单层构架式可展结构平面度分析与测试
2017-08-17吴明儿张振昌关富玲
吴明儿,张振昌,关富玲
·柔性结构机构材料、工艺与试验·
单层构架式可展结构平面度分析与测试
吴明儿1,张振昌1,关富玲2
(1.同济大学建筑工程系,上海200092;2.浙江大学空间结构研究中心,杭州310058)
对某弹性元件驱动的单层构架式可展结构的平面度评价指标进行了定义。根据可展结构基本组成单元中构件的相互几何关系,结合Monte Carlo法及多元线性回归方法,分析了构件的尺寸和加工误差对可展结构平面度的影响,利用非接触测量方法测试了可展结构模型的平面度。参考平面度分析结果,在可展结构模型I的基础上减小接头开孔圆心至侧板边缘尺寸并制作模型II。经测试,模型II的平面度得到改善且满足设计要求,验证了平面度改善方法的可行性。
可展结构;平面度;非接触测量;误差分析
1 引言
小卫星具有体积小、功能强、研发周期短和使用灵活等诸多优点[1]。自二十世纪八十年代英国提出小卫星研制技术以来,已经有包括美国及欧洲国家在内的数十个国家参与小卫星的技术及应用开发[2]。我国将小卫星及其应用的发展作为高新技术领域未来发展的重点[3]。可展结构以其自身结构特点可大大提升小卫星的功能,扩展其应用范围,因而成为小卫星研究热点之一。
可展结构展开状态下表面的形面精度是其所承载的电学或光学元件正常工作的重要保证。目前对于可展结构形面精度的研究主要集中于充气薄膜天线和网状可展天线等曲面型可展结构以及太阳帆板等平面型可展结构。对充气薄膜天线的形面精度而言,充气气压控制和膜面成形工艺是主要的研究方向[4⁃6];对网状可展天线的形面精度而言,索网找形是主要研究方向[7⁃9];对太阳帆板平面度的研究集中在测量方法[10]。本文研究的可展结构为平面型结构,根据其使用特点对展开状态下的平整程度有要求,其平面平整度以平面度表示。
本文对平面度进行定义,分析构件尺寸和误差对平面度的影响,并对展开结构模型进行平面度测试。根据分析结果对展开结构尺寸进行调整,以改善可展结构平面度。
2 可展结构方案
本文研究的可展结构应用于小卫星,需要满足展开状态下平面平整度不超过1°的设计要求。可展结构的设计方案如图1所示。
图1 中的可展结构共含84根杆件,通过双向、三向、四向和六向节点连接,并且由安装于各节点的弹簧实现展开驱动。可展结构在展开状态下的杆件与节点形成一个平面。考虑到可展结构通过中心节点与卫星相连,本文以中心节点表面形成的平面作为参考基准面,将可展结构平面度定义为每根杆件上表面与中心节点平面的夹角值。通过控制夹角的大小,保证可展结构的平面度。
可展结构由图2所示的等边三角形基本展开单元组成。杆件、接头和节点的连接如图3所示。理想状态下,杆件在扭簧的预扭矩作用下转动90°,由于限位底板的限位作用展开到与中心节点表面的夹角为0°的状态。考虑到安装的可行性及展开的灵活性,可展结构中节点、销轴和接头的尺寸需要进行适当的放大和减小,尺寸公差间需要进行配合设计。同时,构件尺寸本身就存在一定的加工误差。因而,杆件表面与中心节点平面将存在一定的夹角。
3 可展结构平面度分析
首先将对平面度的分析简化为单根杆件绕其相邻节点的转动分析。如图3,杆件首先通过销轴与接头连接,然后接头再通过销轴与节点连接,其中扭簧位于接头与节点之间,为可展结构的展开提供扭矩。图3中的直角坐标系各坐标轴方向定义如下:y轴沿杆件轴向;z轴垂直于节点平面向上;x轴平行于节点表面。对于杆件相对接头的转动,可在二者对齐的情况下将二者牢固粘合,因此忽略这一部分转动对平面度的影响。对于接头相对节点的转动,由于绕y轴、z轴的方向受力不大,并且绕z轴的转动为平面内转动,故忽略这两部分对平面度的影响;由于绕x轴方向存在扭簧提供的扭矩,在尺寸误差存在的情况下,接头相对节点绕x轴必将转动一定的角度,本文仅把这一角度值作为平面度的影响因素进行分析。
图4为节点与接头的连接示意图。在各尺寸误差不同的取值情况下,接头相对于节点会出现转动不足和转动过度两种状态。图中节点下侧的虚线部分为限位底板所在位置,黑色阴影部分为销轴的截面。A、B、C三点分别为节点、销轴、接头三者连接处各自圆心的位置。图中θ即为接头相对于节点绕x轴转动的角度值。按照加工图纸的尺寸标注信息并参考图4,与θ相关的模型I设计尺寸及公差信息如表1所示。
