航天器大型柔性附件地面模态试验与性能评价研究
2017-08-17唐国安郭其威董寻虎
臧 旭,唐国安,郭其威,董寻虎
航天器大型柔性附件地面模态试验与性能评价研究
臧 旭1,2,唐国安1,郭其威2,董寻虎2
(1Ʊ复旦大学航空航天系,上海200433;2.上海宇航系统研究所,上海201109)
航天器大型柔性附件地面模态试验既须考虑空气阻力影响,又要分析地面重力带来的边界效应的影响,以动力学特性完全确定的标准杆结构为依托,首先在气动⁃电磁悬挂系统上进行不同长度标准杆地面模态试验,然后利用Rayleigh⁃Rize法和有限元法进行数值仿真模拟,研究表明气动⁃电磁超低频悬挂系统使水平方向测试结果偏高而使垂直方向测试结果偏低,并开展气动⁃电磁超低频悬挂系统性能评价研究,建议通过电磁力抵消附加质量影响并在水平方向增加随动设计。
气动⁃电磁悬挂装置;零重力模拟;模态试验;数值模拟
1 引言
太阳电池翼、天线、机械臂等航天器大型柔性附件具有低频、密模、非线性等结构动力学特性,需通过地面动力学验证试验保证其在执行任务时的安全性。由于重力、空气等环境因素的影响,要在地面上对大型柔性附件进行模拟太空试验极其困难。目前模拟地面低重力方法主要包括:惯性补偿法[1⁃3]、气浮法[4]和悬吊法[5]等。惯性补偿法仅能得到短时间的零重力环境;气浮法由于气浮组件附加质量及气浮阻力影响,测试数据远低于在轨数据;而悬吊法因其具有附加质量小、试验时间不受限制且可模拟三维空间的低重力环境等优势而被广泛应用。
采用悬吊法模拟低重力环境,受系统悬挂频率、附加质量及单摆效应影响,地面动力学测试数据与在轨状态存在差异。Bertran[6]采用低刚度弹簧系统和橡皮绳悬挂系统,对阿里安4整流罩进行动力学测试。Sleight等[7⁃8]通过绳索机构及滑轮组,并利用配重抵消太阳帆重力进行模态测试,综合考虑悬挂系统及重力影响修正有限元建模,获取太阳帆在轨动力学参数。王泽宇等[9]开展了气浮和悬吊两种状态下的卫星微振动对比研究试验,分析了两种边界条件对试验结果的影响。按GJB2706A—2008《航天器模态试验方法》要求,采用悬吊法模拟失重状态,要求悬挂系统的固有频率小于试验件基频的1/5,如空间站大面积太阳柔性电池翼基频约0Ʊ 05 Hz,故进行超低频模态试验要求悬挂频率小于0Ʊ 01 Hz,常规低刚度弹簧系统和橡皮绳悬挂系统无法满足需求。
气动⁃电磁超低频悬挂装置可模拟在轨零重力和无摩擦环境,该系统悬挂频率小于0Ʊ 03 Hz,已成功运用于刚性、半刚性太阳电池翼等低频(基频0Ʊ 1 Hz~0Ʊ 2 Hz)附件地面模态试验[10]。当超低频柔性附件基频为0Ʊ 05 Hz左右时,系统悬挂频率、附加质量及单摆效应影响不可忽略,需要根据气动⁃电磁悬挂装置动力学特性,修正试验数据获取柔性附件动力学参数。
