一种连续波系统测速时间误差的自适应修正方法
2017-09-03张慧娟
魏 超,张慧娟,李 冬
(中国人民解放军91550部队94分队, 辽宁 大连 116023)
【装备理论与装备技术】
一种连续波系统测速时间误差的自适应修正方法
魏 超,张慧娟,李 冬
(中国人民解放军91550部队94分队, 辽宁 大连 116023)
提出一种针对连续波测量系统测速数据时间不对齐误差的自适应修正方法。在多源信息融合处理解算飞行器轨迹时,将连续波测速数据的时间误差作为待估参数求解。建立飞行器轨迹参数和时间误差的联合求解模型,采用分步优化法给出飞行器轨迹参数和连续波系统中各单台设备的时间误差估计值。实验结果表明:测速数据修正后,匹配程度明显优于修正前,飞行器轨迹参数的计算精度得到显著提高。
连续波测量系统;数据融合;时延修正;非线性估计

1 时间误差对连续波雷达精度的影响分析
时间误差引起的测量误差和最终飞行器轨迹误差,通常与目标运动特性、误差传播规律、测量体制和观测量本身有关,且无论单向多普勒测速或双向相干测速均会由于短期频率稳定度影响多普勒测速精度[6],因此,不便写出通用模型。

对速度误差的修正,一般采用定位信息,由于连续波测速时间误差修正对定位精度并不敏感,也可利用其他定位信息源对测速元进行时间修正,如连续波雷达自身的定位信息、GPS定位、光学交会定位、单脉冲雷达定位信息、飞行器精确设计轨迹等[7-8]。
2 测速时间误差修正模型


(1)


(2)
在已知连续波雷达测速元时延误差的条件下,可利用式(2)对测速元进行时延误差修正。
下面建立测速时延误差和轨迹参数的联合求解模型,同时解算测速时延误差和轨迹参数。
轨迹参数的3次不等距节点样条表示为[9]:
(3)

轨迹测量数据包括目标的方位角、高低角、距离、径向速度等几种类型,t时刻的观测量s可统一表示为
(4)

假设总共有N个观测量s1,s2,…,sN参与轨迹参数解算,建立如下观测方程组:
(5)


