复飞航迹优化模型初步研究
2017-08-10张淼冯晓磊
张淼,冯晓磊
(1.中国民航机场建设集团西南分公司,成都 610202;2.中国民航飞行学院机场工程与运输管理学院,广汉 618307)
复飞航迹优化模型初步研究
张淼1,冯晓磊2
(1.中国民航机场建设集团西南分公司,成都 610202;2.中国民航飞行学院机场工程与运输管理学院,广汉 618307)
根据现有飞行程序设计规范,设计优化复飞航迹的计算模型。基于对机场终端区的地理信息数据的分析,叠加设计的复飞航迹模型,计算得出优化的复飞航迹路径。结果表明,将复飞程序设计与地理信息数据相结合,可有效提升复飞航迹设计效率和精度,并降低重复绘制工作量。
飞行程序设计;航迹优化
0 引言
机场的仪表飞行程序包括标准仪表进场程序、标准仪表离场程序、进近程序、复飞程序和供航空器盘旋的等待程序,在程序设计中,这些程序各自独立而又联系紧密。其中,复飞程序是仪表飞行程序中的重要组成部分。进港航空器在进近着陆过程中发生突发状况,或者由于天气或其他原因,导致航空器不能按照仪表进近安全着陆时,航空器按照复飞程序拉起复飞,是一种保护程序。
传统飞行程序设计工作的设计过程存在计算量大、保护区绘制繁杂并且重复绘制工作较多,绘制的航迹过于固定,航迹的合理性和可操作性较差等问题,导致数据误差和手工绘制的误差不断累积,因此,在设计复飞程序时,航迹的标准性和准确性难以保证。近年来,基于地理信息数据,飞行程序设计趋向于自动化发展,但是完整的飞行程序仍难以实现全自动化设计。为提升程序设计精度,提高程序设计人员工作效率、降低重复性工作量,构建复飞航迹优化模型,借助计算机实现复飞程序的自动化设计。
1 复飞程序及模型
复飞程序是最后进近阶段后的衔接阶段,复飞阶段需要规定两个点,即复飞程序的开始点和复飞程序的终点。按照航空器的飞行阶段来划分,复飞程序一般包含三个阶段,如图1所示。
(1)起始阶段:从MAPt开始,至开始爬升点(SOC,Start Of Climb)为止;
(2)中间阶段:从SOC延伸至取得50米超障余度并能保持的第一个点;
(3)最后阶段:从中间阶段延伸至终点。飞越终点后,按照地面指挥重新加入进近、等待盘旋或返回航路。

图1 复飞程序阶段示意图
复飞程序起始阶段是复飞程序中最关键的阶段,航空器驾驶员需要全神贯注操作航空器,建立爬升和改变飞机形态[1]。复飞程序考虑的就是在特殊情况下,航空器不能保证安全着陆,所以一般假定在起始阶段的操作过程中引导设备是不完全工作的。即是说,在这个阶段航空器尽可能的不要改变飞行方向,且起始航段的飞行航迹应当尽可能保持水平。复飞起始保护区的超障余度与前一航段最后进近的超障余度相同[2]。
2 复飞航迹优化模型
从起始点开始,复飞航迹根据模型计算每一点的位移高度和梯度确定。航迹移动是立体的,分为水平和竖直两个方向。由于普通的正方体模型不能清晰地体现位移方位,故设计的航迹搜索模型为一个球体,而不是传统的正方体栅格。球体模型有规定移动方向和范围,默认按直线移动,爬升梯度2.5%。移动方向在左右15°内调整,爬升梯度最大达到5%。每个航迹点的位移步长,即球体的半径,按照航迹长度的增加而线性增长。初始位移步长为5m,最大为30m。模型如图2所示。