本文以动力学特性完全确定的标准杆为对象,采用气动⁃电磁装置悬挂模拟自由边界条件,使用预紧力释放和大位移激振器激励2种激励方法对其进行测试,将气动⁃电磁悬挂装置+标准杆系统简化为带有任意分布弹簧质量系统的梁的自由振动问题,运用Rayleigh⁃Ritz法[11]和有限元法研究气动⁃电磁超低频悬挂系统对航天器大型柔性附件地面模态试验结果的影响,并开展气动⁃电磁超低频悬挂系统性能评价研究,给出该系统的适用范围及改进方案。
2 地面模态试验方案设计
2Ʊ 1 标准杆试验件
采用一套动力学特性完全确定的标准杆模拟航天器大型柔性附件。标准杆件由若干根长2 m的铝管通过质量为1Ʊ 3 kg的法兰盘连接而成,每节连接处可以安装配重块,铝管截面为空心梁,内外径分别为0Ʊ 07 m和0Ʊ 065 m,每两根铝管之间的法兰盘通过8个螺栓连接在一起,以保证连接刚度,如图1所示。试验前通过调节标准杆节数及增加质量为2 kg的配重块设计标准杆一阶频率。
2Ʊ 2 自由边界条件的模拟
航天器大型柔性附件模态试验所面临的首要问题是自由边界条件的模拟,本文采用气动⁃电磁超低频悬挂系统,如图2所示,主要由气动子系统和电磁子系统构成。其中:气动子系统主要由无摩擦气缸⁃活塞、外部储气罐、精密气压控制装置等构成,除了给试验系统提供无摩擦的环境条件外,还须提供恒定的悬挂力以平衡试件的重力;电磁子系统由长行程动圈作动器和配套的功率放大器、位移传感器、加速度传感器、高精度压力传感器以及压力波动计算机处理电路、计算机控制装置等构成,并且须提供非接触的电磁力以满足悬挂装置对微小力的各种需求[12]。试验中试件呈水平展开,每个吊点处采用直径1 mm的钢丝绳吊挂在气动⁃电磁悬挂装置上,通过调节气缸气压来平衡试件的重力,试件根部通过转接工装直接安装固定在模态试验工装上,试件底部用可调节支架支撑,主要起保护作用,试验时须与试件分离,如图3所示。
2Ʊ 3 激励点的选取
选择激励点位置,最常用的方法是以对驱动点留数的研究为基础的。留数Aijr借助模态参数由式(1)的频响函数表达式定义:
在纯模态情况下,若按单位模态质量换算,模态比例系数则如式(2):
因此,驱动点留数(i=j)如式(3):
(1)、(2)、(3)式中,ψir、ψ∗ir为复值模态位移,λr、λ∗