式(3)和式(4)中AD、DF、CG、DH的数值取尺寸标准值。接头相对节点绕x轴的转动分析就是a1、a2…a7在一定取值情况下求解包含θ方程的问题。按照式(3)和式(4)计算所得的θ值为负时,分别对应图5中(a)、(b)两种情况。观察图5中的A、B两点,此时接头侧板均已经转入到节点的限位底板以内,不符合实际意义,故舍去。定性分析可知:在转动不足状态下,a1、a3、a6的值越小,a2、a4、a7的值越大,则θ越大;在转动过度状态下,a1、a3、a6的值越大,a2、a4、a5的值越小,则θ越大。
对图4中转动不足的状态,根据直角三角形AEG中的三角函数关系得式(1):
展开得式(2):
考虑各尺寸的误差,式(2)展开为式(3):
类似地,对图4中转动过度的状态可得式(4):
4 可展结构平面度分布分析
可展结构中各构件的尺寸误差ai(i=1,2,…,7)为随机变量。由生产实践可知,大批量生产稳定的工艺过程,工件尺寸趋近正态分布[11]。如表1所示,尺寸误差ai(i=1,2,…,7)对应尺寸的公差为:[aib,aiu],aib、aiu分别为尺寸的上、下偏差,中偏差为aim=(aib+aiu)/2。设误差ai满足正态分布,均值为μi,标准差为σi。考虑到实际构件加工质量,暂定公差带宽度取为2σ,即相应尺寸的公差为[μi-σi,μi+σi],则ai的分布参数μi、σi为式(5):
采用Monte Carlo法对可展结构平面度的分布进行分析。按照a1、a2…a7各自的概率分布生成20 000组随机误差值(a1i,a2i,…,a7i)(i=1,2,…,20 000)。将每一组误差值代入到式(3)和式(4)中计算θ,根据满足实际意义的要求,取其中θ≥0的部分。规定转动不足状态平面度符号为负,转动过度状态平面度符号为正,即将式(4)计算所得的θ取负,得到与20 000组误差值一一对应的20 000组平面度值,其分布直方图如图6所示。
对图6中分布进行正态分布拟合,得其均值为0Ʊ 74,标准差为0Ʊ 269。由图6可以看出,在模型I的设计尺寸下,绝大多数θ值处于转动过度的状态。经统计,平面度值θ>1°的频率约为16Ʊ 5%。根据以上分析结果,为了使平面度满足设计要求,需要在模型I的设计尺寸的基础上进行调整。
在平面度调整之前,首先利用多元线性回归方法分析尺寸误差a1、a2…a7对平面度的影响程度。选用转动过度状态下20 000组误差抽样a1,a2,…,a6及对应θ值进行线性回归得式(6):
式(6)中a1、a2…a6前的系数即为多元线性回归方程的偏回归系数β^j(j=1,2,…,6),表示在其他误差变量ak(k≠j,k=1,2,…,6)保持不变时,aj(j=1,2,…,6)增加或者减少1 mm时,θ
的平均变化量。同样,对转动不足状态下的aj(j=1,2,3,4,6,7)和θ进行线性回归得式(7):
对转动过度和转动不足状态的回归方程均进行拟合优度及方程显著性检验,检验结果表明:因变量θ有极好的拟合效果,回归方程回归效果显著。同时,对两种状态下回归方程中各个自变量进行显著性检验,检验结果表明,自变量对因变量线性效果显著。
为了比较各自变量aj(j=1,2,…,7)对因变量θ的影响程度大小,对转动过度和转动不足状态的回归方程中回归系数(j=1,2,…,7)进行标准化,得到两种状态下自变量的标准化系数分别如表2、表3所示。

表2 转动过度状态标准化回归系数Table 2 Standardized regression coefficient under insufficient rotation

表3 转动不足状态标准化回归系数Table 3 Standardized regression coefficient under over rotation
按照模型I的设计尺寸和尺寸误差分析,平面度θ值主要处于转动过度的范围内,此时a6与θ呈正相关关系,即接头开孔圆心至侧板边缘实际尺寸与θ呈正相关关系。为减小θ值,可适当减小接头开孔圆心至侧板边缘基本尺寸CG。图7为ΔCG=0、-0Ʊ 02…-0Ʊ 12时,平面度均值μ以及满足95Ʊ 4%保证率的平面度分布范围[μ-2σ,μ+2σ]随ΔCG变化情况。表4为平面度的统计参数情况(样本数M=40 000,分组数N=200)。

表4 不同ΔCG下平面度分布参数值Table 4 Parameters of flatness under various ΔCG