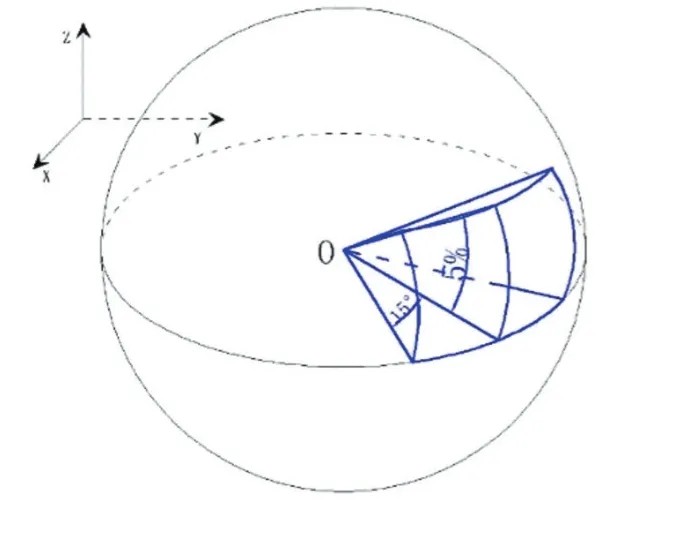
图2 航迹移动模型示意图
模型使用初始条件:
(1)复飞航线直线段方位角|α|≤150
(2)|αNDB|≤10.3°
(3)|αVOR|≤7.8°
(4)|XNDB|≤2.3km
(5)|XVOR|≤1.9km
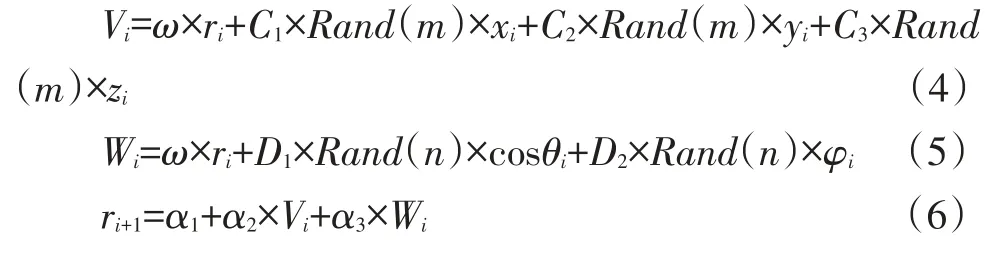
最后进近决断点作为起始点,坐标为(0,0,0),航迹点的坐标公式为:

其中,r就是位移步长(m),5≤r≤30;cosθ表示爬升梯度,2.5%≤cosθ≤5%;
φ表示水平方向,0≤φ≤15°。
为了避免搜索地形数据时出现遗漏,构造一个特定的步长增长函数。同时,为了得到与最低运行标准最接近的最优解,还需要考虑最优情况的约束条件。航迹偏置和爬升梯度的增加值是约束最优解的主要因素。因此,需要增加这两个约束因素的权值,水平方向偏离越大或者爬升梯度的变化值越大则权越小。
ω是步长保持增长的参数,控制搜索的精度,其取值介于0.1和0.9之间,值越大则搜索模型在更大的空间内进行搜索,值越小则能够更精确地找到最优解。根据飞行程序保护区的特性,我们在区间[0.5,0.9]每间隔0.05取一个ω值,多次试算验算得出,当ω=0.75时最符合保护区要求,因此在本算法中我们将ω设定为0.75。
通过Rand函数来获取随机数。在初始化计算模型时,随机设置模型的水平移动初速度和移动步长。
C1、C2和C3是横纵竖三个方向的运动参数。按照航迹模型设计,设定C1=cosφ,C2=2,C3=cosθ。
D1和D2是约束航迹偏置和爬升梯度变化的权值。D1和D2相互约束,已经生成航迹的偏置值和爬升梯度对其有累积影响。航迹偏置越大时,D2越小;爬升梯度的变化越大时,D1越小。
3 复飞航迹设计算法与验证
复飞航迹起始是从复飞点开始,由于复飞点与前一航段最后进近程序是相关的,故本研究直接初始规定复飞点位置。故基于上述模型的复飞航迹设计的实现步骤如下:
第一步,确定复飞程序起始爬升点位置,从复飞点位置开始,根据导航台的位置和类型,对应计算起始爬升点位置;
第二步,以起始爬升点为起点,依据航迹选择移动模型,搜索机场终端区地理信息数据,进行复飞程序的航迹搜索过程,包括水平方向搜索和竖直方向搜索两个方向,确定复飞航迹下一点的最优位置;
第三步,将搜索到的合适航迹位置点加入航迹点集,并更新航迹移动模型参数,再次进行航迹移动搜索;
第四步,根据复飞转弯点的选择算法确定第三步搜索的航迹点是否满足转弯的最低标准,如果满足转弯要求,则该复飞航迹点集所连成的航迹线即为最终的复飞航迹,否则,返回第二步重新进行复飞航迹的搜索确定,最终得出最优的复飞航迹。
复飞航迹确定的流程如图3所示。

图3 复飞航迹确定流程图
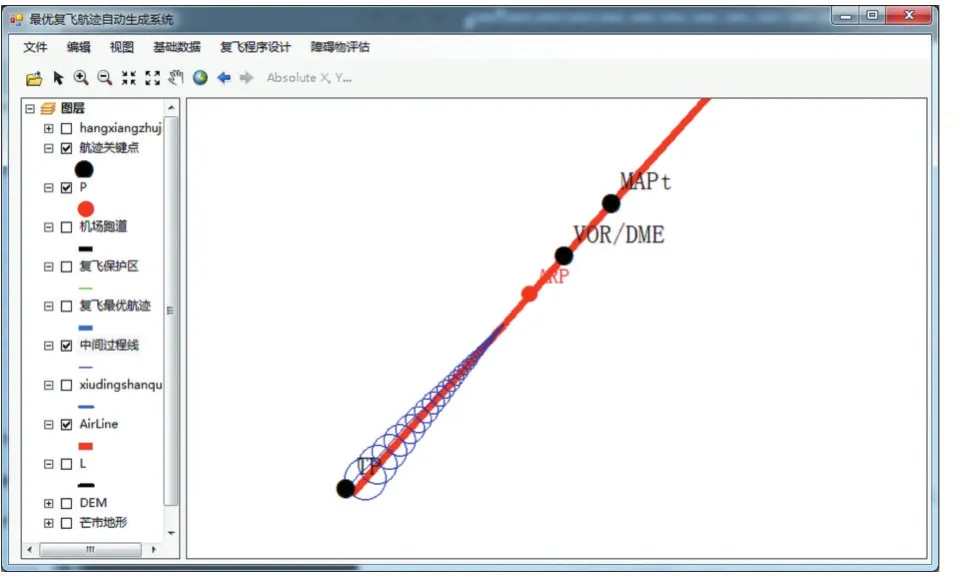
图4 确定复飞程序关键点位置
如图4所示,在确定了机场位置,跑道长度和方向后,应用航迹移动模型功能,需找到复飞程序航迹的关键点位置。其中,复飞点位于距离导航台4260米处,复飞转弯点位于距离导航台9600米处。应用航迹选择模型,从复飞点开始,依此确定航迹路径,从而生成复飞最优航迹。