r为共轭极点。由(3)式可知,某个或某些自由度对于尽可能多的模态,当留数值Aijr较大时,这样的自由度就是比较好的激励点,当某个ψir为零时,意味着激励点在某一阶模态的一个节点上,将会导致这阶模态不能检测出来[13]。试验中在式(3)的理论支撑下,结合工程经验及需求选择单点激励点的位置,并根据预试验结果调整。2Ʊ 4 激励方式
由于试件一阶频率很低,用肉眼就可以看到其摆动的振型,且无任何附加干扰因素的影响,对此类低频柔性结构来说,预紧力释放自由衰减法是最直观、最可靠的方法。试验采用预紧力释放自由衰减法和大位移激振器激励法相互校验获取试件频率和振型测试数据。
2Ʊ 5 传感器选取及测点布置
柔性附件自身基频较低,采用接触式传感器将引入附加质量降低系统频率、增加测试难度,故采用激光位移传感器。传感器的数目和位置取决于关心频率范围、期望的模态数目、试件上的关心区域、可用的传感器数。结合仿真分析和预试验确定传感器位置和个数,测点的数量和位置应表征在工程有意义频带内各阶主模态振型的基本轮廓[13]。对于标准杆试验,在每个法兰盘连接处设置一个传感器。
3 试验实施
模态试验先采用预紧力释放法测试,记录试验时域和频域数据,根据测试数据初步得到试件基频,再进行激振器激励试验。试验采用单点随机激励方式,频率分辨率设定为0Ʊ 01 Hz。为了防止功率泄漏,采用汉宁窗方式进行加窗处理。模态试验采用LMS系统进行数据采集和处理,试验结果按GJB2706A⁃2008《航天器模态试验方法》对所有试验数据品质进行评定,通过相干性、互易性、数据重复性以及模态特性的相关性检查与检验对试验所测得的结果进行判定,从而识别出试件真实的各阶模态参数。表1为11个工况模态试验状态及测试结果。
4 气动⁃电磁悬挂装置影响分析
4Ʊ 1 气动⁃电磁悬挂装置力学等效
采用悬吊法模拟低重力环境,会改变被测系统的边界条件,需要根据悬挂装置设计原理获取其动力学特性,分析该装置带来的边界条件效应对被测系统动特性的影响。气动⁃电磁悬挂装置在与地面垂直方向能提供恒定的平衡试件重力的悬挂力Td,并沿垂直地面方向无摩擦随动,即提供超低悬挂频率,可将其简化成一个弹簧质量系统,悬挂力Td由气动力Fp和电磁力Fm两部分组成,如图4所示,随动部件附加质量Mv=5 kg,垂直方向附加刚度kv随气缸气压变化而变化,气缸气压越大(单点吊力越大),kv越小[14]。系统在水平方向做类单摆运动,恢复力为F恢复=Td× sinθ=Td×(y/Ld)=(Td/Ld)×y,其中Td、Ld、、y分别为悬挂力、悬挂高度和水平位移。当悬挂高度Ld>>y时,水平方向也可视为弹簧质量系统,如图5所示,等效刚度kh=Td/Ld。
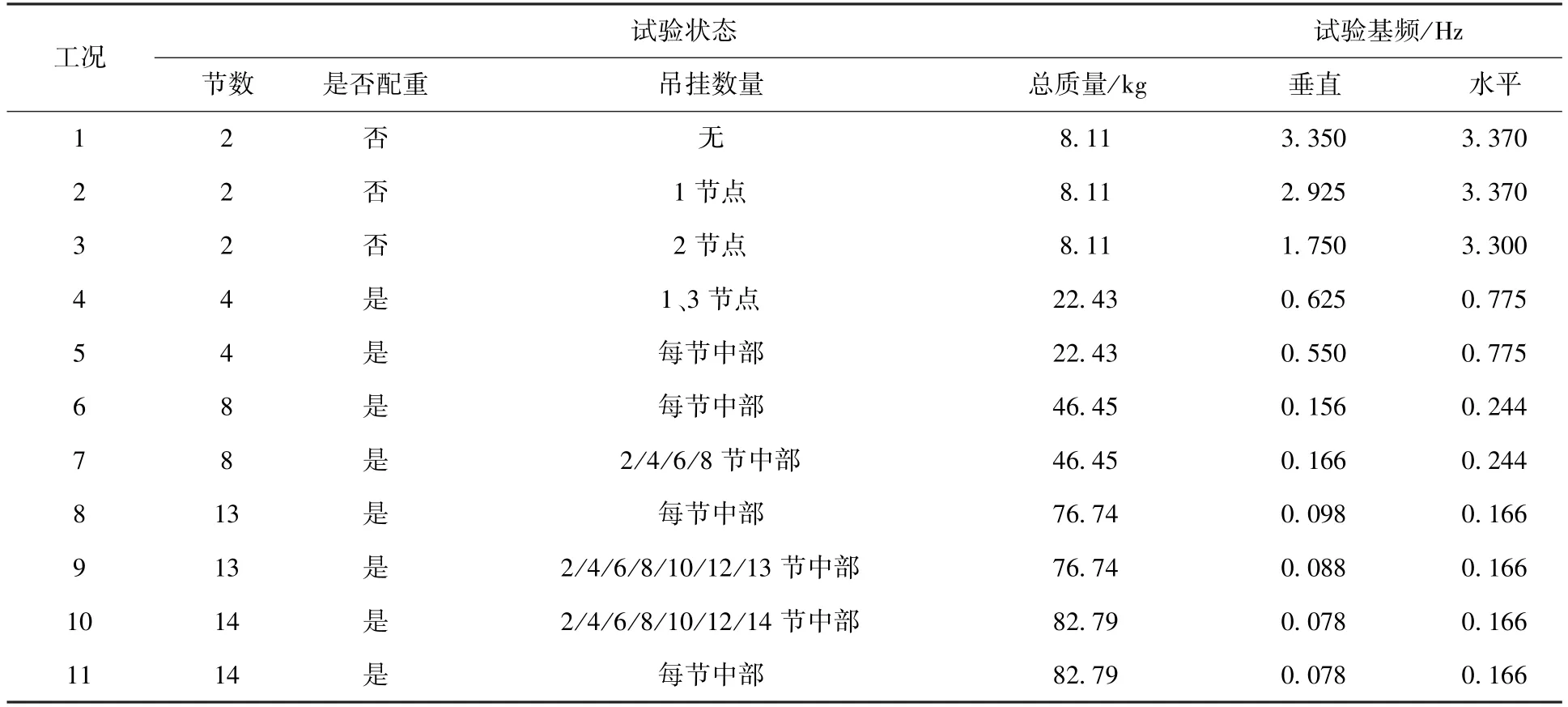