3 测速时间误差求解
其中

步骤1 设最大迭代次数为M,收敛阈值取为δ>0,令i=0,初始收敛因子ω0>0,收敛因子ω=ω0,初始时间误差Δt(0)=0。




步骤1 设置最大迭代次数L,收敛阈值取为τ>0,令j=0,初始收敛因子λ0>0,收敛因子λ=λ0,由初始轨迹参数计算其初值β(0)(Δt)。


上述算法步骤中的收敛阈值δ和τ的大小会影响计算误差和迭代次数,减小收敛阈值能够减少计算误差,但会增加迭代次数,从而增加计算耗时。综合考虑计算误差和计算效率,选取δ=0.000 1,τ=0.000 1,算法经过4~6次迭代,时延估计误差即可小于0.000 001 s。算法中引入收敛因子ω和λ是为了保证每步迭代都能沿着梯度下降的方向使RSS的值减少,从而避免迭代发散。
4 仿真实验与结果分析
这里通过仿真实验检验时延误差修正方法的性能。仿真实验中的测量设备包括连续波雷达、单脉冲雷达、光学经纬仪,其中,3台连续波雷达的速度测元的时延误差分别为0.01 s、0.012 5 s和0.015 s。
图1~图6是3台雷达测速元时延修正前后的残差对比图,可以看出,时延误差修正前测速元残差有明显的趋势,修正后测速元残差趋势消失,时延误差的估计值分别为0.010 035 s、0.012 499 s和0.015 007 s,接近于仿真时延误差值,表明利用上述方法能够准确估计出连续波雷达测速元的时延误差。
图7和图8分别是时延误差修正前后轨迹位置参数和速度参数的误差对比,修正前位置误差为9.57 m,速度误差为0.127 m/s,修正后位置误差为0.06 m,速度误差为0.007 m/s,表明本文方法能显著提高轨迹参数的计算精度。
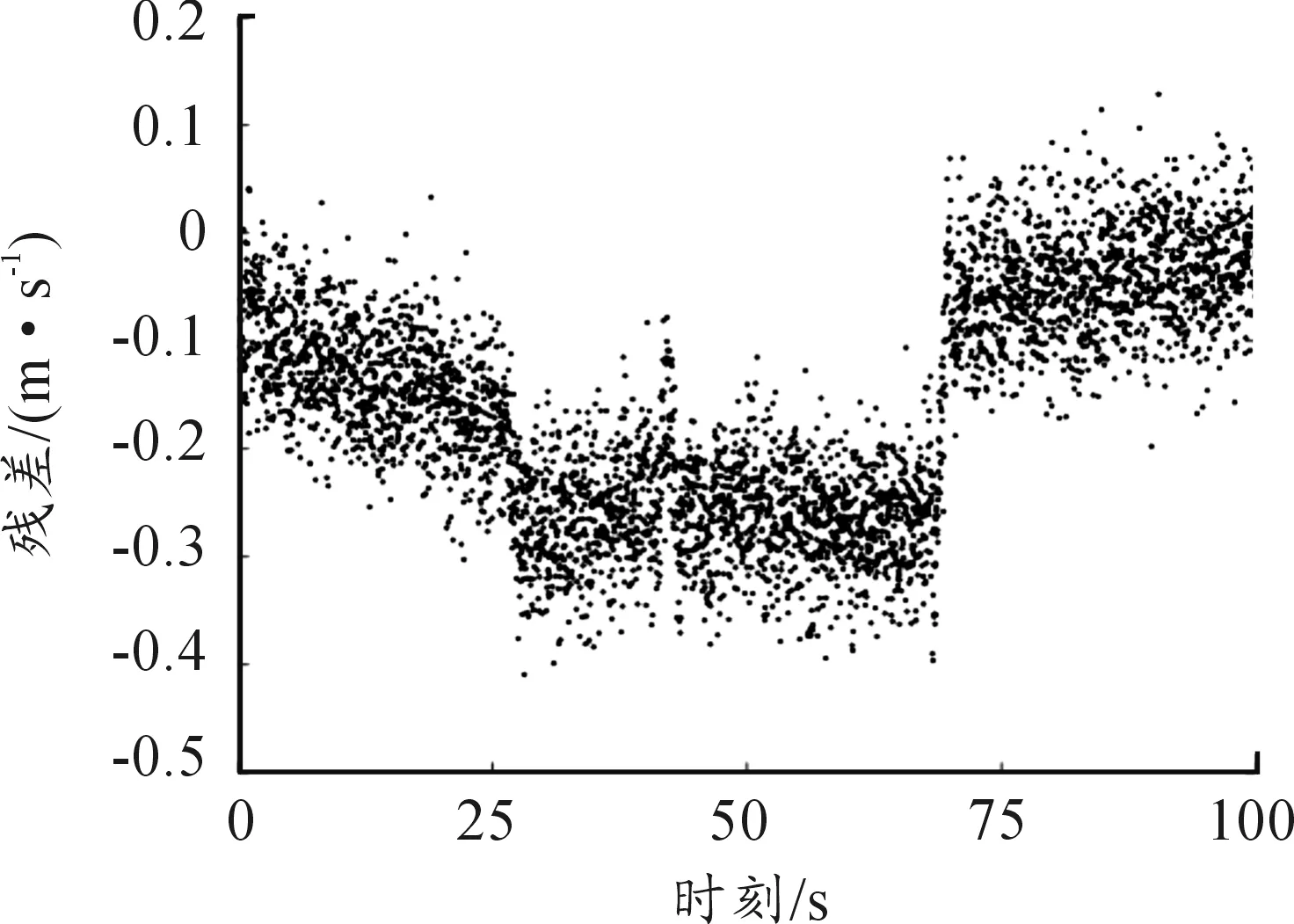
图1 雷达1未修正时延误差的测速残差