由表4及图7中可以看出,随着尺寸的不断减小,平面度均值及分布范围沿纵坐标轴不断下移。通过调整CG的尺寸,可以实现将满足95Ʊ 44%保证率的平面度分布范围移动至±1°的设计要求范围之内
5 可展结构平面度测试及调整
采用摄影测量方法对可展结构平面度进行测量。测量设备包括高分辨率数码相机、定向反光标志(靶点)和数据处理软件3部分[12]。按照可展结构平面度评价指标,首先在中心节点的平面上均匀布置6个靶点,通过拟合得到中心节点平面的法向矢量;在每根杆件的上表面两端各布置1个靶点,得到各杆件上表面的平行矢量;最后通过矢量计算得到各杆件上表面与中心节点拟合平面的夹角。可展结构整体及中心节点处靶点布置如图8所示。
利用Photomodeler软件对照片进行处理,得到靶点的分布云图如图9所示。根据各个靶点之间的相对坐标,计算得到平面度的测量值。
利用上述方法对模型I的平面度进行测量,试验测得模型I平面度分布如图10所示。
测量结果表明:模型I的84根杆件中,平面度超出±1°范围的杆件数为24根,约占杆件总数的28Ʊ 6%,且最大值达到2.05°。经过拟合,模型I平面度满足均值μ=0.647°,标准差σ=0.708°的正态分布。因此,模型I的平面度较差,需进行进一步优化。同时,模型I测试结果和分析结果的均值、标准差虽然略有差异,但二者总体趋势基本相同,所以可以按照对平面度的分析在模型I的基础上进行调整和优化。
根据对平面度的分析可知,ΔCG在-0Ʊ 04到-0Ʊ 12之间时,满足95Ʊ 44%保证率的平面度分布范围都可以有效地控制在±1°范围以内。模型II的构件尺寸在模型I的基础上将接头开孔圆心至侧板边缘尺寸减小0.04 mm,即ΔCG=-0Ʊ 04。对模型II进行平面度测试和数据处理,其平面度分布如图11所示。
测试结果表明,模型II的平面度数值已经全部符合±1°以内的设计要求,说明该调整方法对于平面度的改善有较好的适用性。经计算,模型II平面度满足均值μ=0.272°,标准差σ=0.296°的正态分布。
模型I、模型II平面度试验测量值和模拟分析值进行正态分布拟合,各正态分布曲线如图12所示,各曲线参数信息如表5所示。
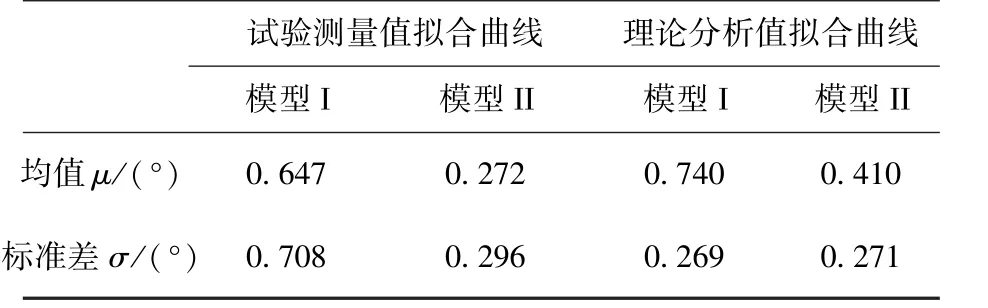
表5 正态分布曲线信息表Table 5 Parameters of distribution of flatness
比较图12中由平面度理论分析拟合的两条曲线可以看出,通过对接头开孔圆心至侧板边缘尺寸的调整,模型I和模型II平面度理论分析结果的分布离散程度基本不变;分布的均值由0.740°减小至0.410°,曲线的分布范围沿横轴向左平移。比较平面度试验测量值拟合的两条曲线可以看出,模型II的平面度分布比模型I在离散程度和均值方面均有了很大的改善,其中均值由0.647°减小为0.272°,曲线的分布范围沿横轴向左平移,与理论分析的结果一致;标准差由0.708°减小为0.296°,说明尺寸调整对平面度的改善可行。分别将模型I和模型II的理论分析值拟合曲线与试验测量值拟合曲线进行对比,从均值来看,理论分析值拟合曲线与试验测量值拟合曲线都十分接近,仅有约0.1°的偏离;从标准差来看,模型II的两条曲线离散程度更为接近,模型I试验测量值拟合曲线比理论分析值拟合曲线离散程度大。可以看出,模型II的构件加工质量要好于模型I,其试验测量结果与理论分析结果也更为接近。
6 结论
本文结合Monte Carlo法及多元线性回归方法分析了尺寸误差对弹性元件驱动单层构架式可展结构平面度的影响,分析结果表明可通过调整相关尺使平面度满足设计要求。
利用非接触测量法对可展结构模型I和模型II的平面度进行了测试。模型II是参考分析结果在模型I基础上减小接头开孔圆心至侧板边缘这一尺寸制作而成。测试结果表明模型II的平面度全部满足设计要求。
对模型I、II平面度的理论分析结果与试验测量结果进行了对比,结果表明,理论分析结果与试验测量结果较为一致。模型II的构件加工质量好于模型I,其试验测量结果与理论分析结果也更为接近。
(References)