表1 模态试验状态及测试结果Table 1 Conditions and results of modal test
考虑气动⁃电磁悬挂装置影响的标准杆试件如图6所示,试件一端固支一端自由,各悬挂点均采用纵向及横向弹簧模拟。假设标准杆均匀细长,长度为L,截面积为A,密度为ρ,弹性模量为E,截面转动惯量为I,引入狄拉克δ(x)函数,集中质量点mi可以考虑为分布质量mi(x)=miδ(x⁃xi),其中xi为集中质量点mi所在的位置,对集中弹簧做类似处理,则该模型的弯曲振动方程如式(4)、式(5)所示:
其中,式(4)为垂直方向振动方程,式(5)为水平方向振动方程;i=1,…,Na,Na为悬挂装置的组数,j=1,…,Nv,Nv为法兰盘的组数;wv、wh为梁的垂直和水平方向的振动位移;kv、mv为悬挂装置的附加刚度和质量,kh为单摆效应的附加刚度,ma为法兰盘质量。
4Ʊ 2 Rayleigh⁃Ritz法
关于带有弹簧质量系统梁的动力特性分析,一般运用Rayleigh⁃Ritz法、传递矩阵法或者其他数值方法进行求解获得近似结果[15]。本文采用Rayleigh⁃Ritz法,根据系统边界条件令基函数及梁系振动位移函数如式(6)、式(7)所示:
将(6)、(7)代入(4),求系统垂直方向特征值ωv
2的问题等价于求泛函式(8)的驻值问题[16]:
即求方程(Kv-Mv)a=0的特征值问题。求系统水平方向特征值等价于求(Kh-)a=0的特征值问题,其中:
为了能更好地分析悬挂装置对梁系的影响,对系统进行简化处理,假设每两个法兰盘之间梁长度相同为l,整个梁系共有n节,且每个法兰盘处设置一套悬挂装置,所有悬挂装置的吊力相同。令基函数φk(x)仅取一项,则位移函数如式(10)所示:
1)垂直方向振动
将式(10)代入式(9)中得到系统沿垂直方向振动基频如式(11)所示:
并将其与梁系统固有基频做差得到式(12):
其中,ωv为垂直方向测试基频,ω为梁系统固有基频。当L较小时,系统模态频率较高,式(12)第二项大于第一项,此时悬挂装置附加质量mv起主要作用,测试频率低于系统模态频率;随着L增加,n→∞,系统固有频率降低,式(12)第一项逐渐增大,第二项逐渐减小,当第一项大于第二项时,悬挂装置附加刚度kv起主要作用,测试频率高于系统模态频率。
2)水平方向振动
与系统垂直方向振动相同,通过基函数式(9)得到系统水平方向系统基频如式(13)所示:
其中,Td为单台悬挂装置的吊挂力,Ld为其吊挂高度。将k代入h
d
d中得到式(14):
从式(14)可以得到,由于水平方向等效刚度kh的作用,使得在悬挂装置下的测试频率高于系统的固有频率。随着L增加n→∞,式(14)分子第一项趋于0,且分母第一项满足式(15):