图2 雷达1修正时延误差后的测速残差

图3 雷达2未修正时延误差的测速残差

图4 雷达2修正时延误差后的测速残差

图5 雷达3未修正时延误差的测速残差
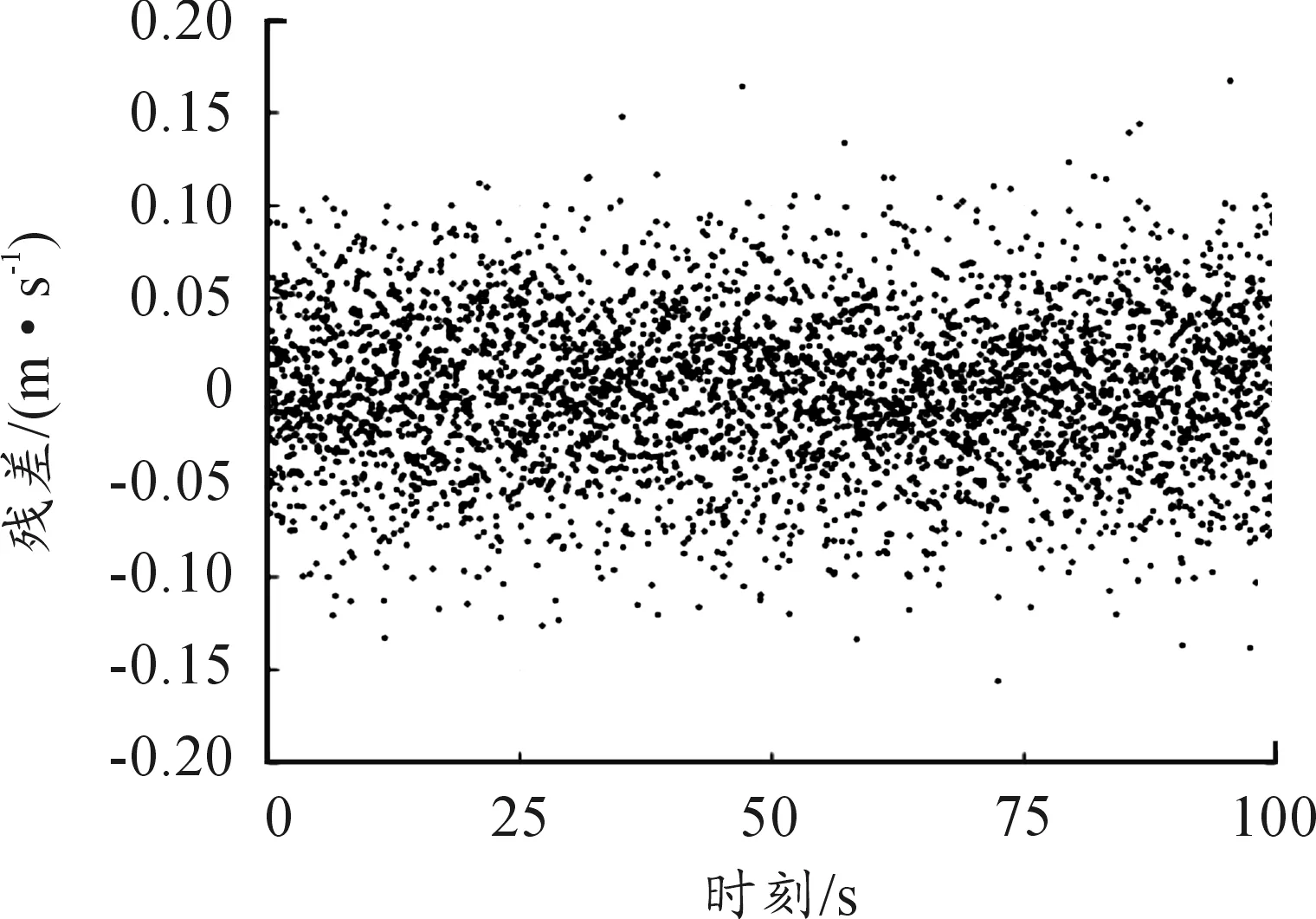
图6 雷达3修正时延误差后的测速残差
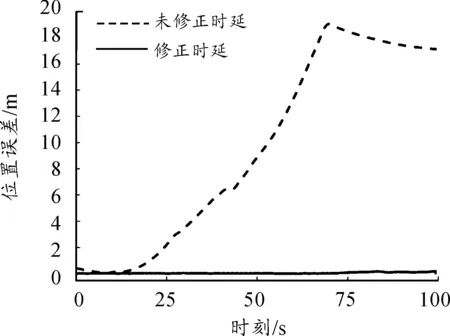
图7 轨迹位置参数误差

