆林,田晓瑞,赵凤君.大兴安岭不同植被火后NDVI恢复过程[J].林业科学,2015,51(2):90-98.
[32] 于菲菲,曾永年,徐艳艳,等.基于植被分区的多特征遥感智能分类[J].国土资源遥感,2014,26(1):63-70.
[33] Ministry of Land and Resources of the People’s Republic of China. The current Land-use ConditionClassification[EB/OL]. (2007-09-04)[2014-08-15].http://www.mlr.gov.cn/xwdt/jrxw/200709/t20070904_652541.htm.
[34] VAPNIK V. The nature of statistical learning theory[M]. Berlin: Springer Verlag,1999.
[35] 邵良杉,马寒.基于旋转森林的分类器集成算法研究[J].计算机工程与应用,2015,51(23):149-154.
[36] 樊利恒,吕俊伟,于振涛,等.基于改进最大似然方法的多光谱遥感图像分类方法[J].电光与控制,2014,21(10):52-56,74.
[37] 惠文华.基于支持向量机的遥感图像分类方法[J].地球科学与环境学报,2006,28(2):93-95.
[38] 郭立萍,唐家奎,米素娟,等.基于支持向量机遥感图像融合分类方法研究进展[J].安徽农业科学,2010,38(17):9235-9238.
[39] 刘帅,李士进,冯钧.多特征融合的遥感图像分类[J].数据采集与处理,2014,29(1):108-115.
[40] 张颖,王越男,陈利,等.基于Landsat-8影像森林植被信息计算机自动提取研究[J].中国农学通报,2014,30(28):61-66.
Forest Vegetation Classification of Landsat-8 Based on Rotation Forest//
Liang Xiwen, Zhao Yinghui, Zhen Zhen, Wei Qingbin
(Northeast Forestry University, Harbin 150040, P. R. China)
Landsat-8; Rotation forest; Forest vegetation classification; Principal components analysis
梁晰雯,女,1991年4月生,东北林业大学林学院,硕士研究生。E-mail:13206761979@163.com。
赵颖慧,东北林业大学林学院,副教授。E-mail:zyinghui0925@126.com。
2017年1月5日。
S79
1)中央高校基本科研业务费专项资金(2572016CA01)。
责任编辑:潘 华。