代入式(14)得到,当n→∞时水平方向系统基频如式(16):
由式(16)可以看出,水平方向测试频率高于系统固有频率,并随着L增加,n→∞,测试频率趋近于对应吊高的单摆频率,即ωh=
4Ʊ 3 有限元法
对考虑气动⁃电磁悬挂装置影响的标准杆试件运用MSC.Patran进行有限元建模,模型如图7所示。为了考虑悬挂装置及重力对梁系固有频率影响,在建模时加入悬挂装置等效模型。悬挂装置附加刚度和附加质量分别采用弹簧单元和集中质量单元模拟。弹簧单元上端约束6个自由度,下端与集中质量单元连接处释放垂直方向自由度,同时施加作用力模拟空气系统和电磁系统的初始合力,并在边界条件中加入初始重力场。悬挂装置的吊绳设置为直径1 mm的钢丝绳,吊挂高度11 m。
4Ʊ 4 分析结果对比
单台系统悬挂质量约7 kg,垂直方向附加刚度kv=2Ʊ 3 N/m。为获得较好的近似解,位移函数式(6)项数应比所求固有频率的阶数多一倍以上,本文选取10项。表2和表3给出n=4时,系统在垂直和水平方向振动频率的Rayleigh⁃Ritz法计算结果与有限元分析结果的对比,其中表2第3列为图7所示有限元分析结果,第5列为无吊绳状态有限元分析结果。对比说明Rayleigh⁃Ritz法和有限元建模方法的正确性,由于在垂直方向Rayleigh⁃Ritz法忽略吊绳影响,导致高阶频率与有限元结果偏差较大。表4为标准杆基频模态试验数据、Rayleigh⁃Ritz法计算结果及有限元法分析结果对比,三组数据偏差小于5%,进一步说明本文分析方法的有效性。
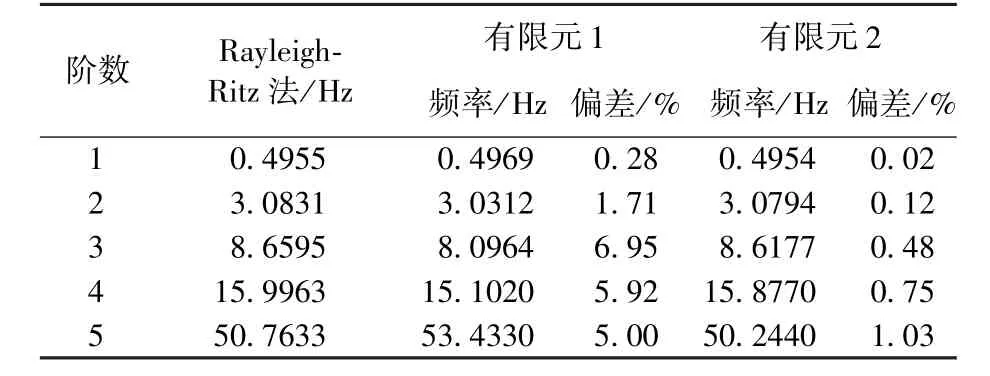
表2 垂直方向前5阶固有频率对比Table 2 Comparison of the first five order inherent fre⁃quencies in vertical direction
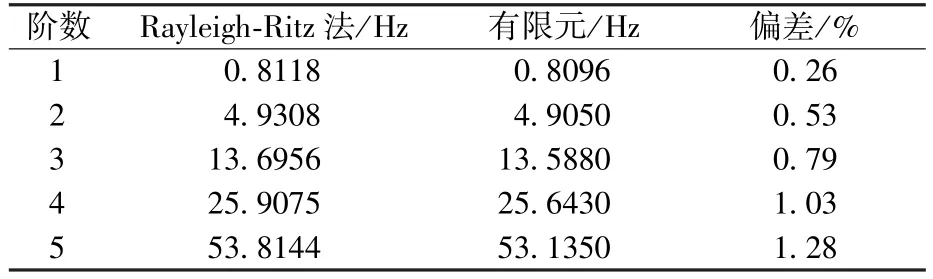
表3 水平方向前5阶固有频率对比Table 3 Comparison of the first five order inherent fre⁃quencies in horizontal direction
5 气动⁃电磁悬挂系统性能评价
气动⁃电磁悬挂装置垂直方向附加刚度kv随气缸气压变化而变化,且气缸气压越大(对应于试件质量越大),kv越小。同时改变附加刚度kv和梁的节数n,系统垂直及水平方向基频随节数n的变化曲线见图8和图9。