图8 轨迹速度参数误差
5 结论
详细分析了连续波雷达测速数据的时间误差对轨迹测量精度的影响,针对高动态运动条件下,目标轨迹跟踪高精度测量的要求,采用非线性融合参数估计方法将轨迹用3次样条表示,通过建立测速时延误差和轨迹参数的联合模型,将时延误差、样条系数和系统误差作为待估参数求解。算例分析结果表明,利用本文方法可准确估计速度测元的时延误差,显著提高飞行器轨迹参数的解算精度。本方法已在工程试验中得到应用。
[1] LIU Y,DENG Y K,WANG R,et al.Bistatic FMCW SAR signal model and imaging approach[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3):2017-2028.
[2] 刘嘉兴.测距误差的群时延特性分析方法及其在深空测控中的应用[J].飞行器测控学报,2009,28(2):22-26.
[3] 侯志,缪晨,吴文,等.一种对称三角线性调频连续波雷达的校正算法[J].兵工学报,2010,31(12):1546-1550.
[4] 夏南银.航天测控系统[M].北京:国防工业出版社,2002.
[5] 李华敏,王瑛,李晓松.多站制CW雷达目标动态模拟器设计[J].电讯技术,2012,52(1):58-61.
[6] 贾兴泉.连续波雷达数据处理[M].北京:国防工业出版社,2005.
[7] 完诚.一种毫米波调频连续波雷达的目标速度测量方法[J].舰船电子对抗,2016,39(4):47-51.
[8] 纪飞,楼生强,辛勤,等.连续波雷达加速度和速度估计方法研究[J].现代电子技术,2011,34(21):17-22.
[9] 王正明,易东云,周海银,等.弹道跟踪数据的校准与评估[M].长沙:国防科技大学出版社,1999.
[10]费业泰.误差理论与数据处理[M].北京:机械工业出版社,2000.
(责任编辑 周江川)
An Adaptive Time-Error Correction Method for Velocity Measurement of Continuous Wave Radar System
WEI Chao, ZHANG Huijuan, LI Dong
(Unit 94, the No. 91550thTroop of PLA, Dalian 116023, China)
An adaptive time-error correction method for the velocity element of continuous wave (CW) radar measurement system is proposed in this paper. When the multi-source data fusion method is used to calculate the trajectory of aircraft, the time-error in velocity measurement of the CW radar is treated as a parameter to be estimated. The combined computation model for the trajectory parameters and time-error is constructed. By using stepwise optimization method, the trajectory parameters and the time-error in velocity measurement of each single device are jointly estimated. The experiment results indicate that the corrected velocity matches the real value, and the estimation accuracy of trajectory parameters is highly improved.
CW radar measurement system; data fusion; time-error correction; non-linear estimation
2017-04-25;
2017-05-25
魏超(1981—),男,工程师,主要从事装备试验数据处理研究。
10.11809/scbgxb2017.08.010
format:WEI Chao, ZHANG Huijuan, LI Dong.An Adaptive Time-Error Correction Method for Velocity Measurement of Continuous Wave Radar System[J].Journal of Ordnance Equipment Engineering,2017(8):41-44.
TN957.52
A
2096-2304(2017)08-0041-04
本文引用格式:魏超,张慧娟,李冬.一种连续波系统测速时间误差的自适应修正方法[J].兵器装备工程学报,2017(8):41-44.