[1] 申家双,陈波,翟京生,等.现代小卫星技术在对地观测中的应用[J].海洋测绘,2008,28(01):75⁃79.Shen Jiashuang,Chen Bo,Zhai Jingshen,et al.The technol⁃ogy of modern small satellites and its application in earth ob⁃servation[J].Hydrographic Surveying and Charting,2008,28(01):75⁃79.(in Chinese)
[2] 安君帅,张生玥,肖跃.国内外小卫星的发展现状及前景[C]//卫星通信学术年会.2016.An Junshuai,Zhang Shengyue,Xiao Yue.Development sta⁃tus and prospect ofmini⁃satellites at domestic and overseas[C]//Annual conference of satellite communications,2016.(in Chinese)
[3] 夏良毅.中国卫星投资价值分析[D].厦门:厦门大学,2014.Xia Liangyi.An Analysis on Investment Value of China Spac⁃esat Co.Ltd.[D].Xiamen:Xiamen University,2014.(in Chinese)
[4] 肖薇薇,陈务军,付功义.空间充气可展抛物面天线反射面设计与精度分析[J].哈尔滨工程大学学报,2010,31(02):257⁃261. Xiao Weiwei,Chen Wujun,Fu Gongyi.Analysis of the design and precision of an inflatable deployable parabolic reflector space antenna[J].Journal of Harbin Engineering University,2010,31(02):257⁃261.(in Chinese)
[5] 徐彦.充气可展开天线精度及展开过程分析研究[D].杭州:浙江大学,2009.Xu Yan.Precision and Deployment Analysis Researches for Membrane Inflatable Antenna[D].Hangzhou:Zhejiang Uni⁃versity,2009.(in Chinese)
[6] 王振峰.地面充气天线结构分析与精度测量[D].杭州:浙江大学,2008.Wang Zhenfeng.The Structure Analysis and Accuracy Meas⁃urement of the inflatable Antenna on Earth[D].Hangzhou:Zhejiang University,2008.(in Chinese)
[7] 杨东武,尤国强,保宏.抛物面索网天线的最佳型面设计方法[J].机械工程学报,2011,47(19):123⁃128.Yang Dongwu,You Guoqiang,Bao Hong.Best geometry de⁃sign method for paraboloid reflectors of mesh antenna[J].Journal of Mechanical Engineering,2011,47(19):123⁃128.(in Chinese)
[8] 狄杰建.索网式可展开天线结构的反射面精度优化调整技术研究[D].西安:西安电子科技大学,2005.Di Jiejian.On Optimal Adjusting Technology for Reflectors Precision of theCable⁃net Deployable Antenna Structures[D].Xi’an:Xidian University,2005.(in Chinese)
[9] 王勇帆.网状可展天线反射面形面精度分析[D].哈尔滨:哈尔滨工程大学,2013.Wang Yongfan.Reflector precision analysis ofcable⁃net De⁃ployable Antenna[D].Harbin:Harbin Engineering Universi⁃ty,2013.(in Chinese)