在与地面垂直方向受附加质量和附加刚度共同影响,高频段测试频率高于真实频率,随被测试件频率下降,测试频率趋近于真实频率,并在特定频率处(附加刚度越低该频率值越小)超过真实频率,最终趋向于固定值,测试频率与真实频率始终存在误差。垂直随动系统附加质量可以通过电磁系统进行抵消[13],忽略附加质量影响后测试频率变化曲线如图10所示。起始段测试频率与真实频率保持一致,随着被测试件频率下降,测试频率高于真实频率,为保证测试值在0Ʊ 05 Hz左右且可信,则:1)当kv<0Ʊ 02 N/m时,悬挂装置系统误差可忽略;2)当0Ʊ 02 N/m<kv<1Ʊ 2 N/m时,测试频率变化可辨识,但测试数据存在系统误差需进行理论修正;3)当kv>1Ʊ 2 N/m时,测试频率变化无法辨识,测试数据不可用。
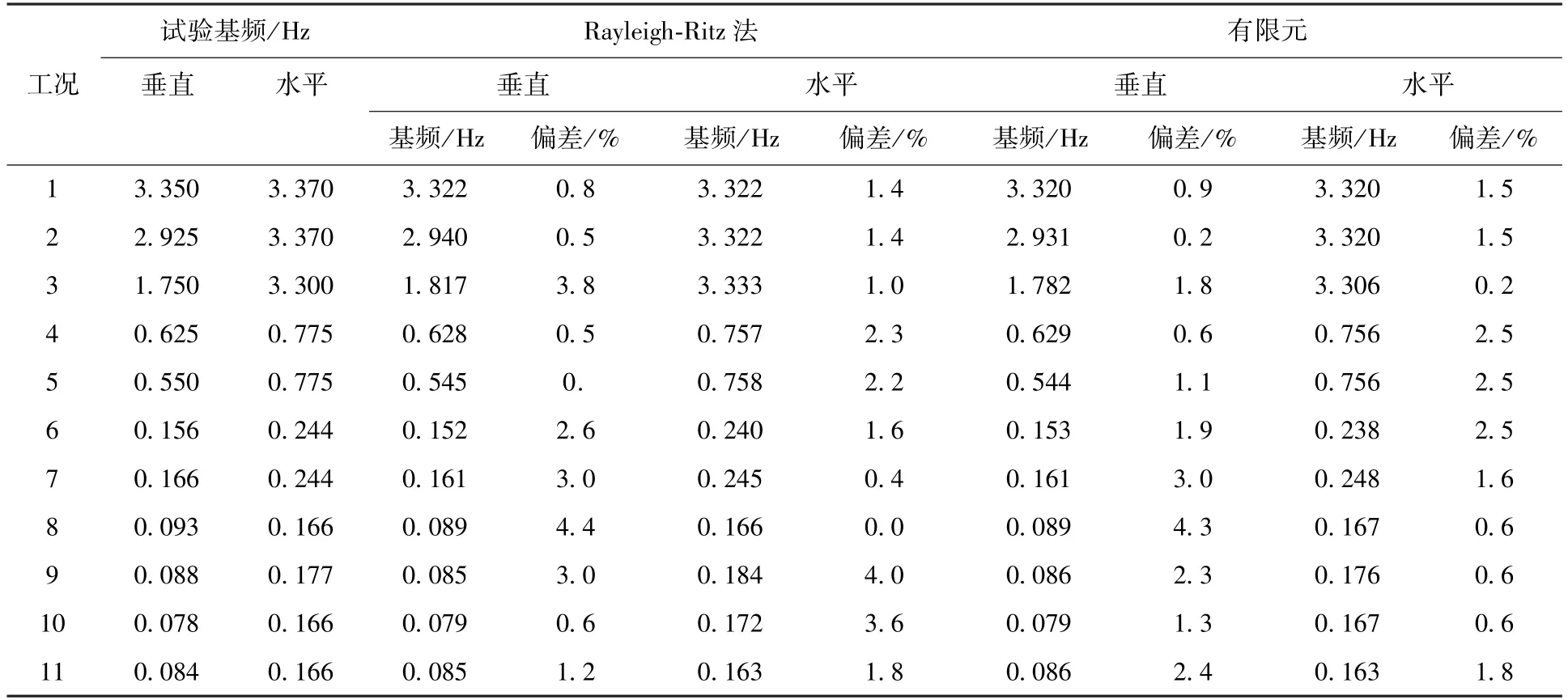
表4 基频对比结果Table 4 Comparison of the fundamental frequency
在水平方向,当测试频率高于单摆频率的4~5倍时单摆效应可以忽略,即被测试件频率0Ʊ 1 Hz需要吊高超过100 m。因此,建议悬挂装置在水平方向增加随动设计以消除单摆效应影响。
6 结论
1)对于常规低刚度弹簧系统及橡皮绳悬挂系统,垂向附加刚度kv无法满足超低频柔性附件地面模态测试要求,但由气动⁃电磁悬挂装置带来的边界条件效应对测试结果的影响不可忽略,在模型修正时需考虑悬挂系统及重力因素影响。
2)气动⁃电磁悬挂装置在垂直方向,当被测机构固有频率较高时,主要表现为附加质量影响,测量频率低于固有频率;随着机构固有频率降低,附加刚度影响起主要作用,测量频率高于固有频率。为了进行超低频柔性附件(基频约0Ʊ05 Hz)动力学试验,需要平衡随动装置附加质量,并且测试结果对附加刚度kv的取值非常敏感。当kv<0Ʊ02 N/m时,测试数据有效,当设计0Ʊ02 N/m<kv<1Ʊ2 N/m时,测试数据需进行理论修正,当kv>1Ʊ 2 N/m时,不可在该重力平衡系统上进行测试。
3)气动⁃电磁悬挂装置在水平方向为单摆效应影响,使测试频率高于系统固有频率,建议悬挂装置在水平方向增加随动设计以消除单摆效应影响。
(References)
[1] Chen C I,Chen Y T,Wu S C,et al.Experiment and simula⁃tion in design of the board⁃level drop testing tower apparatus[J].Experimental Techniques,2012,36(2):60⁃69.