如图5所示,根据航迹移动的中间过程线,最终生成复飞程序的最优航迹,红色线为跑道中心线的延伸线,蓝色线为生成的最优航迹。可以看出,最优航迹与中心延长线有少许偏置,这也说明最优的航迹不一定是直线。

图5 生成复飞最优航迹
最后,根据优化后的复飞航迹,绘制出相应的复飞程序保护区,如图6所示。
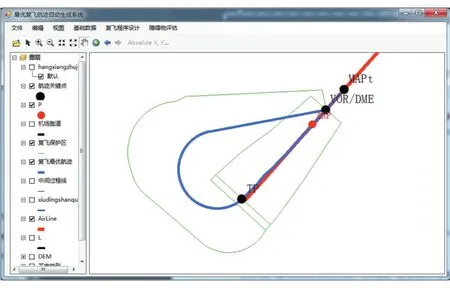
图6 根据复飞最优航迹自动生成复飞程序保护区
4 结语
近年于GIS技术发展迅速,随之基于地理信息数据进行飞行程序设计成为发展的一个方向。考虑飞行程序设计规范要求,结合地理信息系统的数据和数据分析处理,能较为直观地完成设计工作。同时,自动优化航迹模型能将设计人员的重复工作量大大降低,提高实际的设计效率。下一步的研究将是完整飞行程序的自动化设计。
参考文献:
[1]项恒,赵嶷飞.仪表飞行程序辅助设计研究与实现[J].中国民航学院学报,2004,22(5):18
[2]朱代武,何光勤.目视和仪表飞行程序设计[M].成都:西南交通大学出版社,2004.
[3]国际民用航空公约.附件14机场[Z],2009.
Research on Missed Approach Flight Path Optimization Model
ZHANG Miao1,FENG Xiao-lei2
(1.Southwest Subsidiary Company of CAAC,Chengdu 610202;2.School of Airport Engineer and Transportation Management,Civil Aviation Flight University of China,Guanghan 618307)
According to the existing flight procedure design specification,designs an optimization model of missed approach flight path.Based on the analysis of the geographic information data of the airport terminal area,obtains the optimal flight path.The results show that the design effi⁃ciency and precision can be greatly improved by combining geographic information data and flight procedure design.
张淼(1989-),男,四川成都人,硕士研究生,中国民航机场建设集团西南分公司,设计师
2017-03-16
2017-05-10
1007-1423(2017)15-0013-04
10.3969/j.issn.1007-1423.2017.15.003
冯晓磊(1987-),男,山东临朐人,硕士研究生,中国民航飞行学院机场工程与运输管理学院,助教
Flight Procedure Design;Optimal Flight Path