[10] 房建成,祝世平,周锐,等.太阳帆板平面度测量系统[J].北京航空航天大学学报,2000,26(2):244⁃248.Fang Jiancheng,Zhu Shiping,Zhou Wenbo,et al.Solar pan⁃el substrate planeness measuring system[J].Journal of Bei⁃jing University of Aeronautics and Astronautics,2000,26(2):244⁃248.(in Chinese)
[11] 方东阳.形位精度数字化设计与评价技术的研究[D].郑州:郑州大学,2004.Fang Dongyang.Study onAuto⁃forming Geometric Tolerance Design and Evaluating Technologies[D].Zhengzhou:Zheng⁃zhou University,2004.(in Chinese)
[12] 黄桂平.数字近景工业摄影测量关键技术研究与应用[D].天津:天津大学,2005.Huang Guiping.Study on the Key Technologies of Digital Close Range Industrial Photogrammetry and Applications[D].Tianjin:Tianjin University,2005.(in Chinese)
(责任编辑:龙晋伟)
Analysis and Measurement of Flatness of a Single⁃Layer Deployable Truss Structure Driven by Elastic Components
WU Minger1,ZHANG Zhenchang1,GUAN Fuling2
(1.Department of Structural Engineering,Tongji University,Shanghai 200092,China;2.Space Structures Research Center,Zhejiang University,Hangzhou 310038,China)
According to the structural characteristics of a single-layer deployable truss structure driven by elastic components,the flatness of the structure was defined.The influence of dimension error on the flatness was analyzed by using Monte Carlo method and multiple linear regression meth⁃od.The flatness of deployable structure Model I and Model II was measured with a non-contact measurement method.According to the analytical results,the dimension of the joint hole to the side panel was adjusted in Model II.It was showed that the flatness of Model II was improved and could meet the design requirements.The method for adjustment of dimension to improve the flatness of the deployable structure was effective.
deployable structure;flatness;non contact measurement;error analysis
V423
A
1674⁃5825(2017)04⁃0529⁃07
2017⁃01⁃18;
2017⁃06⁃27
吴明儿,男,博士,教授,研究方向为空间结构设计。E⁃mail:wuminger@tongji.edu.cn