[2] Nicolau E,Poventud⁃estrada C M,Arroyo L,et al.Micro⁃gravity effects on the electrochemical oxidation of ammonia:A parabolic flight experiment[J].Electrochimica Acta,2012,75:88⁃93.
[3] Carignan C R,Akin D L.The reaction stabilization of on⁃or⁃bit robots[J].IEEE Control Systems Magazine,2000,20(6):19⁃33.
[4] Schmitz E.Modeling and control of a planar manipulator with an elastic forearm[C]//IEEE Int.Conf.Robotics&Auto⁃mation,Scottsdale,AZ:IEEE RAS,1989:894⁃899.
[5] 刘振.星球车单吊索重力补偿与实验研究[D].哈尔滨:哈尔滨工业大学,2013. Liu Zhen.Single⁃cable Gravity Compensation for Planetary Rovers and Experimental Researches[D].Harbin:Harbin In⁃stitute of Technology,2013.(in Chinese)
[6] Bertran,李庆忠.用扩充的模态鉴定试验验证阿里安4卫星有效载荷整流罩数学模型[J].国外导弹与航天运载器,1990,(12):49⁃58.Bertran,Li Qingzhong.Simulation model of Arian 4 satellite payload fairing with extended modal verification test[J].For⁃eign Missiles and Space Carriers,1990,(12):49⁃58.(in Chinese)
[7] Sleight D W,Michii Y,Lichodizieiewski D,et al.Structural a⁃nalysis of an inflation deployed solar sail with experimental validation[C]//41th AIAA/ASME/SAE/ASEE Joint Propul⁃sion Conference&Exhibit,Tucson,Arizona,2005:78⁃92.
[8] Sleight D W,Michii Y,Lichodizieiewski D,et al.Structural a⁃nalysis and test comparison of a 20_meter inflation deployed solar sail[C]//AIAA/ASME/ASCE/AHS/ASC Structures,Structural DynamicsandMaterialConference,Newport,Rhode Island,2006:43⁃50.
[9] 王泽宇,邹元杰,焦安超,等.某遥感卫星平台的微振动试验研究[J].航天器环境工程,2015,32(6):278⁃285.Wang Zeyu,Zou Yuanjie,Jiao Anchao,et al.The jitter measurement and analysis for a remote sensing satellite plat⁃form[J].Spacecraft Environment Engineering,2015,32(6):278⁃285.(in Chinese)
[10] 刘松,邹义成,丁瀛,等.大型太阳电池阵模态试验方法[J].航天器环境工程,2013,30(2):165⁃170.Liu Song,Zou Yicheng,Ding Ying,et al.Modal test for large solar array[J].Spacecraft Environment Engineering,2013,30(2):165⁃170.(in Chinese)
[11] Xu H A,Du J T,Li W L.Vibrations of rectangular plates re⁃inforced by any number of beams of arbitrary lengths and placement angles[J].Journal of Sound and Vibration,2010,329:3759⁃3779.
[12] Sun Jianhui,Shan Xiaohang,Zhang Xiujun.Analysis and re⁃search on friction⁃free cylinder of modal testing suspension system[C]//WSEAS Transactions on Circuits and Systems et al,Hangzhou,2008:42⁃46.
[13] 郭其威,吴松,刘芳,等.航天器模态分析-试验体系工程实践研究[J].动力学与控制学报,2014,12(3):274⁃278.Guo Q W,Wu S,Liu F,et al.Research on engineering practice of modal analysis⁃test of spacecraft[J].Journal of Dynamics and Control,2014,12(3):274⁃278.(in Chi⁃nese)
[14] 孙建辉,王时杰,单晓杭,等.模态试验悬挂系统附加质量惯性力抑制效果检验技术研究[J].轻工机械,2010,28(4):87⁃90.Sun Jianhui,Wang Shijie,Shan Xiaohang,et al.Research on restraining the attached inertia force in modal test suspen⁃sion system[J].Light Industry Machinery,2010,28(4):87⁃90.(in Chinese)
[15] Warburton G B.Response using the Rayleigh⁃Ritz method[J].Journal of Earthquake Engineering and Structural Dy⁃namics,1979,7:327⁃334.
[16] 李东旭.高等结构动力学[M].北京:科学出版社,2010:90⁃99.Li Dongxu.Dynamics of Structures[M].Beijing:China Sci⁃ence Publishing,2010:90⁃99.(in Chinese)
(责任编辑:庞迎春)
Ground Modal Test and Performance Evaluation of Large Flexible Accessories in Spacecraft
ZANG Xu1,2,TANG Guoan1,GUO Qiwei2,DONG Xunhu2
(1.Department of Aeronautics and Astronautics,Fudan University,Shanghai 200433,China;2.Aerospace System Engineering Shanghai,Shanghai 201109,China)
In ground modal test of the large flexible accessories of spacecraft,the impact of air re⁃sistance should be considered and the impact of the border effect brought by the gravity should be analyzed.Based on the standard beam structure with the determined dynamic characteristics,the ground modal test on beams with different lengths was carried out on the suspension system.Then,the Rayleigh⁃Rize method and the finite element method were used to conduct the numerical simula⁃tion.The results showed that the pneumatic⁃electromagnetic suspension system elevated the horizon⁃tal test result and decreased the vertical direction test result.In addition,study on the performance evaluation of the suspension system was also carried out.It is recommended that electromagnetic force be used to offset the additional mass effect and the servo design be added in the horizontal di⁃rection.
pneumatic⁃electromagnetic suspension system;zero gravity simulation;modal test;nu⁃merical simulation
V416Ʊ 2
A
1674⁃5825(2017)04⁃0556⁃08
2017⁃03⁃09;
2017⁃06⁃29
上海扬帆计划(15YF1411900)
臧旭,男,博士研究生,工程师,研究方向为航天器结构动力学。E⁃mail:zx1063210225@126.com
